基于干擾觀測器的AUV三維路徑滑模跟蹤控制
2024-08-31 00:00:00王慶楠王娜李廣有尹慶華
機械制造與自動化 2024年3期

























摘 要:為了確保欠驅動自主式水下機器人(AUV)在受到外界干擾情況下仍然可以實現對三維路徑的跟蹤控制,設計基于干擾觀測器的反步滑模控制器。針對欠驅動AUV 5自由度狀態方程,考慮外界干擾對AUV運動的影響,設計干擾觀測器實時估計干擾;通過欠驅動AUV的狀態方程與三維路徑跟蹤誤差模型得到系統的鎮定模型;利用得到的干擾估計值,設計反步滑模復合控制器來控制AUV實現三維路徑跟蹤,并通過Lyapunov穩定性理論證明閉環系統漸近穩定。仿真結果表明:該控制器對欠驅動AUV實現三維路徑的精確跟蹤有良好的控制效果和抗干擾能力。
關鍵詞:欠驅動自主水下機器人;三維路徑跟蹤;干擾觀測器;反步滑模控制
中圖分類號:TP242.2文獻標志碼:A文章編號:1671-5276(2024)03-0209-06
Sliding Model Tracking Control for AUV Three Dimensional Path Based on Disturbance Observer
Abstract:In order to ensure that the underactuated autonomous underwater vehicle (AUV) can still track and control the 3D path in the case of external interference, a backstepping sliding mode controller based on disturbance observer is designed. According to the 5-DOF state equation of underactuated AUV, an interference observer is designed to estimate the interference in real time considering the influence of external interference on the motion of AUV. The stabilization model of the system is obtained through the state equation of the underactuated AUV and the 3D path tracking error model. A backstepping sliding mode composite controller is designed to control the AUV and realize the 3D path tracking. The closed-loop system is proved to be asymptotically stable by Lyapunov stability theory. The simulation results show that the controller has good control effect and anti-interference ability for the accurate tracking of 3D path of underactuated AUV.
Keywords:underactuated autonomous underwater vehicle; 3D path tracking; nonlinear disturbance observer; backstepping sliding mode control
0 引言
自主水下機器人(AUV)由于具有較高的機動性和系統可靠性,在實現海洋科學調查、水下勘探和海洋目標探查中起到重要作用[1]。AUV的路徑跟蹤控制是實現以上任務的保障。但由于AUV在復雜的海下環境作業時易受風、浪等干擾的影響[2],因此提高AUV在路徑跟蹤過程中的抗干擾能力有重要意義。
近年來,AUV的路徑跟蹤問題已引起學者們廣泛關注。文獻[3]針對AUV水平面模型,基于視線導引法建立跟蹤誤差模型,在控制器設計中結合模型預測算法,提高了AUV在水平面軌跡跟蹤的精度。文獻[4]針對AUV水平面模型受到干擾的情況,設計了基于干擾觀測器的滑模控制器,補償外界干擾帶來的影響,提高了AUV在水平面的跟蹤性能。文獻[5]對于欠驅動AUV受到干擾以及模型不確定性情況下的水平面路徑跟蹤問題,設計了基于自適應反步控制算法與模糊控制算法結合的控制器,提高系統的抗干擾能力。針對AUV在垂直面的路徑跟蹤問題,文獻[6]將Lyapunov直接法與反步法結合設計控制器,使AUV以期望的合成速度跟蹤預定的深度路徑。文獻[7]設計了靜態輸出反饋控制器來提高AUV在垂直面的跟蹤精度。上述文獻只研究了AUV在水平面或垂直面的路徑跟蹤問題。文獻[8]通過運用“虛擬向導”法建立三維路徑跟蹤誤差模型,采用濾波反步算法,解決了AUV三維路徑跟蹤控制問題。文獻[9]使用反步法設計了具有非線性動態特性的控制器,并應用到欠驅動AUV的三維軌跡跟蹤控制上,提高了AUV三維路徑的跟蹤性能。文獻[10]針對欠驅動AUV 6自由度模型受到不確定性影響,在控制器設計中將對角回歸神經網絡與S面控制算法結合,提高了跟蹤的精度。以上文獻均未考慮AUV受到外界干擾情況下的三維路徑跟蹤問題。
本文針對欠驅動AUV 5自由度模型受到干擾影響下的三維路徑跟蹤問題,設計了基于干擾觀測器的反步滑模控制器(DOBSMC),實現欠驅動AUV的三維路徑跟蹤控制。
1 欠驅動AUV數學模型
通過定義固定坐標系{I}:E-ξηζ和剛體坐標系{B}:O-xyz來描述欠驅動AUV的運動,如圖1所示。圖中θ為縱搖角與ψ為艏搖角代表姿態向量。
忽略AUV的橫滾運動,建立欠驅動AUV五自由度運動學及動力學模型[11]:
式中:V=[uvwqr]T為定義在坐標系{B}中的速度向量和角速度向量,其中u為縱蕩速度,v為橫蕩速度,w為垂蕩速度,q為縱搖角速度,r為艏搖角速度;η=[xyzθψ]T是AUV定義在坐標系{I}中的位置向量和姿態向量,x、y、z為AUV位置向量;B代表質量及慣性矩陣;C(V)代表科氏向心力矩陣;D(V)代表流體阻尼矩陣;g(η)=[000MHS0]T為重力和浮力產生的恢復力矩向量;J(η)為坐標系{I}與坐標系{B}之間的轉換矩陣;τ為AUV的驅動力和力矩;d為AUV所受到的外界干擾。將式(1)中的動力學模型展開可以得到:
2 干擾觀測器的設計
定義狀態變量x=x1x2x3x4x5T,其中:x1=u,x2=v,x3=w,x4=q,x5=r。
把狀態方程(2)改寫成向量形式:
構造干擾觀測器如下:
定義觀測誤差:
3 DOBSMC設計
3.1 三維路徑跟蹤誤差模型
式中:Δξ=ξk+1-ξk;Δη=ηk+1-ηk;Δζ=ζk+1-ζk。
基于參考文獻[12]得到跟蹤誤差模型:定義P0=[ξ0η0ζ0θψ]是O在坐標系{I}的位置和姿態,PP=[ξkηkζkθFψF]是P在坐標系{I}的位置和姿態。在坐標系{F}中的跟蹤誤差為:
Pe=[xeyezeθeψe]=R(P0-PP)
式中R是坐標系{I}到坐標系{F}的轉換矩陣,
對跟蹤誤差Pe求導有:
3.2 三維路徑跟蹤控制器設計
因AUV無垂向力與橫向力,故v與w很小,可忽略不計。又由于xe不需要進行控制,所以結合式(2)和式(9)得到以下欠驅動AUV鎮定模型[13]:
式中:ud為期望縱蕩速度;ue為縱蕩速度誤差。
取Lyapunov函數
對V1求導有
設計艏搖角誤差期望值ψed和縱搖角誤差期望值θed為
式中:k1gt;0;k2gt;0。
令ψe=ψed,θe=θed,可得
取Lyapunov函數
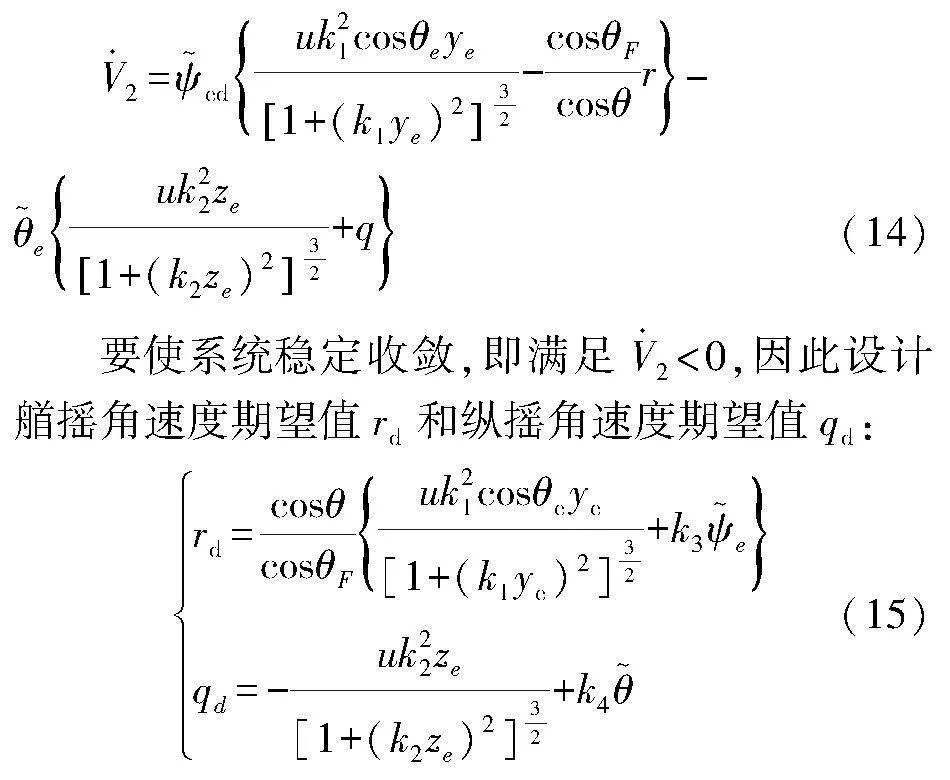
對V2求導可得
式中:k3gt;0;k4gt;0。
取滑模函數:
式中:c1gt;0;c2gt;0;c3gt;0。
取Lyapunov函數
對V3求導有
設計控制器為:
式中k5、k6、k7、k8、s1、s2、s3均大于0。
根據干擾觀測器設計部分推導,干擾估計誤差可以收斂到0,所以可以得到:
因此
4 仿真實驗
為驗證本文所提出控制器的有效性,在Matlab2019a Simulink 中基于文獻[14]中AUV模型進行數值仿真,具體參數如下:
干擾觀測器參數選取為:T1=1,T2=0,T3=0,T4=1,T5=1。
期望縱蕩速度ud為1m/s。
控制器參數選取為:
k1=0.2,k2=0.1,k3=1.0,k4=1.0,k5=10,c1=0.1,c2=0.1,c3=0.1,k6=1.0,k7=1.0,k8=10,ε1=0.1,ε2=0.1,ε3=0.1。
初始位姿向量:P0=(0000-0.5π)T。
所受外界干擾為:du=25,dv=dw=0,
dq=10sin(0.1t),dr=5sin(0.25t)+10。
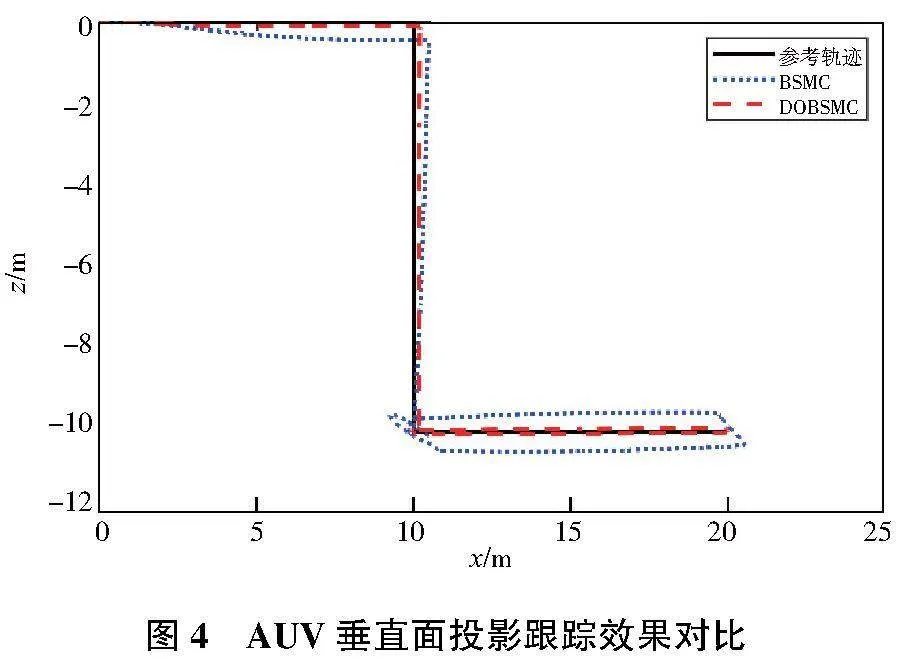
圖2是采用傳統反步滑模控制器(BSMC)與本文所設計的DOBSMC作用下的欠驅動AUV跟蹤路徑與期望路徑的對比圖。圖3和圖4是AUV三維路徑分別在水平面投影與垂直面投影的跟蹤效果對比。當要求AUV實現三維路徑跟蹤任務時,跟蹤路徑與期望路徑越相近,說明跟蹤效果越好。從圖中明顯可以看出,BSMC的跟蹤路徑與期望路徑的偏差較大,而采用DOBSMC的跟蹤效果較好。
圖5是DOBSMC作用下的y方向與z方向上的跟蹤誤差。從圖中可以看出誤差分別在25s、15s左右時達到了峰值0.075m、0.055m,之后誤差均穩定在0.05m范圍內。
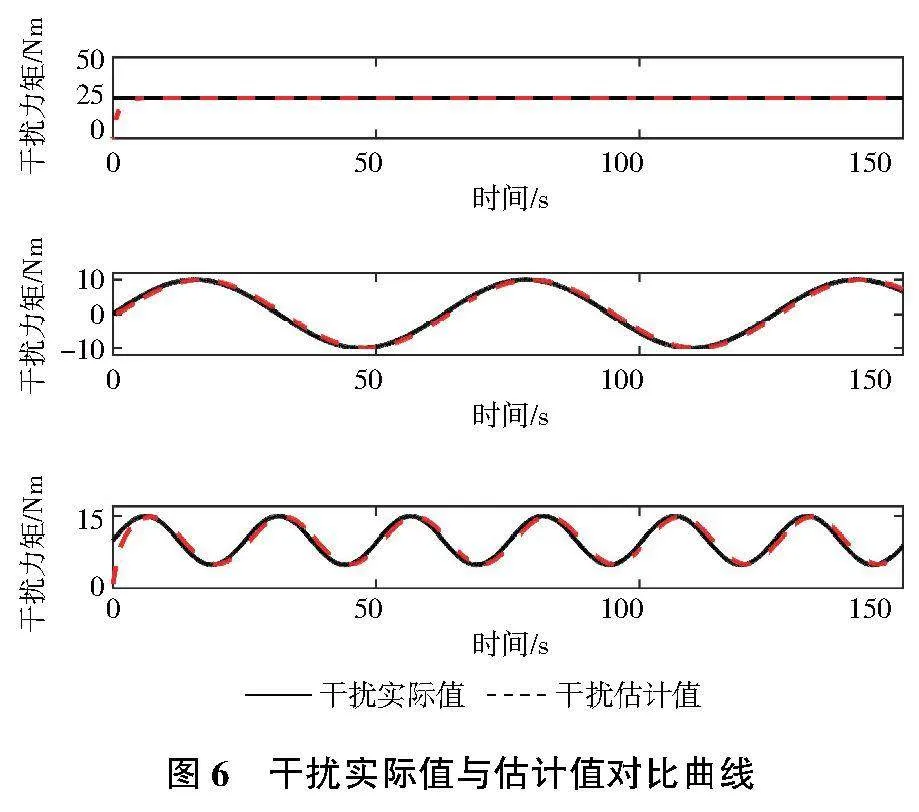
圖6為干擾實際值與干擾觀測器得到的估計值對比曲線。由圖可知,干擾觀測器可以實現對外界干擾的估計。
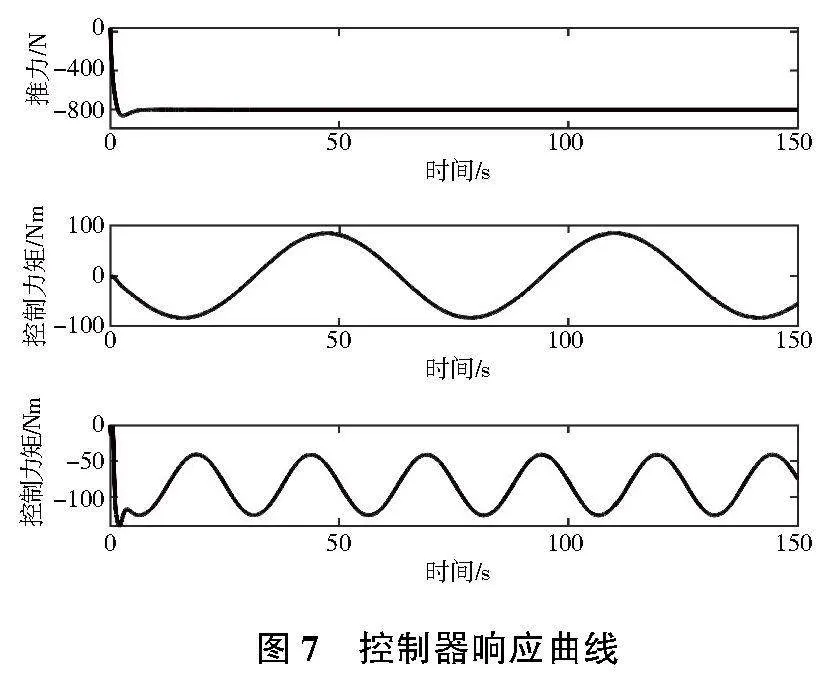
圖7是軸向推力X、縱搖控制力矩M以及艏搖控制力矩N的響應曲線。
圖8是縱蕩速度u的響應曲線,通過對式(2)的分析,縱蕩速度只與軸向推力X有關,軸向推力X直接決定了縱蕩速度u的大小。仿真結果顯示,當軸向推力X穩定在800N后,在其控制下縱蕩速度u最終收斂到期望值1m/s。
5 結語
通過對欠驅動AUV的5自由度模型與跟蹤誤差模型的簡化得到系統鎮定模型,考慮AUV受到干擾影響,設計了DOBSMC。仿真得到了AUV跟蹤的效果對比曲線以及位置跟蹤誤差曲線、干擾估計曲線、控制力矩和縱蕩速度的響應曲線。結果表明該控制器能夠提高AUV三維路徑的跟蹤精度,且能有效抑制外界干擾對系統性能造成的影響。
參考文獻:
[1] 王鵬. 欠驅動自主水下航行器的航跡跟蹤控制研究[D]. 秦皇島:燕山大學,2021.
[2] 王芳,萬磊,李曄,等. 欠驅動AUV的運動控制技術綜述[J]. 中國造船,2010,51(2):227-241.
[3] 郭亦平,王益民,任元洲. 基于視線導引法的AUV軌跡跟蹤控制技術研究[J]. 聲學與電子工程,2018(4):32-36,40.
[4] 李廣有,王娜,尹慶華. 欠驅動AUV基于干擾觀測器的滑模控制[J]. 機械制造與自動化,2022,51(2):177-180.
[5] 王金強,王聰,魏英杰,等. 未知海流干擾下自主水下航行器位置跟蹤控制策略研究[J]. 兵工學報,2019,40(3):588-591.
[6] YU C Y,XIANG X B. Vertical plane path following control of an under-actuated autonomous underwater vehicle[C]//2016 IEEE International Conference on Underwater System Technology:Theory and Applications (USYS). Penang,Malaysia:IEEE,2017:37-41.
[7] SUBUDHI B, MUKHERJEE K, GHOSH S. A static output feedback control design for path following of autonomous underwater vehicle in vertical plane[J]. Ocean Engineering,2013,63:72-76.
[8] 王宏健,陳子印,賈鶴鳴,等. 基于濾波反步法的欠驅動AUV三維路徑跟蹤控制[J]. 自動化學報,2015,41(3):631-645.
[9] LI Y, WEI C, WU Q, et al. Study of 3 dimension trajectory tracking of underactuated autonomous underwater vehicle[J]. Ocean Engineering,2015,105:270-274.
[10] 周則興. 基于DRNN-S控制的AUV三維軌跡跟蹤方法[J]. 艦船科學技術,2021,43(21):96-99,178.
[11] 金鴻章,姚緒梁. 船舶控制原理[M]. 2版. 哈爾濱:哈爾濱工程大學出版社,2013.
[12] 姚緒梁,王曉偉,蔣曉剛,等. 海流干擾下的欠驅動AUV三維路徑跟蹤控制[J]. 哈爾濱工業大學學報,2019,51(3):37-45.
[13] 王曉偉,姚緒梁,夏志平,等. 欠驅動AUV三維直線路徑跟蹤控制[J]. 控制工程,2020,27(6):977-983.
[14] PRESTERO T . Verification of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle[D]. [S.I.]:Massachusetts Institute of Technology, 2001.
