基于小型機(jī)器人工程項(xiàng)目的“過程與控制”模塊教學(xué)
2024-06-28 15:30:01王雙
中國(guó)信息技術(shù)教育 2024年12期
王雙
摘要:本文以“自動(dòng)駕駛外賣服務(wù)”機(jī)器人工程項(xiàng)目為例,詳細(xì)解析了課堂小型機(jī)器人工程的項(xiàng)目設(shè)計(jì)與工程實(shí)現(xiàn),以及“過程與控制”模塊的教學(xué)要點(diǎn),旨在通過充滿現(xiàn)實(shí)意義和挑戰(zhàn)的學(xué)習(xí),進(jìn)一步發(fā)展學(xué)生的工程思維,豐富工程技術(shù)相關(guān)的思想與方法,同時(shí),增強(qiáng)學(xué)生的自我效能感以及自主可控使命感。
關(guān)鍵詞:過程與控制;自主可控;工程思維;技術(shù)思想與方法;現(xiàn)實(shí)干擾因素
中圖分類號(hào):G434 ?文獻(xiàn)標(biāo)識(shí)碼:A ?論文編號(hào):1674-2117(2024)12-0040-05
《義務(wù)教育信息科技課程標(biāo)準(zhǔn)(2022年版)》(以下簡(jiǎn)稱“新課標(biāo)”)中的“過程與控制”模塊為學(xué)生開啟了自動(dòng)控制與智能控制的大門,成為幫助學(xué)生領(lǐng)悟技術(shù)自主可控深層含義的重要平臺(tái)。學(xué)生通過學(xué)習(xí)與實(shí)踐,逐漸理解控制系統(tǒng)的模塊化設(shè)計(jì)、“輸入—計(jì)算—輸出”的控制環(huán)節(jié)、反饋機(jī)制在優(yōu)化系統(tǒng)穩(wěn)定性中的作用,以及計(jì)算機(jī)控制中邏輯與數(shù)值運(yùn)算對(duì)于精準(zhǔn)控制的重要性。這些基礎(chǔ)知識(shí)與技能的學(xué)習(xí)比較適合通過簡(jiǎn)單、小型的控制系統(tǒng)來傳授。因此,本文選取“自動(dòng)駕駛外賣服務(wù)”機(jī)器人工程項(xiàng)目,并詳細(xì)解析課堂小型機(jī)器人工程的項(xiàng)目設(shè)計(jì)與工程實(shí)現(xiàn),以及“過程與控制”模塊的教學(xué)要點(diǎn)。
項(xiàng)目設(shè)計(jì)
1.項(xiàng)目任務(wù)描述
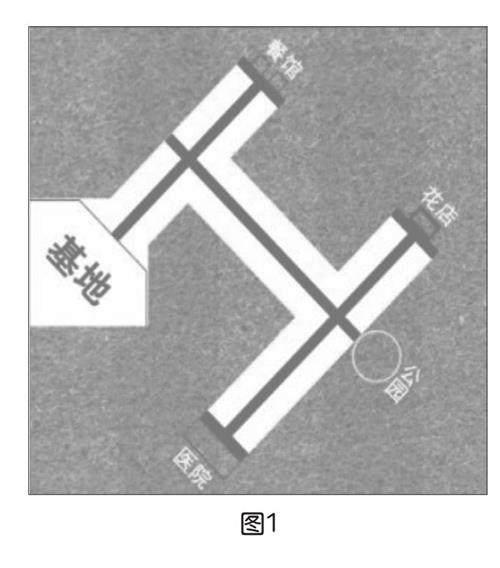
機(jī)器人需要在規(guī)定的路徑上自動(dòng)行駛,在規(guī)定時(shí)間前將外賣箱及花籃送到指定地點(diǎn)(如圖1)。
(1)任務(wù)要求及得分如下頁表所示。
(2)時(shí)間得分:完成任務(wù)的團(tuán)隊(duì),可獲得時(shí)間分,時(shí)間分=60-完成任務(wù)用時(shí)。
(3)總得分=任務(wù)得分+時(shí)間得分。
(4)場(chǎng)地描述。場(chǎng)地的尺寸可視信息科技教室面積而定。在課時(shí)和教室面積有限的情況下,建議場(chǎng)地邊長(zhǎng)在1.0~1.2米,最多兩個(gè)項(xiàng)目組共享一塊場(chǎng)地,這樣既可以保障每組都有充分的時(shí)間進(jìn)行調(diào)試,又可以產(chǎn)生組間的互相促動(dòng)和影響。
2.項(xiàng)目設(shè)計(jì)要點(diǎn)解析
(1)能持續(xù)激發(fā)學(xué)生的興趣。由教學(xué)實(shí)踐可知,動(dòng)態(tài)交互性強(qiáng)且能即時(shí)反饋的挑戰(zhàn)性任務(wù)更能吸引學(xué)生參與。例如,“自動(dòng)駕駛外賣服務(wù)”機(jī)器人工程項(xiàng)目既與生活緊密相連,又滲透了科技在改善生活和服務(wù)社會(huì)發(fā)展中的重要作用,有助于激發(fā)學(xué)生的學(xué)習(xí)興趣,并在潛移默化中發(fā)展學(xué)生應(yīng)用科技改造社會(huì)的意識(shí)。
(2)簡(jiǎn)化任務(wù)與分層設(shè)計(jì)。鑒于課時(shí)有限,項(xiàng)目應(yīng)在2~3課時(shí)內(nèi)完成,以確保教學(xué)活動(dòng)的連貫性和學(xué)生的持續(xù)投入。本項(xiàng)目采取任務(wù)分層設(shè)計(jì)的策略,分為簡(jiǎn)單版和提升版兩種難度。簡(jiǎn)單版任務(wù)僅要求小車到達(dá)指定節(jié)點(diǎn)即可得分,提升版則要求在簡(jiǎn)單版的基礎(chǔ)上優(yōu)化控制的質(zhì)量與效率,這樣的設(shè)計(jì)旨在確保所有學(xué)生都能獲得成就感,并保持學(xué)習(xí)的積極性。
(3)突出技術(shù)思想與方法的核心地位。由于課時(shí)有限,對(duì)于沒有實(shí)施硬件搭建教學(xué)的學(xué)校,在項(xiàng)目實(shí)施中可以弱化對(duì)硬件搭建的要求,為學(xué)生提供預(yù)先搭建好的小車,并配備兩個(gè)巡線傳感器,這樣可以使學(xué)生不被煩瑣的硬件搭建工作所困擾,從而有更多時(shí)間和精力深入探索技術(shù)思想,實(shí)踐各種技術(shù)方法,并激發(fā)出更多的創(chuàng)新思維。
(4)在評(píng)分標(biāo)準(zhǔn)中引入時(shí)間維度。時(shí)間維度的引入使學(xué)生更全面地體驗(yàn)現(xiàn)實(shí)工程的復(fù)雜性,體驗(yàn)到工程指標(biāo)不只是單一的技術(shù)層面,而是涉及多個(gè)維度的考量,如成本、時(shí)間、效率、可靠性等。
項(xiàng)目的工程實(shí)現(xiàn)及“過程與控制”模塊教學(xué)要點(diǎn)解析
1.項(xiàng)目分析、整體規(guī)劃及教學(xué)要點(diǎn)解析
(1)識(shí)別和定義功能需求。在此環(huán)節(jié),全體項(xiàng)目組成員要通過分析、討論來理解比賽規(guī)則,明確功能需求、得分標(biāo)準(zhǔn)。
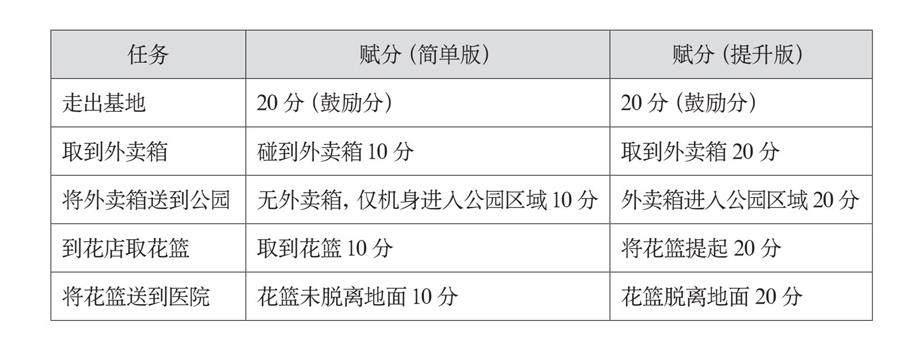
(2)子系統(tǒng)劃分。劃分子系統(tǒng)是工程實(shí)現(xiàn)的關(guān)鍵環(huán)節(jié),有助于任務(wù)分解和團(tuán)隊(duì)協(xié)作,不同的團(tuán)隊(duì)可能會(huì)生成不同的劃分方法,如有的項(xiàng)目組會(huì)劃分為傳感器子系統(tǒng)、控制子系統(tǒng)、機(jī)械結(jié)構(gòu)子系統(tǒng)(如下頁圖2),有的項(xiàng)目組會(huì)劃分為巡線子系統(tǒng)、轉(zhuǎn)彎子系統(tǒng)、任務(wù)動(dòng)作子系統(tǒng)等(如下頁圖3)。那么,哪種劃分方法更有利于工程實(shí)施呢?只有對(duì)各子系統(tǒng)內(nèi)部關(guān)鍵技術(shù)進(jìn)行初步設(shè)計(jì),才會(huì)發(fā)現(xiàn)圖2的劃分方法是不具可操作性的。
“過程與控制”模塊教學(xué)要點(diǎn)解析:①“面向任務(wù)”的思維方式。在工程項(xiàng)目中,任務(wù)導(dǎo)向的思維方式至關(guān)重要。第一種子系統(tǒng)劃分方法雖然看似條理清晰,但實(shí)際上難以執(zhí)行,因?yàn)樗腔谥R(shí)體系而非實(shí)際任務(wù)體系來劃分的。在教學(xué)過程中,教師應(yīng)引導(dǎo)學(xué)生轉(zhuǎn)變學(xué)習(xí)思維,培養(yǎng)他們聚焦具體問題、提出并實(shí)施解決方案的能力,幫助學(xué)生建立起以完成任務(wù)為核心的思維方式。②“分解與聯(lián)系”的系統(tǒng)化思維方式。在圖2子系統(tǒng)的劃分中,將識(shí)別直線和識(shí)別路口分開處理,忽略了它們之間的內(nèi)在聯(lián)系。為了培養(yǎng)學(xué)生綜合分析問題的能力,教師需要引導(dǎo)他們學(xué)會(huì)分解復(fù)雜任務(wù),并洞察各分解部分之間的內(nèi)在聯(lián)系。例如,在本項(xiàng)目中,任務(wù)可以初步分解為識(shí)別直線、走直線、識(shí)別路口、路口轉(zhuǎn)彎、取外賣箱(花籃)、攜帶外賣箱(花籃)、放置外賣箱(花籃)等多個(gè)環(huán)節(jié)。通過分析這些環(huán)節(jié),學(xué)生會(huì)發(fā)現(xiàn)識(shí)別直線和路口是完成其他環(huán)節(jié)的基礎(chǔ),而且識(shí)別直線和識(shí)別路口存在關(guān)聯(lián)。這種“分解與聯(lián)系”的分析方法有助于學(xué)生找到問題的突破口,并形成對(duì)任務(wù)進(jìn)行系統(tǒng)化分析的思維方式。
2.各子系統(tǒng)關(guān)鍵技術(shù)的工程實(shí)現(xiàn)及教學(xué)要點(diǎn)解析
(1)巡線子系統(tǒng)——測(cè)定閾值。正確設(shè)置傳感器的閾值至關(guān)重要,它可以保證傳感器能夠準(zhǔn)確地區(qū)分賽道和背景。通常的做法是在實(shí)際場(chǎng)景的不同位置進(jìn)行多次取值,然后分別對(duì)線路和背景上的讀數(shù)計(jì)算平均值,最終的閾值通常設(shè)置為這兩個(gè)平均值的中間點(diǎn)。例如,如果線路的平均讀數(shù)為100,背景的平均讀數(shù)為300,那么閾值可以設(shè)置為200。在閾值初步確定后,要將閾值應(yīng)用于機(jī)器人小車,測(cè)試小車在賽道上的表現(xiàn),觀察小車是否能夠準(zhǔn)確地識(shí)別和跟蹤賽道,如果表現(xiàn)不佳,則需要調(diào)整閾值。
“過程與控制”模塊教學(xué)要點(diǎn)解析:①培養(yǎng)精準(zhǔn)習(xí)慣。建議使用能夠返回模擬數(shù)據(jù)的巡線傳感器,這樣做的目的是培養(yǎng)學(xué)生的精準(zhǔn)習(xí)慣,精確的數(shù)據(jù)對(duì)控制系統(tǒng)穩(wěn)定性具有重要作用。②認(rèn)識(shí)干擾因素的存在及應(yīng)對(duì)方法。在閾值的確定方法上,上述方法是較好的選擇,可以最大程度減少誤識(shí)別,提高循跡系統(tǒng)的可靠性,但并不是唯一的方法。在確定閾值的方法上,教師要鼓勵(lì)學(xué)生自主探索。在教學(xué)實(shí)踐中,學(xué)生可能把接近軌跡線顏色的值作為閾值,這種做法常會(huì)受傳感器的敏感度、場(chǎng)地質(zhì)量、環(huán)境光等因素影響而發(fā)生誤識(shí)別。此環(huán)節(jié)的實(shí)踐體驗(yàn),使學(xué)生認(rèn)識(shí)到干擾問題,并拓展了應(yīng)對(duì)干擾的技術(shù)思想與方法。③增強(qiáng)實(shí)驗(yàn)操作能力。學(xué)生在確定采樣點(diǎn)數(shù)量和位置,以及測(cè)試閾值效果的過程中,需要細(xì)致地觀察、精準(zhǔn)地測(cè)量、準(zhǔn)確地記錄,以提升實(shí)驗(yàn)操作能力。④探究原理。教師應(yīng)鼓勵(lì)對(duì)技術(shù)有濃厚興趣的學(xué)生進(jìn)一步研究巡線傳感器的工作原理。
(2)巡線子系統(tǒng)——路徑識(shí)別及走直線算法。在起點(diǎn)先把機(jī)器人騎線放置,啟動(dòng)后如果兩側(cè)傳感器都未檢測(cè)到黑線(假設(shè)軌跡線顏色為黑),小車?yán)^續(xù)直行。如果單側(cè)傳感器檢測(cè)到黑線(如左側(cè)),則意味著小車未能維持直行,已經(jīng)偏右了,因此需要糾偏,在這種情況下,相應(yīng)的調(diào)整命令被下達(dá),使小車向相反方向(左)轉(zhuǎn)向,如具體指令為“向左轉(zhuǎn)1秒”。如果兩側(cè)傳感器都檢測(cè)到黑線,則表示小車已到路口,隨后可調(diào)用轉(zhuǎn)彎程序進(jìn)行處理(任務(wù)要求轉(zhuǎn)彎時(shí)),算法如下頁圖4所示。
“過程與控制”模塊教學(xué)要點(diǎn)解析:①適應(yīng)“機(jī)器思維”。在算法設(shè)計(jì)中,深藏著常規(guī)思維與機(jī)器思維的對(duì)比。通常學(xué)生會(huì)認(rèn)為識(shí)別直線比識(shí)別路口簡(jiǎn)單,但事實(shí)上對(duì)傳感器來說,識(shí)別路口更加直接,只需兩個(gè)傳感器均檢測(cè)到黑線即可;在未脫軌的情況下,傳感器“看到”的不是路口,就是直線,因此無需再單獨(dú)進(jìn)行一次直線識(shí)別,學(xué)生若按常規(guī)思維,將識(shí)別直線和識(shí)別路口割裂處理,并先去尋求識(shí)別直線,就會(huì)走到死胡,因?yàn)橛醚劬陀脗鞲衅鳌翱础钡姆绞绞遣煌摹Mㄟ^設(shè)計(jì)巡線算法,學(xué)生能夠深刻領(lǐng)悟到在自動(dòng)控制領(lǐng)域,解決問題需要依循機(jī)器思維,即根據(jù)設(shè)備(傳感器)的性能來尋求解決方案。②創(chuàng)新思維培養(yǎng)。當(dāng)某個(gè)任務(wù)(如識(shí)別直線)難以實(shí)現(xiàn)時(shí),教師應(yīng)鼓勵(lì)學(xué)生積極嘗試新的解決方案(如轉(zhuǎn)向?qū)α⒚妗R(shí)別路口),養(yǎng)成靈活和創(chuàng)新的思維方式。③體驗(yàn)反饋。在小車行進(jìn)中,傳感器實(shí)時(shí)反饋車身與線路的位置偏離關(guān)系,程序根據(jù)反饋回來的數(shù)據(jù),及時(shí)對(duì)偏離直線軌跡的情況進(jìn)行修正。與新課標(biāo)中提到的空調(diào)中傳感器進(jìn)行反饋不同的是,本項(xiàng)目反饋的是行進(jìn)中的動(dòng)態(tài)信息,而且是同時(shí)用兩個(gè)傳感器協(xié)同反饋偏離情況,豐富了學(xué)生對(duì)反饋的認(rèn)知。④認(rèn)識(shí)優(yōu)秀算法的重要性。自動(dòng)控制中的算法,需要結(jié)合設(shè)備性能、環(huán)境條件進(jìn)行設(shè)計(jì),優(yōu)秀的算法能夠更精準(zhǔn)地獲取反饋并實(shí)現(xiàn)控制。
(3)轉(zhuǎn)彎子系統(tǒng)——十字路口轉(zhuǎn)向180°。轉(zhuǎn)彎可以通過不同的方法來實(shí)現(xiàn),如:?jiǎn)蝹?cè)減速,即減慢一側(cè)輪子的速度使機(jī)器人向慢側(cè)轉(zhuǎn)彎;停止并轉(zhuǎn)向,即完全停止一側(cè)的輪子,而另一側(cè)繼續(xù)轉(zhuǎn)動(dòng)來實(shí)現(xiàn)更銳利的轉(zhuǎn)向。當(dāng)開始轉(zhuǎn)彎后,小車如何判斷轉(zhuǎn)彎結(jié)束呢?常用的方法是傳感器重新對(duì)準(zhǔn)機(jī)制,即判斷小車是否歸位在下一條待巡的線路上。可以借助抽象出來的車與線的位置關(guān)系模型圖對(duì)判斷條件進(jìn)行分析,根據(jù)分析設(shè)計(jì)的算法如圖5所示。
“過程與控制”模塊教學(xué)要點(diǎn)解析:①建模分析意識(shí)。對(duì)轉(zhuǎn)彎動(dòng)作結(jié)束條件的判定,可利用的信息包括傳感器數(shù)據(jù)、十字線、小車轉(zhuǎn)動(dòng)的實(shí)時(shí)位置,需要分析三者間的動(dòng)態(tài)關(guān)系。比較好的方法是抽象出小車、十字線的圖形,借此分析小車在轉(zhuǎn)彎的過程中形成的車與線的動(dòng)態(tài)位置關(guān)系,如下頁圖6所示。而這種位置關(guān)系的變化怎樣反饋給主控板呢?通過傳感器的數(shù)據(jù)就能找到問題的突破口,以此作為判斷條件,形成算法。經(jīng)歷這樣的分析過程,學(xué)生會(huì)認(rèn)識(shí)到對(duì)于動(dòng)態(tài)、復(fù)雜的事物,可以通過抽象建模的方式將問題分解和可視化,從而形成建模分析的意識(shí)。②綜合控制意識(shí)。要引導(dǎo)學(xué)生意識(shí)到轉(zhuǎn)彎動(dòng)作的實(shí)現(xiàn)是對(duì)兩個(gè)車輪同時(shí)進(jìn)行控制的綜合效果,對(duì)每個(gè)車輪的控制都包括“輸入—計(jì)算—輸出”三個(gè)環(huán)節(jié)。生活中一個(gè)控制效果的實(shí)現(xiàn),有可能是對(duì)多個(gè)對(duì)象進(jìn)行協(xié)同控制的結(jié)果,從而豐富學(xué)生對(duì)控制復(fù)雜性的理解。
(4)任務(wù)動(dòng)作子系統(tǒng)。本項(xiàng)目涉及的動(dòng)作任務(wù)包括從餐館取外賣箱攜帶至公園放下、從花店取花籃攜帶至醫(yī)院放下。為完成任務(wù),可在小車前端安裝類似手臂的裝置,如下頁圖7所示。攜帶外賣箱最簡(jiǎn)單的辦法是用“手臂”將其框住后直接拖帶;攜帶花籃最簡(jiǎn)單的方式是將“手臂”插入花籃孔后,直接拖帶。以上方案雖然簡(jiǎn)單,但容易產(chǎn)生外賣箱、花籃脫離控制的情況,優(yōu)化方案是:采用舵機(jī),把外賣箱舉起;在挑起花籃的時(shí)候,應(yīng)用舵機(jī)向上轉(zhuǎn)動(dòng)一定角度。這樣不但會(huì)解決脫離控制的問題,還可以提高小車攜帶物品后的行進(jìn)速度。
“過程與控制”模塊教學(xué)要點(diǎn)解析:①“優(yōu)化”意識(shí)培養(yǎng)。引入舵機(jī)作為對(duì)簡(jiǎn)單拖帶方式的優(yōu)化,可以使學(xué)生意識(shí)到不斷尋求更高效、更穩(wěn)定的解決方案的重要性,這是工程實(shí)踐中必不可少的部分。②體驗(yàn)真實(shí)工程的多因素制約。學(xué)生在選擇是否采用舵機(jī)優(yōu)化搭建時(shí),需要考慮舵機(jī)搭建和編程調(diào)試所需的時(shí)間成本。由于總得分=任務(wù)得分+時(shí)間得分,學(xué)生必須權(quán)衡使用簡(jiǎn)單方法節(jié)省時(shí)間和使用舵機(jī)提高穩(wěn)定性所帶來的效益對(duì)得分的影響,這樣的考量使學(xué)生意識(shí)到在做真實(shí)的工程項(xiàng)目時(shí),不能單純追求技術(shù)上的完善,還要綜合考慮多方面的制約因素。
綜上所述,課堂小型機(jī)器人工程項(xiàng)目為學(xué)生打造了一個(gè)貼近現(xiàn)實(shí)的科技實(shí)踐平臺(tái)。學(xué)生認(rèn)識(shí)到現(xiàn)實(shí)世界中的“控制”絕非理想狀態(tài),會(huì)受到眾多干擾因素的影響,從而意識(shí)到“控制”的復(fù)雜性,并深刻體驗(yàn)到科技工程的復(fù)雜性。在此過程中,學(xué)生不僅大膽嘗試了創(chuàng)新,而且經(jīng)歷了失敗的探索,在性能與成本的權(quán)衡中,在團(tuán)隊(duì)合作的思維碰撞中,以及在與其他團(tuán)隊(duì)的競(jìng)爭(zhēng)中不斷成長(zhǎng)。同時(shí),學(xué)生通過對(duì)“過程與控制”模塊基礎(chǔ)知識(shí)的學(xué)習(xí),進(jìn)一步發(fā)展了工程思維,豐富了技術(shù)思想與方法,如“面向任務(wù)”思維、“分解與聯(lián)系”的系統(tǒng)化思維、機(jī)器思維、建模分析的方法等。這樣充滿現(xiàn)實(shí)意義和挑戰(zhàn)的學(xué)習(xí)過程,使學(xué)生真切地感受到了學(xué)習(xí)的價(jià)值、探索的樂趣以及合作的重要性,增加了自我效能感,生發(fā)了運(yùn)用科技服務(wù)社會(huì)的理想。
參考文獻(xiàn):
[1]中華人民共和國(guó)教育部.義務(wù)教育信息科技課程標(biāo)準(zhǔn)(2022年版)[S].北京:北京師范大學(xué)出版社,2022.
[2]黃榮懷,熊璋.義務(wù)教育信息科技課程標(biāo)準(zhǔn)(2022年版)解讀[M].北京:北京師范大學(xué)出版社,2022.
[3]李鋒.新版課程標(biāo)準(zhǔn)解析與教學(xué)指導(dǎo)(2022年版)小學(xué)信息科技[M].北京:北京師范大學(xué)出版社,2022.
[4]熊璋,方其桂,許憬,等.義務(wù)教育過程與控制教學(xué)實(shí)施眾人談[J].中國(guó)信息技術(shù)教育,2023(09):5-10.
[5]鐘柏昌.“四位一體”的中小學(xué)機(jī)器人教育框架設(shè)計(jì)[J].教育研究與評(píng)論:技術(shù)教育,2014(04):52-58.