磁懸浮軸承系統(tǒng)辨識(shí)與魯棒控制
2024-08-31 00:00:00王藝宇周瑾徐園平周揚(yáng)張一博
機(jī)械制造與自動(dòng)化 2024年3期




















摘 要:為解決傳統(tǒng)魯棒控制器設(shè)計(jì)中存在的磁懸浮軸承被控模型建模復(fù)雜且難以準(zhǔn)確建模的問(wèn)題,運(yùn)用正交多項(xiàng)式擬合方法,對(duì)模態(tài)實(shí)驗(yàn)測(cè)得轉(zhuǎn)子的剛體模態(tài)及彎曲模態(tài)頻響數(shù)據(jù)進(jìn)行系統(tǒng)辨識(shí),建立磁懸浮軸承轉(zhuǎn)子系統(tǒng)被控模型;基于系統(tǒng)辨識(shí)所建立的磁懸浮軸承被控模型進(jìn)行H∞魯棒控制器設(shè)計(jì)。實(shí)驗(yàn)結(jié)果證明:基于系統(tǒng)辨識(shí)模型的魯棒控制器能夠?qū)崿F(xiàn)轉(zhuǎn)子的穩(wěn)定懸浮及對(duì)轉(zhuǎn)子剛體模態(tài)的控制。
關(guān)鍵詞:磁懸浮軸承;魯棒控制;系統(tǒng)辨識(shí)
中圖分類號(hào):TH133.3文獻(xiàn)標(biāo)志碼:A文章編號(hào):1671-5276(2024)03-0204-05
System Identification and Robust Control of Magnetic Suspension Bearing
Abstract:Regarding the complexity and dificulty in accurate modeling of magnetic suspension bearing rotor in the design of traditional robust controllers, the orthogonal polynomial fitting method is applied to measure the rigid body mode and systematically identify frequency response data of bending mode of the rotor through the modal experiment, and the controlled model of the magnetic suspension bearing rotor system is established. An H∞ robust controller is designed based on the controlled model of the maglev bearing established by system identification. The experimental results prove that the robust controller based on the system identification model can realize the stable suspension of the rotor and control the rigid body mode of the rotor.
Keywords:magnetic suspension bearing; robust control; system identification
0 引言
磁懸浮軸承主要依靠電磁力對(duì)轉(zhuǎn)子進(jìn)行控制,使轉(zhuǎn)子懸浮在指定位置。磁懸浮軸承的振動(dòng)控制一直是研究的核心問(wèn)題之一。魯棒控制器由于其抗干擾能力強(qiáng),能夠保證系統(tǒng)參數(shù)在一定范圍內(nèi)攝動(dòng)均能實(shí)現(xiàn)穩(wěn)定等優(yōu)勢(shì),已經(jīng)在磁懸浮軸承轉(zhuǎn)子系統(tǒng)控制中得到了廣泛的應(yīng)用。
目前關(guān)于磁懸浮軸承魯棒控制器已經(jīng)做了一定研究,MUSHI等[1]針對(duì)壓縮器中轉(zhuǎn)子所受氣動(dòng)載荷的影響,設(shè)計(jì)了μ綜合魯棒控制器,有效抑制了系統(tǒng)中存在的擾動(dòng)。RAN等[2]分別設(shè)計(jì)了H∞及μ綜合魯棒控制器,實(shí)現(xiàn)了磁懸浮軸承系統(tǒng)的過(guò)臨界。
魯棒控制器的設(shè)計(jì)依賴于被控模型的建立。由于磁懸浮軸承系統(tǒng)復(fù)雜,很難快速地建立精準(zhǔn)被控模型。系統(tǒng)辨識(shí)為被控模型的快速搭建提供了可能性,同時(shí)辨識(shí)的模型在頻域具備更好的擬合性,因此可以基于系統(tǒng)辨識(shí)的被控模型建模快速設(shè)計(jì)魯棒控制器。VAZQUEZ等[3]對(duì)磁懸浮軸承轉(zhuǎn)子模型進(jìn)行了系統(tǒng)辨識(shí);孫喆等[4]通過(guò)磁懸浮軸承掃頻激勵(lì),提出了一種柔性轉(zhuǎn)子模型測(cè)試與辨識(shí)的方法。
本文采用正交多項(xiàng)式擬合法對(duì)磁懸浮軸承轉(zhuǎn)子系統(tǒng)進(jìn)行頻響辨識(shí),選取合適的頻段辨識(shí)系統(tǒng)模態(tài)參數(shù),從而得到所需的被控模型;基于所辨識(shí)的被控模型進(jìn)行H∞魯棒控制器設(shè)計(jì),最終通過(guò)實(shí)驗(yàn)驗(yàn)證了所設(shè)計(jì)控制器的有效性。
1 系統(tǒng)模型辨識(shí)
1.1 正交多項(xiàng)式擬合原理
對(duì)于圖1所示的多自由度系統(tǒng),其節(jié)點(diǎn)與節(jié)點(diǎn)之間存在一定的頻響關(guān)系[5],可以寫成如下有理分式多項(xiàng)式。
式中:分母階次n=2N;分子階次m=n-2。此時(shí)分子分母多項(xiàng)式可以分別表達(dá)為
將式(1)分子、分母同除bn,在擬合過(guò)程中引入負(fù)頻率[6],滿足H(jω-i)=H(-jωi)=H*(jωi)。
將式(1)左右同乘分母多項(xiàng)式并基于最小二乘法將其線性化,得到擬合方程為
式中:X=-Re(PHQ); Y=0.5(PHP+PTP*); Z=0.5(QHQ+QTQ*); G=Re(PHW); F=Re(QHW); C=(a0,a1,…,am)T; D=(b0,b1,…,bn-1)T;
將冪基多項(xiàng)式轉(zhuǎn)化為Forsythe復(fù)正交多項(xiàng)式,其表達(dá)式形式如下:
1.2 轉(zhuǎn)子系統(tǒng)擬合
基于上文所述的有理多項(xiàng)式擬合方法[7],本節(jié)開(kāi)展磁懸浮軸承轉(zhuǎn)子系統(tǒng)的擬合。通過(guò)模態(tài)敲擊實(shí)驗(yàn)可以得到轉(zhuǎn)子所需兩節(jié)點(diǎn)之間的頻響數(shù)據(jù),基于此類數(shù)據(jù),進(jìn)一步開(kāi)展被控模型辨識(shí),并以此作為控制器設(shè)計(jì)的基礎(chǔ)。
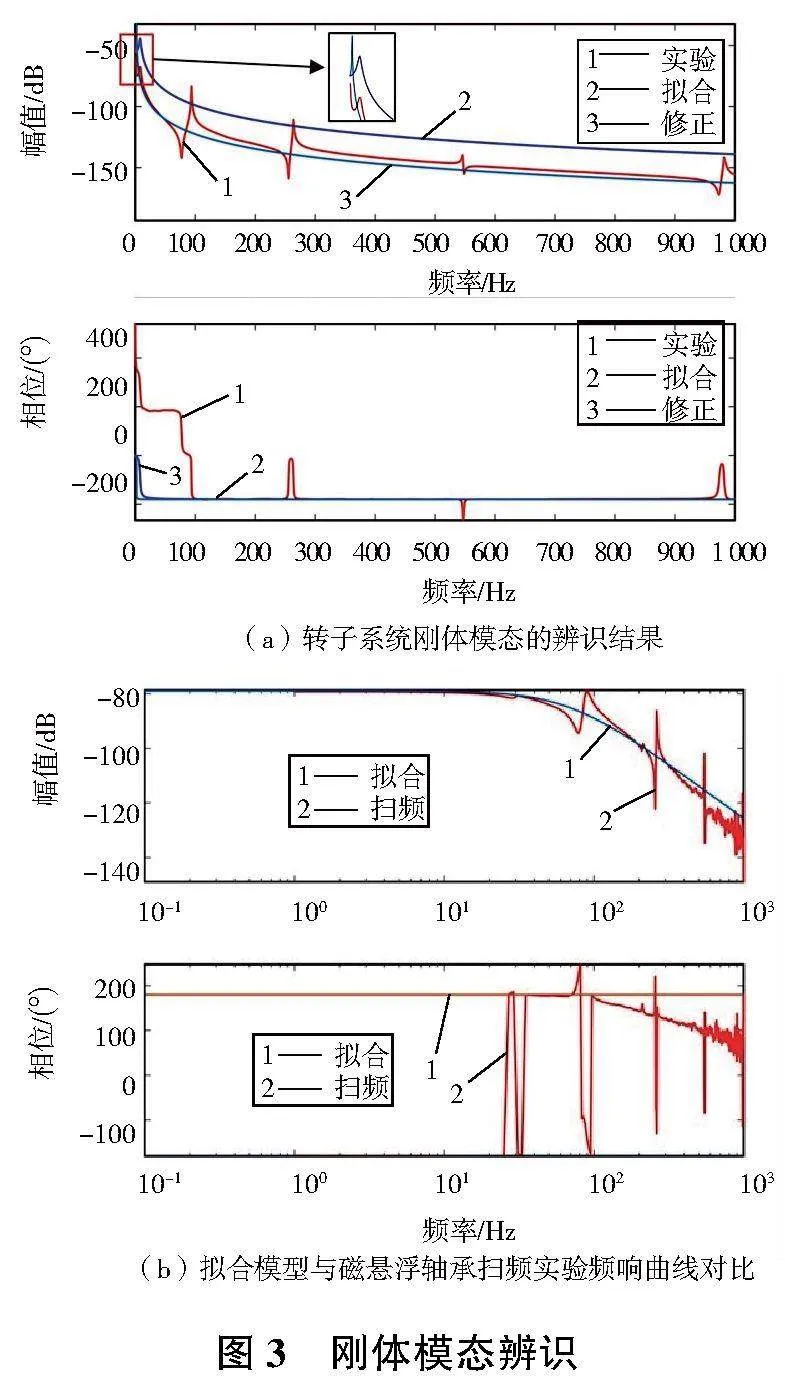
圖2為轉(zhuǎn)子系統(tǒng)測(cè)得位移頻響數(shù)據(jù),擬合一階模態(tài)需采用二階傳遞函數(shù)。在控制器被控模型設(shè)計(jì)中,首先需要擬合的為轉(zhuǎn)子的剛體模態(tài),此時(shí)選取頻段0~30Hz進(jìn)行模型擬合,其擬合曲線如圖3所示。
通過(guò)圖3(a)局部放大可以看出,由于模態(tài)敲擊實(shí)驗(yàn)中很難做到自由—自由態(tài),因此存在一定的支承剛度,剛體模態(tài)頻率不為0。此時(shí)由于擬合曲線僅由剛體模態(tài)決定,所擬合的頻響模型與實(shí)驗(yàn)頻響曲線幅值存在一定差距,但總體趨勢(shì)保持一致。為了保證辨識(shí)模型的準(zhǔn)確,對(duì)此模型進(jìn)行修正,使其剛體模態(tài)頻率接近0。圖中3曲線為修正后模型的頻響曲線,其傳遞函數(shù)如下:
從式(5)可得剛體模態(tài)頻率為2Hz,從圖3中可以看出其擬合性得到了明顯的改善。將所辨識(shí)的轉(zhuǎn)子模型代入磁懸浮軸承轉(zhuǎn)子系統(tǒng)模型中,由圖3(b)可以看出,辨識(shí)被控模型曲線與掃頻實(shí)驗(yàn)頻響曲線具有較好的擬合性。
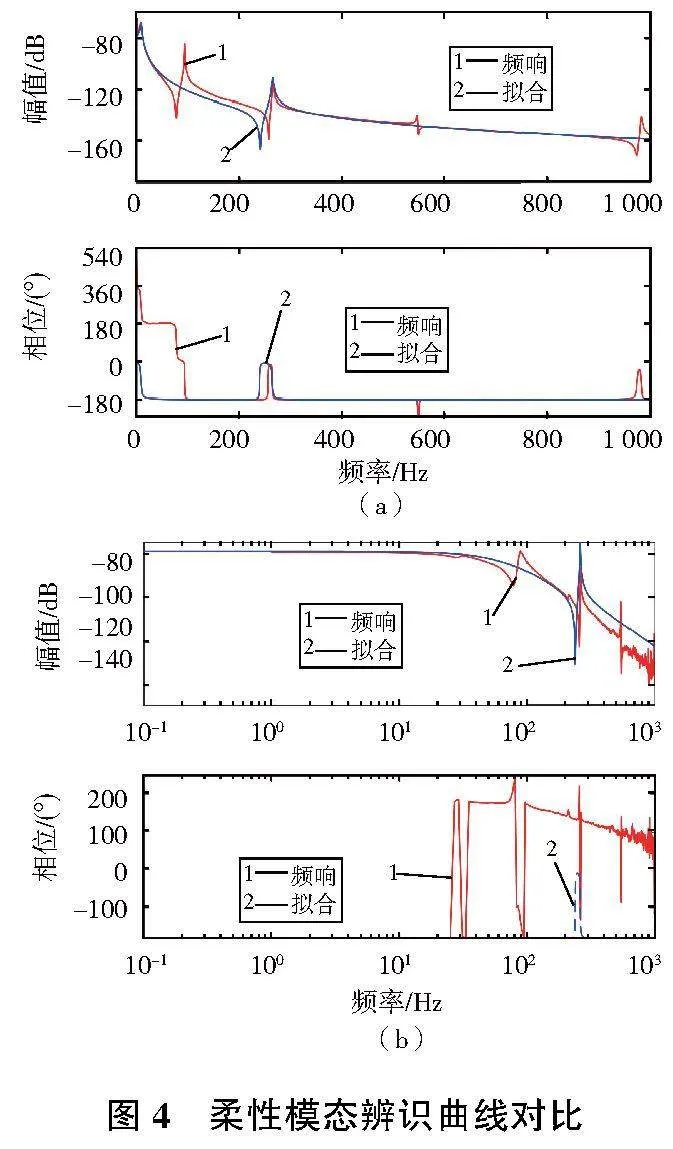
為了驗(yàn)證系統(tǒng)擬合方法對(duì)磁懸浮軸承轉(zhuǎn)子系統(tǒng)彎曲模態(tài)辨識(shí)的有效性,選取3~30Hz、246~400Hz,辨識(shí)轉(zhuǎn)子的剛體模態(tài)及二階彎曲模態(tài),選用四階傳遞函數(shù)進(jìn)行擬合,其擬合傳遞函數(shù)如下:
柔性模態(tài)辨識(shí)曲線對(duì)比如圖4所示,此時(shí)辨識(shí)被控模型曲線與實(shí)驗(yàn)測(cè)得頻響函數(shù)擬合性較好。傳遞函數(shù)由剛體模態(tài)及二階彎曲模態(tài)疊加而成,因此未出現(xiàn)前文所述的剛體模態(tài)頻率不為0導(dǎo)致的擬合不準(zhǔn)確問(wèn)題。通過(guò)上述擬合實(shí)驗(yàn)驗(yàn)證了系統(tǒng)擬合的可行性與有效性。
2 控制器設(shè)計(jì)與仿真
2.1 魯棒控制器理論
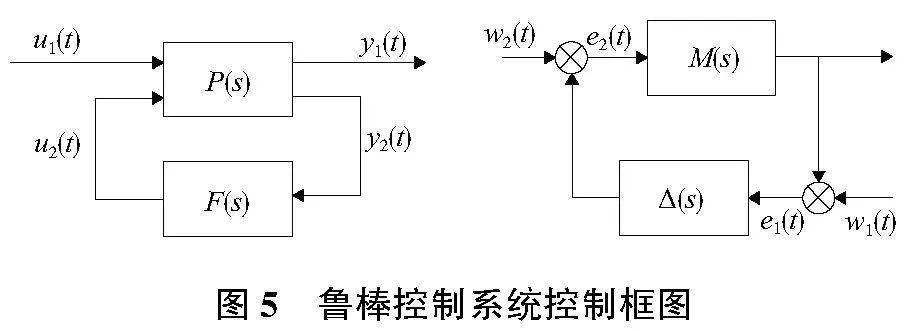
魯棒控制系統(tǒng)的結(jié)構(gòu)如圖5所示,P(s)為被控對(duì)象,F(xiàn)(s)為控制器模型;e1(t)、e2(t)為系統(tǒng)傳遞中的中間變量。輸入u1(t)到輸出y1(t)的傳遞函數(shù)可以表示為Ty1u1。小增益定理如圖所示[8],M(s)為線性控制系統(tǒng),Δ(s)為一未知增益函數(shù),當(dāng)且僅當(dāng)小增益條件
M(jω)Δ(jω)<1,ω∈R(7)
滿足時(shí),系統(tǒng)對(duì)于所示系統(tǒng)對(duì)穩(wěn)定的Δ(s)都是內(nèi)部穩(wěn)定的。外部干擾信號(hào)會(huì)在環(huán)路中逐漸衰減掉以實(shí)現(xiàn)內(nèi)部穩(wěn)定。
混合靈敏度問(wèn)題是H∞魯棒控制器設(shè)計(jì)中常用的設(shè)計(jì)方法,其將系統(tǒng)的魯棒性問(wèn)題及跟蹤性能問(wèn)題轉(zhuǎn)化為一般靈敏度問(wèn)題進(jìn)行求解,其設(shè)計(jì)原理如圖6所示。
圖6中rec、e、u、d、y和z分別為參考輸入、跟蹤誤差、控制信號(hào)、干擾信號(hào)、輸出信號(hào)、觀測(cè)信號(hào)。W1、W3分別為需要設(shè)計(jì)的靈敏度、補(bǔ)靈敏度加權(quán)函數(shù),W2為加性不確定性加權(quán)函數(shù)。
靈敏度函數(shù)S(s)表達(dá)式如下:
其反映了系統(tǒng)追蹤信號(hào)的能力及對(duì)擾動(dòng)的一致能力,一般要求其在低頻段增益越小越好。
補(bǔ)靈敏度函數(shù)T(s)表達(dá)式如下:
其反映了系統(tǒng)對(duì)高頻不確定性擾動(dòng)的抑制能力,一般要求其在高頻段增益越小越好。
其可避免控制電壓的飽和,同時(shí)又影響控制系統(tǒng)的帶寬,因此其增益應(yīng)適當(dāng)選擇既不能過(guò)大又不能過(guò)小。根據(jù)魯棒控制定理,在加權(quán)函數(shù)的設(shè)計(jì)過(guò)程中需滿足:
2.2 魯棒控制器設(shè)計(jì)與仿真
根據(jù)上文設(shè)計(jì)加權(quán)函數(shù)可得:
將上述加權(quán)函數(shù)代入混合靈敏度框圖,得到廣義被控模型P(s)并求解魯棒控制器模型:
式(15)為基于剛體模態(tài)辨識(shí)模型式(5)設(shè)計(jì)的H∞控制器模型,式(16)為基于剛性模態(tài)及柔性模態(tài)式(6)設(shè)計(jì)的H∞魯棒控制器模型。下面以式(15)分析H∞魯棒控制器性能。
由圖7可知所設(shè)計(jì)的魯棒控制器在低頻段呈現(xiàn)了積分效應(yīng),在中頻段呈現(xiàn)了類似PD控制器的頻響特性。
3 實(shí)驗(yàn)
對(duì)所設(shè)計(jì)的H∞魯棒控制器進(jìn)行靜態(tài)懸浮實(shí)驗(yàn),以剛體模態(tài)控制器為例,其效果如圖8所示。
由圖8可知,轉(zhuǎn)子超調(diào)量較小,在1.0s內(nèi)便完成了轉(zhuǎn)子的靜態(tài)懸浮,具有較好的起浮特性。
圖9為磁懸浮軸承實(shí)驗(yàn)臺(tái)添加1~150Hz一系列正弦激勵(lì)的響應(yīng)瀑布圖。從圖中可以看出,在轉(zhuǎn)子系統(tǒng)剛體模態(tài)處,幅值出現(xiàn)了峰值,其振動(dòng)幅值較小,體現(xiàn)了H∞魯棒控制器對(duì)轉(zhuǎn)子系統(tǒng)剛體模態(tài)的控制效果。
4 結(jié)語(yǔ)
本文基于正交多項(xiàng)式擬合原理對(duì)轉(zhuǎn)子系統(tǒng)剛體模態(tài)及彎曲模態(tài)進(jìn)行了系統(tǒng)頻響辨識(shí),建立了磁懸浮軸承系統(tǒng)被控模型,通過(guò)磁懸浮軸承掃頻實(shí)驗(yàn)驗(yàn)證了通過(guò)擬合模型的準(zhǔn)確性。隨后基于混合靈敏度魯棒控制器設(shè)計(jì)方法,對(duì)辨識(shí)的系統(tǒng)被控模型進(jìn)行H∞魯棒控制器設(shè)計(jì)。實(shí)驗(yàn)結(jié)果表明,基于系統(tǒng)辨識(shí)的魯棒控制器應(yīng)用于磁懸浮軸承系統(tǒng)中,具備較好的起浮特性及對(duì)剛體模態(tài)的控制效果,驗(yàn)證了基于模型辨識(shí)的魯棒控制器設(shè)計(jì)的有效性及可行性。
參考文獻(xiàn):
[1] MUSHI S E, LIN Z L, PAUL E. Stability analysis for a flexible rotor on active magnetic bearings subject to aerodynamic loads [C]// Proceeding of the 12th International Symposium on Magnetic Bearings. [S.I.: s.n.]2010: 22-25.
[2] RAN S L,HU Y F,WU H C. Design,modeling,and robust control of the flexible rotor to pass the first bending critical speed with active magnetic bearing[J]. Advances in Mechanical Engineering,2018,10(2):168781401875753.
[3] VAZQUEZ J A,MASLEN E H,AHN H J,et al. Model identification of a rotor with magnetic bearings[J]. Journal of Engineering for Gas Turbines and Power,2003,125(1):149-155.
[4] 孫喆,趙晶晶,時(shí)振剛. 電磁軸承支承柔性轉(zhuǎn)子模型測(cè)試與辨識(shí)[J]. 機(jī)械工程學(xué)報(bào),2016,52(8):16-22.
[5] 傅志方,華宏星. 模態(tài)分析理論與應(yīng)用[M]. 上海:上海交通大學(xué)出版社,2000.
[6] 陳穎,陳懷海. 一種二自由度系統(tǒng)物理參數(shù)識(shí)別方法[C]// 第十屆全國(guó)振動(dòng)理論及應(yīng)用學(xué)術(shù)會(huì)議. 南京:中國(guó)振動(dòng)工程學(xué)會(huì),2011:207-213.
[7] 王彤,張令彌. 有理分式正交多項(xiàng)式頻響函數(shù)模態(tài)參數(shù)識(shí)別[J]. 航空學(xué)報(bào),2003,24(2):140-143.
[8] 周衡,金超武. 基于H∞和干擾觀測(cè)器的磁懸浮軸承干擾抑制方法[J]. 機(jī)械制造與自動(dòng)化,2022,51(3):149-151,158.
