TOA聯(lián)合DOA估計的UWB定位方法
2024-08-09 00:00:00黃小島
電子產(chǎn)品世界 2024年6期
關(guān)鍵詞:超寬帶;定位;TOA;DOA
中圖分類號:TN929.5;TN911.7 文獻(xiàn)標(biāo)識碼:A
0 引言
隨著無線通信行業(yè)的迅猛發(fā)展,市面上出現(xiàn)了ZigBee、超寬帶(ultra wide band,UWB)、Wi-Fi等新型通信技術(shù)。其中,UWB 無線定位技術(shù)憑借其自身功耗低、安全可靠、定位精確度高等優(yōu)勢,被廣泛地應(yīng)用于無線定位領(lǐng)域中,并取得了良好的應(yīng)用效果。無線測距方法根據(jù)估計參數(shù)的不同可以劃分為信號到達(dá)時間(time of arrival,TOA)和信號到達(dá)方向(direction of arrival,DOA)兩種方法[1]。當(dāng)應(yīng)用UWB 定位系統(tǒng)進(jìn)行信號源具體位置估計時,通常需參考多個節(jié)點,這增加了系統(tǒng)成本。假設(shè)參考某一節(jié)點,可以同時估計信號源的時間、角度兩個參數(shù),那么技術(shù)人員僅參考單一節(jié)點,即可實現(xiàn)快速估計和確定信號源位置坐標(biāo)。例如,多位學(xué)者提出TOA 聯(lián)合DOA估計方法[2-3],并在UWB 定位系統(tǒng)進(jìn)行了廣泛的應(yīng)用,但該方法在具體使用時,需要對信號的相關(guān)矩陣進(jìn)行有效估計,整個估計流程較復(fù)雜;Iwakiri 等[4] 在參照時間域平滑相關(guān)技術(shù)的基礎(chǔ)上,提出一種TOA 聯(lián)合到達(dá)角度(angle of arrival,AOA)估計方法,應(yīng)用該方法進(jìn)行時間域平滑處理時,通常會耗費大量的時間成本,導(dǎo)致系統(tǒng)復(fù)雜度以及對分辨率的要求不斷增加。為解決以上問題,本文基于矩陣束時延估計算法,提出一種TOA 聯(lián)合DOA 估計的UWB 定位方法。該方法在具體應(yīng)用時,需選用一臺接收機,對信號源的時間、角度兩個參數(shù)進(jìn)行同時估計,計算信號源的到達(dá)距離和方向,從而快速計算和求解信號源所在位置坐標(biāo)[5]。
1 UWB定位系統(tǒng)模型及無線定位理論基礎(chǔ)
1.1 UWB 定位系統(tǒng)模型
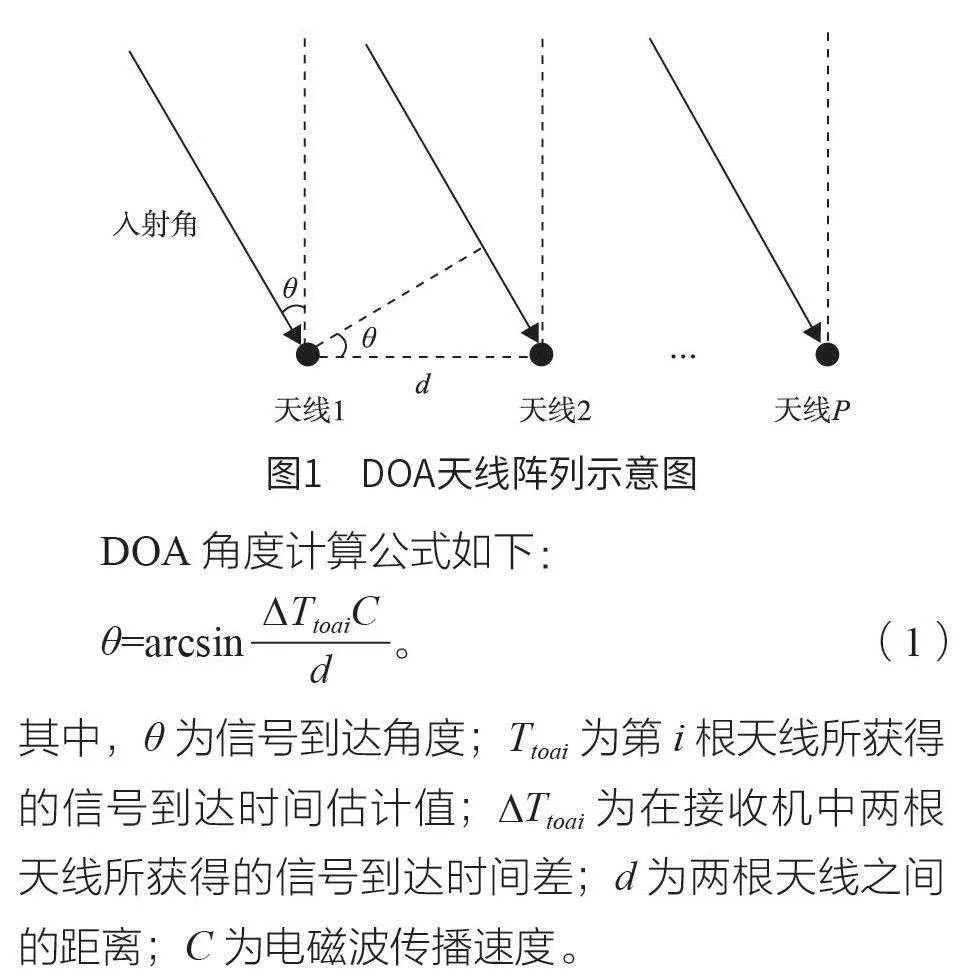
在UWB 定位系統(tǒng)模型中,主要使用DOA 天線陣列模型,如圖1 所示。假設(shè)信號源距離天線陣列較遠(yuǎn),當(dāng)信號源傳達(dá)和入射至天線陣列時,通常采用平行入射的方式[3]。
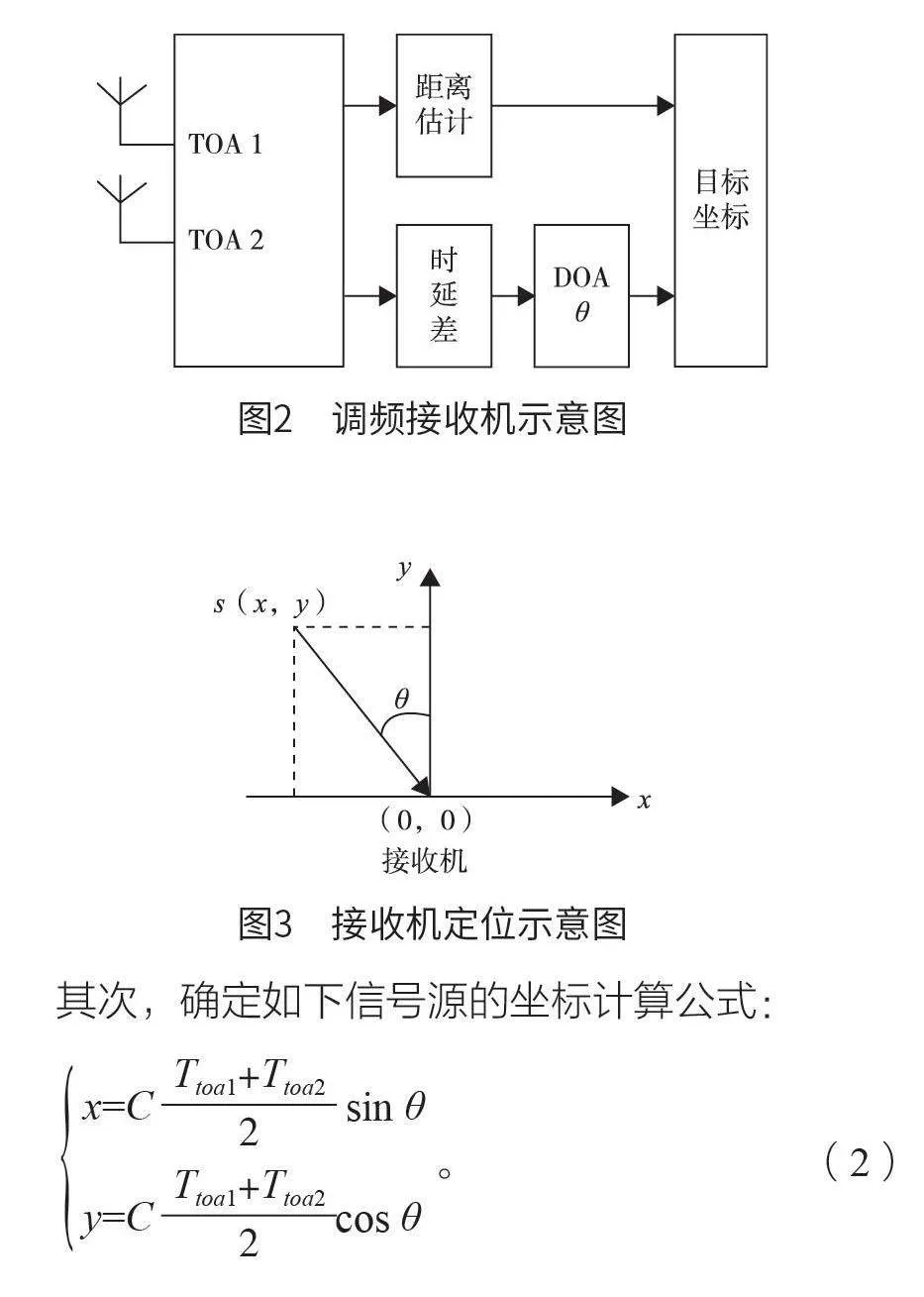
在求解信號源到達(dá)兩根天線的時延差時,通常使用以下兩種方法:①通過計算兩根天線的信號到達(dá)時間差,求解出信號源到達(dá)兩根天線的時延差;②運用互相關(guān)運算法,對兩根天線的信號進(jìn)行處理,獲得信號源到達(dá)兩根天線的時延差[4]。但是,UWB 信號具有分辨率低、傳播速率快等優(yōu)勢。在求解超寬帶信號源到達(dá)兩根天線的時延差時,技術(shù)人員要優(yōu)先選用第一種方法,從而保證最終估計結(jié)果的精確度。在UWB 定位系統(tǒng)中,除了使用調(diào)頻發(fā)射機外,還選用了調(diào)頻接收機,調(diào)頻接收機示意圖如圖2 所示。
技術(shù)人員應(yīng)用接收機,可以對信號源到達(dá)時間進(jìn)行精確化測量,從而獲得相應(yīng)的時延差。根據(jù)式(1)計算信號到達(dá)角度,同時,基于信號源與接收機之間的距離,計算信號源位置坐標(biāo)。
在計算信號源位置坐標(biāo)時,首先需要構(gòu)建直角坐標(biāo)系。如圖3 所示,將接收機的位置設(shè)置為坐標(biāo)系原點。
1.2 混合參數(shù)定位法
由于信道環(huán)境瞬息萬變,僅僅使用單一參數(shù),無法實現(xiàn)對目標(biāo)對象的精確定位,而混合參數(shù)定位法的出現(xiàn)和應(yīng)用,可以解決以上問題。混合參數(shù)定位法將到達(dá)時間定位法、到達(dá)時間差定位法等多種定位方法進(jìn)行有效融合,結(jié)合所獲取的定位參數(shù)信息,對目標(biāo)對象進(jìn)行精確化、高效化定位,從而提高UWB 定位系統(tǒng)的運行性能。目前,比較常用的混合參數(shù)定位法是TOA 和DOA 聯(lián)合定位法,其可以構(gòu)建相應(yīng)的估計定位模型,借助單個節(jié)點就可以快速定位目標(biāo)對象位置,有效降低UWB 定位系統(tǒng)的節(jié)點數(shù)量和開銷成本。
2 TOA聯(lián)合DOA估計算法概述
本文提出的TOA 聯(lián)合DOA 估計的UWB 定位方法主要使用矩陣束時延估計算法,該算法詳細(xì)描述內(nèi)容如下。
3 仿真實驗
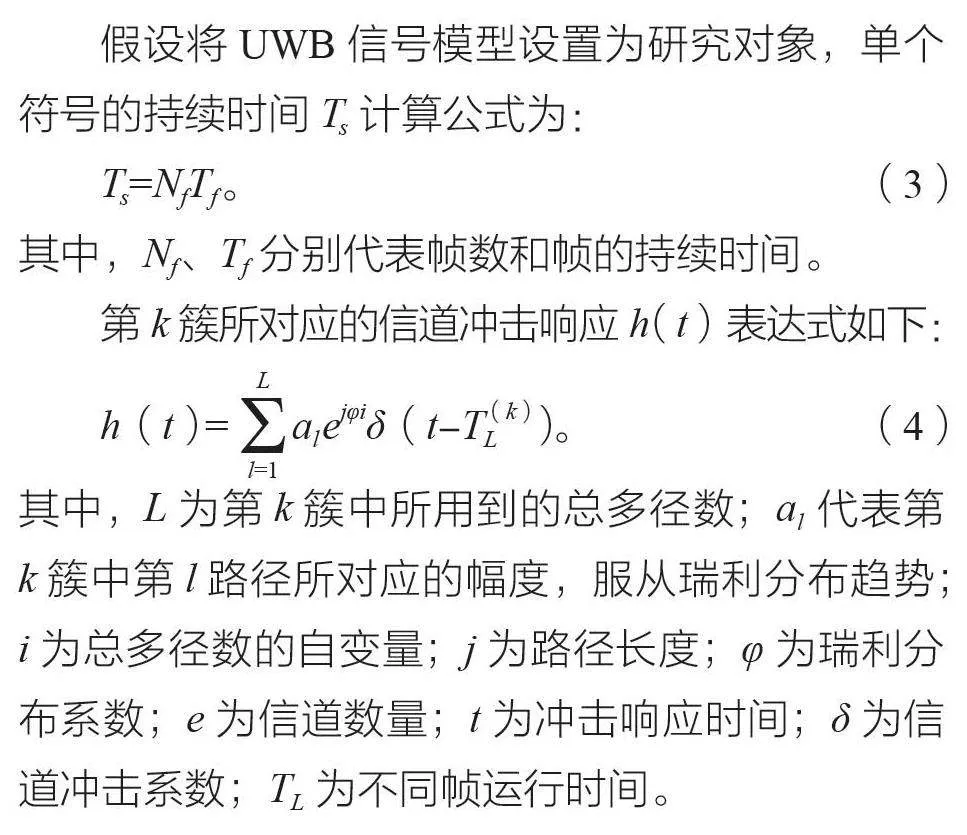
本文采用仿真實驗的方式,借助MATLAB 軟件,對本文定位方法的有效性和可靠性進(jìn)行仿真和驗證。在本次仿真實驗中,將UWB 信號模型設(shè)置為研究對象,UWB 信號模型的脈沖寬度、每幀持續(xù)時間、采樣頻率分別設(shè)置為1 ns、10 ns、2 GHz。
3.1 TOA與DOA參數(shù)聯(lián)合估計結(jié)果
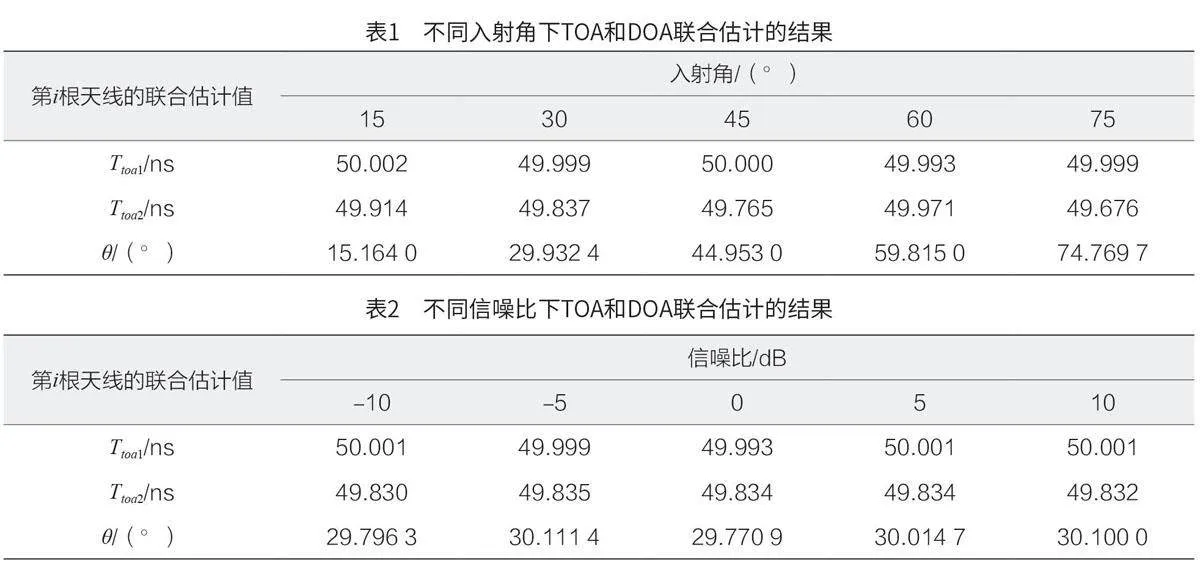
在單個接收機中,主要采用兩根天線,兩根天線的間距通常控制在10 cm 以上。將第一條到達(dá)路徑的時延設(shè)置為信號到達(dá)時間參數(shù),將信號源與接收機之間的間距設(shè)置為16 m,從而保證后期信號源平行入射效果;將信噪比設(shè)置為5 dB,在不同入射角下,技術(shù)人員同時估計接收機兩根天線的信號TOA 和DOA 兩個參數(shù),從而獲得不同入射角下TOA 和DOA 聯(lián)合估計的結(jié)果(表1)。從表1 可以看出,在矩陣束時延估計算法的應(yīng)用背景下,本文提出的TOA 聯(lián)合DOA 估計的UWB 定位方法具有較高的精確度,可以精確地估計出時間和角度兩個參數(shù)。
當(dāng)信號源入射角保持不變時,通過改變信噪比,運用TOA 聯(lián)合DOA 估計的UWB 定位方法獲得估計值,不同信噪比下TOA 和DOA 聯(lián)合估計的結(jié)果如表2 所示。從表2 可以看出,本文算法在不同信噪比下可以精確估計接收機兩根天線的信號TOA 和DOA 兩個參數(shù)。
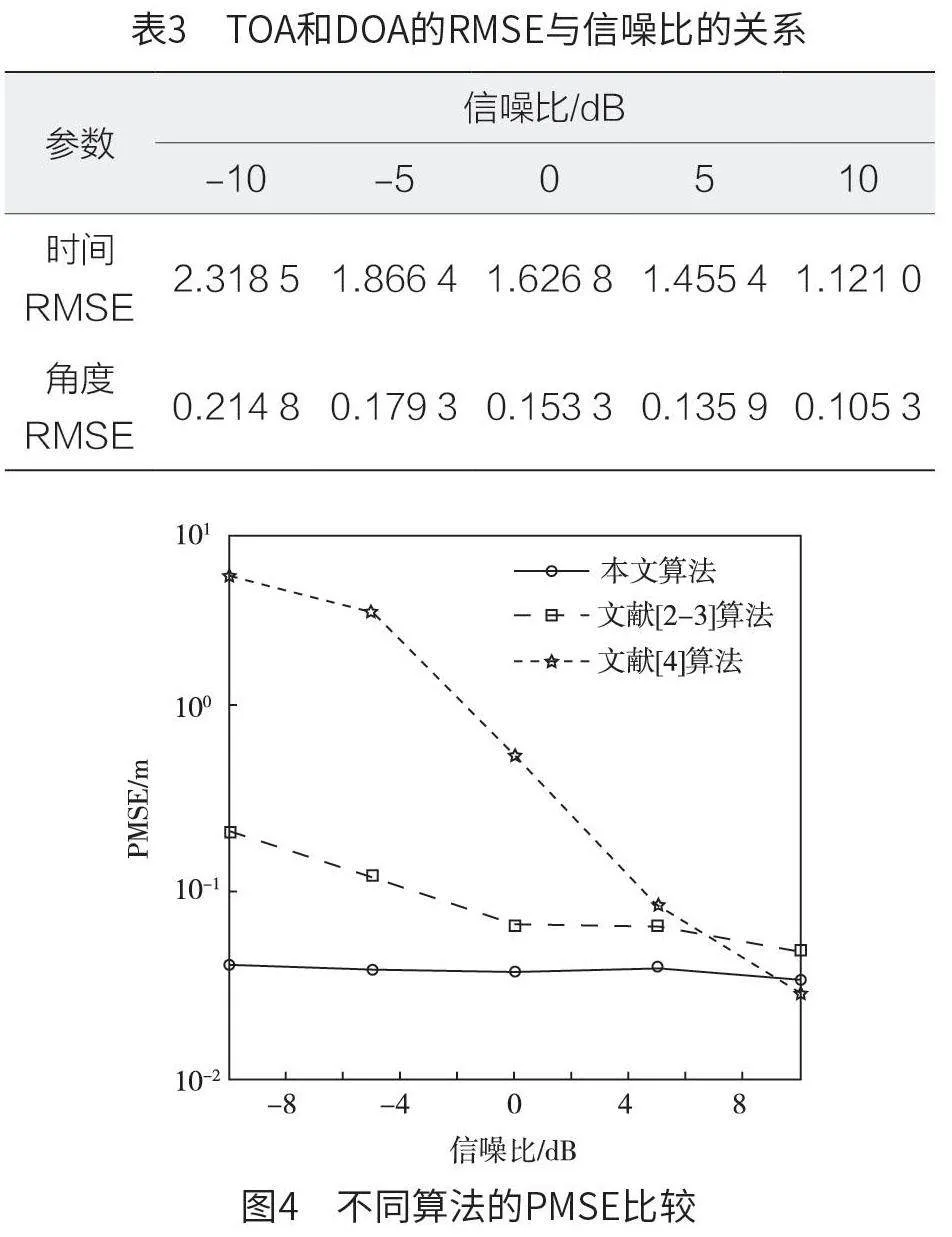
為更好地反映TOA 和DOA 估計誤差與信噪比之間的關(guān)系,需在不同信噪比下,將信號源估計次數(shù)設(shè)置為1000 次,獲得如表3 所示的實驗結(jié)果。從表3 可以看出,TOA 和DOA 的均方根誤差(rootmean square error,RMSE)性能與信噪比之間存在負(fù)相關(guān)關(guān)系,前者會隨著后者的增加而呈現(xiàn)出不斷下降的趨勢,這表明信噪比越高,本文估計算法所獲得的估計精確度越高。
3.2 TOA 聯(lián)合DOA估計的UWB定位方法仿真
將一個接收機放置在邊長為50 m 的正方形平面某一邊的中間位置,該位置坐標(biāo)為(25,0),仿真軟件自動生成5 個目標(biāo)點,5 個目標(biāo)點與該接收機之間的間距應(yīng)控制在10 m 以上,為后期信號源平行入射創(chuàng)造良好的條件。在仿真軟件隨機產(chǎn)生的5 個目標(biāo)點的定位圖中,所估計出的位置坐標(biāo)與實際位置坐標(biāo)基本吻合,這表明本文提出的UWB 定位方法具有較高的有效性和可靠性,可以實現(xiàn)對信號源位置的精確化估計。在不同的信噪比下,對比不同算法對目標(biāo)位置估計的預(yù)測均方誤差(prediction mean squared error,PMSE), 如圖4 所示。從圖4 中可以看出,與文獻(xiàn)[2-3] 中的TOA 聯(lián)合DOA 估計算法和文獻(xiàn)[4] 的TOA 聯(lián)合AOA 估計算法相比,本文算法PMSE 較小,這說明本文算法在TOA 和DOA 參數(shù)估計方面的精確度較高,因此,本文算法具有較高的有效性和可靠性。
4 結(jié)語
本文基于矩陣束時延估計算法提出一種TOA聯(lián)合DOA 估計的UWB 定位方法。該方法在具體應(yīng)用中,僅僅借助單個接收機,即可實現(xiàn)對發(fā)射機具體位置的精確估計和確定,降低了系統(tǒng)成本。此外,本文定位方法還具有計算量少、運行速度高、運算成本低等優(yōu)勢,通過進(jìn)行時延參數(shù)估計,可以快速確定出角度參數(shù)。綜上,本文定位方法具有較高的有效性和可靠性,可以實現(xiàn)對信號源位置的精確化估計,滿足了UWB 系統(tǒng)定位應(yīng)用需求,因此值得被進(jìn)一步推廣和應(yīng)用。