不平衡電網下雙dq坐標變換的M3C微分平坦控制策略
2024-06-06 00:00:00程啟明杜婷偉賴宇生
電機與控制學報 2024年1期
摘 要:
針對目前模塊化多電平矩陣變換器(M3C)研究中常用的雙αβ 坐標變換解耦不徹底、傳統PID控制方法效果差、不平衡工況研究少等問題,在分析拓撲結構和數學模型的基礎上,采用雙dq坐標變換對電氣量進行解耦,建立了M3C的輸入輸出側數學模型,分別對電壓、電流進行正負序分離,并結合微分平坦理論,推導了輸入側、輸出側的微分平坦控制(DFC),最后模擬了兩種不平衡工況下的運行情況。仿真結果表明,與線性PID控制相比,非線性的微分平坦控制提高了內環電流的跟蹤速度和精度,更適用于非線性的M3C系統。在電網平衡或電網出現不對稱故障時,微分平坦控制下M3C系統的動態穩定性與快速性更好,電能質量更高,電流諧波含量最多可以降低142%,能夠更有效地抑制負序電流。
關鍵詞:海上風力發電;模塊化多電平矩陣變換器;不平衡電網;雙dq坐標變換;微分平坦控制;PID控制
DOI:10.15938/j.emc.2024.01.005
中圖分類號:TM762
文獻標志碼:A
文章編號:1007-449X(2024)01-0049-12
Differential flatness control strategy of modular multilevel matrix converter based on double dq coordinate transformation under unbalanced grid conditions
CHENG Qiming,"DU Tingwei,"LAI Yusheng
(College of Automation Engineering, Shanghai University of Electric Power, Shanghai 200090, China)
Abstract:
Aiming at the problems of incomplete decoupling of double αβ coordinate transformation commonly used in modular multilevel matrix converter (M3C) research, on the basis of the analysis of topological structure and mathematical model, poor effect of traditional PID control method, and little research on unbalanced working conditions, etc., double dq coordinate transformation was adopted to decouple the electrical quantity. The mathematical model of M3C’s input and output side was established, the voltage and current were separated in positive and negative order, and the differential flatness control (DFC) of the input side and the output side was derived by combining the differential flatness theory. Finally, the operation under two unbalanced conditions was simulated. Compared with linear PID control, the simulation results show that nonlinear differential flat control improves the tracking speed and accuracy of inner loop current, and is more suitable for nonlinear M3C system. When the power grid balance or asymmetric fault occurs, M3C system under differential flat control has better dynamic stability and rapidity, higher power quality, and can suppress negative sequence current more effectively. The current THD can be reduced by up to 1.42%.
Keywords:offshore wind power; modular multilevel matrix converter; unbalanced grid; double dq coordinate transformation; differential flatness control; PID control
0 引 言
隨著氣候變暖、環境惡化等導致能源危機,新型清潔能源已成為了國家經濟發展的方向之一[1-2]。其中海上風電由于具備穩定性強、可再生、受環境影響小等優勢,極具開發前景。但如何將海上發電廠并入主電網正成為國內外海上風電領域的研究重點[3-4]。與常規的50 Hz的高壓交流輸電[5]和高壓直流輸電[6]相比,50/3 Hz的低頻交流輸電,又稱分頻傳輸系統,具有顯著優勢:可以提高交流海纜輸電能力,只需一個AC/AC換流站,且設備投資成本少[7-9]。
在現有的AC/AC變換設備中,模塊化多電平矩陣變換器(modular multilevel matrix converter,M3C)[10]由Erickson R和AI"Naseem O于2001年提出,作為直接AC/AC變換器具有高電壓、大容量的優點。M3C拓撲由9條橋臂構成,以3×3矩陣形式排布,每條橋臂的電壓、電流分量均包含兩種不同頻率的交流分量,存在強耦合現象,控制難度大。目前國內外學者已經對M3C的控制策略開展了一些研究,最為普遍應用的是基于雙αβ0坐標變換的解耦控制方法。文獻[11]的αβ0變換方法僅能將M3C的輸入電流和輸出電流解耦。文獻[12-14]提出雙αβ0變換,能將橋臂電流中的輸入電流、輸出電流和環流完全解耦,同時增加了兩個對角維度的平衡控制,控制橋臂能量均衡分布。文獻[15]將預測控制用于M3C中,然而M3C包含大量的狀態變量,導致參數復雜、計算量龐大不具有實用性。文獻[16-17]研究了雙αβ0變換的非線性無源控制和微分平坦控制,系統跟蹤速度有很大提升。盡管雙αβ0變換被廣泛采納,但是這種控制方案也存在缺點,其被控量都是交流量,物理概念易混淆,且功率分量計算復雜。文獻[18]提出了雙dq坐標變換的方法,采用直流量作為內環被控量,但其采用的PID控制不僅調參復雜,而且是線性控制方法,作用在非線性的M3C上并不能使系統迅速穩定。到目前為止,采用雙dq解耦方法的研究較少,并且其中未有文獻考慮在發生不平衡故障時的非線性控制方案。非線性的微分平坦控制(differential flatness control,DFC)對系統穩定性的提升,超調量的降低等方面頗具優勢,在電力電子領域和清潔能源領域已成為了研究熱點[19-20]。與線性PID控制相比,DFC控制能使M3C系統穩定運行,避免因內外部擾動而發生動態特性變差的現象,提高內環電流的跟蹤速度和精度。
本文首次提出在不平衡電網下將微分平坦控制策略應用到基于雙dq坐標變換的M3C控制中。首先給出M3C的拓撲結構與工作原理,建立M3C在雙dq坐標變換下的數學模型,然后在輸入側與輸出側出現不對稱故障時,將電壓電流正負序分離,進一步運用微分平坦理論,設計輸入側、輸出側的DFC控制器。最后,在MATLAB/Simulink平臺上建立兩種不平衡工況,分別模擬DFC控制和傳統PID控制,通過仿真驗證在電網電壓不平衡條件下,采用DFC控制能使系統穩定運行,且效果優于傳統PID控制。
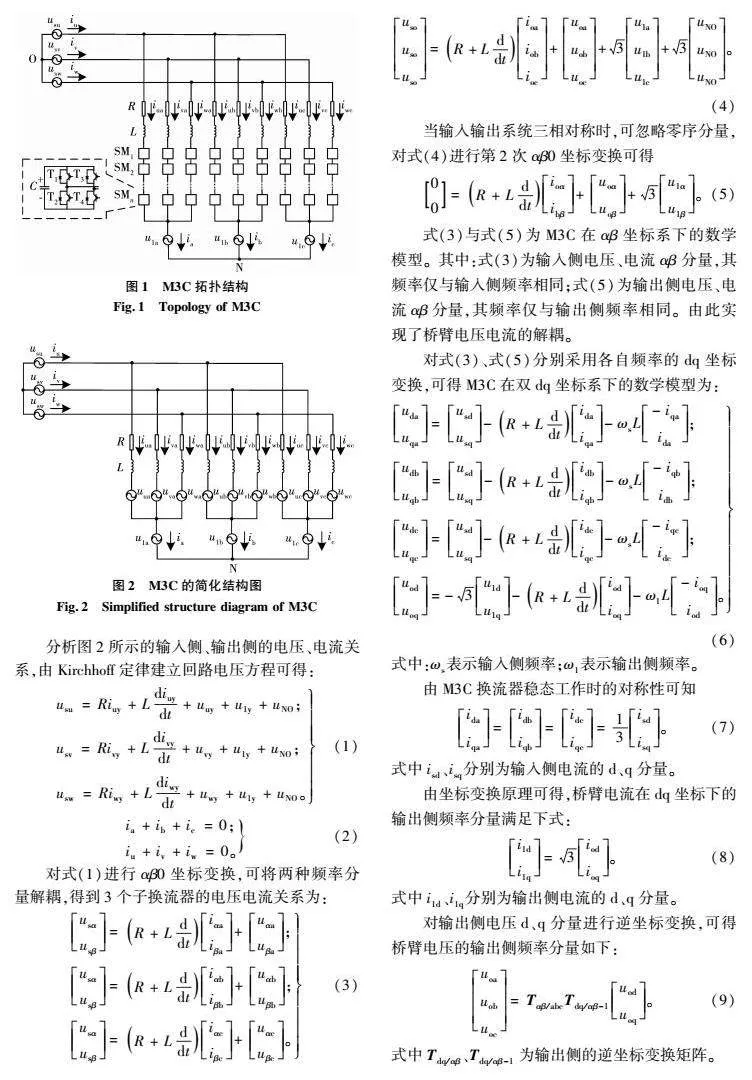
1 M3C的電路結構及數學模型
M3C變換器的主電結構如圖1所示。M3C以H全橋子模塊(用SM表示,由T1~T4 4個IGBT和1個電容組成)為基本單元,等效電阻R、電感L以及n個子模塊級聯構成1個換流橋臂,共有9個橋臂,可分為3個子換流器。M3C的輸入側是低頻三相交流電源,輸出側是工頻三相交流電源。
圖1中:輸入側交流電壓為usu、usv、usw,電流為iu、iv、iw;輸出側交流電壓為u1a、u1b、u1c,電流為ia、ib、ic;橋臂電流為ixy,橋臂總電容電壓為ucxy(x=u、v、w,y=a、b、c),uNO為共模電壓。可以將每個橋臂的子模塊視為受控電壓源,得到圖2所示的簡化結構圖。
分析圖2所示的輸入側、輸出側的電壓、電流關系,由Kirchhoff定律建立回路電壓方程可得:
對式(1)進行αβ0坐標變換,可將兩種頻率分量解耦,得到3個子換流器的電壓電流關系為:
當輸入輸出系統三相對稱時,可忽略零序分量,對式(4)進行第2次αβ0坐標變換可得
式(3)與式(5)為M3C在αβ坐標系下的數學模型。其中:式(3)為輸入側電壓、電流αβ分量,其頻率僅與輸入側頻率相同;式(5)為輸出側電壓、電流αβ分量,其頻率僅與輸出側頻率相同。由此實現了橋臂電壓電流的解耦。
對式(3)、式(5)分別采用各自頻率的dq坐標變換,可得M3C在雙dq坐標系下的數學模型為:
式中:ωs表示輸入側頻率;ω1表示輸出側頻率。
由M3C換流器穩態工作時的對稱性可知
式中isd、isq分別為輸入側電流的d、q分量。
由坐標變換原理可得,橋臂電流在dq坐標下的輸出側頻率分量滿足下式:
式中i1d、i1q分別為輸出側電流的d、q分量。
對輸出側電壓d、q分量進行逆坐標變換,可得橋臂電壓的輸出側頻率分量如下:
式中Tdq/αβ、Tdq/αβ-1為輸出側的逆坐標變換矩陣。
將橋臂電壓中的輸入、輸出頻率分量疊加,可將橋臂電壓表示如下:
式中Tdq/αβ-s為輸入側的逆坐標變換矩陣。
2 不平衡電網下微分平坦控制策略
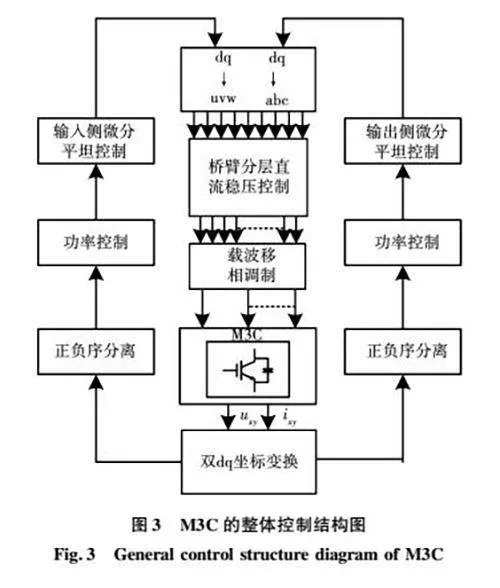
在不平衡工況下,M3C系統中會出現負序分量,導致過電流和非特征諧波的產生,影響控制效果,甚至燒毀元器件,對系統的安全穩定運行造成威脅,所以本文旨在研究基于M3C系統在不對稱故障條件下的控制策略。圖3為不平衡電網下M3C的總體控制結構圖,其控制策略包括輸入側控制、輸出側控制、正負序分離、功率控制、橋臂分層直流穩壓控制以及載波移相調制。
1)正負序分離:運用雙dq坐標變換對輸入側和輸出側的電壓、電流進行解耦,然后分別計算出正、負序電壓電流分量;
2)功率控制:根據不平衡工況下M3C的運行要求,引入功率控制來求解期望電流值;
3)輸入/輸出側控制:基于微分平坦理論,推導出輸入側、輸出側的DFC控制器;
4)子模塊獨立均壓控制:用于平衡橋臂的子模塊電容電壓,此控制有利于保證系統的安全穩定運行。
2.1 正負序分離
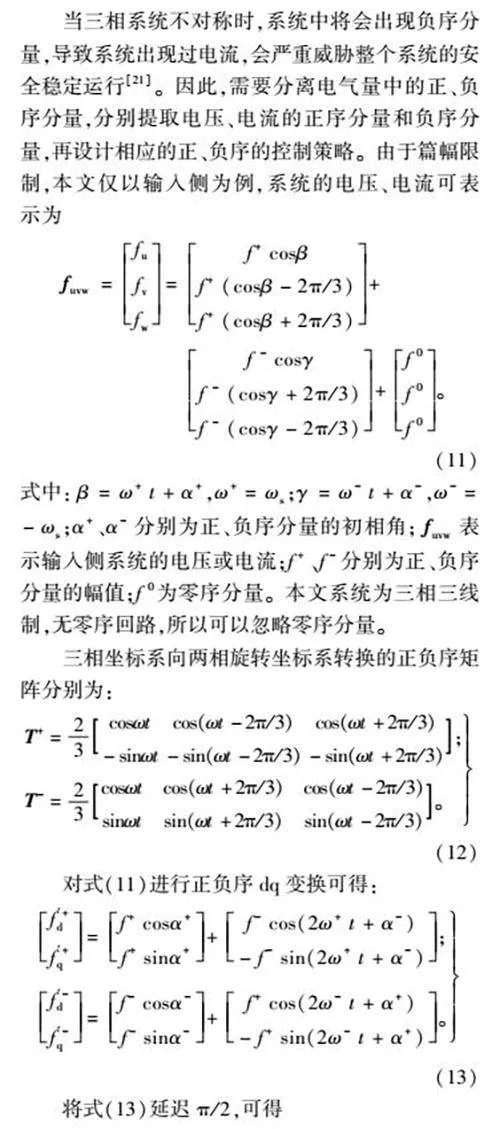
當三相系統不對稱時,系統中將會出現負序分量,導致系統出現過電流,會嚴重威脅整個系統的安全穩定運行[21]。因此,需要分離電氣量中的正、負序分量,分別提取電壓、電流的正序分量和負序分量,再設計相應的正、負序的控制策略。由于篇幅限制,本文僅以輸入側為例,系統的電壓、電流可表示為
式中:β=ω+t+α+,ω+=ωs;γ=ω-t+α-,ω-=-ωs;α+、α-分別為正、負序分量的初相角;fuvw表示輸入側系統的電壓或電流;f+、f-分別為正、負序分量的幅值;f0為零序分量。本文系統為三相三線制,無零序回路,所以可以忽略零序分量。
三相坐標系向兩相旋轉坐標系轉換的正負序矩陣分別為:
對式(11)進行正負序dq變換可得:
將式(13)延遲π/2,可得
聯立式(13)和式(14)可將正負序分離如下:
2.2 功率控制
根據瞬時無功功率理論,可將瞬時有功功率和無功功率表示為:
式中:P0是有功功率的直流分量;Q0是無功功率的直流分量;Ps2為有功功率的正弦2倍頻分量;Pc2為有功功率的余弦2倍頻分量;Qs2為無功功率的正弦2倍頻分量;Qc2為無功功率的余弦2倍頻分量。
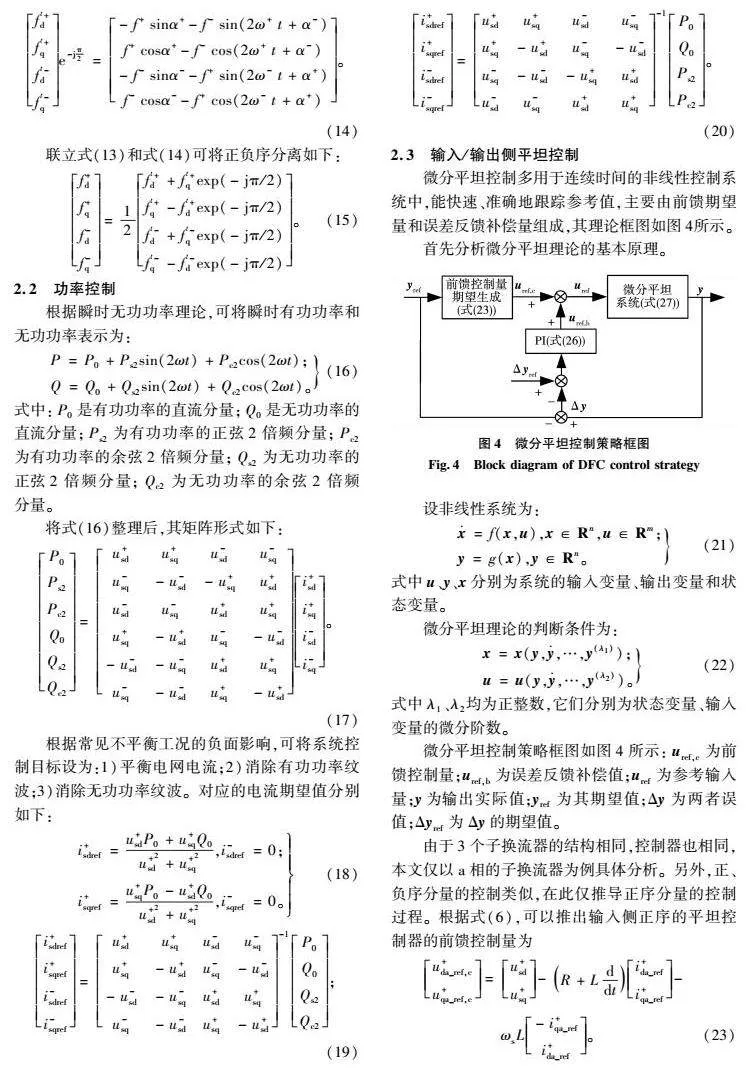
將式(16)整理后,其矩陣形式如下:
根據常見不平衡工況的負面影響,可將系統控制目標設為:1)平衡電網電流;2)消除有功功率紋波;3)消除無功功率紋波。對應的電流期望值分別如下:
2.3 輸入/輸出側平坦控制
微分平坦控制多用于連續時間的非線性控制系統中,能快速、準確地跟蹤參考值,主要由前饋期望量和誤差反饋補償量組成,其理論框圖如圖4所示。
首先分析微分平坦理論的基本原理。
設非線性系統為:
式中u、y、x分別為系統的輸入變量、輸出變量和狀態變量。
微分平坦理論的判斷條件為:
式中λ1、λ2均為正整數,它們分別為狀態變量、輸入變量的微分階數。
微分平坦控制策略框圖如圖4所示:uref,c為前饋控制量;uref,b為誤差反饋補償值;uref為參考輸入量;y為輸出實際值;yref為其期望值;Δy為兩者誤值;Δyref為Δy的期望值。
由于3個子換流器的結構相同,控制器也相同,本文僅以a相的子換流器為例具體分析。另外,正、負序分量的控制類似,在此僅推導正序分量的控制過程。根據式(6),可以推出輸入側正序的平坦控制器的前饋控制量為
式中u+da_ref,c、u+qa_ref,c分別為輸入電流參考值i+da_ref、i+qa_ref生成的前饋控制量。
將系統狀態變量誤差表示為:
將式(24)代入式(6),可得誤差模型如下:
由式(25)可得相應誤差反饋補償值為
式中:kDFp、kDFi為PI參數;u+da_ref,b、u+qa_ref,b分別為Δi+da、Δi+qa與參考值生成的誤差反饋補償值。
令Δi+da_ref=0,Δi+qa_ref=0,可得
聯立式(6)和式(27)可得
由式(28)可得d、q軸電流的閉環傳遞函數如下:
因此,上述設計的M3C平坦控制器能實現電氣量的解耦,響應速度快,跟蹤效果好。
類似地,可以推導出輸入側b相子換流器、c相子換流器以及輸出側的正序前饋控制量、誤差反饋補償量和平坦控制器分別為:
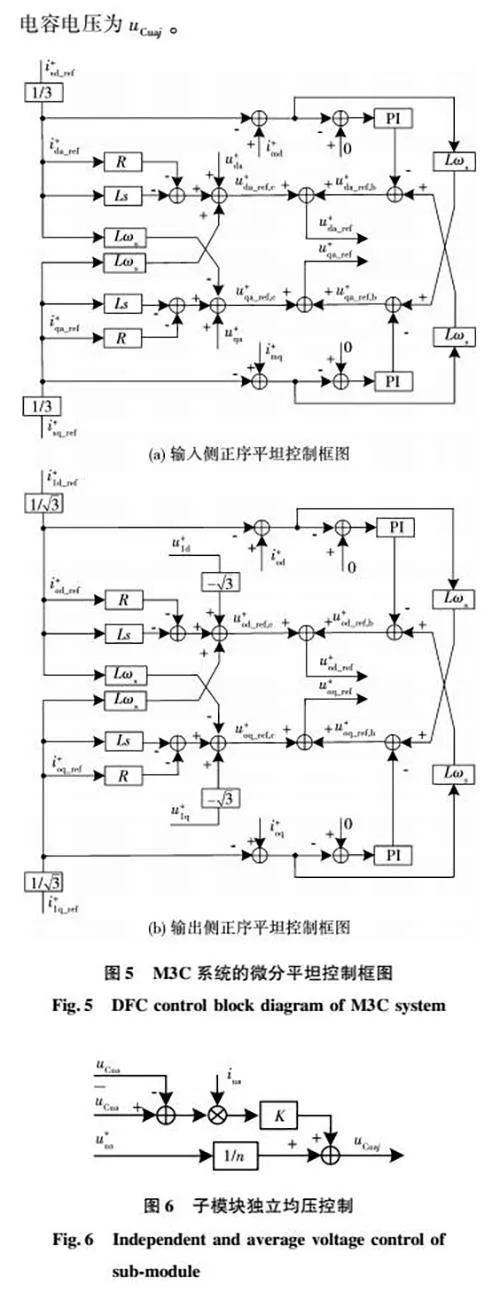
M3C輸入側、輸出側正序平坦控制的詳細框圖如圖5所示。
2.4 子模塊獨立均壓控制
本文采用子模塊獨立均壓控制使各子模塊的電容電壓達到穩定、均衡,其具體原理為:通過每個橋臂上的電流、對應橋臂的直流電壓、單個子模塊的電容電壓,結合輸入側、輸出側的平坦控制信號,得出最終的橋臂控制信號,再送入載波移相調制,以此保證子模塊電容電壓的穩定。控制框圖見圖6。
以橋臂ua為例,其總電容電壓uCua,子模塊平均電容電壓為u-Cua,調制信號為uua,第j個子模塊的電容電壓為uCuaj。
3 仿真實驗分析
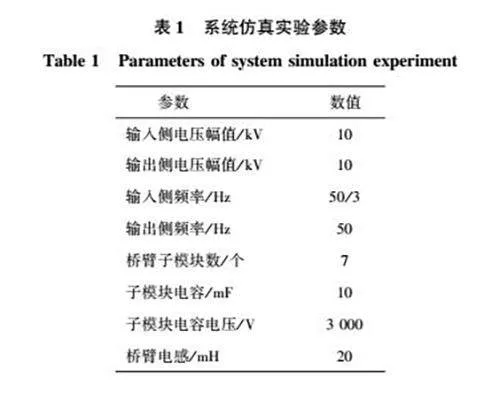
本文在 MATLAB/Simulink仿真平臺上對圖1所示M3C系統進行了模擬。由此設計了兩種不平衡故障工況,分別仿真了微分平坦控制與傳統的PID控制,并對比仿真效果。系統仿真參數如表1所示。
3.1 工況1實驗分析
在工況1下,由控制目標1(平衡電網電流)變為控制目標2(消除有功功率紋波)再變回控制目標1。具體如下:
1)0~0.1 s內,電網電壓無故障,系統正常運行,此時輸入側、輸出側均選擇控制目標1,且P0=12 MW,Q0=0;
2)0.1~0.2 s內,輸出側電壓a相跌落20%,構造輸出側三相電壓不對稱工況,此時輸出側選擇控制目標2,且P0=6 MW,Q0=0,輸入側無變化;
3)0.2~0.3 s內,輸入側電壓u相跌落20%,構造輸入側、輸出側三相電壓均不對稱的工況,輸入側輸出側均選擇控制目標2;
4)0.3~0.4 s內,設定輸入側、輸出側電壓恢復原值,交流系統對稱,回到無故障正常運行工況。
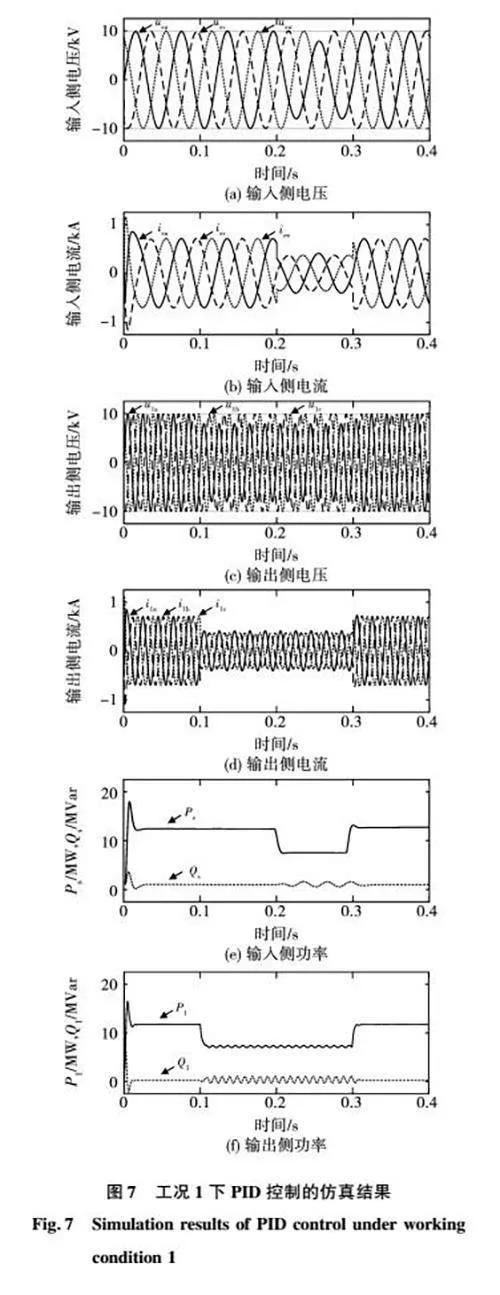
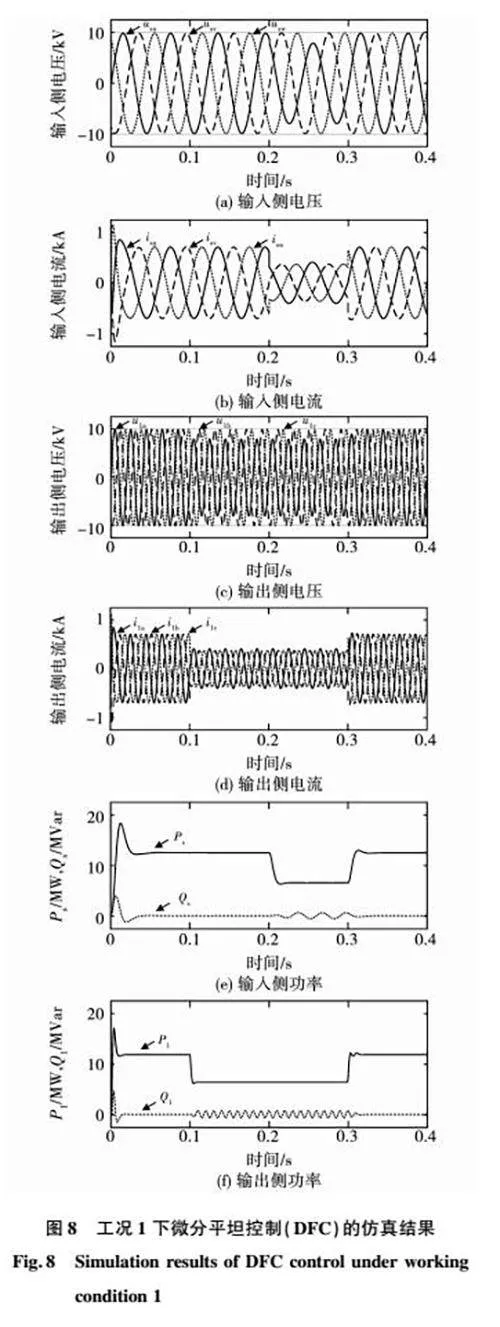
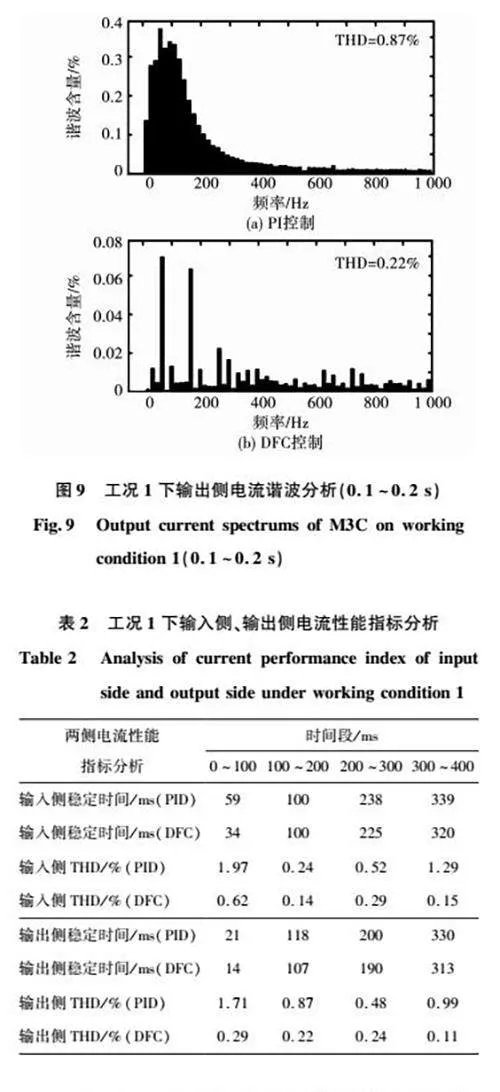
圖7和圖8為工況1下PID控制策略與微分平坦控制策略的仿真波形,包括輸入側電壓usu/usv/usw、輸入側電流isu/isv/isw、輸出側電壓u1a/u1b/u1c、輸出側電流i1a/i1b/i1c、輸入側有功無功功率Ps/Qs、輸出側有功無功功率P1/Q1。表2分別列出了工況1下PID控制策略與微分平坦控制策略的輸入側電流、輸出側電流的性能指標,并從穩定時間與總諧波畸變率(total harmonic distortion,THD)兩個方面來進行對比分析。由于篇幅有限,本文截取了0.1~0.2 s內輸出側電流的THD值制成圖9,其余THD值將直接表示在表2中。
分析圖7、圖8、圖9和表2可知,在電網出現不對稱故障時,傳統PID控制策略與本文所提的微分平坦控制策略均能達到控制要求,保證系統穩定運行,且微分平坦控制策略下各電氣量的性能指標均優于傳統PID控制。
1)0~0.1 s內,系統處于無故障正常運行狀態,在控制目標1下,兩種控制方法下的輸入側、輸出側電流都具有較好的三相對稱性,系統在微分平坦控制下的穩定速度較PID控制稍快,電能質量較高;
2)0.1~0.2 s內,輸出側出現不對稱故障,a相電壓跌落20%,輸出側控制目標為消除有功功率紋波,兩種控制方法下的輸出側電流,在不對稱故障與功率改變后都能達到新的穩定值。PID控制下系統的輸出側電流iabc與輸出側功率P1/Q1在0118 s后穩定,輸出側電流THD值為087%;微分平坦控制下系統的輸出側電流iabc與輸出側功率P1/Q1在0107 s后穩定,輸出側電流THD值為022%,對比可知微分平坦控制下輸出側電流能夠更快達到穩定,系統的諧波污染更低;
3)0.2~0.3 s內,輸入側和輸出側均出現不對稱故障,控制目標均為消除有功功率紋波,PID控制和微分平坦控制下系統的輸入側電流iuvw的THD值分別為052%和029%,說明微分平坦控制下系統的電能質量高;
4)0.3~0.4 s內,輸入側、輸出側均恢復無故障正常運行狀態,由表2可知,微分平坦控制下系統的能更快達到穩態,諧波含量更低,電能質量更高,能夠更有效地抑制負序電流。
3.2 工況2實驗分析
在工況2下,由控制目標1變為控制目標3再變回控制目標1。工況2具體如下:
1)0~0.1 s內,電網電壓無故障,系統正常運行,此時輸入側、輸出側均選擇控制目標1,且P0=12 MW,Q0=0。
2)0.1~0.2 s內,輸入側電壓u相跌落20%,構造輸入側三相電壓不對稱工況,此時輸出側選擇控制目標3,且P0=6 MW,Q0=0,輸出側無變化;
3)0.2~0.3 s內,輸出側電壓a相跌落20%,構造輸入側、輸出側三相電壓均不對稱的工況,輸入側輸出側均選擇控制目標3;
4)0.3~0.4 s內,設定輸入側、輸出側電壓恢復原值,交流系統對稱,回到無故障正常運行工況。
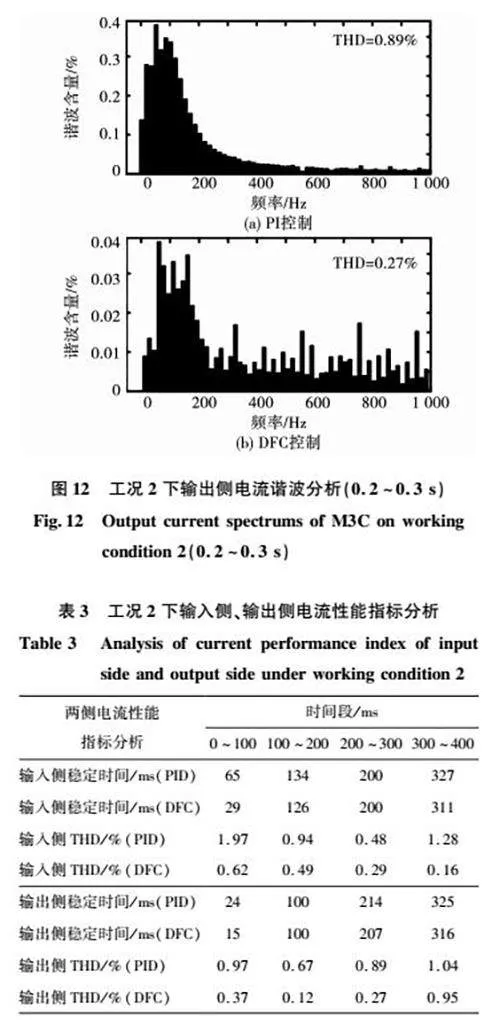
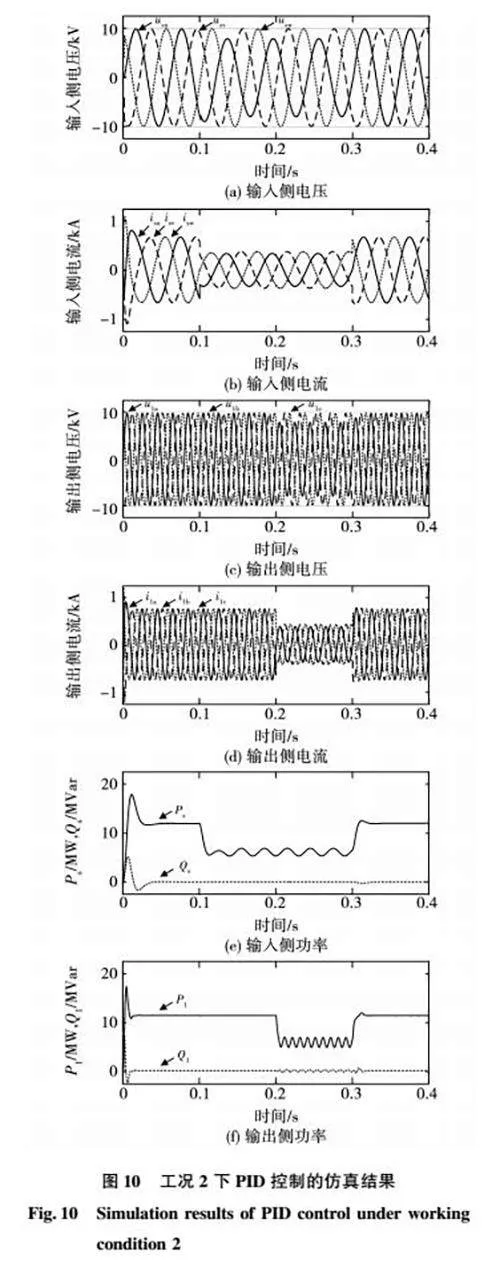
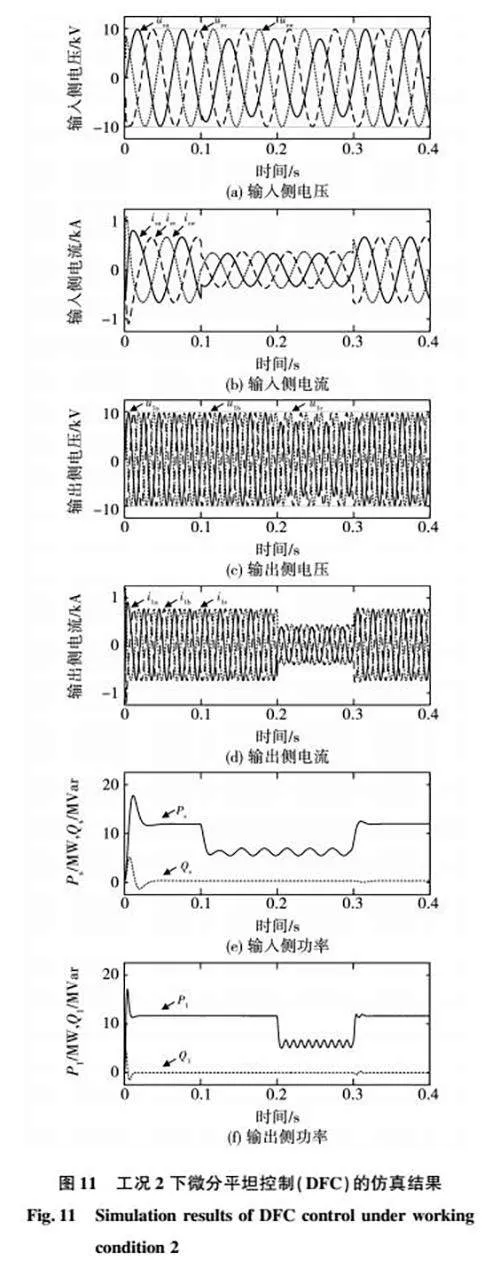
圖10和圖11為工況2下PID控制策略與微分平坦控制策略的仿真波形,包括輸入側電壓usu/usv/usw、輸入側電流isu/isv/isw、輸出側電壓u1a/u1b/u1c、輸出側電流i1a/i1b/i1c、輸入側有功無功功率Ps/Qs、輸出側有功無功功率P1/Q1。由于篇幅有限,本文截取了0.1~0.2 s內輸出側電流的THD值制成圖12,其余THD值將直接表示在表中。表3分別列出了工況2下兩種控制策略的輸入側電流、輸出側電流的性能指標,便于進一步對比分析。
分析圖10、圖11、圖12和表3可知,在工況2下,微分平坦控制策略的控制效果優于傳統PID控制。具體分析如下:
1)0~0.1 s內,系統為無故障正常運行狀態;
2)0.1~0.2 s內,輸入側出現不對稱故障,u相電壓跌落20%,輸入側控制目標為消除無功功率紋波,兩種控制方法下的輸入側、輸出側電流,在不對稱故障與功率改變后都能迅速穩定;
3)0.2~0.3 s內,輸入側和輸出側均出現不對稱故障,控制目標均為消除無功功率紋波,PID控制下系統的輸出側電流iabc與輸出側功率P1/Q1在0214 s后穩定,輸出側電流THD值為089%;微分平坦控制下系統的輸出側電流iabc與輸出側功率P1/Q1在0207 s后穩定,輸出側電流THD值為027%,對比可知微分平坦控制下動態穩定性與快速性更好,諧波污染更低;
4)0.3~0.4 s內,輸入側、輸出側均恢復無故障正常運行狀態,由表3可知,微分平坦控制下系統的穩定速度、動態性能、控制效果均優于傳統PID控制。
通過對比上述兩種運行工況的仿真結果,不難得知無論是在正常運行工況下,或是系統出現單側、雙側不對稱故障的工況下,微分平坦控制的效果均優于PID控制。
4 結 論
本文對電網不平衡下的M3C微分平坦控制進行了深入研究。首先,根據雙dq坐標變換建立了M3C的輸入輸出側解耦模型,提取電壓電流的正負序分量,基于微分平坦理論,設計出了輸入側、輸出側的微分平坦控制器,最后在MATLAB/Simulink平臺上設計了兩種不平衡工況,分別模擬了微分平坦控制和傳統PID控制的運行效果,驗證了本文所提控制策略的先進性。且通過理論分析和仿真對比可以得到以下結論:
1)雙dq坐標變換中所有的受控量均為直流量,控制結構較雙αβ更簡單,實現容易,同時也具備優良的穩態和動態性能。
2)與傳統的線性PID控制相比,非線性的平坦控制更適用于非線性的M3C系統。在平衡電網或電網出現不對稱故障時,微分平坦控制下的控制效果均優于PID控制,其動態穩定性與快速性更好,諧波污染更低。
參 考 文 獻:
[1]"YOU Shutang, ZHAO Jiecheng, YAO Wenxuan, et al. FNET/grideye for future high renewable power gridsapplications overview[C]// 2018 IEEE PES Transmission amp; Distribution Conference and ExhibitionLatin America (Tamp;DLA), September 18-21, 2018, Lima, Peru. 2018: 1-5.
[2]"WU Jiahui, WANG Haiyun, WANG Weiqing, et al. Performance evaluation for sustainability of wind energy project using improved multicriteria decisionmaking method[J]. Journal of Modern Power Systems and Clean Energy, 2019, 7(5): 1166.
[3]"KAWAMUR W, CHEN Kuanliang, HAGIWARA M, et al. A lowspeed, hightorque motor drive using a modular multilevel cascade converter based on triplestar bridge cells (MMCCTSBC)[J]. IEEE Transactions on Industry Applications, 2015, 51(5): 3966.
[4]"HOSSAIN M I, ABIDO M A. Positivenegative sequence current controller for LVRT improvement of wind farms integrated MMCHVDC network[J]. IEEE Access, 2020, 8: 193314.
[5]"楊碩, 郭春義, 王慶, 等. 分層接入特高壓直流輸電系統協調控制策略研究[J]. 中國電機工程學報, 2019, 39(15): 4357
YANG Shuo, GUO Chunyi, WANG Qing, et al. Coordinated control approach for UHVDC system under hierarchical connection mode[J]. Proceedings of the CSEE, 2019, 39(15): 4357.
[6]"鄧銀秋, 汪震, 韓俊飛, 等. 適用于海上風電接入的多端柔直網內不平衡功率優化分配控制策略[J]. 中國電機工程學報, 2020, 40(8): 2406.
DENG Yinqiu, WANG Zhen, HAN Junfei, et al. A novel chopper topology for grid side fault ride through in VSCHVDC based offshore wind power connection[J]. Proceedings of the CSEE, 2020, 40(8): 2406.
[7]"LUO Jiajie, ZHANG Xiaoping, XUE Ying, et al. Harmonic analysis of modular multilevel matrix converter for fractional frequency transmission system[J]. IEEE Transactions on Power Delivery, 2020, 35(3): 1209.
[8]"AlTAMEEMI M, MIURA Y, LIU J, et al. A novel control scheme for multiterminal lowfrequency AC electrical energy transmission systems using modular multilevel matrix converters and virtual synchronous generator concept[J]. Energies, 2020, 13(3): 748.
[9]"MENG Yongqing, SHANG Shuonan, ZHANG Haitao, et al. IDAPB control with integral action of Yconnected modular multilevel converter for fractional frequency transmission application[J]. IET Generation Transmission amp; Distribution, 2018, 12(14): 3386.
[10]"ERICKSON R W, AlNASEEM O A. A new family of matrix converters[C]// 27th Annual Conference of the IEEE Industrial Electronics Society, November 29December 2, 2001, Denver, USA. 2001: 1515-1520.
[11]"OATES C. A methodology for developing ‘Chainlink’ converters[C]// 13th European Conference on Power Electronics and Applications, September 8-10, 2009, Barcelona, Spain. 2009: 1-10.
[12]"KAMMERER F, KOLB J, BRAUN M. Fully decoupled current control and energy balancing of the modular multilevel matrix converter[C]// 15th International Power Electronics and Motion Control Conference (EPE/PEMC), September 4-6, 2012, Novi Sad, Serbia. 2012: LS2a.3-1-LS2a.3-8.
[13]"KAWAMUR W, AKAGI H. Control of the modular multilevel cascade converter based on triplestar bridgecells (M2CCTSBC) for motor drives[C]//IEEE Energy Conversion Congress and Exposition (ECCE), September 15-20, 2012, Raleigh, USA. 2012: 3506-3513.
[14]"KAWAMUR W, HAGIWARA M, AKAGI H. Control and experiment of a modular multilevel cascade converter based on triplestar cells[J]. IEEE Transactions on Industry Applications, 2014, 50(5): 3537.
[15]"NADEMI H, NORUM L E, SOGHOMONIAN Z, et al. Low frequency operation of modular multilevel matrix converter using optimizationoriented predictive control scheme[C]// 2016 IEEE 17th Workshop on Control and Modeling for Power Electronics(COMPEL), June 27-30, 2016, Trondheim, Norway. 2016: 1-6.
[16]"程啟明, 馬信喬, 江暢, 等. 模塊化多電平矩陣換流器輸入側的無源控制策略[J]. 電力系統自動化, 2021, 45(11): 137.
CHENG Qiming, MA Xinqiao, JIANG Chang, et al. Passivitybased control strategy for input side of modular multilevel matrix converter[J]. Automation of Electric Power Systems, 2021, 45(11): 137.
[17]"程啟明, 謝怡群, 馬信喬, 等. 模塊化多電平矩陣變換器的平坦控制策略[J].電力自動化設備, 2022, 42(1): 187.
CHENG Qiming, XIE Yiqun, MA Xinqiao, et al. Flat control strategy for modular multilevel matrix converter[J]. Power Automation Equipment, 2022, 42(1): 187.
[18]"孟永慶, 王健, 李磊, 等. 基于雙 dq 坐標變換的M3C變換器的數學模型及控制策略研究[J]. 中國電機工程學報, 2016, 36(17): 4703.
MENG Yongqing, WANG Jian, LI Lei, et al. Research on modeling and control strategy of modular multilevel matrix converter based on double dq coordinate transformation[J]. Proceedings of the CSEE, 2016, 36(17): 4703.
[19]"宋平崗, 周鵬輝, 肖丹, 等. MMCRPC的功率同步平坦控制策略[J]. 電力自動化設備, 2019, 39(11): 146.
SONG Pinggang, ZHOU Penghui, XIAO Dan, et al. Power synchronization flatness control strategy of MMCRPC[J]. Power Automation Equipment, 2019, 39(11): 146.
[20]"SHAHIN A, MOUSSA H, FORRISI I, et al. Reliability improvement approach based on flatness control of parallelconnected inverters[J]. IEEE Transactions on Power Electronics, 2017, 32(1): 682.
[21]"張翀. 模塊化多電平矩陣換流器在AC/AC 系統應用中的關鍵技術研究[D]. 杭州: 浙江大學, 2020.
(編輯:劉琳琳)
收稿日期: 2022-12-09
基金項目:國家自然科學基金(62303301);上海市電站自動化技術重點實驗室資助項目(13DZ2273800)
作者簡介:程啟明(1965—),男,博士,教授,研究方向為電力系統自動化、發電過程控制、先進控制及應用;
杜婷偉(2000—),女,碩士研究生,研究方向為新能源發電控制、海上風力發電控制;
賴宇生(1996—),男,碩士研究生,研究方向為新能源發電控制、電力電子控制。
通信作者:杜婷偉
