水下機器人耐壓艙的結構設計與分析
2024-06-27 22:03:41俞偉豪韓旭唐縱周陳炎
機電信息 2024年11期
關鍵詞:有限元
俞偉豪 韓旭 唐縱 周陳炎

摘要:水下機器人耐壓艙是確保機構整體在深水環境穩定工作、保護內部重要部件不受損壞的關鍵結構。鑒于此,以CCS潛水器入級規范為基礎,初步對耐壓艙進行結構設計,確定出關鍵部位的尺寸。基于有限元法對設計出的耐壓艙進行強度和剛度校核,確保其結構強度滿足要求。同時,考慮到耐壓艙在水中主要受到壓應力作用,對耐壓艙結構進行穩定性分析,保證結構在水下工作時不會發生失穩。結果表明,耐壓艙的強度及穩定性均滿足安全要求,該水下機器人的耐壓艙設計相對合理。
關鍵詞:水下機器人;耐壓艙;有限元;強度;穩定性
中圖分類號:TP242? ? 文獻標志碼:A? ? 文章編號:1671-0797(2024)11-0045-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.11.011
0? ? 引言
隨著深海資源的廣泛探索和開發,水下機器人在深水環境中的應用逐漸成為海洋工程領域的關鍵技術。其中,水下機器人的耐壓艙作為確保其在深水操作中穩定運行的關鍵結構,對機器人性能和內部關鍵組件的安全性至關重要[1]。水壓隨著機器人工作深度的增加會呈指數級增長,而超過一定深度后會對機器人系統產生巨大壓力甚至造成破壞。因此,耐壓艙的結構設計已經成為水下機器人工程中的關鍵一環。
水下機器人耐壓艙的結構樣式多種多樣,常見的有球形結構、圓柱形結構及多層結構等[2]。球形結構可以均勻分擔水壓力,相對于其他形式結構,其整體強度和穩定性較好。但球形結構會導致艙體內部空間利用率較低,能放置的儀器數量大大減少。圓柱形結構的強度和穩定性雖不及球形結構,但空間利用率較高,適合內部儀器較多的水下機器人[3]。多層結構通過增加層數來增強艙體的強度,形狀多種多樣,雖然各方面都優于球形和圓柱形,但制造成本較高。耐壓艙具體選用哪種結構形式,需要結合水下機器人的工作性質、工作環境及預算等多方面因素而定。
耐壓艙的設計不僅關系到水下機器人的靈活性和經濟性,更關系到機器人整體的安全性。目前,關于耐壓艙的結構設計,國內外專家和機構已取得了一些成果。王鵬飛等人[4]提出了一種基于有限元法的復合材料耐壓艙的結構設計方法,并用外壓試驗證明了該方法的準確性,彌補了國內復合材料耐壓艙設計的空白。Praba等人[5]設計出一種軍用加筋復合材料潛水器耐壓殼,利用LS-DYNA對耐壓殼進行了非線性動力響應數值分析,發現該種耐壓殼可以一定程度降低水下爆炸帶來的影響。包海默等人[6]以箱鲀為仿生對象,設計出一種水下捕撈機器人的仿生耐壓艙。利用數值分析驗證了該仿生耐壓艙相對于常規樣式耐壓艙阻力更小,水下運動更加靈活。
本文以CCS的《潛水系統和潛水器入級規范》[7]為基礎,初步得出水下機器人耐壓艙的形狀和構件尺寸。基于有限元法,利用ANSYS軟件對耐壓艙的強度和剛度進行校核,確保耐壓艙的結構強度滿足要求。同時,考慮到水下機器人在工作時耐壓艙主要負載為壓應力,為了防止耐壓艙出現失穩問題,影響水下機器人的整體安全,文章基于ANSYS的Buckling模塊對耐壓艙結構進行了屈曲分析,確保了耐壓艙的穩定性。
1? ? 耐壓艙殼體結構設計
本文設計的水下機器人最大潛入水深為200 m,此時耐壓艙承受的最大水壓力p=ρgh=1.96 MPa。但為了保證耐壓艙的安全性,耐壓艙的極限承載壓力需要在最大設計水壓力基礎上還留有一定的裕度。根據壓力容器設計規范規定,耐壓艙的極限承載壓力pm可以表示:
pm=ηgp(1)
式中:η為與機器人最大工作水深有關的安全系數,本文取1.5。
耐壓艙形狀的選擇與工作水深和內部儀器數量有關,目前市面上常見的形狀有圓柱形、球形、圓錐形等。根據文獻[8]的研究結論,在同一水深下,圓柱形和圓錐形耐壓殼所受的應力會小于圓柱形,穩定性也高于圓柱形。但近些年人們對海洋的開發和探索已經從淺海走向深海,而隨著水深的增加,耐壓艙內部的儀器也需要調整為相應的合理配置,深海任務通常需要更多的傳感器和設備來適應極端的水下環境。針對上述情況,內部空間利用率更高、能安置儀器數量更多的圓柱形耐壓艙往往受到設計人員的青睞。本文也選用圓柱形作為設計耐壓艙的形狀,依據圓柱形殼體小撓度理論,圓柱耐壓艙的壁厚t可以根據下式計算:
t=D0.6
(2)
式中:D為耐壓殼的外徑;Pcr為臨界失穩壓力;L為耐壓殼的長度;E為耐壓艙周向的平均彈性模量。
為滿足強度要求,耐壓艙內部會設計加強筋,加強筋的設計形式有縱向式和周向式兩種。縱向式加強筋雖然使耐壓艙整體更加穩定,但會一定程度影響到內部放置儀器的空間。從空間利用率角度出發,本文在耐壓艙內殼設計4根周向加強筋。圖1為水下機器人耐壓艙三維模型示意圖。
2? ? 耐壓艙強度校核
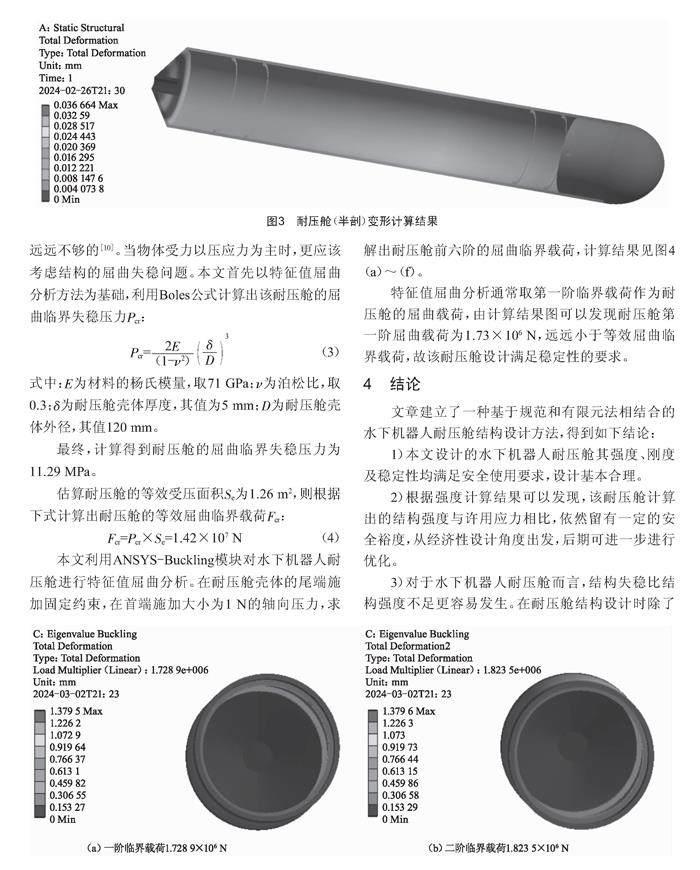
耐壓艙作為水下機器人的儀器放置艙,其結構安全對于整個水下機器人非常重要。文章首先對設計的耐壓艙強度進行校核,檢驗其強度是否滿足安全要求。利用有限元通用軟件ANSYS對耐壓艙進行靜強度和剛度的計算。耐壓艙有限元網格采用Solid186單元,該網格單元精度較高[9]。約束條件參考CCS的《潛水系統和潛水器入級規范》,對耐壓艙縱中剖面施加對稱面約束,側面施加三個方向的位移約束。施加外載為耐壓艙的極限承載壓力(200 m水下作業深度)。圖2和圖3分別為耐壓艙的靜強度和變形計算結果。
本文采用的材料為6061-T6鋁合金,其屈服強度為275 MPa。依據CCS規范,結構安全系數取0.8,則該耐壓艙的許用應力為[σ]=0.8σs=220 MPa。從仿真結果可以看出,本文設計的耐壓艙最大應力為103 MPa,該值遠遠小于耐壓艙的許用應力值,故設計的耐壓艙強度滿足安全要求。設計的耐壓艙最大變形量為0.036 7 mm,6061-T6鋁合金材料的延伸率在10%~15%,故設計的耐壓艙剛度也在許可范圍之內。
3? ? 耐壓艙穩定性分析
水下機器人在水下工作時,耐壓艙更多地受到壓應力的作用,僅僅對耐壓艙進行結構強度校核是遠遠不夠的[10]。當物體受力以壓應力為主時,更應該考慮結構的屈曲失穩問題。本文首先以特征值屈曲分析方法為基礎,利用Boles公式計算出該耐壓艙的屈曲臨界失穩壓力Pcr:
Pcr=
(3)
式中:E為材料的楊氏模量,取71 GPa;ν為泊松比,取0.3;δ為耐壓艙殼體厚度,其值為5 mm;D為耐壓艙殼體外徑,其值120 mm。
最終,計算得到耐壓艙的屈曲臨界失穩壓力為11.29 MPa。
估算耐壓艙的等效受壓面積Se為1.26 m2,則根據下式計算出耐壓艙的等效屈曲臨界載荷Fcr:
Fcr=Pcr×Se=1.42×107 N (4)
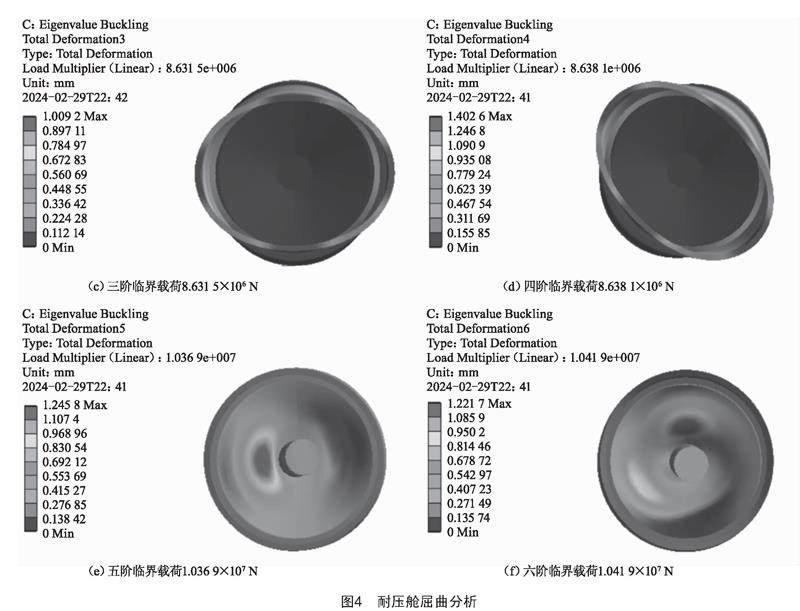
本文利用ANSYS-Buckling模塊對水下機器人耐壓艙進行特征值屈曲分析。在耐壓艙殼體的尾端施加固定約束,在首端施加大小為1 N的軸向壓力,求解出耐壓艙前六階的屈曲臨界載荷,計算結果見圖4(a)~(f)。
特征值屈曲分析通常取第一階臨界載荷作為耐壓艙的屈曲載荷,由計算結果圖可以發現耐壓艙第一階屈曲載荷為1.73×106 N,遠遠小于等效屈曲臨界載荷,故該耐壓艙設計滿足穩定性的要求。
4? ? 結論
文章建立了一種基于規范和有限元法相結合的水下機器人耐壓艙結構設計方法,得到如下結論:
1)本文設計的水下機器人耐壓艙其強度、剛度及穩定性均滿足安全使用要求,設計基本合理。
2)根據強度計算結果可以發現,該耐壓艙計算出的結構強度與許用應力相比,依然留有一定的安全裕度,從經濟性設計角度出發,后期可進一步進行優化。
3)對于水下機器人耐壓艙而言,結構失穩比結構強度不足更容易發生。在耐壓艙結構設計時除了要考慮靜強度問題,還必須考慮結構的穩定性。
[參考文獻]
[1] LI B,WANG L,WANG X F,et al.Cross-coupling effect and motion control of an autonomous underwater vehicle with internal actuators[J].Journal of Marine Science and Technology,2019,24:98-110.
[2] 楊書麟.水下機器人耐壓艙結構設計及優化[D].贛州:江西理工大學,2020.
[3] 楊洋,祁敏,董蘇德,等.海洋牧場水下巡檢機器人耐壓艙力學特性分析[J].南方農機,2022,53(2):54-56.
[4] 王鵬飛,江亞彬,宋江,等.深海用復合材料耐壓殼體結構設計方法研究[J].復合材料科學與工程,2020(11):49-53.
[5] PRABA R P S,RAMAJEYATHILAGAM R.Microstructural damage and response of stiffened composite submersible pressure hull subjected to underwater explosion[J].Ships and Offshore Structures,2023,18(8):1116-1131.
[6] 包海默,馬宏宇,喬松,等.水下捕撈機器人耐壓艙仿生造型設計[J].機械設計,2022,39(5):135-141.
[7] 中國船級社.潛水系統和潛水器入級規范[R],2021.
[8] 裴蕾.模塊化水下機器人設計及力學分析[D].西安:西安工業大學,2018.
[9] 姜少杰,夏長春,孫鵬飛,等.某水下捕撈機器人的結構設計及水動力學分析[J].制造業自動化,2020,42(5):61-66.
[10] 張洪彬,徐會希,陳仲.水下機器人耐壓艙優化設計與結構分析[J].海洋學研究,2018,36(3):84-88.
收稿日期:2024-03-07
作者簡介:俞偉豪(2001—),男,江蘇揚州人,研究方向:海洋結構物結構設計。
通信作者:周陳炎(1993—),男,江蘇南通人,碩士,講師,研究方向:強度可靠性分析。
基金項目:江蘇省大學生創新創業訓練計劃項目(202312056043Y);江蘇省高校自然科學研究面上項目(23KJD580004)
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
