面向自動緊急制動功能測試的目標物移動平臺設計
2024-06-20 04:22:13徐傳康曲衛東于丹王雪峰武湘成程學玲
汽車工程師 2024年6期
徐傳康 曲衛東 于丹 王雪峰 武湘成 程學玲
【摘要】為實現車輛自動緊急制動(AEB)系統功能測試中目標物移動平臺的開發,針對移動平臺進行了構型設計、強度分析、疲勞壽命估計、測試場景路徑跟蹤等研究。通過對《C-NCAP管理規則(2024年版)》規定的測試場景進行分析,提取目標物運動路徑,根據邊界條件得到期望軌跡,再通過動力學仿真得到軌跡跟蹤結果。經過對比,仿真結果與規定要求基本一致,表明設計的移動平臺能夠滿足AEB系統功能測試需求。
關鍵詞:自動緊急制動系統測試 移動平臺 結構強度
中圖分類號:U461.91? ?文獻標志碼:A? ?DOI: 10.20104/j.cnki.1674-6546.20240136
Design of Target Object Mobile Platform for AEB Testing
Xu Chuankang1, Qu Weidong2, Yu Dan3, Wang Xuefeng2, Wu Xiangcheng2, Cheng Xueling2
(1. Equipment Industry Development Center of the Ministry of Industry and Information Technology, Beijing 100017; 2. Jilin University, Changchun 130000; 3. Changchun Automobile Testing Center Co., Ltd., Changchun 130011)
【Abstract】In order to develop the target object mobile platform for vehicle Automatic Emergency Braking (AEB) system test, this article studied the configuration design, strength analysis, fatigue life estimation and path tracking of test scene. Through the analysis of the test scenarios stipulated in C-NCAP Management Regulation (2024 Edition), the moving path of the target was extracted, and the expected trajectory was obtained according to the boundary conditions, then the trajectory tracking results were obtained through dynamic simulation. The comparison shows that the simulation results are basically consistent with the specified requirements, indicating that the designed mobile platform can meet the needs of AEB testing.
Key words: Autonomous Emergency Braking (AEB) system test, Moving platform, Structural strength
【引用格式】徐傳康, 曲衛東, 于丹, 等. 面向自動緊急制動功能測試的目標物移動平臺設計[J]. 汽車工程師, 2024(6): 8-13.
XU C K, QU W D, YU D, et al. Design of Target Object Mobile Platform for AEB Testing[J]. Automotive Engineer, 2024(6): 8-13.
1 前言
自動緊急制動(Autonomous Emergency Breaking,AEB)系統[1]是在存在碰撞風險的情況下,主動控制車輛進行緊急制動以避免或減輕碰撞,從而保護乘員及行人的主動安全系統,可有效降低事故發生概率[2-3]。AEB系統功能測試是檢測其功能完整性和有效性的重要環節,為了對不同車型配備的AEB系統功能的有效性進行標準化和統一化的評價,全球各個國家和地區相繼出臺了汽車AEB系統測試相關規程。2013年,國際標準化組織(International Organization for Standardization,ISO)制定了車輛碰撞預警系統測試標準;2014年,歐洲新車安全評鑒協會(the European New Car Assessment Programme,Euro NCAP)采用歐洲車輛目標物(Euro NCAP Vehicle Target,EVT)作為標準的測試目標物,進行AEB系統防碰撞功能測試[4]。2018年,《C-NCAP管理規則(2018年版)》納入了針對行人、電動自行車的汽車AEB系統測試。
目前,車輛AEB系統功能測試的方法一般為:選取封閉道路作為測試場地,利用移動平臺承載目標物按照預定軌跡行駛,模擬不同的碰撞場景開展AEB系統功能測試。考慮到AEB系統測試過程中存在車輛撞擊目標物并碾壓移動平臺的情況,移動平臺的設計以扁平化為主。同時,由于各評價規程對目標物的移動軌跡和速度進行了嚴格要求,移動平臺必須具備良好的軌跡跟蹤和速度控制能力。早期的移動平臺通常采用繩索或車輛牽引的方式控制目標物的移動軌跡和速度。繩索牽引的方式能夠模擬的場景有限,通常是直線行駛工況。車輛牽引的方式對牽引車輛的速度和軌跡控制要求較高,同時存在一定的安全隱患。為了解決該問題,AB Dynamics公司[5]開發了新一代移動底盤,具備軌跡規劃、軌跡跟蹤等自動行駛能力,擺脫了對牽引繩索和牽引車輛的依賴,然而,其在使用過程中仍然存在耐用性、國內法規適應性以及產品成本等問題。因此,根據《C-NCAP管理規則(2024年版)》的測試需求,針對性地開發能夠全面覆蓋相關測試場景的AEB系統測試超平移動底盤,對我國AEB系統測試體系的完善具有積極意義。
鑒于此,本文針對目標物移動平臺進行開發。首先進行結構設計,提出總體構型和各部件布置方式;其次,對移動平臺的主要受力結構(外車架)進行強度校核,并根據外車架的最終優化結果進行使用壽命預測;最后對測試場景的路徑規劃與跟蹤開展研究,提取測試軌跡并進行仿真驗證,以期為相關產品的開發提供借鑒。
2 總體結構設計
2.1 總體結構方案
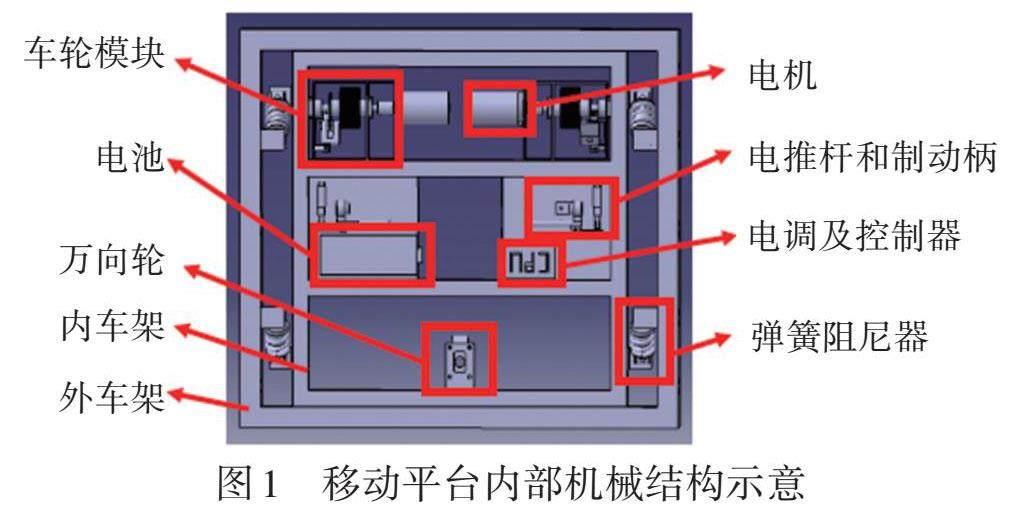
AEB系統測試移動平臺的主要功能是承載各種目標物沿規定的軌跡進行一定速度的移動,同時,平臺結構應具備一定的抗壓能力。為滿足上述要求,采用雙層車架結構,如圖1所示。內車架連接內部各機構,外車架承受外部載荷,前置兩輪驅動,采用輪邊電機驅動,后置一輪從動。內車架主要用于安裝車輪和保護移動平臺內部的組件,如電池、電機、控制器等,框架由截面為60 mm×30 mm、厚度為2 mm的矩形鋁管焊接而成。
外車架的最主要功能為安裝目標物以及作為碾壓工況下的承壓結構。移動平臺承載目標物正常行駛時,彈簧阻尼器支撐起外車架,此時外車架不妨礙運動,只用于安裝目標物;碾壓工況發生后,彈簧阻尼器收縮,外車架下降到地面上,由外車架作為移動平臺的支撐結構,防止過大的壓力作用到車輪上。外車架包括框架主體和帶有焊接支撐柱的蓋板,框架主體由截面尺寸為80 mm×40 mm、厚度為3 mm的矩形鋁管焊接而成,帶焊接支撐柱的蓋板為厚度2 mm的鋼板。移動平臺的主要參數如表1所示。
2.2 外車架有限元分析
對外車架進行分析,以保證碾壓工況下其強度滿足要求且產生的總變形對內部結構沒有運動干涉。考慮到常見乘用車的整車質量為約2 000 kg,部分乘用車的質量達到2 600 kg,移動平臺被碾壓時承受整車質量的約1/4,因此取7 500 N作為外車架最大承受壓力,得到外車架靜力學分析結果,如圖2所示。
由仿真結果可知,外車架最大應力為224.6 MPa,小于材料許用應力,車架強度滿足要求,但總變形量較大,最大變形量為9.77 mm,可能與電池等部件位置發生干涉。對外車架進行優化,根據應力集中位置增加支撐柱,仿真結果如圖3所示,優化后車架最大應力為102.7 MPa,小于材料許用應力,滿足強度要求,最大變形量為0.92 mm,與內部結構無干涉。
3 疲勞壽命分析
車輛AEB系統測試時,移動平臺可能受到反復碾壓,作用于移動平臺的力反復加載和卸載,產生交變應力,可將一個碾壓過程視為一個載荷循環周期,需對其進行疲勞損傷評估。
疲勞損傷評估方法主要分為基于應力-壽命曲線(S-N曲線)的評估方法[6]和基于線彈性斷裂力學(Linear Elastic Fracture Mechanics,LEFM)的評估方法。在移動平臺的疲勞損傷評估中,基于LEFM的評估方法不易使用,故本文采用基于S-N曲線的評估方法,以Palmgren-Miner(P-M)線性損傷累計準則[7-8]為基礎進行移動平臺疲勞損傷的評估。
假定在某種循環恒幅載荷工況下,移動平臺所能承受載荷循環的次數為N,每經歷一次相同的載荷循環,就會產生1/N的損傷。移動平臺受到ni次i級應力水平的循環載荷作用后,累計產生的損傷為Di=ni/Ni,其中,Ni為第i級載荷下的可循環次數。當移動平臺受到多種不同幅值的循環載荷時,累計的疲勞損傷D為所有載荷的循環比之和:
[D=ni Ni] (1)
根據上述P-M線性疲勞累積損傷理論,一般認為在多級不同應力幅值作用下,疲勞破壞發生時,有:
[ni Ni=1] (2)
計算疲勞壽命時,每次疲勞損傷記為Di。
外車架是移動平臺產生疲勞破壞可能性最大的部位,故移動平臺疲勞壽命估計時,主要對外車架的疲勞壽命進行預測。以外車架承受垂直載荷7 500 N為例,對外車架的使用壽命進行仿真計算,結果如圖4所示。
移動平臺在該工況下的使用壽命為69 172次。n次碾壓的疲勞損傷為:
D=n/69 172 (3)
剩余使用壽命為:
L=(1-n/69 172)×100% (4)
該工況下移動平臺承受的外部載荷可視為汽車AEB系統測試過程中移動平臺能夠承受的最大載荷,故對移動平臺進行健康度評估時,以該工況為基礎預測剩余使用次數,如表2所示。
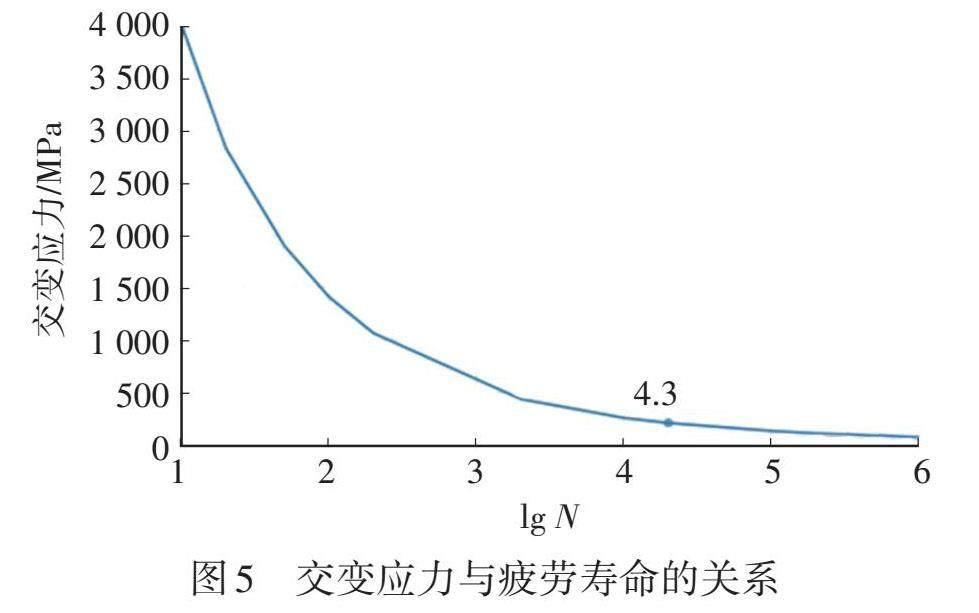
根據S-N曲線,交變應力與疲勞破壞前的循環次數的關系如圖5所示。因此,根據碾壓產生的應力,可計算每次碾壓后的疲勞損傷,從而實現剩余使用壽命的實時預測。
4 AEB系統測試路徑軌跡規劃
《C-NCAP管理規則(2024年版)》中規定了行人自動緊急制動和二輪車自動緊急制動等測試場景[9],為滿足測試要求,對各測試場景下的移動平臺行駛軌跡規劃進行研究。
4.1 行人自動緊急制動系統測試
行人自動緊急制動系統測試場景含有多個測試場景,本文具體對其中的車輛碰撞縱向行走的行人(Car-to-Pedestrian Longitudinal Adult 25%,CPLA-25)和車輛碰撞遠端成年行人(Car-to-Pedestrian Farside Adult with Obstruction 25%,CPFAO-25)場景進行路徑軌跡規劃分析。
4.1.1 CPLA-25場景
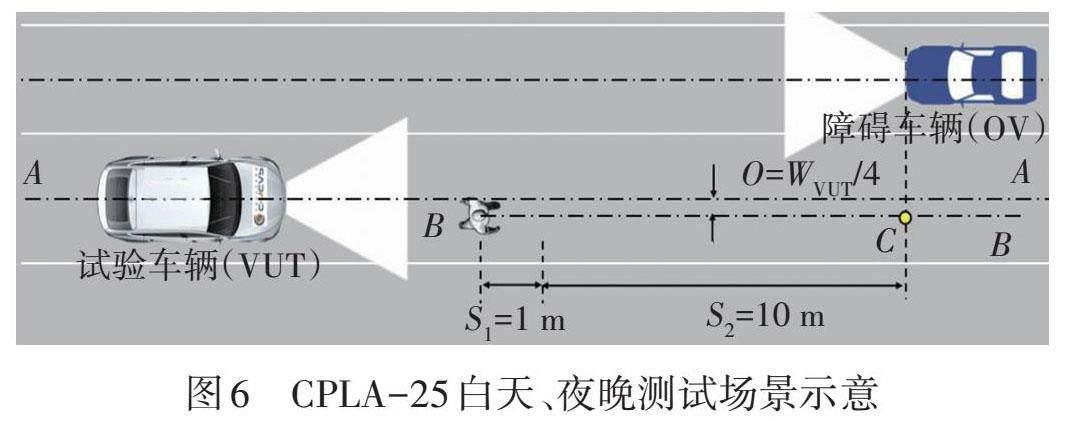
CPLA-25場景如圖6所示,其中行人的移動速度為5 km/h。
根據圖6中的條件,移動平臺直線行駛,從B點出發,在距離S1內完成加速,勻速行駛過距離S2,到達C點后完成測試,減速停車。因此,設置移動平臺的運動方式為:由靜止開始做勻加速運動,再做勻速運動,最后勻減速運動到靜止。以移動平臺初始位置車頭朝向為x軸正方向,設t時刻移動平臺在x方向上的位移為x(t)、速度為[xt]、加速度為[xt],初始條件為x(0)=0、[x0]=0、[x0]=0,軌跡規劃仿真結果如圖7所示。
由圖7可知,加速距離為0.982 m,滿足要求,勻速運動距離10 m、勻速運動速度5 km/h與測試規定基本一致。
4.1.2 CPFAO-25場景
CPFAO-25場景如圖8所示,其中行人的移動速度為6.5 km/h。經圖像對比,CPFAO-25、車輛左轉碰撞遠端成年行人(Car-to-Pedestrian Left Turning Farside Adult,CPTA-LF)、車輛右轉碰撞遠端成年行人(Car-to-Pedestrian Right Turning Farside Adult,CPTA-RF)測試場景對承載目標物的移動平臺要求一致,故采取相同測試軌跡。
根據圖8中的條件,移動平臺直線行駛,從初始位置出發,首先在距離S2內完成加速,進而勻速行駛過距離(S1-S2),到達C點后完成測試,減速停車。因此同理,設置移動平臺的運動方式為:由靜止開始做勻加速運動,再做勻速運動,最后勻減速運動到靜止。設置初始條件為x(0)=0、[x](0)=0、[x](0)=0,軌跡規劃結果如圖9所示。
由圖9可知,加速距離1.5 m滿足要求,勻速運動距離4.5 m、勻速運動速度6.5 km/h與測試規定基本一致。此外,仿真過程中的轉矩和轉速在驅動電機工作范圍內,因此提取的軌跡可以作為測試軌跡。
4.2 二輪車自動緊急制動系統測試
二輪車自動緊急制動系統測試含有多個測試場景。本文具體對其中的車輛碰撞縱向行駛電動自行車(Car-to-electric Bicyclist Longitudinal Adult 25%,CBLA-25)和車輛碰撞近端電動自行車(Car-to- electric Bicyclist Near side Adult with Obstruction 50%,CBNAO-50)測試場景的軌跡規劃進行具體分析。
4.2.1 CBLA-25場景
CBLA-25場景如圖10所示,其中電動自行車行駛速度為15 km/h。
根據圖10中的條件,移動平臺直線行駛,從起始點出發,在距離S1內完成加速,勻速行駛過距離S2,到達C點后完成測試,減速停車。因此,設置移動平臺的運動方式為:由靜止開始做勻加速運動,再做勻速運動,最后勻減速運動到靜止。設置初始條件為x(0)=0、[x](0)=0、[x](0)=0,軌跡規劃結果如圖11所示。
由圖11可知,加速距離6 m滿足要求,勻速運動距離10 m、勻速運動速度15 km/h與測試規定基本一致,仿真過程中的轉矩和轉速在驅動電機工作范圍內,因此提取的軌跡可以作為測試軌跡。
4.2.2 CBNAO-50場景
CBNAO-50場景如圖12所示,其中電動自行車行駛速度為15 km/h。
根據圖12中的條件,移動平臺直線行駛,該場景對加速距離沒有要求,移動平臺在到達測試起始點時已經滿足速度要求,設置加速距離為6 m。從測試起始點出發,在距離S1內勻速行駛到達C點完成測試,減速停車。因此,設置移動平臺的運動方式為:在起始點前做勻加速運動,到達起始點后開始做勻速運動,最后勻減速運動到靜止。設置初始條件為x(0)=0、[x](0)=0、[x](0)=0,軌跡規劃仿真結果如圖13所示。
由圖13可知,加速距離6 m滿足要求,勻速運動距離15 m、勻速運動速度15 km/h與測試規定基本一致。此外,仿真過程中的轉矩和轉速在驅動電機工作范圍內,因此提取的軌跡可以作為測試軌跡。
5 結束語
本文面向車輛AEB系統功能測試需求,進行了目標物移動平臺結構設計與運動規劃等研究。首先,進行了移動平臺的整體方案設計,根據測試需求確定平臺的主要設計參數,然后進行整車布置,并針對移動平臺結構強度進行了有限元分析與結構優化。在此基礎上,進一步開展了移動平臺路徑規劃研究,結合《C-NCAP管理規則(2024年版)》相關規定,針對行人自動緊急制動系統與二輪車自動緊急制動系統測試工況進行了移動平臺軌跡規劃計算,結果表明,所設計的移動平臺能夠滿足系統功能測試需求。
參考文獻
[1] WADA T, TSURU N, ISAJI K, et al. Characterization of Expert Drivers Last-Second Braking and Its Application to a Collision Avoidance System[J]. Intelligent Transportation Systems, IEEE Transactions, 2010, 11(2): 413-422.
[2] SEARSON D J, ANDERSON R W G. Integrated Assessment of Pedestrian Head Impact Protection in Testing Secondary Safety and Autonomous Emergency Braking[J]. Accident Analysis and Prevention, 2014, 63(2): 1-8.
[3] FILDES B, KEALL M, BOS N, et al. Effectiveness of Low-Speed Autonomous Emergency Braking in Real-World Rear-End Crashes[J]. Accident Analysis and Prevention, 2015, 81: 24-29.
[4] Euro NCAP. On the Road with Autonomous Emergency Braking Systems [EB/OL]. (2013-10-29) [2024-4-1]. https://www.euroncap.com/en/press-media/press-releases/on-the-road-with-autonomous-emergency-braking-systems/.
[5] AB Dynamics. AB Dynamics Automotive Toolchain Enables Scenarios and Data to Be Shared Between Virtual and Real-World Testing Seamlessly[EB/OL]. [2024-04-15]. https://www.abdynamics.com/en/.
[6] 嚴格格. 基于主S-N曲線法的含缺陷焊縫的疲勞壽命研究[D]. 長春: 吉林大學, 2020.
YAN G G. Research on Fatigue Life of Defective Welds Based on Master S-N Curve Method[D]. Changchun: Jilin University, 2020.
[7] PALMGREN A. Life Length of Roller Bearings or Durability of Ball Bearings[J]. Journal of the Association of German Engineers, 1924, 68: 339-341.
[8] CIAVARELLA M, D'ANTUONO P, PAPANGELO A. On the Connection between Palmgren‐Miner Rule and Crack Propagation Laws[J]. Fatigue & Fracture of Engineering Materials & Structures, 2018, 41(7): 1469-1475.
[9] 中國汽車技術研究中心有限公司. C-NCAP管理規則(2024年版)[S]. 天津: 中國汽車技術研究中心有限公司, 2023.
China Automotive Technology and Research Center Co., Ltd.. C-NCAP Management Regulation (2024 Edition)[S]. Tianjin: China Automotive Technology and Research Center Co., Ltd., 2023.
(責任編輯 斛 畔)
修改稿收到日期為2024年4月15日。