基于UWB 與PDR 的井下人員融合定位方法
2024-08-22 00:00:00賈宇濤李冠華潘紅光陳海艦魏緒強白俊明
工礦自動化 2024年6期

摘要:現有超寬帶(UWB)與行人航位推算(PDR)融合定位方法大多忽略了非視距(NLOS)環境下的定位誤差校正,以簡單的閾值劃分作為NLOS 環境判斷依據,而閾值劃分在很大程度上與定位場景及場地大小相關。針對上述問題,提出一種考慮NLOS 環境的基于UWB 與PDR 的井下人員融合定位方法。首先,利用UWB 技術進行井下人員位置解算,通過三邊定位算法得到人員初步位置后,使用最小二乘法對位置進行優化,通過多項式擬合實現NLOS 環境下基站和標簽之間實際值和測量值之間的擬合,減小NLOS 環境下的測距誤差,提高定位精度。其次,采用PDR 算法對步態進行識別和分析,PDR 算法使用慣性導航傳感器采集的步態數據,通過步態識別、步長估計和方向估計,實現目標位置的更新;然后,通過卷積神經網絡(CNN)?長短期記憶(LSTM)網絡分析信道脈沖響應(CIR)特征,實現視距(LOS)/NLOS 識別,解決NLOS 環境判斷存在場景限制的問題;最后,根據LOS/NLOS 識別結果確定融合系數,實現UWB 和PDR 定位結果融合。測試結果表明:多項式擬合后UWB 平均測距誤差降低0.59 m;LOS/NLOS 識別的平均準確率為95.3%,召回率和F1 分數均在90% 以上,驗證了CNN?LSTM 具有較好的識別效果;融合定位方法的平均誤差為0.31 m,較UWB 降低1.57 m,較PDR 降低1.41 m。
關鍵詞:井下人員定位;UWB;行人航位推算;PDR;融合定位;非視距環境;最小二乘法;多項式擬合;CNN?LSTM;LOS;NLOS
中圖分類號:TD655.3 文獻標志碼:A
0 引言
煤礦井下人員位置監測系統是礦山安全避險“六大系統”之一 ,在煤礦安全生產、事故應急救援和事故調查中發揮著重要作用[1]。通過實時監測和定位礦工的位置,井下人員定位系統可以提供關鍵的安全保障,在緊急情況下,救援人員可以快速定位礦工并展開救援行動。現有單一井下人員定位技術有WiFi 定位、藍牙定位、超聲波定位、紅外線定位、無線射頻識別(Radio Frequency IdentificationDevices,RFID)定位、超寬帶(Ultra-Wideband,UWB)定位、行人航位推算(Pedestrian Dead Reckoning,PDR)等[2-5]。其中,WiFi、藍牙等方法在信號傳播過程中易受環境條件影響, 穩定性差, 定位精度不高[6-7];超聲波和紅外線等只適用于小范圍定位[8-9];RFID 作用范圍有限,只適用于近距離定位;UWB 定位在視距(Line of Sight,LOS)環境下精度高,但是易受非視距(Non Line of Sight,NLOS)環境影響;PDR算法會產生較大累計誤差。
由于單一定位算法無法克服自身缺陷,所以定位技術逐漸向多技術融合方向發展[10]。KongXiaotong 等[11]提出了一種基于低功耗藍牙(BluetoothLow Energy,BLE)和PDR 的混合室內定位方法,將BLE 的位置、距離測量結果與PDR 定位結果深度融合,提高了定位精度。李宗偉等[12]提出了一種基于飛行時間(Time of Flight,TOF)測距定位和捷聯慣導定位的煤礦井下人員融合定位方法,定位精度在1 m 左右。吳靜然等[13]設計了一種基于改進接收信號強度指示器(Received Signal Strength Indicator,RSSI)和PDR 的礦井人員融合定位系統,采用擴展卡爾曼濾波進行融合,平均定位誤差為1.79 m。趙子凡等[14]提出一種UWB 和慣導結合的定位算法,在短距離定位中提高了NLOS 環境下的定位精度,但是在長距離定位中受定位場景影響較大,不適用于長距離定位。由于井下環境的復雜性,目前融合定位方法在定位精度和定位范圍等方面還存在缺陷[15]。
UWB 定位技術在數據環境下定位精度高,但受NLOS 影響較大,而PDR 算法不受NLOS 的影響[16-17],因此,UWB 與PDR 融合定位方法效果較好。但現有UWB 與PDR 融合定位方法大多忽略了NLOS 環境下的定位誤差校正[18-21];此外,在進行NLOS 環境判斷時,以簡單的閾值劃分作為NLOS 環境的判斷依據,而閾值劃分在很大程度上與定位場景及場地大小相關[22]。針對上述問題,本文通過多項式擬合校正降低NLOS 環境對定位精度的影響,提高井下復雜環境中的人員定位精度;此外,在融合UWB 與PDR 的同時,利用神經網絡解決NLOS 環境判斷存在場景限制的問題。
1 方法原理
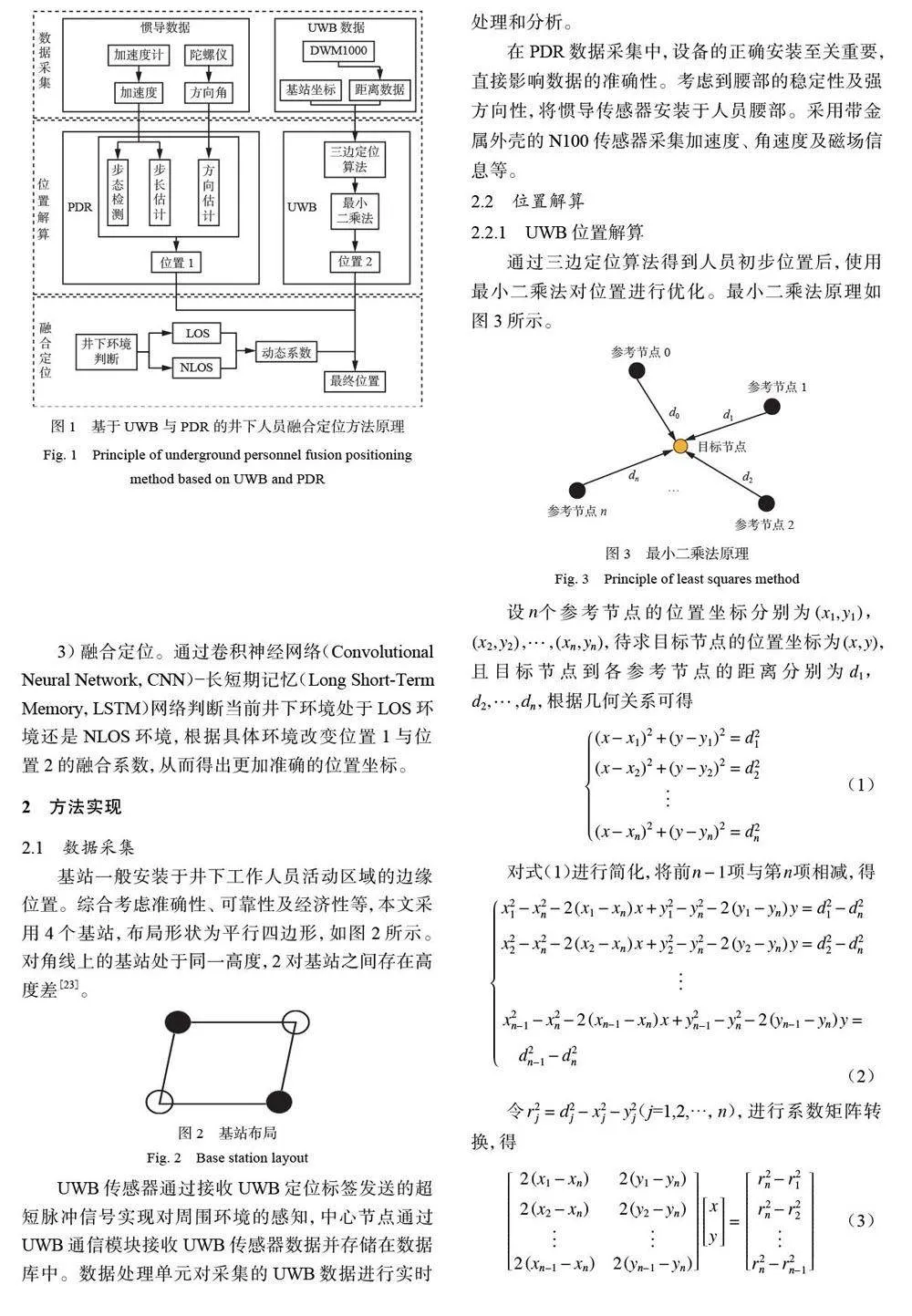
基于UWB 與PDR 的井下人員融合定位方法包括數據采集、位置解算、融合定位3 個部分, 如圖1 所示。
1) 數據采集。使用慣導傳感器(包含加速度計和陀螺儀)采集加速度和方向角數據,通過DWM1000傳感器采集UWB 數據,測得標簽到各基站的距離,提前確定UWB 基站的位置坐標。
2) 位置解算。位置解算包括PDR 位置解算和UWB 位置解算2 個部分。PDR 位置解算通過加速度數據檢測人員步態,算出人員行走的步數,同時通過步長估計模型得到人員平均步長,再利用方向角數據得到人員行走的方向,之后使用PDR 算法位置更新模型解算出人員位置(位置1)。UWB 位置解算利用標簽與基站之間的距離,通過三邊定位算法得到初步位置,再使用最小二乘法對位置進行優化,獲得UWB 解算位置(位置2)。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年12期)2021-08-24 03:30:40
中老年保健(2021年11期)2021-08-22 03:15:44
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34