自動駕駛仿真測試場景庫體系建設方法綜述
2024-08-28 00:00:00廖瑗褚觀耀程前
機械制造與自動化 2024年4期
關鍵詞:綜述

摘 要:基于自動駕駛仿真測試場景庫可以有效加速測試進度,提高測試的安全性和覆蓋度。對自動駕駛中的場景進行分析,論述了相關的場景定義、場景元素以及場景來源;對場景中的數據處理、特征提取、場景聚類進行描述,總結提出自動駕駛測試仿真場景庫的體系搭建方法,并對未來發展趨勢作了相關預期分析,可以為自動駕駛測試開發提供參考和借鑒。
關鍵詞:自動駕駛;仿真測試;場景庫體系;綜述
中圖分類號:U461.91 文獻標志碼:A 文章編號:1671-5276(2024)04-0271-05
Summary of Construction Method of Scene Library System Based on Automatic Driving Simulation Test
LIAO Yuan,CHU Guanyao,CHENG Qian
(China Automotive Engineering Research Institute Co., Ltd., Chongqing 401122, China)
Abstract:Since scene library based on automatic driving simulation test can effectively accelerate the test progress and improve the safety and coverage of the test, this paper analyzes the scene in automatic driving, discusses the relevant scene definition, scene elements and scene sources, describes the data processing, feature extraction and scene clustering in the scene, summarizes and proposes the system construction method of the simulation scene library of automatic driving test, and looks forward the trend of future development, which can be reference and lesson for the development of automatic driving test.
Keywords:autonomous driving; simulation test; scene library system; summarize
0 引言
自動駕駛技術發展日益精進,但其商業化落地需要經過大量的測試驗證。傳統的測試方法主要是利用搭載自動駕駛功能的實車進行道路測試。這種模式時間久、成本高、測試覆蓋度低,并且受到較多的限制,無法進行極端邊界方面的測試[1]。由此可見,單純依靠實車測試具有較大的局限性,不利于快速驗證自動駕駛功能的可靠性。針對實車測試的不足之處,仿真測試可以在實車測試之前進行大量的虛擬測試,有效加速自動駕駛技術開發,這使得仿真測試技術日益受到業界的關注和重視,國內外科技公司、車企和高校均積極開展仿真測試場景方面的研究[2]。
從目前仿真測試發展趨勢來看,仿真測試逐漸向以下幾個方面發展。1)基于云平臺的高并發測試、加速測試。云平臺具備海量數據存儲、處理和管理的能力,支持大規模仿真構建,覆蓋海量駕駛場景;可有效建立城市級地理信息+虛擬交通流信息,可實現跨專業多用戶信息交互與共享。2)功能安全場景庫、V2X場景庫以及預期功能安全場景庫成為場景庫建設的重點內容。3)不同廠商采用統一數據格式標準,共建基礎場景庫,形成通用的、可移植的模式。4)隨著車輛網聯化程度持續滲透,信息安全方向的驗證測試與評價也必然是自動駕駛仿真測試的一個重要模塊。
自動駕駛場景中人-車-路-環境之間的相互作用可以從時間、空間的維度來分析,這是一個復雜的動態關系模型,而基于這種關系模型形成的場景集是自動駕駛仿真測試開發的基礎。但是,現實世界中的場景具有無限豐富、極其復雜、不可預測等特點,在虛擬環境中要完全復現這些場景是十分困難的。如何利用有限的測試場景去映射出無限豐富的世界是實現自動駕駛測試驗證的關鍵。基于場景庫的仿真測試是目前解決自動駕駛路測數據匱乏的重要路線。場景庫中的測試場景對現實世界的覆蓋率越高,仿真測試結果的準確性就越高。
為了解決傳統道路測試的一系列局限性問題,本文基于國內外自動駕駛仿真測試研究狀況,在第1節中針對場景作為自動駕駛仿真測試場景庫的主體進行了多維度的描述,介紹了場景定義、場景元素以及場景的數據來源等內容;在第2節中梳理了常見的數據處理方式,包括數據預處理、場景特征提取、場景聚類分析等;在第3節中總結歸納了自動駕駛仿真測試場景庫體系的搭建方法、分布式架構以及基于場景的V字開發模型;在第4節中針對目前自動駕駛仿真測試場景庫的開發提出了研究方向及展望。
1 自動駕駛仿真測試場景
1.1 場景定義
目前在自動駕駛領域場景的定義尚未統一,ULBRICH等[3]認為場景是按照時間序列進行發展的事件集合,全部場景均在同一個初始化時間序列的環境中進行。GO等[4]認為場景是由參與者、背景信息和行動或事件順序構成的時間序列,簡而言之,任何領域的場景要素都是一樣的,但是場景的使用卻大不相同。MENZEL 等[5]將自動駕駛場景分為3類,即功能場景、邏輯場景、具體場景。朱冰等[6]認為場景的本質是自動駕駛車輛在每個行駛時間戳與環境的動態組合。
上述研究中對場景的核心認知具有一致性,即場景包含測試車輛、其他交通參與者以及車輛環境,并且相互之間具有交互行為。由此可見,場景是時間序列中測試車輛和周圍環境各元素動態組合的描述,其具有無限豐富、難以預測、不可窮盡等特點。
1.2 場景元素
對于場景元素的內容和類型,各研究主體提出的定義也有所差異。SAUERBIER 等[7]認為場景元素包括測試車輛、交通環境元素、駕駛任務信息和特定駕駛行為。GEYER等[8]提出場景元素包括預定駕駛任務、靜態場景元素和動態場景元素。GROH等[9]將場景元素分為靜態元素、動態元素和環境元素。
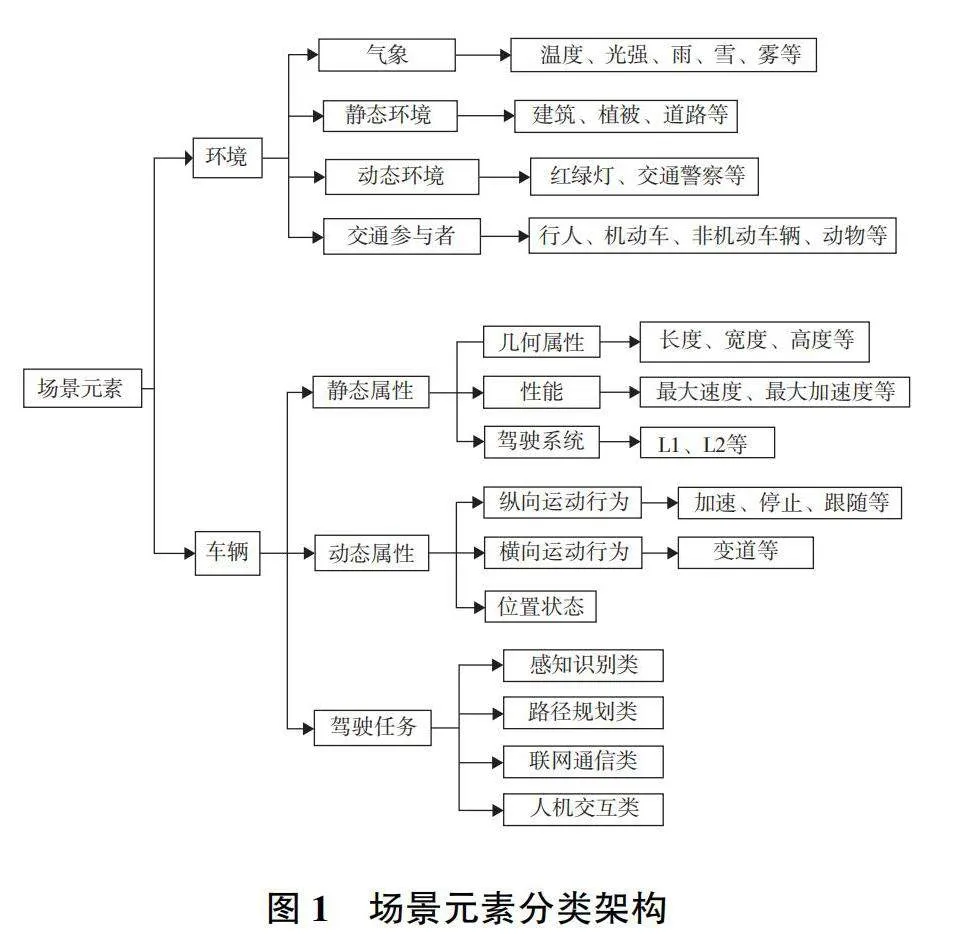
自動駕駛測試車輛在行駛過程中會對周圍場景元素產生影響,同樣,周圍場景元素也會反過來影響測試車輛,即車輛本身屬性對場景構成具有重大影響。對此,本文梳理了圖1所示的場景元素分類框架,將場景元素概括為兩大類:車輛和環境。其中,環境包括氣象、靜態環境、動態環境和交通參與者;車輛包括靜態屬性、動態屬性、駕駛任務。
1.3 場景數據來源
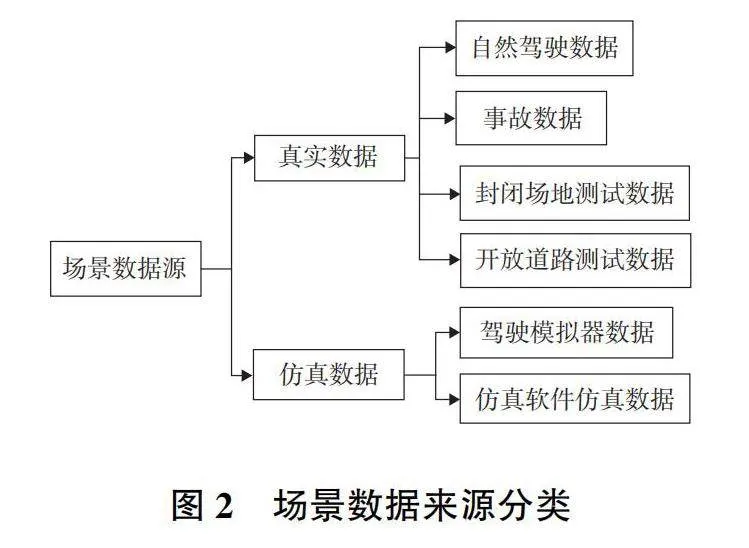
目前國內外已有部分機構收集了相關數據,形成了仿真測試場景庫。美國 NHTSA、德國KITTI、國內的騰訊TAD Sim、百度 Apollo 等都為自動駕駛測試開發了專門的場景數據收集系統,為仿真場景搭建提供數據支撐。仿真測試場景就數據來源來說,主要有真實數據和仿真數據[10],如圖2所示。
1)真實數據
自然駕駛數據、事故數據以及測試數據都可以作為真實數據來源。自然駕駛數據和事故數據作為真實數據的最常見形式,在研究中占有較大的比重。
自然駕駛數據一般是通過車載設備采集得到的[11],比如攝像頭、導航設備、雷達等傳感器在車輛正常行駛時采集數據。常見的自動駕駛數據采集環境包括城市道路、高速道路等。
事故數據一般是從國家交通事故中進行人為分析篩選得到的。目前許多國家和相關機構都形成了一些交通事故數據庫,比如美國國家公路交通安全管理局的GES數據庫、德國的GIDAS 深度事故數據庫、國內中汽技術研究中心的CIDAS事故數據庫。
2)仿真數據
仿真數據主要是指駕駛模擬器和軟件仿真形成的數據。
駕駛模擬器可以在仿真軟件中由真實測試人員駕駛來進行數據采集,既有安全性又能保證一定的真實性。仿真軟件則是人為設定駕駛任務,讓虛擬測試車輛在仿真環境下行駛,從而收集相關數據。仿真環境建立的核心是交通流建模和周圍靜態道路建模。
2 場景數據處理
要使用不同來源的數據進行仿真場景庫建設的前提就是進行數據處理,場景數據處理的關鍵是提取體現目標場景的特征元素。
德國PEGASUS項目中形成了自動駕駛場景仿真數據處理的完整流程[12]:數據生成—數據格式檢查—信息標注—場景關聯度分析—場景發生概率分析—數字化聚類分析—生成測試場景。
百度Apollo對場景聚類方法進行分析,提出了場景數據清洗、場景元素分析、數字化聚類等操作[13]。基于國內外對自動駕駛場景數據的處理方法,可以得出數據處理過程主要包括數據預處理、特征提取、聚類分析。
2.1 數據預處理
不同數據來源的數據自然有格式、單位上的差異,并且原始數據也包括一些無效、錯位的數據。因此有必要對傳感器收集的數據進行清洗。
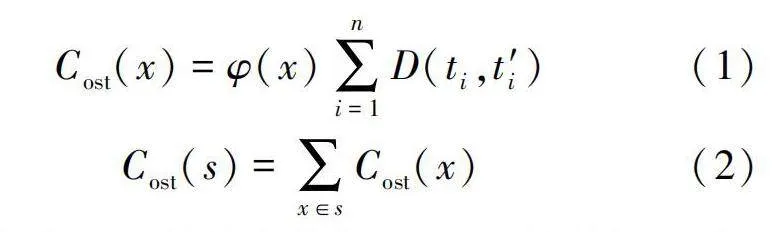
數據清洗主要是對冗余、缺失、異常的數據進行數據修復,目前的數據清洗一般是算法加人工輔助的方式,數據清洗應當在滿足數據要求質量的前提下盡可能降低清洗代價。設Cost(x)和Cost(s)分別表示單個數據元組和整個數據集的清洗代價,其數據表達式如下:
式中:x為分組后的單個數據元組;ti是數據要素;t′i是修復后數據要素;D是ti與t′i之間的距離;s是所有數據元組總和;φ(x)是x與全部數據元組總和的比。
2.2 特征提取
清洗后的數據要通過特征提取才能對場景進行解耦。文獻[14]基于特征變量的統計分布,選擇某些場景組成要素,比如道路類型、車速等。文獻[15]選擇光照、道路類型等特征要素。目前對場景特征元素的提取都是根據主觀需求來確定,缺乏客觀依據。文獻[16]根據事故場景選擇對事故有影響的要素進行多元 Logistics 回歸模型,其模型如下。
式中:Y表示事故場景的影響程度,其取值為i=1,2,3,…,A-1;α和β分別為回歸模型的截距和系數;X為影響事故程度的變量,N為變量X的數量。
2.3 聚類分析
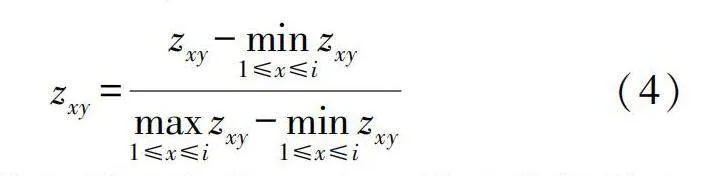
由于各個特征要素之間單位各不相同,因此在聚類分析前需要進行特征變量設置[17]。根據特征變量的表現形式可以進行靜態和動態處理,靜態處理用常量表示狀態,比如天氣的晴和雨可以分別用0和1表示;動態處理即元素狀態時刻發生改變,無法以常數表示,比如測試車速和目標速度采用極差標準化來處理,可以使得動態變量取值在0~1之間,標準化后的變量zxy的計算表達式如下[18]。
式中:i表示數據樣本數量;y表示單個數據樣本特征變量個數。
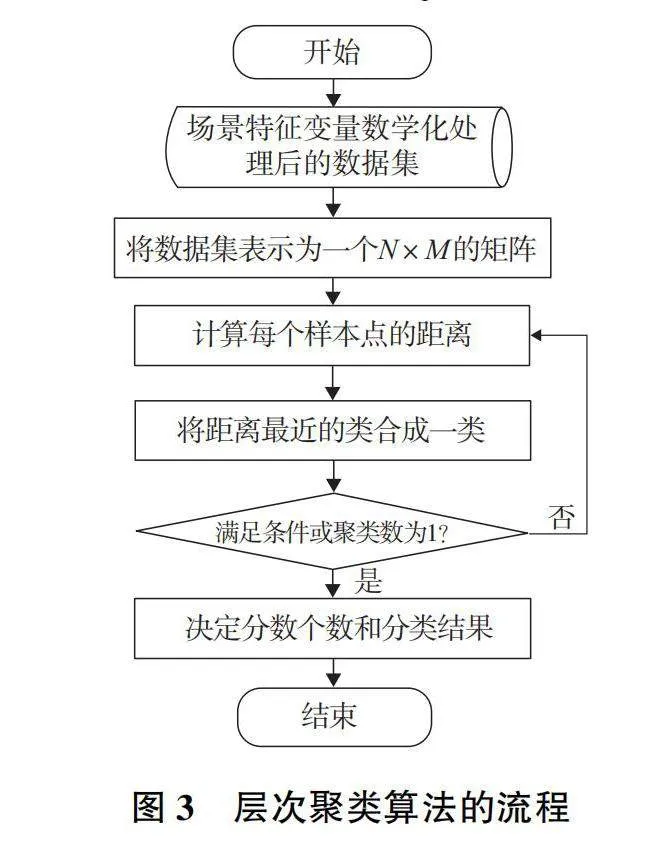
對場景特征進行數字化后進行聚類分析。聚類分析的核心就是將相似度較高的對象或者元素分為一類,相似度較低的元素進行拆分[19]。聚類算法的主要流程如圖3所示。
3 仿真場景庫建設
仿真場景庫建設應當滿足自動駕駛各個級別(L0—L5)測試需求[20],并符合以下要求。1)覆蓋面廣,包含自然駕駛場景、標準法規場景、功能安全場景、危險場景、參數重組場景等場景,最大程度覆蓋現實世界可能出現的駕駛場景。2)擴展性強,針對指定場景要素自動進行場景泛化處理,批量化生成測試用例。3)場景數量多,場景數量規模超過百萬級。4)兼容性好,支持各大主流仿真平臺和軟件。
3.1 場景庫體系搭建
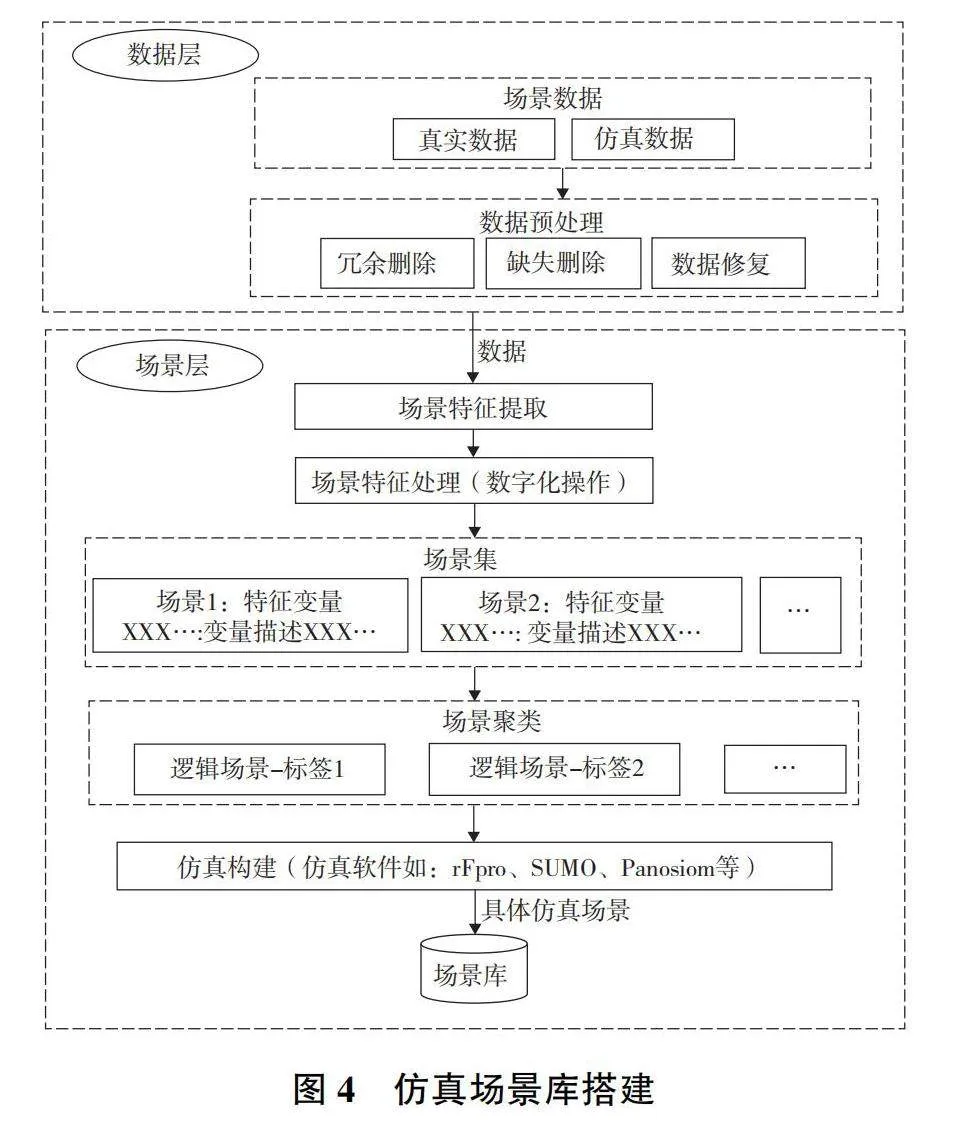
自動駕駛場景搭建流程如圖4所示,整個搭建過程由數據層貫穿到場景層[21]。
1)數據層通過實車測試、仿真軟件采集構建場景需要的數據源,然后對數據進行冗余、確實、異常等預處理操作,最后將數據格式和參數統一化。
2)場景層將接受到的數據層數據進行特征提取、數字化設置形成場景集,然后基于聚類處理形成多種邏輯場景,最后由仿真軟件構建大量的具體場景形成場景庫。
3.2 分布式架構
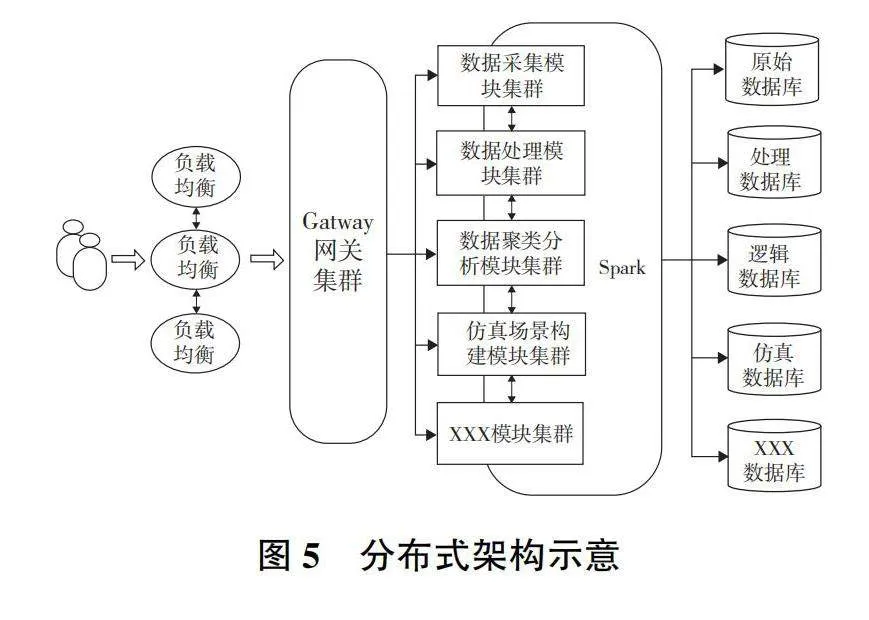
從數據—場景—場景庫的流程來看,整個數據系統要滿足數據處理、場景生成等要求[22],這些核心功能的實現需要依賴海量存儲和并行計算技術,單節點無法承擔海量數據和高性能并發的需求,需要將場景庫設計為多節點共分擔任務的架構。這就需要采用分布式架構,降低單個服務器的壓力,實現低時延、高可靠,其整體架構設計如圖5所示。
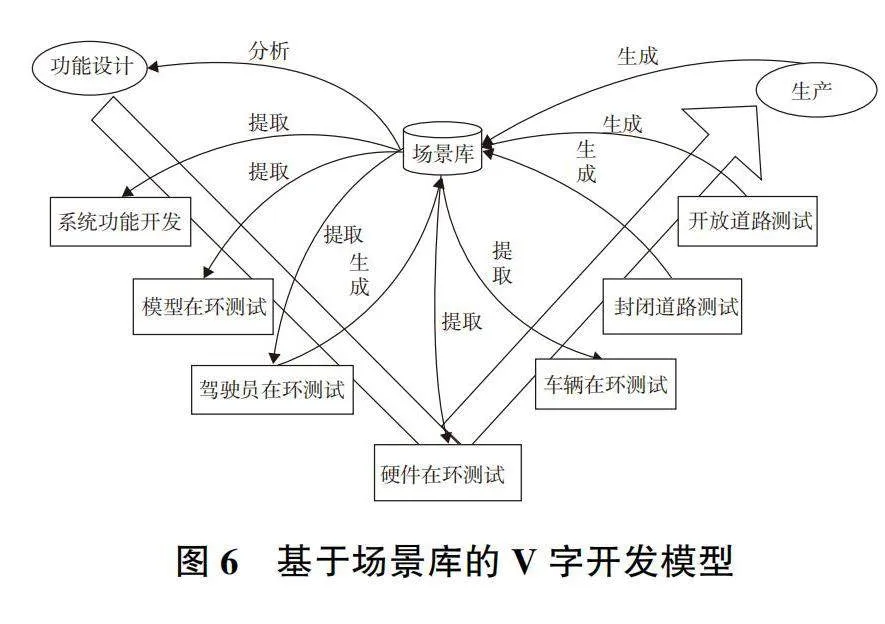
3.3 基于場景庫的V字開發模型
自動駕駛技術的演進使得測試場景變得無限豐富,在道路測試中無法做到全覆蓋,如圖6所示,基于場景庫的開發模型具有更好的優勢[23],其涵蓋虛擬測試和實車測試。虛擬測試包括模型在環測試(MIL)、駕駛員在環測試(DIL)、硬件在環測試(HIL)、車輛在環測試(VIL),實車測試包括封閉和開放道路測試[24]。
4 結論及其展望
面對自動駕駛技術的迭代演進,自動駕駛測試面臨諸多挑戰,開發仿真測試場景庫是自動駕駛商業化落地的有效基石。目前國內的研究人員也對仿真測試做了大量的研究,許多國內公司正在逐步開發并完善自動駕駛仿真測試場景庫,以期應對未來自動駕駛測試需求。從當前來看,仿真測試場景庫開發具有潛在的挖掘研究空間,可以從以下幾個方面著手。
1)開發國產仿真軟件。仿真技術是場景庫開發的重要環節,直接對仿真逼真度產生影響,但目前場景仿真技術難度大、成本較高,缺乏對中國典型場景的仿真測試,國外仿真軟件無法覆蓋中國道路場景特色,未來可以基于國內仿真需求,開發中國特色的仿真軟件。
2)覆蓋邊緣極限場景。目前對正常駕駛場景的仿真較為常見,可以滿足基本的測試需求,但由于邊界場景數據源缺乏且構建困難,邊緣極限場景豐富度尚有欠缺,而此類場景體現了整個仿真場景庫的完整度。需要針對此挑戰,以構建邊界場景為目標,衍生開發多種邊界場景。
3)提高場景生成和提取效率。由數據庫到場景庫的過程核心是實現場景庫的生成和測試過程的場景提取,由于場景生成過程較為復雜并且數據庫的規模龐大,導致其耗時久、效率低,為了進一步提高測試效率,未來可以借助分布式加速引擎開發,加速場景生成和提取過程。
參考文獻:
[1] 馬依寧,姜為,吳靖宇,等. 基于不同風格行駛模型的自動駕駛仿真測試自演繹場景研究[J]. 中國公路學報,2023,36(2):216-228.
[2] 李平飛,金思雨,胡文浩,等. 用于自動駕駛仿真測試的車—車事故場景復雜度評價[J]. 汽車安全與節能學報,2022,13(4):697-704
[3] ULBRICH S,MENZEL T,RESCHKA A,et al. Defining and substantiating the terms scene,situation,and scenario for automated driving[C]//2015 IEEE 18th International Conference on Intelligent Transportation Systems. Gran Canaria,Spain:IEEE,2015:982-988.
[4] GO K,CARROLL J M. The blind men and the elephant[J]. Interactions,2004,11(6):44-53.
[5] MENZEL T,BAGSCHIK G,MAURER M. Scenarios for development,test and validation of automated vehicles[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu,China:IEEE,2018:1821-1827.
[6] 朱冰,張培興,趙健,等. 基于場景的自動駕駛汽車虛擬測試研究進展[J]. 中國公路學報,2019,32(6):1-19.
[7] SAUERBIER J,BOCK J,WEBER H,et al. Definition of scenarios for safety validation of automated driving functions[J]. ATZ Worldwide,2019,121(1):42-45.
[8] GEYER S,BALTZER M,FRANZ B,et al. Concept and development of a unified ontology for generating test and use-case catalogues for assisted and automated vehicle guidance[J]. IET Intelligent Transport Systems,2014,8(3):183-189.
[9] GROH K,KUEHBECK T,FLEISCHMANN B,et al. Towards a scenario-based assessment method for highly automated driving functions[Z].[S.I.:s.n.],2017.
[10] BATSCH F,KANARACHOS S,CHEAH M,et al. A taxonomy of validation strategies to ensure the safe operation of highly automated vehicles[J]. Journal of Intelligent Transportation Systems,2022,26(1):14-33.
[11] 朱西產,劉智超,李霖. 基于自然駕駛數據的駕駛員緊急變道行為開環模型[J]. 汽車安全與節能學報,2015,6(4):328-332.
[12] PARK M K,LEE S Y,KWON C K,et al. Design of pedestrian target selection with funnel map for pedestrian AEB system[J]. IEEE Transactions on Vehicular Technology,2017,66(5):3597-3609.
[13] 劉杰. Apollo開放平臺的創新實踐[J]. 軟件和集成電路,2018(7):38-39.
[14] 蘇江平,陳君毅,王宏雁,等. 基于中國危險工況的行人交通沖突典型場景提取與分析[J]. 交通與運輸,2017,33(增刊1):209-214.
[15] 胡林,易平,黃晶,等. 基于真實事故案例的自動緊急制動系統兩輪車測試場景研究[J]. 汽車工程,2018,40(12):1435-1446.
[16] 徐向陽,周兆輝,胡文浩,. 基于事故數據挖掘的AEB路口測試場景[J]. 北京航空航天大學學報,2020,46(10):1817-1825.
[17] 康誠,嚴欣,唐曉峰. 智能網聯汽車自動駕駛仿真測試技術研究綜述[J]. 時代汽車,2022(22):4-6.
[18] 蔣燕. 自動駕駛仿真測試的關鍵場景生成工具設計與實現[D]. 南寧:廣西大學,2022.
[19] 鄢繼仁. 面向自動駕駛仿真測試的動態場景描述語言設計與實現[D]. 南寧:廣西大學,2022.
[20] 羅鐘林. 基于實時交通流映射的實車在環智能網聯汽車仿真系統研究[D]. 成都:電子科技大學,2022.
[21] 上官偉,李鑫,曹越, 等. 基于虛實結合的自動駕駛仿真測試技術與應用[C]//第十六屆中國智能交通年會科技論文集.長沙:[s.n.],2021:490-499.
[22] 曾德松,高琛,譚北海,等. 自動駕駛仿真測試場景庫構建研究[J]. 現代計算機,2021,27(31):1-12,32.
[23] 王潤民,趙祥模,徐志剛,等. 一種自動駕駛整車在環虛擬仿真測試平臺設計[J]. 汽車技術,2022(4):1-7.
[24] 王鳳嬌,宗巖,靳志剛,等. 自動駕駛仿真測試場景設計[J]. 科學技術創新,2020(29):100-101.
收稿日期:2023-02-09
猜你喜歡
話語研究論叢(2022年0期)2022-11-02 09:29:02
文化創新比較研究(2020年8期)2021-01-22 00:38:10
裝備制造技術(2020年2期)2020-12-14 03:09:44
鐵道通信信號(2020年8期)2020-02-06 09:13:18
電子制作(2019年10期)2019-06-17 11:45:16
石油瀝青(2018年6期)2018-12-29 12:07:04
NBA特刊(2018年21期)2018-11-24 02:47:52
自動化學報(2017年11期)2017-04-04 02:52:28
功能高分子學報(2016年1期)2016-04-26 01:39:05
法醫學雜志(2015年2期)2015-04-17 09:58:45
