事故汽車車身結構掃描的數字化檢測系統設計
2024-06-01 16:56:17張家忠
專用汽車 2024年5期
關鍵詞:修復
摘要:在事故車輛修復領域,傳統的目視檢查方法往往難以全面準確地評估車輛損傷,容易忽略結構性隱患,從而影響修復質量和車輛性能。提出了一種用于汽車車身數字化檢測的分析系統,采用三維掃描的方式讀取事故汽車的車身結構損傷程度,通過算法的自動分析生成事故汽車車身結構的三維數據,為事故汽車的定損與維修提供了參考性意見。
關鍵詞:事故汽車;數字化檢測技術;三維掃描;修復
中圖分類號:U472.9? 收稿日期:2024-04-10
DOI:1019999/jcnki1004-0226202405033
1 前言
隨著社會的不斷發展,全球汽車保有量的不斷增加,交通事故的發生率呈現出直線上升趨勢,車輛發生交通事故之后的定損以及維修工作需要大量的人力物力投入,并且事故汽車損傷的復雜性不斷增加,對車輛的結構完整性評估提出了新的挑戰。事故汽車車身數字化檢測技術的發展根植于數字化制造和信息技術的進步,傳統的車身損傷檢測通常依賴于經驗和手工測量,這不僅費時費力,而且容易出現人為誤差。
2 車身數字化的檢測技術
21 CCD攝像機測量技術
CCD攝像機測量技術的原理基于CCD(Charge-Coupled Device)圖像傳感器的光電轉換原理為核心,通過將光信號轉化為電信號,實現圖像的采集和傳輸,通過采集和處理圖像信息來實現對車身表面的高精度測量。
a.確定CCD攝像機的布局和位置,確保其能夠全面掃描車身表面。
b.通過激光或光源系統,確保充分照明車身表面,使得CCD攝像機能夠準確捕捉到表面的細微特征。
c.利用圖像處理算法,對采集到的圖像進行校正、配準和去噪,以提高測量精度,測量階段需要考慮光照條件對圖像質量的影響,采取適當的補償手段。
d.通過與模型匹配或其他測量標準,得到車身表面的數字化數據,用于后續的分析和修復。
22 紅外線光幕測量
通過在車輛周邊布置紅外線發射器和接收器組成的光幕系統,確保其能夠完整地覆蓋整個車身表面。紅外線發射器產生紅外光束,沿車身表面形成一道光幕,而接收器則接收目標物體表面反射的紅外光信號,并且當車身表面發生形狀或結構的變化時,反射光的路徑發生變化,通過探測這些變化,可以獲取車身表面的形貌信息。除此之外,通過測量反射光的時間延遲或強度等參數,確定目標物體表面各點的空間坐標,該過程通常需要采用高速的紅外傳感器和精密的時序控制系統,確保測量的實時性和準確性。
3 事故汽車車身結構掃描的數字化檢測系統的設計方案
31 整體方案
基于國家標準和實際測量要求,設計了一套事故汽車車身數字化檢測系統,以確保高精度和系統可靠性。主要采用二維激光掃描測距儀作為主要測量儀器,系統由三個二維激光掃描測距儀構成,分別用于車輛的寬、高和長度的測量。
在系統布局上,左右兩側各配置一個激光掃描儀用于寬度和高度的測量,而一個激光掃描儀則安裝在車輛行駛方向的正前方,負責完成車身長度的測量。通過系統標定,左右兩側的激光掃描儀的掃描平面在理論上相互重疊,形成一個掃描光幕。
在機械結構設計中,將三個激光掃描測距儀安裝在前后兩個龍門架上,其中前方龍門架上安裝一個激光掃描測距儀,位于龍門架中間位置,而后方龍門架上則安裝兩個激光掃描測距儀,分別位于龍門架的左右兩側。這樣的布局設計充分考慮到車輛的不同部分存在不同的輪廓特征,通過前后兩個龍門架的配合,能夠全面覆蓋整個車身,并確保對車輛尺寸的全方位測量。
32 寬度數據確認
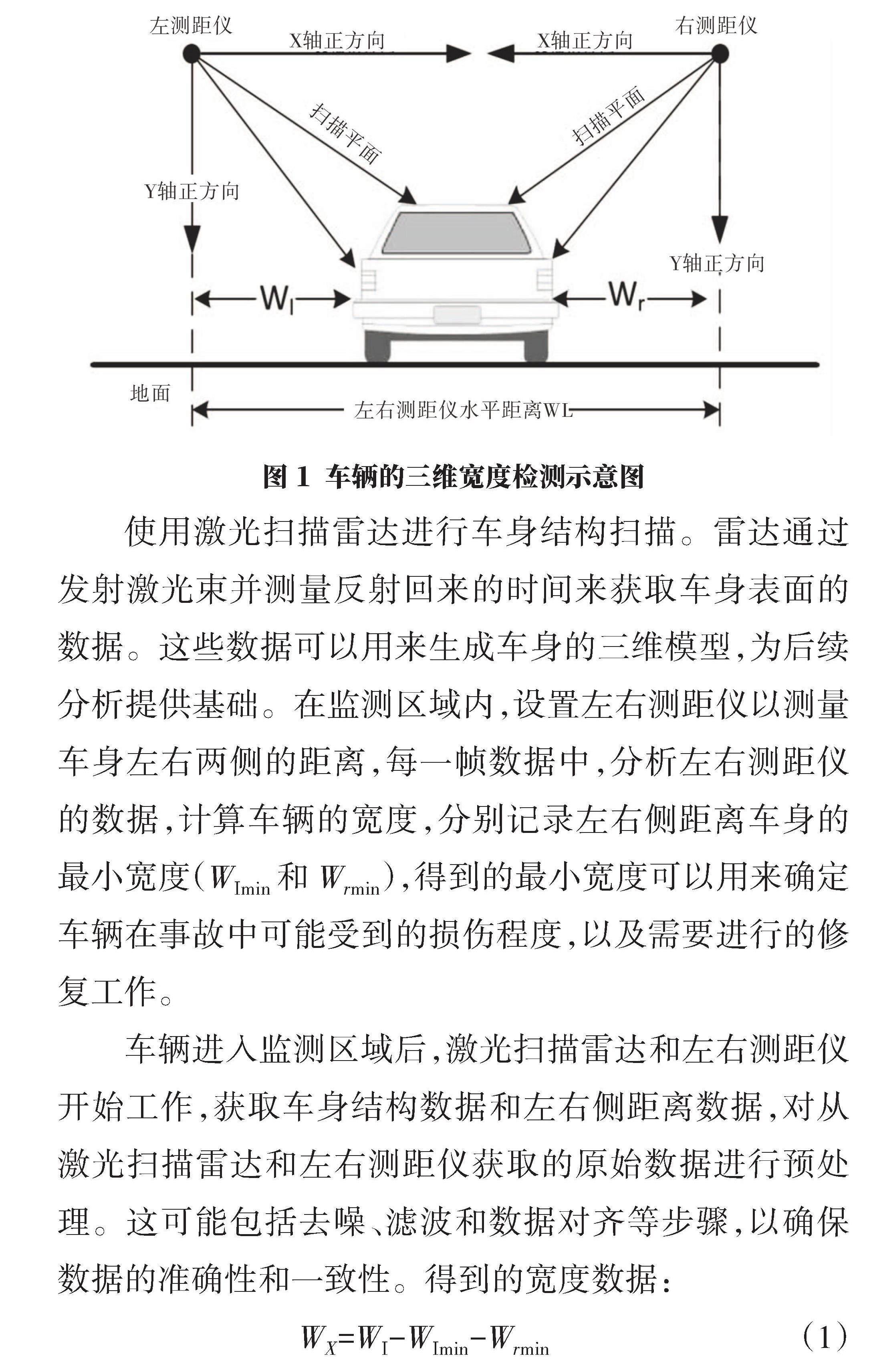
車輛的三維寬度檢測如圖1所示,通過激光掃描雷達來獲取車身結構的數據,進而進行寬度數據確認,以幫助評估事故車輛的損傷程度和修復難度。
使用激光掃描雷達進行車身結構掃描。雷達通過發射激光束并測量反射回來的時間來獲取車身表面的數據。這些數據可以用來生成車身的三維模型,為后續分析提供基礎。在監測區域內,設置左右測距儀以測量車身左右兩側的距離,每一幀數據中,分析左右測距儀的數據,計算車輛的寬度,分別記錄左右側距離車身的最小寬度(WImin和Wrmin),得到的最小寬度可以用來確定車輛在事故中可能受到的損傷程度,以及需要進行的修復工作。
車輛進入監測區域后,激光掃描雷達和左右測距儀開始工作,獲取車身結構數據和左右側距離數據,對從激光掃描雷達和左右測距儀獲取的原始數據進行預處理。這可能包括去噪、濾波和數據對齊等步驟,以確保數據的準確性和一致性。得到的寬度數據:
WX=WI-WImin-Wrmin? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (1)
式中,WX為車輛進入檢測系統后第X幀時的寬度;WI表示兩個激光雷達掃描中心在X方向上的水平距離;WImin為掃描中左側激光雷達距離車身的最小距離;Wrmin為掃描中右側激光雷達距離車身的最小距離。
33 高度數據確認
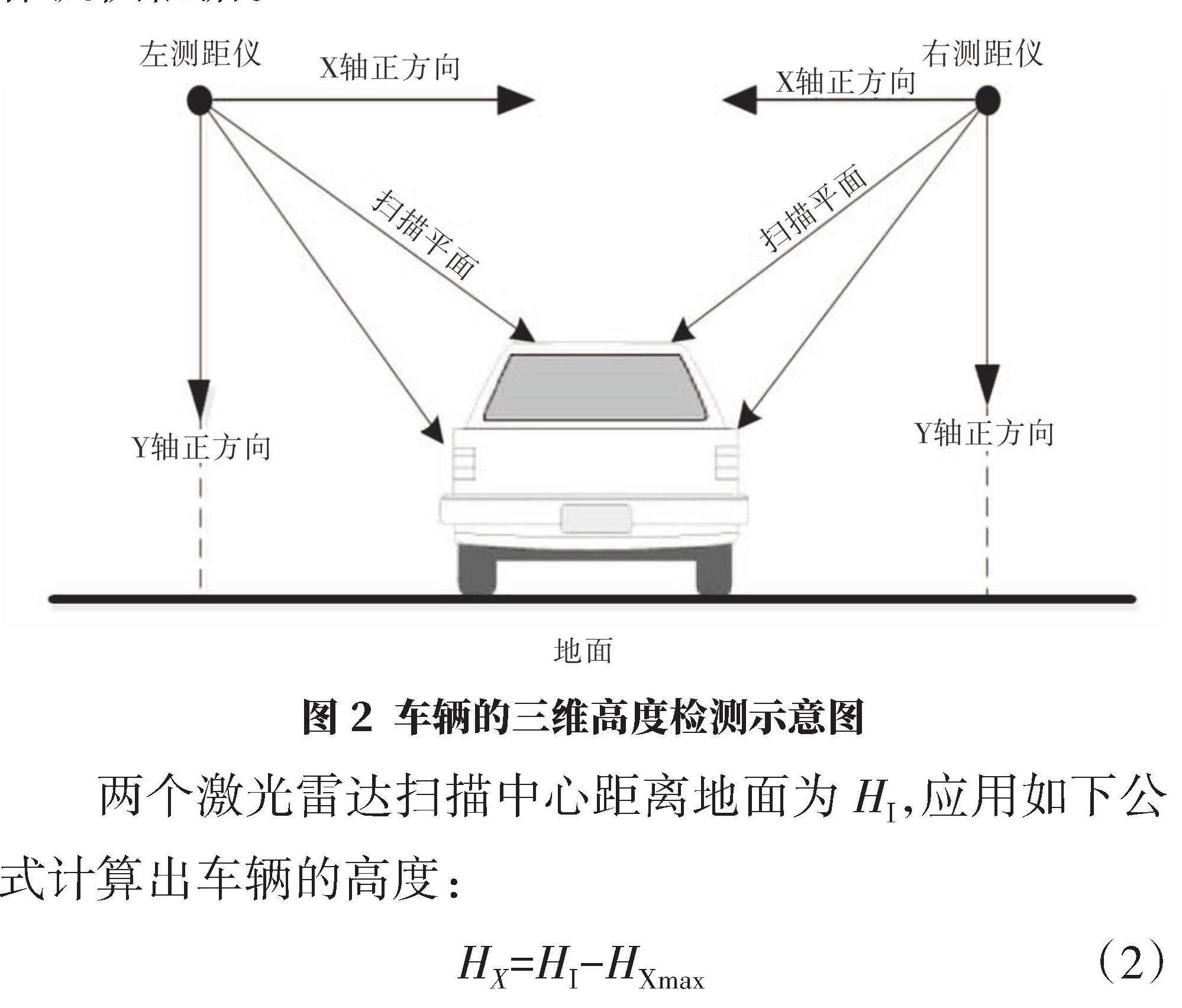
如圖2所示,在監測區域內設置激光雷達,對車身結構進行垂直方向的掃描,以獲取車身在不同位置上的高度數據,使用激光雷達掃描技術獲取車輛車身結構的高度數據。激光雷達通過發射激光束并測量反射回來的時間,可以精確地獲取車身表面的高度信息,分析激光雷達掃描得到的數據,計算車身在不同位置上的最大高度和最小高度,以及高度的變化情況。基于分析結果,確認車輛的高度范圍,并評估可能存在的損傷或變形情況,有助于確定車輛的整體狀況,為后續的修復工作提供依據。
兩個激光雷達掃描中心距離地面為HI,應用如下公式計算出車輛的高度:
HX=HI-HXmax? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (2)
式中,Hxmax為車輛在Y軸正方向上在車身上的每一幀中的投影最小值;HI為經過標定后激光雷達掃描位置距離地面的直線距離。
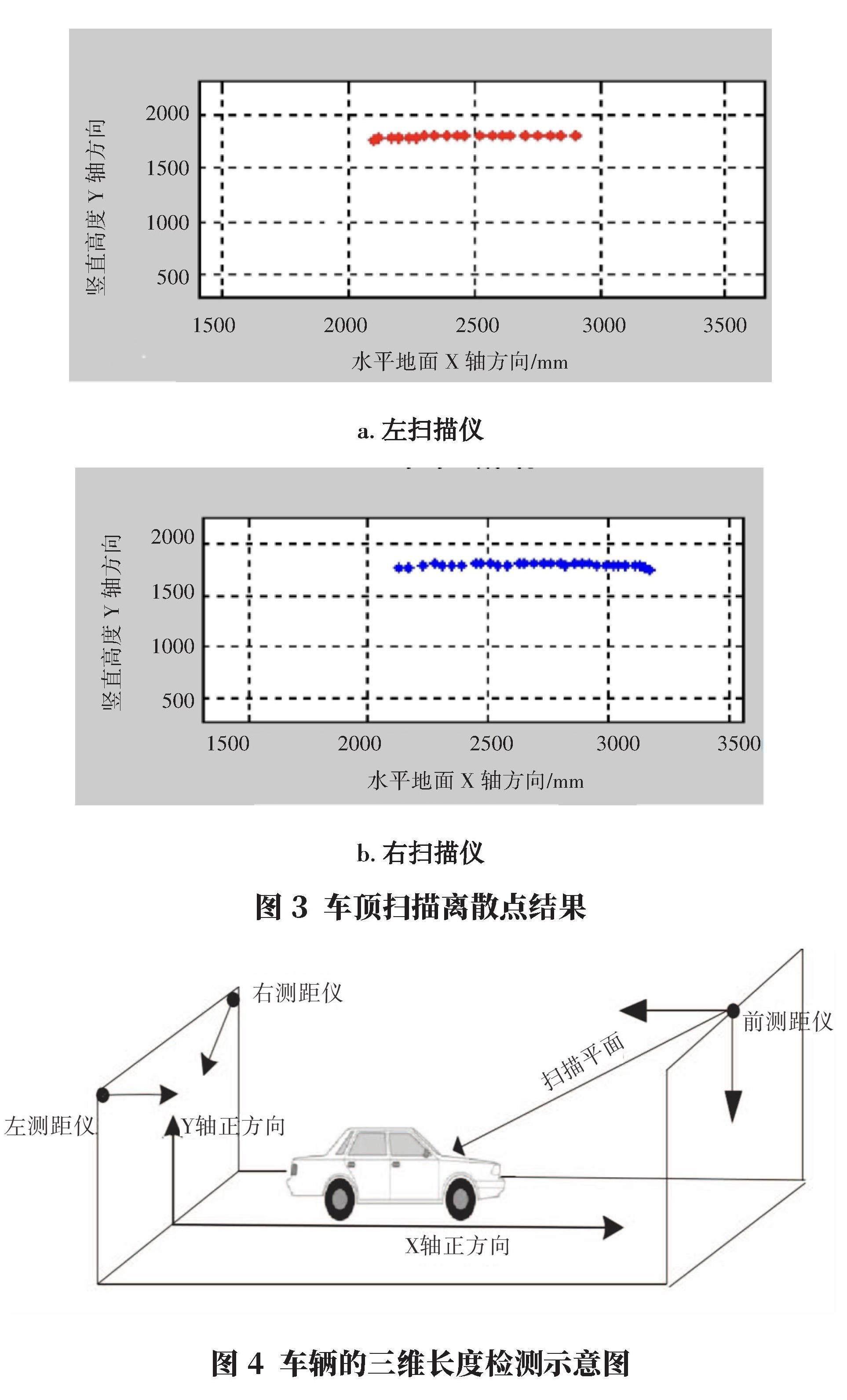
使用激光雷達對車輛進行垂直方向的掃描,將車身結構轉化為高度數據,在激光雷達掃描的每個斷面中,分析車身高度數據,以確定該斷面中車身的最大高度。此外,通過對每個斷面的車身高度分析,找出其中的最大高度HXmax,即為車輛在左側激光測距儀掃描光幕上的最大高度。與此同時,可以結合車身高度數據與其他維度的數據進行綜合分析,更全面地評估車輛的損傷情況和結構變化。具體而言,為了確保在一個掃描斷面內,左右掃描儀在車輛頂部掃描采集的離散點分布,如圖3所示。
34 長度測量
如圖4所示,使用激光雷達對車身進行全方位掃描,獲取車身的三維數據。首先,在掃描過程中,標記車身的起始點和終點,以確定車身的長度測量范圍,對激光雷達掃描得到的原始數據進行處理,包括去噪、濾波和數據對齊等步驟,以確保數據的準確性和可靠性。其次,根據起始點和終點的位置,計算車身的長度,并進行必要的單位轉換,以得到最終的長度值,同時確認車身的長度,根據實際情況對其進行評估,以確定可能存在的損傷或變形情況。
35 輪廓繪制
當車輛進入檢測系統之后,左右激光測距儀固定在龍門架上的掃描光幕將覆蓋整個車身的頂部和側身,形成一系列完整的掃描橫斷面。在車身結構三維掃描后上位機的顯示界面如圖5所示。
車身結構三維掃描的空間坐標系如圖6所示。使用激光雷達對事故汽車進行全方位掃描,獲取車身的三維點云數據。具體而言,在掃描過程中,根據車寬和車高,建立車輛的坐標系。X軸沿著車寬方向,Y軸沿著車高方向,Z軸則與地面垂直。
根據激光雷達掃描得到的點云數據,在車輛的坐標系中繪制車身輪廓。這可以通過在二維平面上連接點云中的相鄰點,形成車輛的輪廓線。在此基礎上對繪制得到的輪廓進行數據處理和優化,去除可能存在的噪點和不必要的細節,以獲得更加清晰和準確的車身輪廓。
通過車身結構三維掃描空間坐標系的選擇,使得整個車身的三維信息能夠被統一到一個坐標系內,便于后續的數據處理和分析。
a.對掃描得到的輪廓點數據進行預處理。這包括去除可能存在的噪聲點、平滑處理以消除不必要的波動,以及進行數據對齊以確保所有數據點在同一坐標系下。
b.使用數學曲線擬合技術,如最小二乘法或Bezier曲線擬合等,對處理后的輪廓點進行擬合,以獲得車身的主要曲線輪廓。這些曲線可以代表車身的側面、頂部或底部等特征。
c.通過擬合曲線,可以計算出車身的一些重要結構參數,同時可以進一步分析車身的特征,如車身的流線型、凹凸部位、突起或變形等。這有助于評估車身的整體形狀和可能存在的損傷情況。
掃描得到的車身每個點的坐標為[xij,yij,zi],則實體車身[R]的結構參數為:
[R=x11,y11,z1x12,y12,z2…x1n,y1n,znx21,y21,z1x22,y22,z2…x2n,y2n,zn?xn1,yn1,z1xt2,yt2,z2…xqn,yan,zn]? ? ? ? ?(3)
每個車身掃描斷面可以表示為:
[Li=x1i,y1j,zjx2i,y2i,zi?xnij,yni,zi]? ? ? ? ? ? ? ? ? ? ? ? ? ? (4)
綜上,車身實體[R]可以用所有斷面的集合來表示:
[R=L1 L2… Ln]? ? ? ? ? ? ? ? ? ? ? ? ? ?(5)
36 損傷評估
基于車身數字化檢測的損傷評估方法如下:
步驟1:點云數據獲取。
表征車身表面的點云數據可以表示為集合[P],其中每個點[p(i)]具有三維坐標[(x(i),y(i)],[z(i))]。
步驟2:表面形貌變化計算。
通過計算相鄰點之間的距離或曲率等指標,表征表面形貌的變化。對于點云中的兩個相鄰點[p(i)]和[p(j)],其表面形貌變化可用以下公式表示:
[D(p(i),p(j))=]
[(x(i)?x(j))2+(y(i)?y(j))2+(z(i)?z(j))2]? ? ?(6)
步驟3:損傷程度計算。
利用表面形貌變化計算損傷程度,可以采用相鄰點之間距離的變化率等指標,對于點云中的三個相鄰點[p(i?1)、p(i)、p(i+1)],損傷程度可以表示為:
[Dm(p(i))=D(p(i?1),p(i))+D(p(i),p(i+1))2]? ? ?(7)
步驟4:整體損傷評估。
對整個車身進行損傷評估,可以采用各點損傷程度的平均值或加權平均值。整體損傷評估可表示為:
TDm[=1Ni=1NDm(p(i)) ]? ? ? ? ? ? ? ? ? ? ?(8)
式中,[N]為點云數據中點的總數。
步驟5:結構性損傷檢測。
通過分析點云數據中的區域性密集損傷,可以檢測出結構性損傷,可以通過聚類算法或密度分析確定點云中聚集的損傷點,識別結構性損傷區域。
4 結語
本文深入探討了數字化檢測在車身損傷評估的技術方案,通過對車身三維掃描數據的損傷評估,為車輛損傷提供了可量化、結構化的信息。該評估方法不僅直觀地呈現了損傷部位的具體情況,而且通過數字化輔助設計,為修復過程提供了科學、精準的方案。
參考文獻:
[1]于春生,朱正林車身結構復雜曲面CAD逆向三維空間造型方法研究[J]江蘇機械制造與自動化,1999(6):13-14
[2]孔尚,何少煒,陶元,等客車側翻耐撞性能分析與車身結構優化[J]輕型汽車技術,2022(5):24-30
[3]林小鳳事故車輛車身變形的提取及等效化技術研究[D]西安:長安大學,2024
[4]丁華,朱茂桃,夏長高三維光學掃描測量系統在《汽車車身設計》教學中的應用[C]//International Conference on Management Science & Engineering,2010
[5]楊征宇,陳茹雯,陳偉汽車車身結構數字化開發技術:Automobile body digital development technology[M]北京:國防工業出版社,2014
[6]阮景奎,柯映林,范樹遷汽車車身模具的數字化快速修復技術[C]//中國國際汽車車身開發與模具制造技術研討會北京:中國機械工程學會,2005
作者簡介:
張家忠,男,1984年生,一級實習指導教師,研究方向為汽車車身修復技術。
猜你喜歡
科技創新導報(2016年23期)2016-12-23 10:13:54
中小企業管理與科技·上旬刊(2016年11期)2016-11-28 21:08:46
資治文摘(2016年7期)2016-11-23 00:23:20
藝術科技(2016年9期)2016-11-18 16:42:09
數字技術與應用(2016年9期)2016-11-09 00:06:42
科技視界(2016年18期)2016-11-03 23:42:42
中國實用醫藥(2016年24期)2016-10-17 04:17:37
科學與財富(2016年28期)2016-10-14 23:22:54
科技視界(2016年20期)2016-09-29 13:12:16
中國科技博覽(2016年15期)2016-08-23 20:18:06