基于場端智能的自動(dòng)泊車系統(tǒng)安全即服務(wù)架構(gòu)研究
2024-07-05 11:01:01艾凌風(fēng)
時(shí)代汽車 2024年12期
艾凌風(fēng)
摘 要:基于場端智能的自動(dòng)泊車系統(tǒng)是一種重要的車路協(xié)同應(yīng)用案例。針對(duì)此類系統(tǒng)當(dāng)前行業(yè)痛點(diǎn),文章創(chuàng)新性地提出了場端基礎(chǔ)設(shè)施安全即服務(wù)(Safety as a Service)架構(gòu),通過將場端功能模塊化、服務(wù)化,顯著降低了車端適配難度,擴(kuò)大了智能基礎(chǔ)設(shè)施適用范圍,有助于推動(dòng)智能駕駛從L2向L4及以上平滑演進(jìn),加速產(chǎn)業(yè)化落地。
關(guān)鍵詞:自動(dòng)泊車系統(tǒng) 智慧停車場 安全即服務(wù) 合作式智能交通系統(tǒng)
1 引言
隨著智能化和網(wǎng)聯(lián)化的浪潮席卷全球汽車產(chǎn)業(yè),自動(dòng)泊車系統(tǒng)(Automated Parking Systems)作為智能交通體系的重要組成部分,正在逐漸成為連接車輛和基礎(chǔ)設(shè)施的關(guān)鍵節(jié)點(diǎn)。在中國,特別是在政策推動(dòng)和技術(shù)進(jìn)步的雙重影響下,自動(dòng)泊車技術(shù)迎來了迅猛發(fā)展。本文聚焦于自動(dòng)泊車系統(tǒng)中場端智能的應(yīng)用,識(shí)別當(dāng)前技術(shù)落地的痛點(diǎn),并提出了一種基于場端智能的安全即服務(wù)(Safety as a Service, SaaS)架構(gòu)。
2 緒論
2.1 研究目的及意義
當(dāng)前,中國汽車工業(yè)在電氣化、智能化、網(wǎng)聯(lián)化和共享化方面都做出了非常多創(chuàng)新的、規(guī)模化的應(yīng)用[1]。依托完善的基礎(chǔ)設(shè)施和人工智能領(lǐng)域龐大的人才隊(duì)伍,我國汽車智能化發(fā)展有著廣闊的前景[2]。
與此同時(shí),高級(jí)別自動(dòng)駕駛在經(jīng)歷快速發(fā)展期后,近年顯示出降溫趨勢(shì),其原因是多方面的:一是商業(yè)模式不清晰,未能孵化出可規(guī)模化推廣的成熟模式;二是消費(fèi)者接受程度不及預(yù)期;三是高級(jí)別自動(dòng)駕駛功能可用度和安全性不及預(yù)期。為此,我們有必要加速汽車產(chǎn)業(yè)、交通產(chǎn)業(yè)與通信產(chǎn)業(yè)的跨界融合發(fā)展,加快智能網(wǎng)聯(lián)與高階自動(dòng)駕駛功能融合方案的產(chǎn)業(yè)化落地。
2.2 自動(dòng)泊車功能發(fā)展現(xiàn)狀
2.2.1 單車智能發(fā)展現(xiàn)狀
目前,最廣泛采用的自動(dòng)駕駛分級(jí)標(biāo)準(zhǔn)由國際汽車工程師協(xié)會(huì)(SAE)提出。該標(biāo)準(zhǔn)將自動(dòng)駕駛技術(shù)水平劃分為6個(gè)等級(jí):即L0級(jí)別的人類駕駛、L1級(jí)別的輔助駕駛、L2級(jí)別的部分自動(dòng)駕駛、L3級(jí)別的有條件自動(dòng)駕駛、L4級(jí)別的高度自動(dòng)駕駛及L5級(jí)別的完全自動(dòng)駕駛[3]。
我國單車智能市場滲透率正快速提升,以泊車功能為例,L0、L1基本輔助駕駛功能(倒車輔助等)已廣泛應(yīng)用;L2級(jí)及L2++功能(APA、RPA、HPA等)正在進(jìn)入加速量產(chǎn)階段。L3、L4級(jí)VPA/AVP功能也正在限定區(qū)域進(jìn)行測試和商業(yè)落地探索。
2.2.2 場端智能發(fā)展現(xiàn)狀
目前,對(duì)于停車場智能基礎(chǔ)設(shè)施的能力等級(jí)的劃分尚未形成國家標(biāo)準(zhǔn),但各地已陸續(xù)出臺(tái)智慧停車場相關(guān)技術(shù)要求。以上海為例,《上海市智慧停車場(庫)建設(shè)技術(shù)導(dǎo)則(試行)》中規(guī)定,智慧停車系統(tǒng)按其智慧化程度可分為G1、G2、G3 三個(gè)等級(jí):G1 級(jí)為停車場(庫)智慧停車系統(tǒng),應(yīng)具備地圖、泊位感知、行人定位、反向?qū)ぼ嚨瘸跫?jí)智慧停車服務(wù);G2 級(jí)在滿足G1級(jí)別功能基礎(chǔ)上,提供空泊位導(dǎo)航,尋車導(dǎo)航,精準(zhǔn)泊位預(yù)約等中級(jí)智慧停車服務(wù);G3 級(jí)在滿足G2級(jí)別功能基礎(chǔ)上通過加裝場端感知系統(tǒng)和路側(cè)通信單元(V2X),實(shí)現(xiàn)智能泊車與車場協(xié)同,支持自動(dòng)駕駛落地。地方政府正在大力推廣高級(jí)別自動(dòng)駕駛停車場端基礎(chǔ)設(shè)施的建設(shè),其主要目的是通過車路協(xié)同方式,支持智能泊車,推動(dòng)自動(dòng)駕駛落地。
從產(chǎn)業(yè)界來看,市面上已有多家企業(yè)發(fā)布了了支持高級(jí)別自動(dòng)泊車的場端技術(shù)方案,例如:聯(lián)通智網(wǎng)在ITS大會(huì)上發(fā)布的”5G+AI智慧泊車服務(wù)系統(tǒng)“;通過在場端布置激光雷達(dá)、攝像頭等傳感器為車輛提供安全預(yù)警功能;還可通過室內(nèi)北斗為車輛提供定位支持;博世AVP解決方案,則通過場端雙目攝像頭與邊緣計(jì)算設(shè)備,代替車輛進(jìn)行感知和規(guī)劃,并由車端進(jìn)行執(zhí)行;禾多科技發(fā)布的 HoloParking AVP 解決方案;運(yùn)用車端、場端和高精地圖“三端合一”技術(shù)實(shí)現(xiàn)車輛自主尋車位、泊入、取車等代客泊車功能。
2.2.3 行業(yè)痛點(diǎn)
需要指出的是,盡管針對(duì)自動(dòng)泊車技術(shù)的技術(shù)研發(fā)和標(biāo)準(zhǔn)制定均已取得了長足的進(jìn)步,但絕大多數(shù)功能仍為L2級(jí)別,難以真正解決泊車難的問題。同時(shí),基礎(chǔ)設(shè)施端面臨投資大,回報(bào)周期長,車輛少等問題,沒有形成良好地商業(yè)模式。概括而言,當(dāng)前高級(jí)別自動(dòng)泊車商業(yè)落地仍面臨以下主要問題:一是高智能場端基礎(chǔ)設(shè)施向下兼容能力不佳;二是車端智能長尾效益明顯,預(yù)期安全難以滿足,駕駛員需在環(huán)[4];三是車場融合方案權(quán)責(zé)不清;四是通信方式不統(tǒng)一。
3 智能基礎(chǔ)設(shè)施安全即服務(wù)架構(gòu)設(shè)計(jì)
3.1 系統(tǒng)架構(gòu)
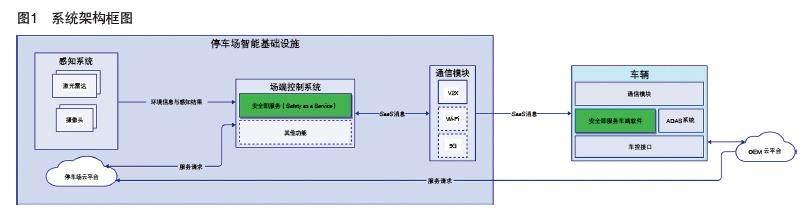
本研究描述的系統(tǒng)架構(gòu)是一類系統(tǒng)的抽象形式,可結(jié)合市面上相關(guān)智能基礎(chǔ)設(shè)施泊車系統(tǒng)實(shí)施。常見的高級(jí)別自動(dòng)泊車智慧基礎(chǔ)設(shè)施通常包含以下主要模塊:一是場端感知系統(tǒng),由按需布置的激光雷達(dá)、單目及雙目攝像頭組成,可實(shí)時(shí)檢測停車場環(huán)境,定位目標(biāo)車輛和障礙物;二是場端控制系統(tǒng),可對(duì)感知結(jié)果進(jìn)行融合并根據(jù)環(huán)境下達(dá)泊車過程中的控制指令、定位數(shù)據(jù)和路徑信息;三是場端通信模塊,用于收發(fā)泊車過程中需要的消息[5]。此外,該系統(tǒng)應(yīng)至少提供一種滿足IEC61508 SIL2等級(jí)要求的安全機(jī)制。
在假定車端具備L2++自動(dòng)泊車功能的前提下,本文將重點(diǎn)介紹該車輛如何通過使用本系統(tǒng)提供的安全即服務(wù)能力,實(shí)現(xiàn)部分或全部的L4級(jí)高階泊車功能,系統(tǒng)架構(gòu)圖如圖1所示。
3.2 關(guān)鍵技術(shù)
3.2.1 車場通信
車場通信包含兩方面內(nèi)容,其一是用于傳輸服務(wù)請(qǐng)求、認(rèn)證信息以及業(yè)務(wù)邏輯數(shù)據(jù)的傳輸通道,由于涉及到多個(gè)系統(tǒng)之間的城域或跨城域數(shù)據(jù)交換,業(yè)界比較通用做法是使用基于蜂窩網(wǎng)絡(luò)的移動(dòng)通信方式。其二是用于傳輸場端控制信息等安全相關(guān)消息的傳輸通道,當(dāng)前常用方案包括5G、Wi-Fi和C-V2X。
本方案選擇使用C-V2X作為主要通信方式。C-V2X是融合蜂窩通信與直通通信的車聯(lián)網(wǎng)通信技術(shù),它可以提供兩種互補(bǔ)的通信模式:一種是基于PC5接口的直通模式;另一種是基于 Uu 接口實(shí)現(xiàn)的蜂窩網(wǎng)絡(luò)通信[6]。該技術(shù)的主要優(yōu)勢(shì)包括:一是能提供針對(duì)車聯(lián)網(wǎng)應(yīng)用的低時(shí)延、高可靠V2X通信能力;二是國家大力推廣,前裝滲透率快速上升;三是協(xié)議標(biāo)準(zhǔn)化程度高。
3.2.2 服務(wù)發(fā)布
具備安全即服務(wù)能力的停車場基礎(chǔ)設(shè)施,可以通過兩種方式向外發(fā)布服務(wù)信息:一是通過云平臺(tái)發(fā)布服務(wù)信息;車輛在到達(dá)停車場前就可以通過接口獲取支持的停車場及其能力,以及該服務(wù)覆蓋范圍(電子圍欄);二是通過RSU設(shè)備向覆蓋范圍內(nèi)的車輛廣播服務(wù)信息及覆蓋范圍。
進(jìn)入SaaS模式后,場端以100ms周期向車發(fā)送安全行駛令牌,上述軟件則需要對(duì)令牌進(jìn)行校驗(yàn),校驗(yàn)的內(nèi)容包括令牌有效期和令牌中攜帶的車輛安全行駛動(dòng)態(tài)指標(biāo)(是例如最大速度、前輪最大最小轉(zhuǎn)角等)。只有當(dāng)令牌有效且動(dòng)態(tài)指標(biāo)滿足條件時(shí),車輛繼續(xù)行駛,否則安全即服務(wù)客戶端軟件會(huì)覆寫ADAS系統(tǒng)控制指令,觸發(fā)制動(dòng)。即在使用SaaS服務(wù)并切換到L4模式后,行駛令牌具有最高優(yōu)先級(jí)。該軟件在運(yùn)行時(shí)會(huì)在車端記錄所有令牌消息,可用于結(jié)合車端其他數(shù)據(jù)、圖像進(jìn)行事故定責(zé)。
3.2.3 系統(tǒng)狀態(tài)機(jī)
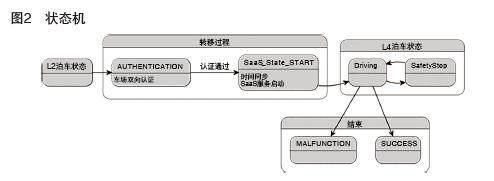
車端在請(qǐng)求安全服務(wù)后,會(huì)經(jīng)歷如圖2所示狀態(tài)轉(zhuǎn)移過程:1. 從L2泊車狀態(tài)進(jìn)入轉(zhuǎn)移過程,此過程可發(fā)生在交接點(diǎn)或行駛過程中;2. 進(jìn)行車場雙向認(rèn)證,成功后進(jìn)行時(shí)間同步并啟動(dòng)SaaS服務(wù);3. 當(dāng)收到第一個(gè)有效的SaaS行駛令牌后,安全責(zé)任由車端轉(zhuǎn)移到場端;4. 進(jìn)入L4泊車行駛狀態(tài),場端每100ms發(fā)送一個(gè)SaaS行駛令牌到車端,僅當(dāng)令牌有效時(shí)車輛可以行駛,否則車輛制動(dòng);5. 車輛制動(dòng)后進(jìn)入安全靜止?fàn)顟B(tài),僅當(dāng)再次收到有效的令牌時(shí)重新進(jìn)入行駛狀態(tài);6. 泊車成功或因不可恢復(fù)錯(cuò)誤進(jìn)入結(jié)束狀態(tài)。
3.2.4 安全即服務(wù)客戶端軟件
安全仲裁由部署在車端的安全即服務(wù)軟件執(zhí)行。該軟件部署在車端滿足ASIL-B等級(jí)的ECU中,通信功能可部署在OBU設(shè)備中;安全令牌轉(zhuǎn)發(fā)時(shí)需要進(jìn)行加密。
進(jìn)入SaaS模式后,上述軟件會(huì)收到場端以100ms周期向車發(fā)送安全行駛令牌并對(duì)其校驗(yàn),校驗(yàn)的內(nèi)容包括令牌有效期和令牌中攜帶的車輛安全行駛動(dòng)態(tài)指標(biāo)(是例如最大速度、前輪最大最小轉(zhuǎn)角等)等。若令牌有效且動(dòng)態(tài)指標(biāo)滿足,車輛繼續(xù)行駛,否則SaaS軟件會(huì)覆寫ADAS系統(tǒng)控制指令,觸發(fā)制動(dòng)。即在使用SaaS服務(wù)并切換到L4模式后,行駛令牌具有最高優(yōu)先級(jí)。該軟件在運(yùn)行時(shí)會(huì)在車端記錄所有令牌消息,可用于結(jié)合車端其他數(shù)據(jù)、圖像進(jìn)行事故定責(zé)。
3.3 典型場景分析
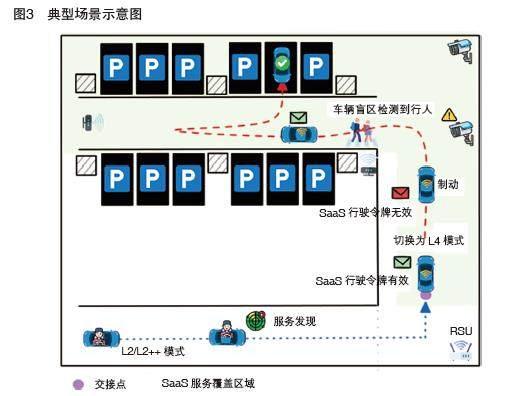
圖3所示為一G3級(jí)停車場,該場端滿足ISO 23374規(guī)定的Type2類型要求[7],但僅能向同樣符合標(biāo)準(zhǔn)的車輛提供L4等級(jí)的服務(wù),因此適配車輛少,向下兼容性差。經(jīng)本研究進(jìn)行安全功能服務(wù)化改造后,該場端可在其傳感器覆蓋區(qū)域提供SaaS(安全即服務(wù))服務(wù),服務(wù)兼容ISO 23374規(guī)定的三種類型車輛并能夠向L0-L4級(jí)的自動(dòng)駕駛車輛提供服務(wù)。
典型應(yīng)用場景如圖3所示:首先,車輛入場后基于車端智能進(jìn)行自動(dòng)泊車,并運(yùn)行在輔助駕駛模式(L2/L2++),駕駛員需進(jìn)行監(jiān)控;當(dāng)收到路端RSU或云端發(fā)布的SaaS服務(wù)后,行駛至交接點(diǎn)進(jìn)行認(rèn)證并啟動(dòng)SaaS服務(wù),切換為自動(dòng)駕駛模式(L4),駕駛員移出責(zé)任鏈。車輛行駛過程中,場端傳感器會(huì)以”上帝視角“監(jiān)控整個(gè)區(qū)域,可有效解決車輛傳感器盲區(qū)等問題。當(dāng)檢測到危險(xiǎn)時(shí),場端停止發(fā)送有效的行駛令牌,觸發(fā)車輛制動(dòng)。在整個(gè)過程中,車輛依靠車端智能進(jìn)行定位、巡航、泊車等操作。僅有安全仲裁能力在權(quán)責(zé)交接后由場端代理,此時(shí)場端安全指令具有最高優(yōu)先級(jí)。
4 結(jié)束語
本研究從智能基礎(chǔ)設(shè)施安全機(jī)制服務(wù)化角度出發(fā),基于安全即服務(wù)模式有效地解決了前文所述的當(dāng)前智慧停車場基礎(chǔ)設(shè)施所面臨的諸多問題。另一方面,本系統(tǒng)還存在如下可改進(jìn)點(diǎn):一是進(jìn)一步推進(jìn)C-V2X標(biāo)準(zhǔn)化以及車輛SaaS軟件標(biāo)準(zhǔn)化,降低集成門檻;二是進(jìn)一步提高系統(tǒng)的適用范圍,例如支持室外停車場;三是進(jìn)一步提高場端系統(tǒng)模塊化能力,使系統(tǒng)可集成停車場已有傳感器和其他設(shè)備,降低場端建設(shè)成本,縮短建設(shè)周期。
參考文獻(xiàn):
[1]王恒凱,杜建宇,厲健峰,等.自動(dòng)代客泊車技術(shù)發(fā)展現(xiàn)狀及趨勢(shì)分析[J].汽車文摘,2022(1):52-56..
[2]蔡自興. 中國人工智能40年[J]. 科技導(dǎo)報(bào), 2016,34(15):12-32.
[3]李磊磊. 自動(dòng)駕駛汽車產(chǎn)業(yè)發(fā)展研究及展望[J]. Automotive Digest, 2023 (9).
[4]夏以檸. 生成式人工智能技術(shù)進(jìn)展及其在自動(dòng)駕駛領(lǐng)域的 應(yīng)用與展望[J]. Automobile Technology,2023(9).
[5]彭江磊. 自主泊車系統(tǒng)的開發(fā)研究[J].科學(xué)與信息化,2023(12):52-56.
[6]陳山枝,葛雨明,時(shí)巖. 蜂窩車聯(lián)網(wǎng)(C-V2X)技術(shù)發(fā)展、應(yīng)用及展望[J].電信科學(xué),2022,38(1):1-12.
[7]ISO 23374-1:2023. Intelligent Transport Systems - Automated Valet Parking Systems (AVPS) - Part 1: System Framework, Requirements For Automated Driving And For Communications Interface[S]. 2023.