中型無人直升機內環控制器的設計與實現
2024-08-31 00:00:00李晨毓姚志豪祖家奎桑可可
機械制造與自動化 2024年3期



















摘 要:針對某中型無人直升機對內環控制的特殊需求,考慮模型參數不確定以及各種擾動對無人直升機控制的影響,設計一種基于線性自抗擾的內環控制系統,實現無人直升機控制系統對不確定擾動的抑制。介紹無人直升機動力學建模、穩定性分析、內環控制器設計與仿真驗證的一整套設計流程。結果表明:所設計的內環控制器能夠滿足技術需求,有很好的抗擾效果,達到了預期的研究目標。
關鍵詞: 無人直升機;內環控制器;線性化模型組;線性自抗擾
中圖分類號:TP23; V249.1文獻標志碼:B文章編號:1671-5276(2024)03-0243-06
Design and Implementation of Inner Loop Controller for Plant Protection Unmanned Helicopter
Abstract:In line with the special demand of a certain type of plant protection unmanned helicopter for inner loop control and in consideration of the influence of model parameter uncertainty and various disturbances on the control of unmanned helicopter, an inner loop control system based on linear auto disturbance rejection is designed to realize the suppression of uncertain disturbances by the unmanned helicopter control system. This paper introduces a complete set of design flow of dynamics modeling, stability analysis, inner loop controller design and simulation verification of unmanned helicopter. The results show that the designed inner loop controller can meet the technical requirements with good anti-interference effect and the achievement of the expected research objectives.
Keywords:UMH;inner loop controller;linearized model group;LADRC
0 引言
無人直升機作為傳統直升機的延伸產物,具有的獨特飛行能力和應用價值,也是飛行器控制領域的研究熱點[1]。飛控系統作為無人機的核心部分,在整個無人機系統中起著至關重要的作用。無人直升機飛控系統的主要作用是通過機上的各種傳感器獲取飛機的實時狀態信息,再通過相應的計算處理,解算出無人機各個執行機構的控制量。飛控的主要任務是保證無人機的穩定飛行,在穩定飛行的基礎上不斷提高無人機的飛行品質。設計研究出可靠、穩定和具有高飛行品質的內環控制系統,可以為后續無人直升機的進一步發展打下堅實的基礎,在科研和實際應用方面都具有非常重要的意義[2-3]。
本文結合某課題需求,針對一款中型無人直升機的內環控制器展開研究設計,該內環控制為姿態控制。結合該中型無人直升機的線性化模型進行特性分析,針對該無人直升機面臨的魯棒性問題,設計出橫向、縱向、偏航3個通道的線性自抗擾控制器,通過擴張狀態觀測器對系統內部不確定參數和未知外部擾動進行估計,實現控制器的穩定性、魯棒性、抗擾性及跟蹤性。
1 需求分析
本文旨在針對DWK700中型無人直升機(主要技術參數如表1所示)設計一套內環控制系統。在無人直升機應用的各個領域對姿態保持都有很高的要求,如目標跟蹤、農藥噴灑等。姿態的異常抖動都會對任務的執行帶來很大的影響,如被跟蹤的目標脫離視野、農藥噴灑不均勻等。所以在無人直升機作業過程中,對姿態的保持有著較高的要求。
本文需要針對一種控制量干擾,如舵機異常或人為操縱失誤造成的控制量異常抖動來設計一款有著較好抗擾效果的內環控制器。
2 中型無人直升機數學模型
對于單旋翼帶尾槳的常規布局無人直升機而言,通過分析其主要氣動部件的氣動力學特性,得到其對應的力與力矩方程(如主旋翼氣動力模型、機身氣動力模型、尾槳氣動力模型和安定面氣動力模型等)從而建立無人直升機的非線性動力學微分方程組。
在機體坐標系下,無人直升機的合力FB與合力矩MB表示為:
式中:Fx、Fy、Fz分別表示無人直升機在x、y、z方向上的分力;XG、YG、ZG分別表示重力在x、y、z方向上的分力;Xmr、Ymr、Zmr、Xtr、Ytr、Ztr、Xvf、Yvf、Zvf、Xhf、Yhf、Zhf、Xxy、Yxy、Zxy分別表示主旋翼、尾槳、垂尾、平尾與機身分別在x、y、z上產生的分力;L、M、N分別表示滾轉力矩、俯仰力矩及偏航力矩;Lmr、Mmr、Nmr,Ltr、Mtr、Ntr,Lvf、Mvf、Nvf,Lhf、Mhf、Nhf,Lxy、Mxy、Nxy分別表示主旋翼、尾槳、垂尾、平尾與機身的滾轉力矩、俯仰力矩及偏航力矩。
根據牛頓第二定律F=ma,得到直升機的動力學方程:
式中:m為無人直升機的質量;W為無人直升機姿態角速度;E為角速度轉換矩陣;I為轉動慣量矩陣。
直升機機體合力在3個坐標軸方向上的分力計算方程為
式中:u、v、w分別為直升機在大地坐標系下的三軸線速度;p、q、r分別為滾轉角速率、俯仰角速率、偏航角速率。
機體坐標系中,直升機在外力矩作用下的角運動方程為[4]
即
且
式中:Ixx、Iyy、Izz分別為繞x軸、y軸、z軸的轉動慣量,慣性積Ixz為0。
由此可得,直升機的非線性動力學方程為
由于無人直升機非線性模型的一些局限性,給后續的模型特性分析和控制律設計帶來了很大難度,同時其建模難度過大且精度不高,故需要將此非線性模型轉化為線性化模型再進行分析設計。
將直升機在各個飛行平衡狀態下的運動方程進行泰勒展開,忽略高階導數后,各個狀態參量表示為基準值加上一個增量[5],可以得到增量形式的無人機線性狀態方程為
式中A、B分別為狀態轉移矩陣與輸入矩陣。
本課題組在長期的項目經驗積累中發現,在無人直升機處于平衡狀態下,其航向通道不會隨其他狀態的變化導致受力不同,所以可以將原無人直升機的9階狀態方程簡化為下式中的8階[6]:
Δx=[ΔuΔvΔwΔpΔqΔrΔφΔθ]T(10)
Δu=[ΔulatΔulonΔupedΔucol]T(11)
3 穩定性分析
直升機的運動是一個縱橫向耦合嚴重的運動,為了更精確地分析無人直升機橫縱通道的穩定特性,將兩個通道分離開來進行相應的響應繪圖與分析。基于內環的橫縱向運動包括滾轉角、滾轉角速率、偏航角、俯仰角、俯仰角速率運動[7]。本節以無人直升機懸停、前飛10m/s與20m/s的狀態為例,對橫向與縱向的穩定性進行分析。
3.1 縱向模態
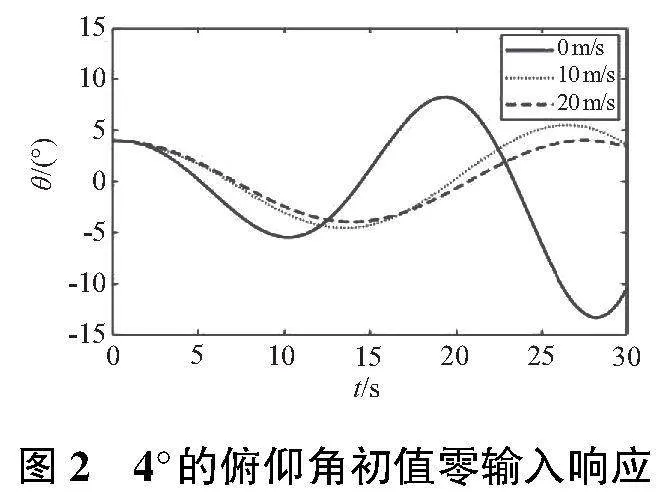
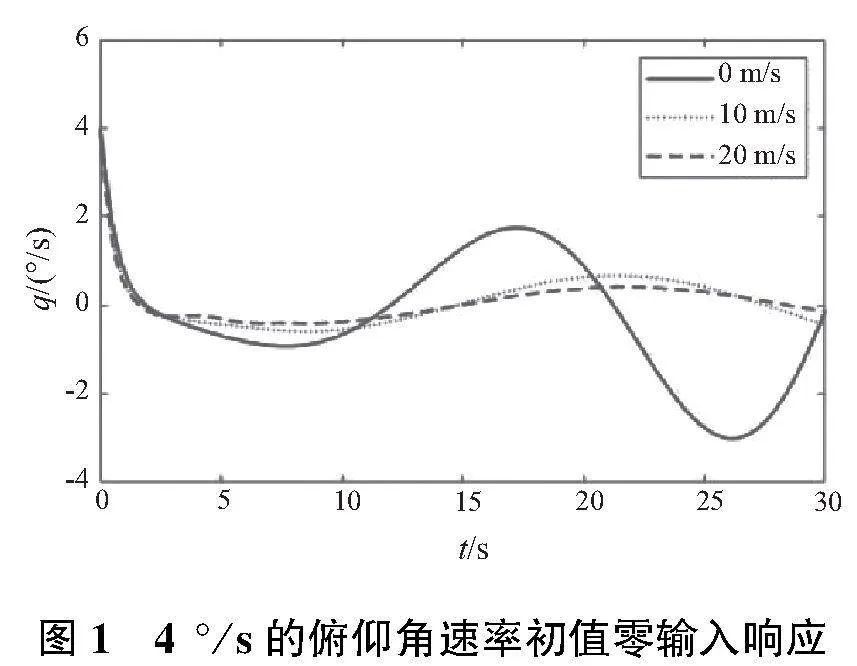
對于縱向的穩定性分析,分別給定4°/s的俯仰角速率初值、4°的俯仰角初值來觀察對應俯仰角速率、俯仰角的零輸入響應(圖1)。兩種響應所對應的模態分別為俯仰阻尼模態、俯仰震蕩模態。
由圖1可以看出俯仰阻尼模態在短周期內是穩定的,隨著速度的不斷增大,衰減的速度也在不斷增大。由圖2可知,縱向震蕩模態是一個不斷震蕩最終發散的模態。待俯仰阻尼模態快速表現過后,縱向震蕩模態開始有所顯現,逐漸震蕩最終發散,但隨著速度的不斷增大,震蕩的幅度有所緩解,但仍然處于發散狀態。
由上述分析可知,雖然速度的增大可以緩解縱向的不穩定性,但遠遠達不到控制所需的穩定性要求,所以縱向控制主要目的是解決飛行的穩定性,在達到穩定性要求的基礎上增大阻尼。
3.2 橫航向模態
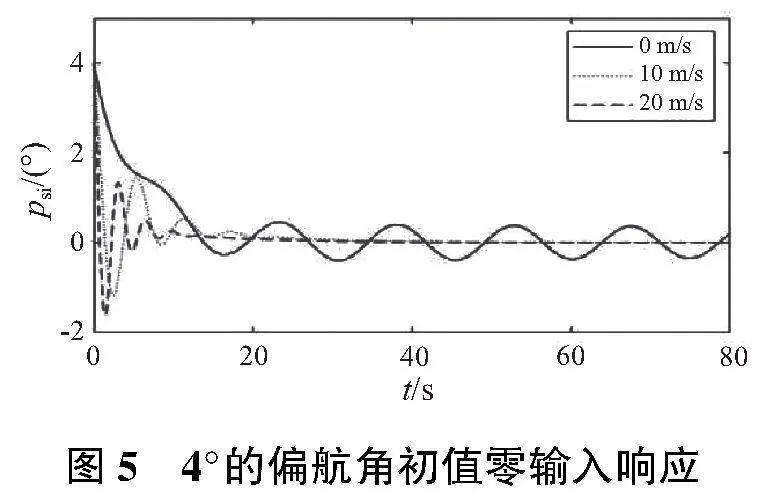
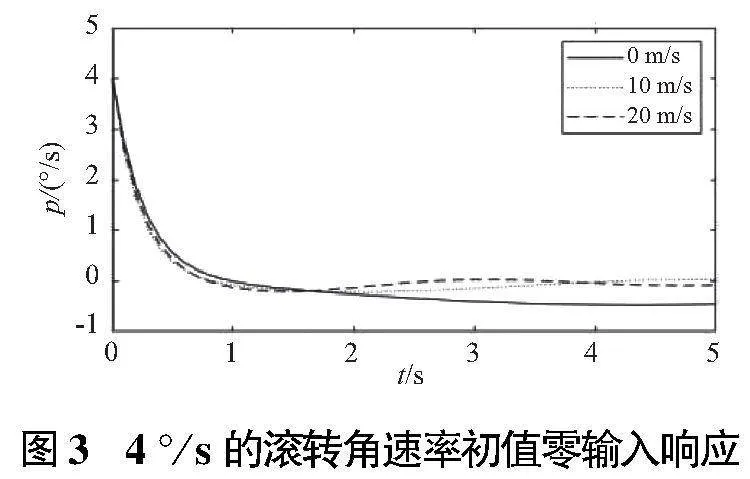
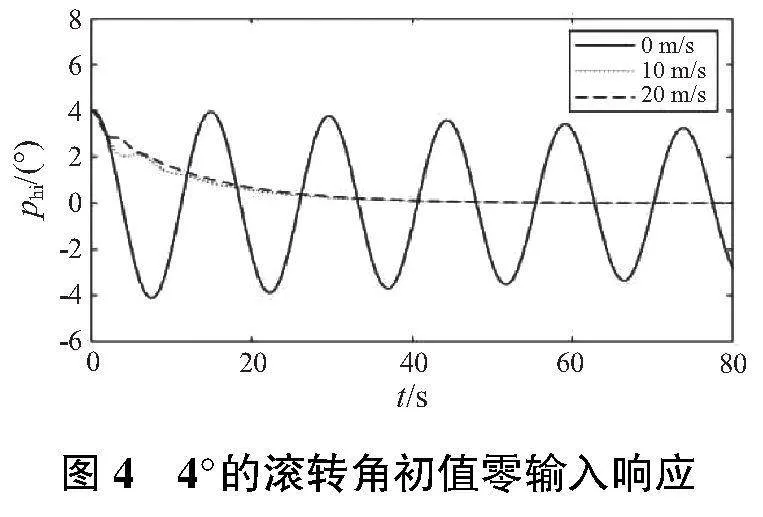
對于橫航向的穩定性分析,分別給定4°/s的滾轉角速率初值、4°的滾轉角初值、4°的偏航角初值來觀察對應滾轉角速率初值、滾轉角、偏航角的零輸入響應。
橫航向模態中短周期模態為滾轉阻尼模態,滾轉角速率受擾后的響應屬于滾轉阻尼模態。由圖3可知,該模態衰減速度很快,是一個穩定的模態。長周期模態為橫向震蕩模態,滾轉角受擾后的響應屬于橫向震動模態,其動態響應如圖4所示,有收斂趨勢,但由于阻尼不足,衰減較慢。偏航角收到擾動后如圖5所示,由于直升機的尾槳會提供一定的反作用力,增強了該方向上的阻尼,使得擾動衰減。與縱向模態相同,隨著無人直升機飛行速度的不斷增加,擾動衰減的速率也會不斷增加,但運動響應仍然不夠理想。所以通過分析,與縱向模態不同,橫航向模態在控制方面的主要需求為加快響應時間,以提高無人直升機的控制質量。
4 操縱性分析
該無人直升機的操縱特性分析主要從操縱靈敏度的角度展開。在無人直升機不加控制的前題下,通過觀察各個控制通道在1°控制變距下的狀態變化情況來研究無人直升機在整個飛行包線下的控制靈敏程度。
分別給定1°的縱向變距、橫向變距和尾槳距,觀察其俯仰通道,滾轉通道和尾槳通道的響應曲線如圖6—圖8所示,分析其3個通道的操縱性。
從圖6—圖8可以看出,在懸停階段,直升機三通道的操縱靈敏度較大,轉為前飛段后,3個通道的操縱靈敏度都有減小。這是因為前飛段速度的增加導致氣動阻尼和懸停階段的相比增大,因此各通道單位周期變距引起的變化值減小,表現為操縱靈敏度下降。
5 控制方法研究
傳統無人直升機控制采用的是PID控制,多年來在工程實踐中廣泛使用,但是PID控制在抗擾方面表現得較為乏力。自抗擾控制器(ADRC)采用以下策略對上述傳統PID所面臨的一些缺陷進行了改進,很好地提高了控制器的性能,使控制效果更優,其主要由跟蹤微分器、擴張狀態觀測器和非線性狀態誤差反饋控制律三部分組成[8]。
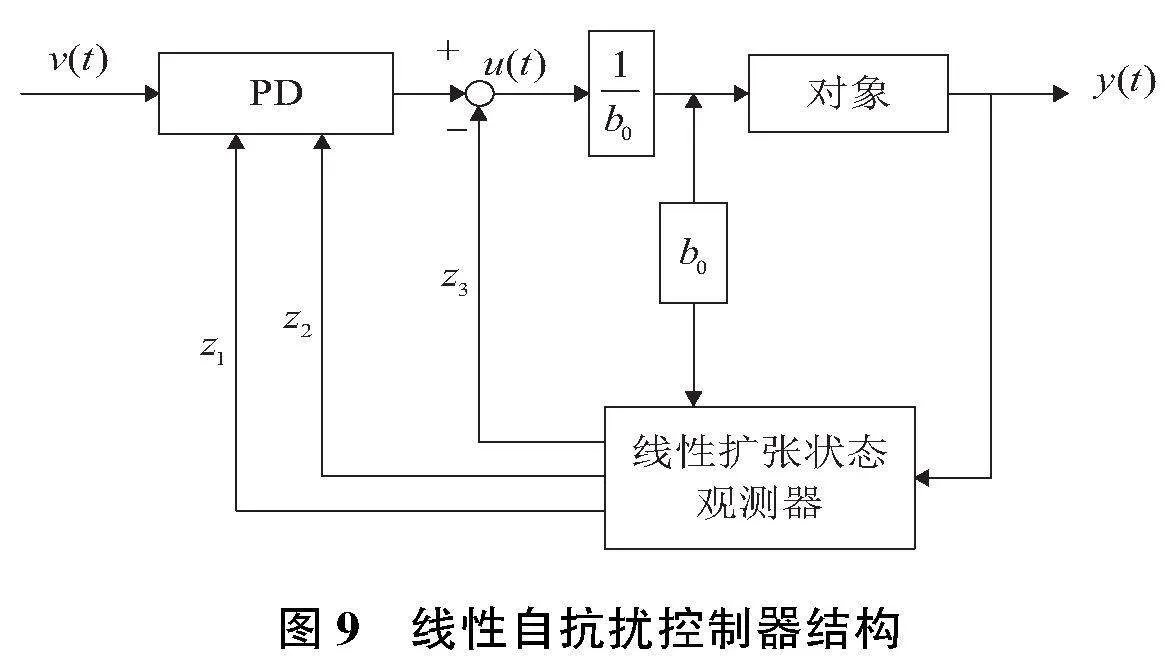
自抗擾控制的一個不足就是控制器內需要整定的參數多且難以整定,并且非線性反饋的參數比線性反饋(LSEF)更加難整定,因此本文基于LADRC進行無人直升機內環控制器的設計。所使用的線性自抗擾控制器結構如圖9所示。
5.1 線性擴張狀態觀測器(LESO)
以二階被控對象為例,設被控對象:
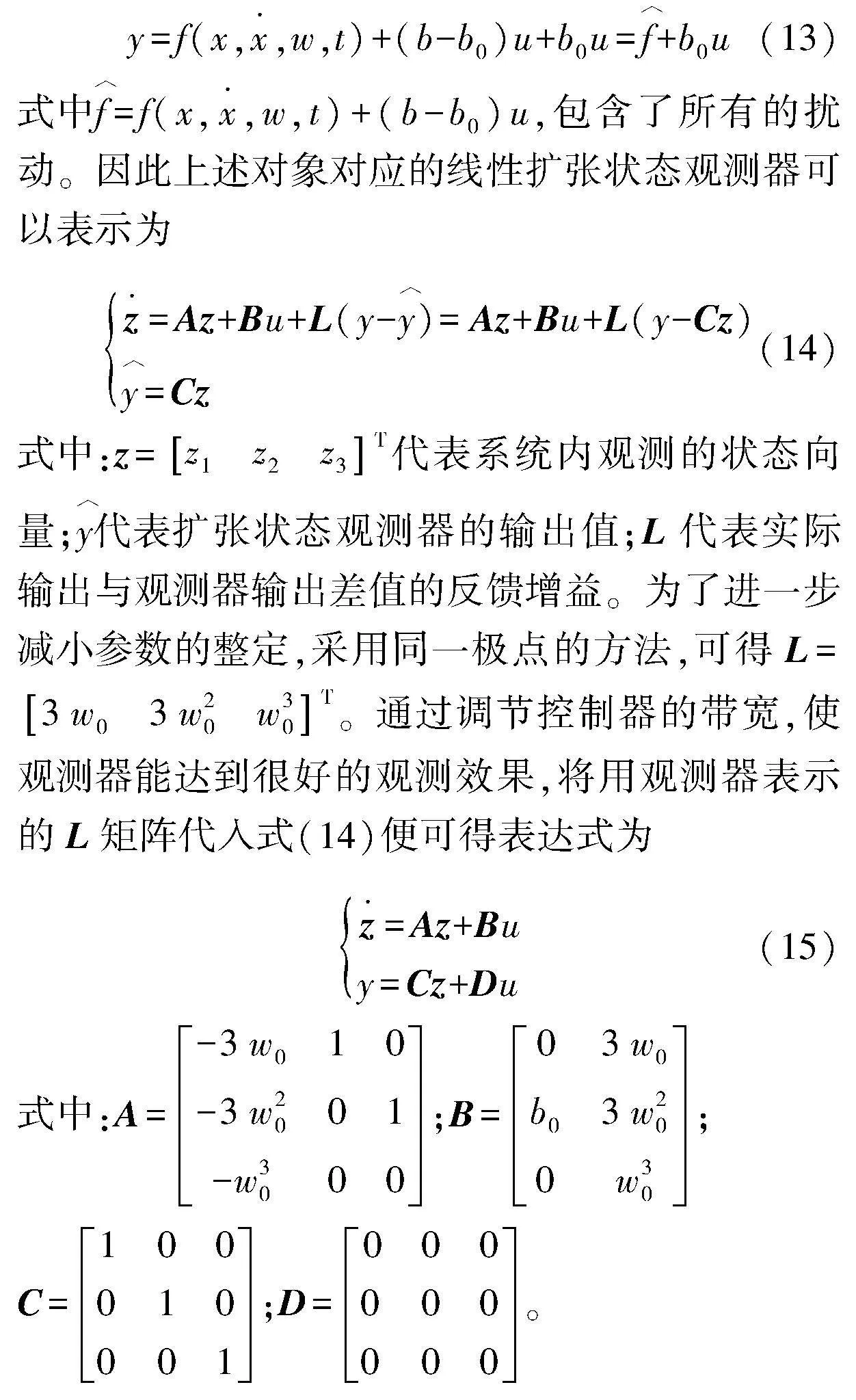
式中:x為原系統中待觀測的狀態;y為系統的輸出;u為系統的輸入;w為系統運行時遇到的擾動;b用來表示輸入總增益。為了描述出系統的未知增益部分,將總增益中已知增益部分用b0表示,所以上式可改寫為
5.2 線性狀態誤差反饋控制律
由式(14)可以看出,LESO可以起到估計擾動與誤差的作用,所以可將傳統的PID進行簡化,舍去不需要的積分控制,所以LSEF可寫成如下形式:
u0=Kp(v-z1)-Kdz2(16)
式中:v為設定的目標值;z1、z2為LESO輸出的狀態;Kp、Kd分別為比例P與微分D的增益。
對上式進行降階簡化后可以表示為
如此一來,閉環傳遞函數就成了一個無零點的二階傳遞函數系統:
令Kp=w2c ,Kd=2wc,這兩個參數都由控制器帶寬wc決定,因此只需要改變帶寬wc,就能夠確定線性狀態誤差反饋控制律。
5.3 內環控制器設計
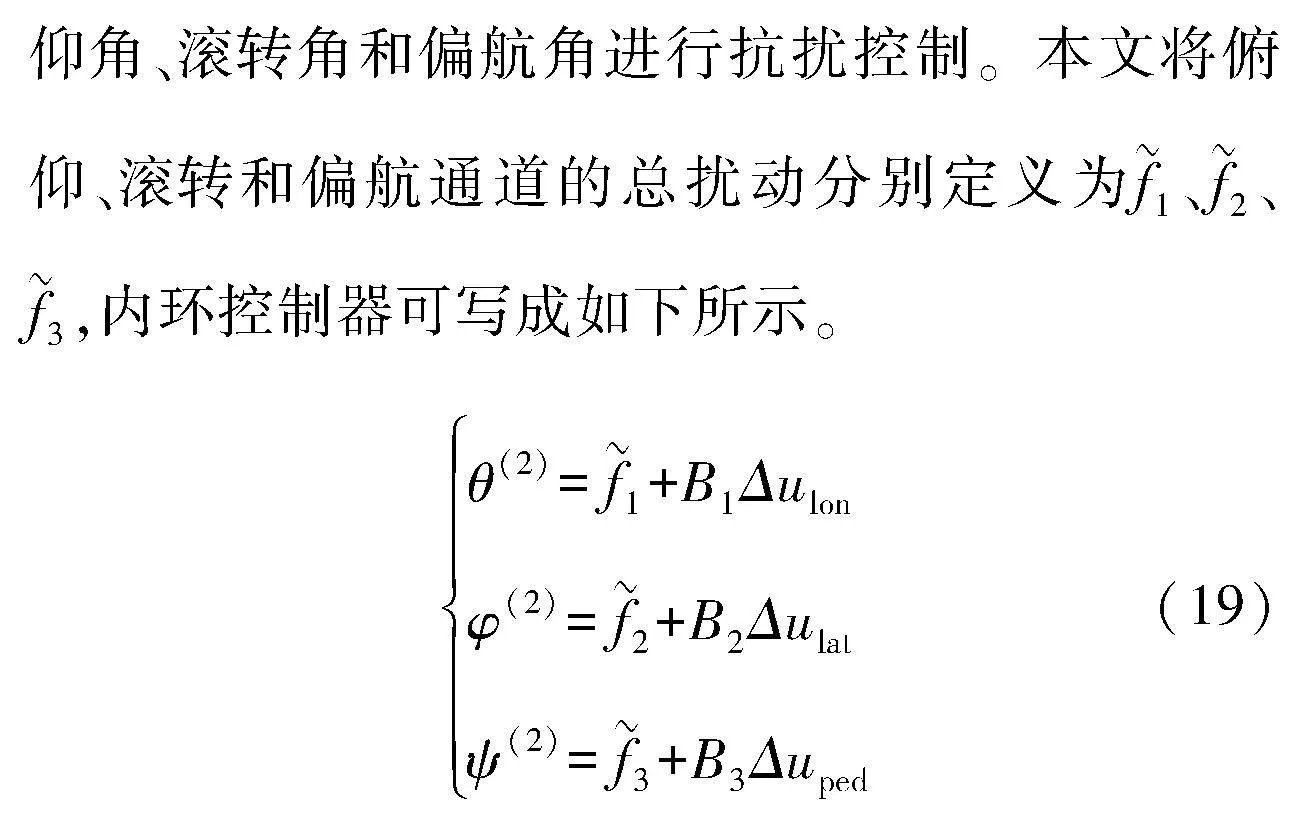
內環控制(姿態控制)對于飛行器而言是至關重要的一部分。由于飛行器的特殊性,在飛行過程中保持正確的姿態是其維持正常工作的基本條件[9]。線性自抗擾控制器能夠估測出系統的總擾動,再通過反饋控制律對系統進行擾動補償。本文分別對俯仰通道、滾轉通道、偏航通道設計了一個二階的線性自抗擾控制器對無人直升機的俯
式中B1、B2、B3分別表示所要設計的各個通道的已知通道增益。所以本文所要設計的基于線性自抗擾內環控制器的結構框圖如圖10所示,φr、θr、Ψr分別為滾轉角、俯仰角、偏航角的參考值。
6 仿真驗證
本文在Simulink仿真環境下基于無人直升機線性化模型組,以懸停、前飛10m/s狀態為例,觀察該無人直升機姿態指令的跟蹤效果。俯仰角、滾轉角和偏航角的響應曲線如圖11、圖12所示。
由圖11、圖12所示的3個速度狀態下的3個通道的指令響應曲線可以看出,LADRC的收斂速度較快,超調小且沒有誤差,相比PID有較好的控制效果。
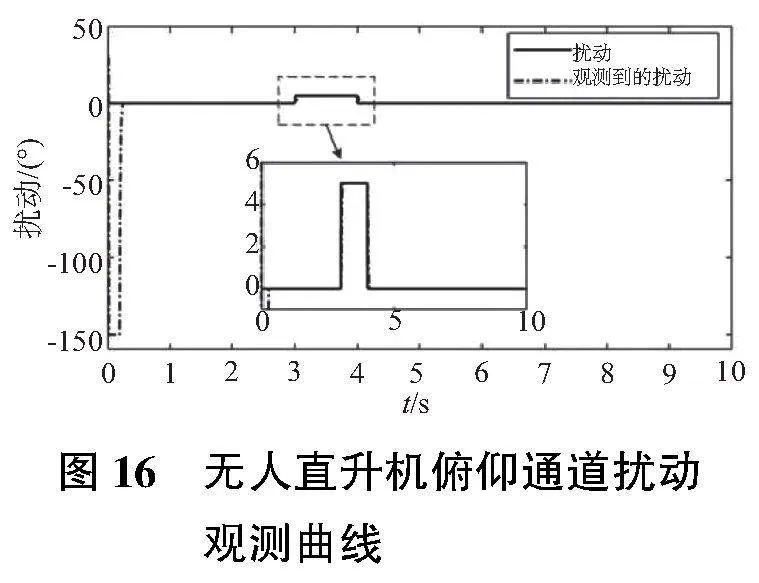
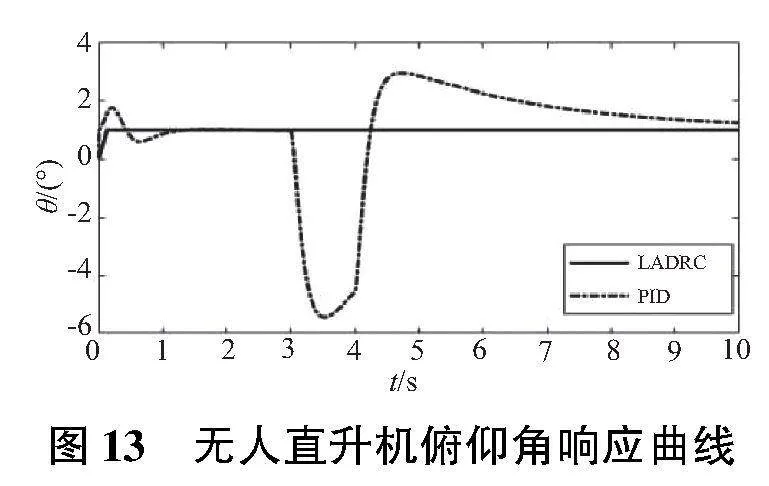
以直升機懸停狀態為例,在3s時刻分別給定直升機的俯仰、滾轉和偏航通道幅值5°、持續時間為1s的變距干擾,觀測3個通道的抗擾效果。由圖13—圖15可以看出,常規PID控制方法在擾動來臨時,無人直升機姿態晃動較大,且需要很長時間才能恢復到原有平衡狀態,而在LADRC控制下的姿態幾乎沒有收到什么影響。
圖16—圖18為擾動來臨時,LADRC中LESO對擾動的觀測情況。
由圖16—圖18觀測曲線可知,LESO可以很好地觀測到擾動,進而通過估計補償抵消擾動帶來的影響,從而起到抗擾的效果。
7 結語
本文基于某型號無人直升機完成了無人直升機建模、特性分析和內環控制器設計等流程,通過仿真結果對比,本文所設計和實現的直升機內環控制器可以加強姿態回路的魯棒性和穩定性,達到了預期的效果。
參考文獻:
[1] 王鵬.無人直升機發展現狀及技術難點[J].計算機產品與流通,2018(1):91-92.
[2] AHMED B,KENDOUL F. Flight control of a small helicopter in unknown wind conditions[C]//49th IEEE Conference on Decision and Control (CDC). Atlanta,GA,USA:IEEE,2011:3536-3541.
[3] LAI Y C,LE TRI Q. System identification and control of a small unmanned helicopter at hover mode[C]//2017 2nd International Conference on Control and Robotics Engineering (ICCRE). Bangkok,Thailand:IEEE,2017:92-96.
[4] 王云霞,代冀陽,王村松,等. 一種線性自抗擾控制器的無人直升機姿態控制方法研究[J]. 計算機應用研究,2019,36(6):1753-1757.
[5] 王云霞. 基于線性自抗擾控制的無人直升機路徑跟蹤方法研究[D]. 南昌:南昌航空大學,2018.
[6] 尹亮亮. 無人直升機飛行控制若干關鍵技術研究[D]. 南京:南京航空航天大學,2012.
[7] 繆麗娟. 小型無人直升機懸停與低速段飛行控制律研究[D]. 南京:南京航空航天大學,2014.
[8] 韓京清. 自抗擾控制技術[J]. 前言科學,2007(1):24-31.
[9] 劉澤群. 無人直升機飛行控制及視景仿真實現[D]. 南昌:南昌航空大學,2019.
