智能駕駛功能風險預警策略研究
2024-08-24 00:00:00廖正凱侯立升宋沖沖代陽林李齊麗
汽車與新動力 2024年4期

關鍵詞:智能駕駛;人機交互;預期功能安全;高級駕駛輔助系統;風險預警
0 前言
近年來,智能駕駛技術發展迅速,成為汽車行業及學術界關注的熱點。隨著自動駕駛等級的不斷提升,從輔助駕駛到高度自動化駕駛,智能駕駛系統在復雜道路環境中的表現能力得到了顯著增強,極大地拓展了應用場景的廣度和深度。然而,技術的快速發展并未完全消除其內在的不確定性與風險,特別是在面對極端或罕見交通情境時,智能駕駛系統的決策機制可能會暴露出局限性,導致誤操作或失控的風險,威脅行車安全。為此,本文提出了一種創新性的智能化人機交互方案,旨在通過增強駕駛員與智能駕駛系統之間的信息交流,使駕駛員能夠實時掌握車輛的運行狀態與系統意圖,從而在必要時刻迅速、準確地介入車輛控制,糾正系統可能出現的非預期行為,以有效規避潛在的安全風險。
1 風險預防模型的提出
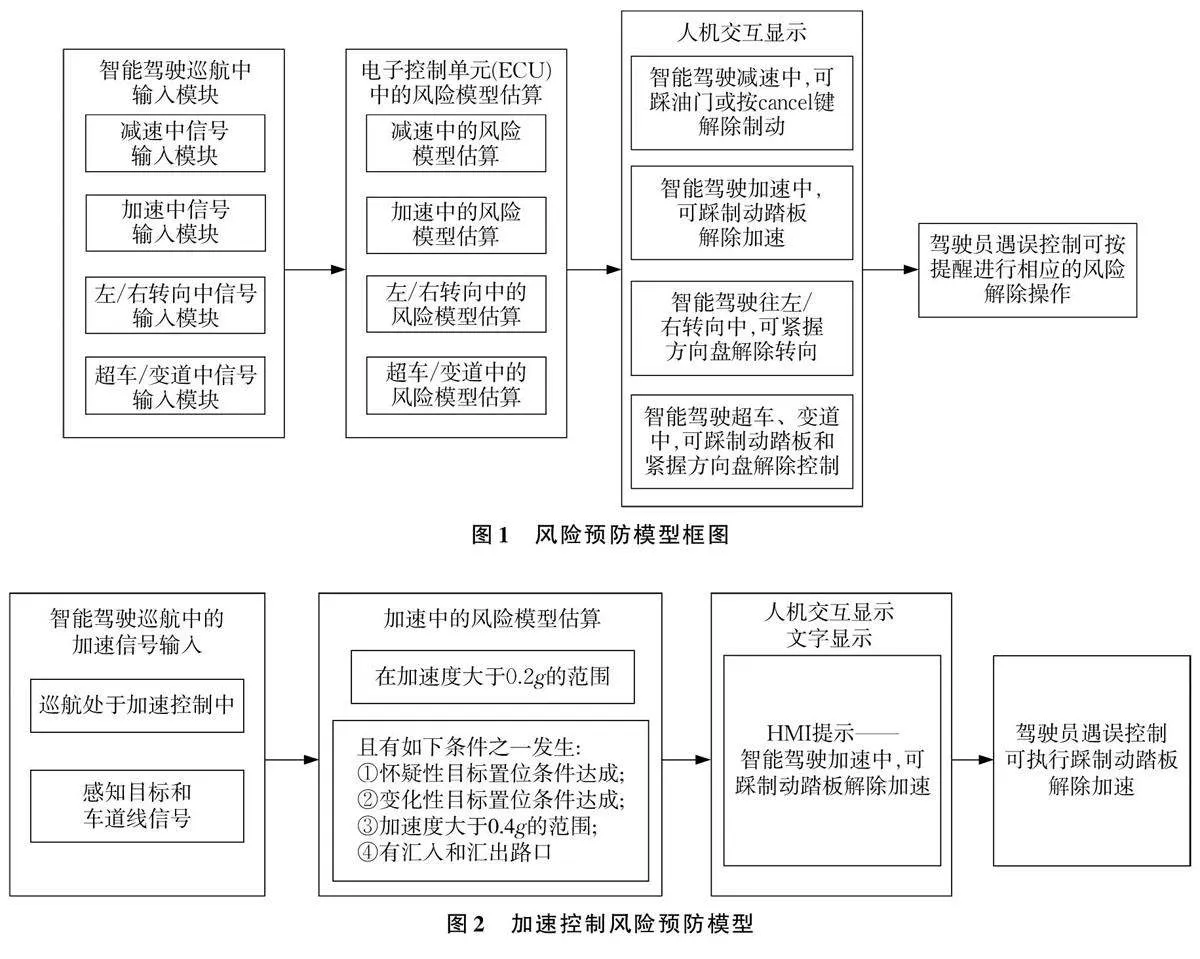
為了創建駕駛員智能化的人機交互方案,首先需要高級駕駛輔助系統(ADAS)創建風險預防模型,其主要包括:信息輸入模塊、風險模型估算模塊和人機交互顯示模塊。整體模型框如圖1所示。
在智能駕駛的風險預防模型估算條件下,設置人機交互界面(HMI)的提示區,設計非預期功能解除引導說明,輔助駕駛員快速規避風險。HMI 提醒功能可設計為預測和實時交互的文字顯示,或配有靈動的交互提示圖案,實時表征車輛的運動狀態和系統的操作意圖。
2 智能駕駛風險預防設計策略
2. 1 加速過程
ADAS功能處于加速控制中的風險預防設計方案如圖2 所示。智能駕駛巡航的加速控制風險預防模型運行的前提條件為:正常智能駕駛巡航工況,加速度大于0.2g(g為重力加速度)。在滿足前提條件的情況下,如下條件之一達成時,應進行HMI 提示——“智能駕駛加速中,可踩制動踏板解除加速”:
(1) 感知目標的懷疑性目標置信度判斷,即在雷達和攝像頭目標不一致或有部分目標不明確的情況下進行懷疑性目標判斷置位。感知目標置信度的判斷條件為:①雷達目標分類為行人,攝像頭目標為車輛等,針對雷達和攝像頭均有目標,但類別不同;②雷達和攝像頭目標的距離偏差大于30cm,但類別相同;③雷達和攝像頭的目標速度估算偏差大于10km/h,但位置和類別相同;④雷達目標大于1.5 倍攝像頭目標(尺寸、面積或體積),但類別、距離和速度估算基本相同;⑤雷達和攝像頭均有目標,目標分類未知且位置相同。
(2) 感知目標的變化性目標置信度判斷,即在融合目標有突變或目標定義不準確的情況時進行變化性目標判斷置位。
感知目標置信度的判斷條件為:①雷達和攝像頭目標從有目標到突然均丟失目標,在200 ms內又突然恢復目標,如此反復;②雷達和攝像頭目標從有第一分類均突變為第二分類,例如行人目標突然變為車輛目標;③雷達和攝像頭目標從靜止目標突然變為大于30 km/h 以上的目標;④ 雷達和攝像頭目標從30km/h以上目標突然變為靜止目標;⑤ 雷達和攝像頭目標突然變大或變小,達到1.5 倍比率差異。
(3) 自車加速度大于0.4g。
(4) 有匯入和匯出路口時,根據高精地圖和定位的信息或通過感知的記憶存儲地圖或感知實時顯示等,判斷有岔路口的匯入或匯出。
2. 2 減速過程
ADAS功能處于減速控制中的風險預防設計方案如圖3所示。
智能駕駛巡航的減速控制風險預防模型運行的前提條件為:正常智能駕駛巡航工況(自適應巡航控制(ACC)、高速智能駕駛輔助( HWA)等縱向控制模式)下,減速度在0.3g 以上。在滿足前提條件的情況下,如下條件之一達成時,進行HMI 提示——“智能駕駛減速中,可踩油門或按cancel 鍵解除制動”:
(1) 和感知目標的懷疑性目標置信度判斷,即在雷達和攝像頭目標不一致或有部分目標不明確的情況下進行懷疑性目標判斷置位。
(2) 感知目標的變化性目標置信度判斷,即在融合目標有突變或目標定義不準確的情況時進行變化性目標判斷置位。
(3) 減速度大于0.4g。若減速度大于0.4g,突然退出ADAS 控制可能帶來駕駛員不可接管的風險。駕駛員進行踩油門動作800 ms(可標定)左右且油門開度達到40%(可標定)以上就可實現風險解除,并接管車輛,從而規避實際車輛前方沒有目標而進行誤制動的被追尾風險。
2. 3 轉向過程
在ADAS控制器智能判斷控制車輛處于轉向中的動作執行過程中,存在因誤識別目標或車道線而進行非駕駛員意圖或不符合環境的轉向動作風險。為此,提出ADAS功能處于轉向控制中的風險預防設計方案,如圖4所示。
智能駕駛巡航的轉向控制風險預防模型運行的前提條件為:車輛存在轉向動作幅度,且轉向速率超過1.5 (°)/s(該閾值基于車輛動力學分析模型,并通過模擬直線路段上向左或向右的轉向偏離情景進行校準得出)。
駕駛員發現風險并進行介入的轉向操作時間標定為3 s,此時間足夠滿足駕駛員進行脫手到接管響應的適應性反饋時間,但并不適合于當前高階ADAS 功能出錯的搶救時間,一般發生風險時高階ADAS 的搶救時間為1~2 s[1-2]。
在滿足前提條件的情況下,本文提出了更合理的智能化人機交互方案,如下條件之一達成,即可進行HMI 提示——“ 智能駕駛往左/右轉向中,可緊握方向盤解除轉向動作”:
(1) 在車道線識別的置信度判斷。有多種或復雜車道線的特征時,有轉向動作;識別為當前車道線合理性之外的一條或多條車道線。
(2) 在左/右側車道或旁邊有目標物時,有轉向動作;當兩側均有目標物,往左預測2 s 內有碰撞,往右預測2 s 內有碰撞,且車輛并非處于轉向角度為微調居中情況(標定居中車道內的平均修訂值)或已處于居中范圍允許的范圍內的行駛狀態,此時有轉向動作。
(3) 在前方有岔路口自車匯出時,有轉向動作;根據高精地圖和定位的信息或通過感知的記憶存儲地圖或感知實時顯示等,判斷有岔路口的匯出。
(4) 在前方有交匯路口,自車并入時,有轉向動作。
(5) 在有懷疑目標插入或切出時,有轉向動作;判斷插入或切出的目標物有突變特征或有懷疑性特征,進行提醒。
(6) 在車道線突變時,有轉向動作,包括:① 車道線從有到突然均丟失,在200 ms 內又突然恢復,如此反復;② 車道線從有第一分類突變為第二分類。
(7) 在有彎道半徑小于250 m 時,有轉向動作。
3 風險預防模型的設計流程
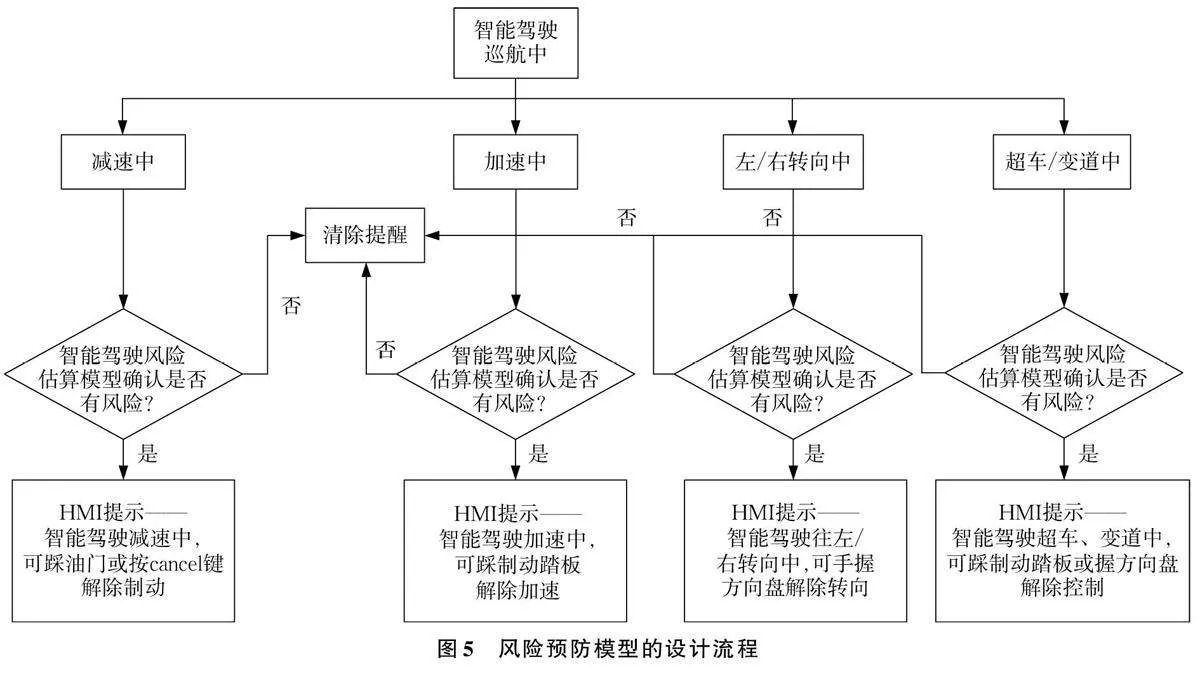
根據智能駕駛巡航的功能安全和預期功能安全開發基礎,選擇風險因素的特征進行風險點提取,以操縱和感知為主要導向進行安全因素的分支篩選,并結合功能安全的設計約束門限,進行風險覆蓋度劃分,從而創建到模型的算法應用中,形成“非常規行駛范圍”“有幅度的操縱”和“不確定性的校驗”等情況下的HMI 交互。風險預防模型的設計流程如圖5所示。
4結語
本文提出了更合理的智能化人機交互方案,可提升駕駛員對智能駕駛系統實時狀態的認知,增強行車的安全性。該方案預留了準備解除風險和校對風險的時間,使駕駛更加安全可靠,體驗感更好。采用更貼近人性化的交互設計,如類似機器人溝通式的智能駕駛交互體驗,使車輛的人機交互更加靈動化。本文所提出的智能化人機交互方案,可為未來高階智能駕駛技術的應用提供實踐路徑和設計參考。
