倒車輔助裝置后視攝像及探測系統測試方法研究
2024-07-01 22:51:29屈亞洲周麗萍吳云兵吳雯珺
專用汽車 2024年6期
屈亞洲 周麗萍 吳云兵 吳雯珺

摘要:從倒車輔助裝置后視攝像及探測系統測試技術出發,梳理了后視攝像及探測系統關鍵評價指標,并分析了倒車輔助裝置后視攝像及探測系統測試方法。針對倒輔助系統中關鍵的后視攝像系統及雷達探測系統,提出包括后視攝像系統可視視角、響應時間以及雷達探測系統響應時間等評價指標為一體的測試方案。經驗證,該方案可以很好地滿足企業測試需求,可為企業提供研發驗證及法規認證支持,縮短試驗周期。
關鍵詞:倒車輔助裝置;后視攝像頭;探測系統;響應時間
中圖分類號:U472.6? 收稿日期:2024-04-12
DOI:1019999/jcnki1004-0226202406032
1 前言
近年來,因機動車倒車引發的交通事故案例屢見不鮮,據全國道路交通事故統計年報公開數據統計,2008—2016年,因機動車違法倒車導致的事故27 763起,造成人員死亡6 872人,直接經濟財產損失達65 181 057元。因此,為降低因駕駛員視野盲區而導致交通事故發生的概率,國內外頒布了一系列標準法規用以約束OEM主機廠商提升產品質量。如GB 15084—2022《機動車輛 間接視野裝置性能和安裝要求》、UN R158《倒車裝置和機動車關于駕駛員對車輛后方弱勢道路使用者感知的統一規定》、FMVSS 111《Rear Visibility》等都對能保護弱勢道路使用者安全的倒車輔助裝置性能做了強制要求。
倒車影像系統(即后視攝像系統)和探測系統,都是倒車輔助裝置的一種技術手段,其中前者主要是在倒車時將倒車攝像頭圖形顯示到車載終端上,如中控主機、后視鏡,司機倒車時通過顯示屏幕觀察后方動態[1];后者探測系統主要是當車輛倒車不斷靠近障礙物時,通過雷達探測倒車距離,并利用蜂鳴器通過改變自身的頻率對駕駛員進行提示,從而幫助駕駛控制倒車距離[2]。二者的相互協作,可以從視覺和聽覺兩個層面對駕駛員進行倒車信息提示,因此在乘用車領域獲得了廣泛應用。
2 后視攝像及探測系統關鍵評價指標
后視攝像及探測系統(也稱“倒車監測系統”)是先進輔助駕駛系統(ADAS)功能[3]的一種,可為駕駛員提供視覺、聽覺或觸覺信號,常用于日常倒車時提醒駕駛員車輛后方視野盲區障礙物或其他交通參與者。由于其很好地彌補了傳統車輛間接視野裝置(如后視鏡)的不足,同時也減緩了駕駛員倒車過程中因注意力高度集中引起的不適感,尤其是對于駕駛經驗不是很豐富的新手,極大地提升了駕乘體驗。
然而它作為智能網聯汽車功能之一,仍需像其他輔助駕駛系統(如自動緊急剎車AEB、前方碰撞預警FCW)一樣,在裝車之前需進行測試評價,以符合標準法規對其功能的要求。基于此,本文參考UN R158《倒車裝置和機動車關于駕駛員對車輛后方弱勢道路使用者感知的統一規定》和FMVSS 111《Rear Visibility》標準對后視攝像及探測系統的技術要求進行梳理,得到了如表1所示的幾類測評指標,后續并結合這幾項測試指標進行測試方案設計及測試評價[4]。
3 后視攝像及探測系統測試原理
為深入研究后視攝像及探測系統的測試方法,本文參考UN R158和FMVSS111標準技術要求,并針對表1的指標進行梳理分析,提出自己的測試方案。
31 后視攝像系統
311 響應時間
響應時間是評估倒車監測系統響應快慢的評價指標,其主要是以掛入倒擋時刻以及后視視野圖像顯示時刻作差獲得。目前UN R158標準中并未對具體的測試方法進行規定,僅給出了如下(a)~(e)的測試步驟;而FMSS 111標準中給出了具體的測試方法,如采用感光器感應后尾燈及后視圖像,以及視頻錄制分析視頻幀兩種形式來確定響應時間Δt。同時在開展UN R158實際的試驗過程中,為了記錄掛入R擋時刻也有采用光電開關以及讀取CAN報文的形式進行觸發記錄,因此針對響應時間的測量可根據實際試驗環境進行試驗方案設計。
UN R158標準給出的測試步驟如下:
a.將車輛置于主動車輛模式,該動作應啟動/開始第1計時器。
b.等待至少6 s。
c.通過選擇倒車模式啟動倒車事件,如果在進入主動車輛模式6 s后無法將車輛置于倒車模式,則應在技術上盡可能快地啟動倒車事件。
d.根據制造商的規范,啟動/開始第2個計時器,且不遲于倒擋模式或擋位接合時。
e.在第2個計時器上記錄響應時間,直到顯示器上完全可以看到后視。
312 可視視角
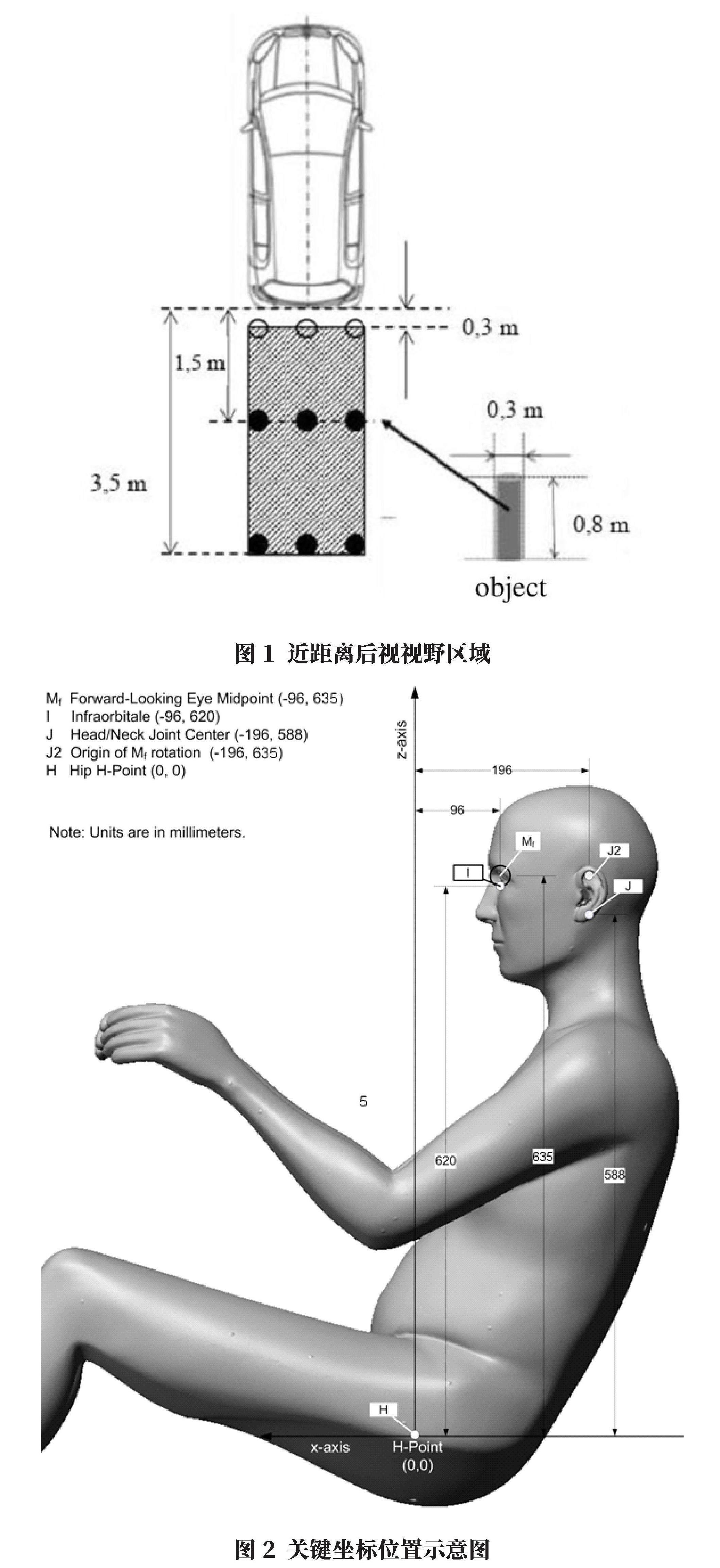
a.確定后方近距離視野區域。
如圖1所示,在車輛后方近距離視野區域確定A、B、C、D、E、F、G、H、I等位置,依次或每橫排放置高度為08 m,直徑為03 m,且具有015 m×015 m上下移動色塊的測試目標圓柱體。其中,第一排圓柱體要求頂部或移動色塊至少一個位置可見;第二排、第三排整個圓柱體完全可見,且最后一排3個目標物可視視角要滿足表1要求。
b.確定Mr點-成像平面中心位置。
如圖2所示,Mr點是指以J2為旋轉中心,以J2Mf為旋轉半徑,直至Mf與用于顯示后視圖像的可視顯示器中心之間的直線距離[a]eye最短,定義此時新的Mf旋轉位置為Mr,也即相機成像平面中心位置,并同時將35 mm或更大相機或攝像機成像平面中心置于Mr點,具體確定步驟可參考文獻[2]所述。
c.確定比例因子Sscale。
為確定比例因子Sscale,在中控顯示屏位置粘貼50 mm比例尺,利用第(2)步固定的相機或攝像機拍攝后視視野畫面照片,并測量50 mm比例尺寬度以及最后一排目標物G、H、I在照片中的寬度dG、dH、dI,之后將照片中比例尺的寬度與實際長度作比,即可得到比例因子Sscale。
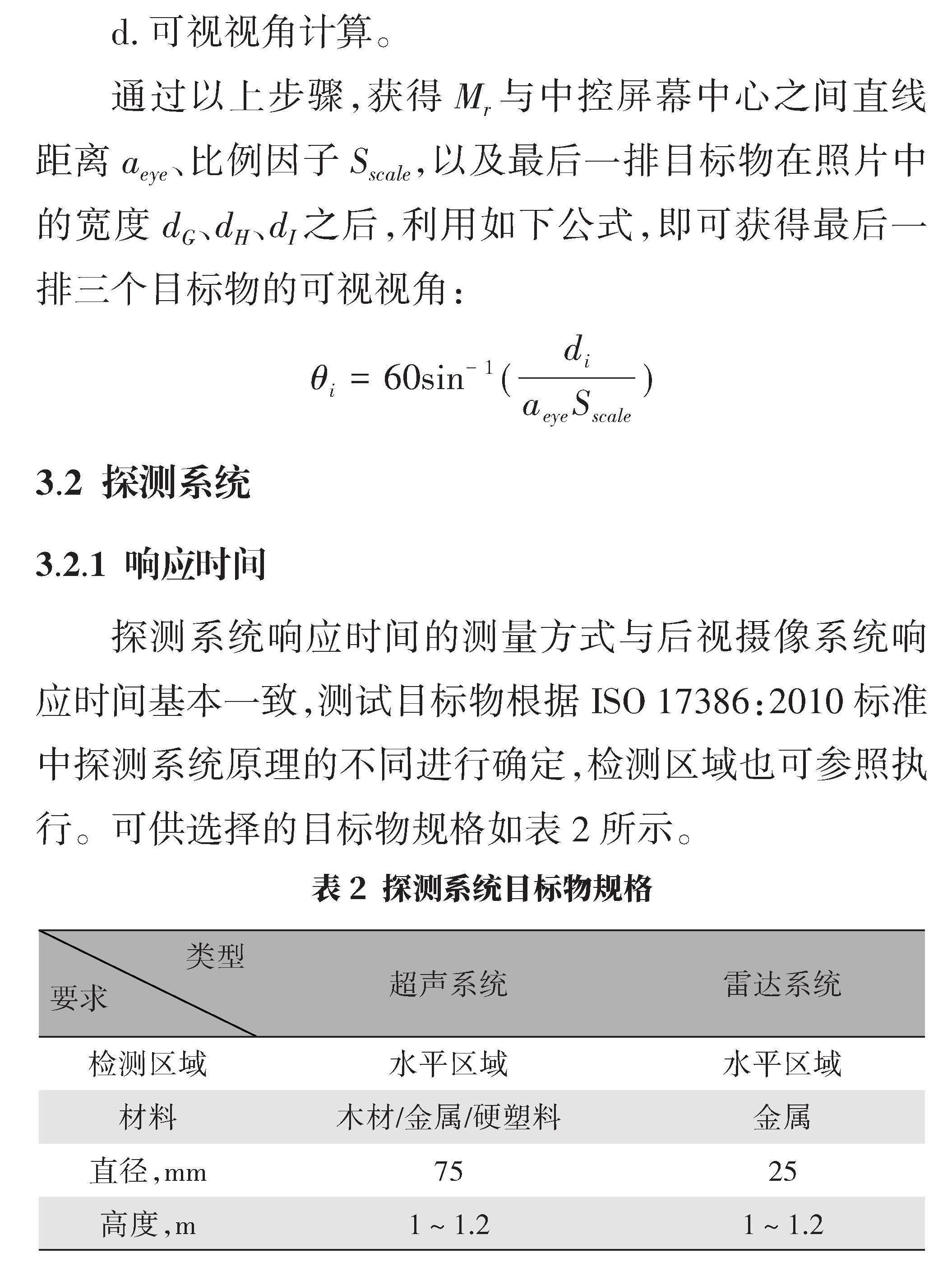
d.可視視角計算。
通過以上步驟,獲得Mr與中控屏幕中心之間直線距離[a]eye、比例因子Sscale,以及最后一排目標物在照片中的寬度dG、dH、dI之后,利用如下公式,即可獲得最后一排三個目標物的可視視角:
[θi=60sin?1(diaeyeSscale)]
32 探測系統
321 響應時間
探測系統響應時間的測量方式與后視攝像系統響應時間基本一致,測試目標物根據ISO 17386:2010標準中探測系統原理的不同進行確定,檢測區域也可參照執行。可供選擇的目標物規格如表2所示。
322 聲音分貝及頻率
根據ISO 15006:2011及DIN 45631標準,建議車內音頻信號主要可聽分量應在400~2 000 Hz之間,聲音分貝值為50~90 dB之間。由于人耳對聲音的感覺,其頻率分辨能力不是單一頻率而是頻帶,而1/3倍頻程比較符合人耳特性的頻帶劃分方法,因此在做分貝值測量時,建議采用該倍頻程。
4 后視攝像及探測系統測試
41 后視攝像系統測試
以某車型開展后視攝像系統測試,為測量后視攝像系統響應時間及后視視角,試驗采用視頻錄制的形式,試驗過程示例如圖3~圖5所示,具體測試方案按3.1.2中的步驟進行。
a.將三維H點裝置假人放置駕駛員側,并同時將載荷加至車輛行駛狀態質量,以及輪胎氣壓充至制造商規定值。
b.將輔助工裝固定至三維H點裝置假人上方,并三坐標測量機打點,確定包括車輛H點坐標、J2點坐標、相機成像平面中心坐標以及中控顯示屏成像中心坐標。其中,攝像機到中控顯示屏成像中心的最短距離[a]eye基于J2點、相機成像平面中心、中控顯示屏成像中心三點確定。
c.將采集掛入R擋時刻及后視圖像顯示時刻的相機固定至合適位置,并接入數據采集器系統。
d.最后按照311和312所述測試方法進行響應時間和可視視角計算。
得到測試結果如表3所示。
42 雷達探測系統
雷達響應時間、聲音分貝及頻率的測試相較于后視攝像系統測試,略微簡單,僅需布置攝像頭、數據采集器、麥克風等設備,并按照321所示目標物和322聲音信號要求進行測試。試驗過程示例如圖6、圖7所示,具體測試方案如下:
a.按照321的所述,將測試目標物放置于指定檢測區域。
b.將采集掛入R擋時刻及光學報警信號的相機固定至合適位置,以及采集聲音報警信號的麥克風布置駕駛員耳旁,并將視頻信號和報警信號同時接入數據采集器系統。
c.采用簡化場景,共10個點位,依次將目標物放置相應位置,采集報警聲音信號及光學信號,并記錄。
這里以1個測試點位為例,如圖7所示,采用1/3倍頻程對聲音報警信號進行分析,得到其聲音報警信號頻率分布在1 250 Hz左右,其他測試結果如表4所示。
5 結語
本文首先梳理了倒車輔助裝置相關標準,分析了倒車輔助裝置中后視攝像及探測系統測試方法,并提出了包括后視攝像系統可視視角、響應時間以及雷達探測系統響應時間等評價指標為一體的測試方案。最后基于某款車型的后視攝像及探測系統進行驗證,結果表明,該方案可以很好地滿足企業功能驗證及法規認證需求,縮短研發周期。
參考文獻:
[1]孫德生基于ADAS的汽車倒車防碰撞系統設計與研究[J]電子技術應用,2021,47(01):28-30+35
[2]王杰身基于汽車倒車輔助系統的設計探討[J]時代汽車,2020,(7):101-103
[3]李瑩ADAS領域專利狀況分析[J]河南科技,2017(10):45-47
[4]劉強,孫秋晨,韓艷娜UN R158后方可見度及探測裝置法規簡析[J]中國汽車,2023(10):9-15
作者簡介:
屈亞洲,男,1992年生,工程師,研究方向為智能網聯汽車信息安全及場景仿真測試。
基金項目:寧波市重點研發計劃暨“揭榜掛帥”項目(2023Z070)