基于 UWB 的綜采工作面推進度測量系統
2024-05-27 14:01:51劉清劉軍鋒
工礦自動化 2024年4期
劉清 劉軍鋒
文章編號:1671?251X(2024)04?0033?08
DOI:10.13272/j.issn.1671-251x.2023120024
摘要:針對目前綜采工作面推進度的測量和計算方式存在費時費力、累計誤差大、傳感器損壞后無法重新計算等問題,提出了一種基于 UWB測距技術的綜采工作面推進度實時測量系統。該系統采用礦用本安型測距分站與測距標志卡組合的方式,通過無線通信實現對綜采工作面巷道推進度的實時測量。在綜采工作面端頭液壓支架布置測距分站,在回采巷道固定標志點懸掛測距標志卡,通過巷道內 UWB無線信號測距,當即將開采到最近的測距標志卡位置時,撤掉該處測距標志卡,后續測距標志卡接替進行巷道推進度的測量與計算,依此循環往復,不斷進行更替測量。結合采煤工藝,建立了依據采煤機位置和液壓支架動作的限幅中值平均濾波模型,該模型將限幅濾波、中值濾波、算術平均濾波深度融合,以剔除海量數據中由于受到測量、遮擋等影響而造成的測量偏差較大的無效數據,同時消除有效數據中的最大和最小偏差數據,進一步保證了通過算術平均運算得到的測量值的準確性和有效性,實現了綜采工作面推進度的連續測量。地面測試結果表明,測距分站1的最大誤差為0.32 m,誤差小于0.2 m 的占比為84.62%;測距分站2的最大誤差為0.48 m,誤差小于0.2 m 的占比為76.92%。井下工業性試驗結果表明:該系統與礦方實測數據日平均推進度差值為0.13 m,證明了 UWB測距技術在井下巷道條件下測距的可行性和基于采煤工藝的推進度測量模型的準確性。
關鍵詞:綜采工作面;推進度測量;UWB 測距;雙邊雙向測距法;限幅中值平均濾波模型中圖分類號:TD67 ?文獻標志碼:A
UWB based measurement system for pushing progress of fully mechanized working face
LIU Qing, LIU Junfeng
(Beijing Tianma Intelligent Control Technology Co., Ltd., Beijing 101399, China)
Abstract: A real-time measurement system for the pushing progress of fully mechanized working face based on UWB ranging technology is proposed to address the problems of existing measurement and calculation methods, such as time-consuming, labor-intensive, large cumulative errors, and inability to recalculate after sensor damage. The system adopts a combination of mining intrinsic safety distance measurement substation and distance measurement marker card, and achieves real-time measurement of the progress of roadway pushing in the fully mechanized working face through wireless communication. At the end of the fully mechanized working face, a distance measuring substation is arranged on the hydraulic support, and a distance measuring mark card is hung at the fixed marking point of the mining roadway. The distance is measured through UWB wireless signal in the roadway. When the mining is about to reach the nearest distance measuring mark card position, the distance measuring mark card is removed. The subsequent distance measuring mark card is replaced to measure and calculate the progress of the roadway pushing, so as to continuously replace the measurement. Based on the coal mining technology, a limited amplitude median average filtering model is established based on the position of theshearer and the action of the hydraulic support. This model deeply integrates limited amplitude filtering, median filtering, and arithmetic mean filtering to eliminate invalid data with large measurement deviations caused by measurement and occlusion in massive data. At the same time, the maximum and minimum deviation data in the effective data are eliminated, further ensuring the accuracy and effectiveness of the measurement values obtained through arithmetic mean operation. The continuous measurement of the progress of the fully mechanized working face is achieved. The ground test results show that the maximum error of ranging substation 1 is 0.32 m, and the proportion of errors less than 0.2 m is 84.62%. The maximum error of distance measurement substation 2 is 0.48 m, and the proportion of errors less than 0.2 m is 76.92%. The industrial underground test results show that the difference between the daily average advance degree of the system and the measured data of the coal mine is 0.13 m. The result proves the feasibility of UWB ranging technology in underground roadway conditions and the accuracy of the pushing progress measurement model based on coal mining technology.
Key words: fully mechanized working face; pushing progress measurement; UWB ranging; bilateral bidirectional ranging method; limited amplitude median average filtering model
0引言
綜采工作面的推進度(即工作面沿推進方向的推進距離)不僅可以反映工作面推進速度的快慢、計算工作面產量及實時確定工作面的開采位置[1-2],還與工作面開采過程中上覆巖層的變形移動、沖擊地壓的發生等息息相關[3-6]。翟新獻等[3]在研究綜放開采過程中礫巖層變形移動垮落特征、聲發射和震動加速度響應特征時,認為聲發射事件參數即最大幅值、振鈴計數和絕對能量均與工作面推進度有關。推進速度會影響工作面采空區自燃“三帶”范圍的變化,推進速度過慢、形成的漏風空間較大、采空區內遺煤量過大等均會加大采空區自然發火的可能性[7-9],同時推進度的變化也與瓦斯涌出量密切相關[10-11]。因此,如何快速準確地獲取綜采工作面的實時推進度信息至關重要,成為煤礦開采過程中的主要任務之一。
目前,針對綜采工作面推進度的測量問題,很多礦井采用人工測量方式,即工作面每割煤1刀后,由專職的驗收員對工作面兩巷的推移距離分別進行測量并記錄,這種人工測量方式最直接、最簡單,但需要設置專職人員,費時費力,同時由于每次測量的誤差,容易造成測量誤差的累加,導致數據不準確,并且人工測量已不滿足目前煤礦智能化、無人化的需求。部分礦井將采煤機和液壓支架每次的推移步距設定為固定值,通過記錄采煤機的割煤刀數,采用割煤刀數×推移步距的方式,計算得出綜采工作面推進度,但由于采煤機割煤進尺的變化,導致一段時間以后累計推進度不準確。為了解決上述累計測量誤差問題,部分學者利用綜采工作面液壓支架的推移油缸行程傳感器,通過數據處理,形成了工作面推進度算法,這種方式雖然精度較高,但存在傳感器損壞后無法重新計算的問題。
針對上述問題,本文提出了一種基于超寬帶(Ultra Wide Band,UWB)的綜采工作面推進度測量系統。基于 UWB 無線測距原理,研究了綜采工作面推進度的測量方案和計算方法,通過地面調試和井下試驗,建立了限幅中值平均濾波模型,完成了對海量實測數據的處理,實現了綜采工作面推進度的連續測量,解決了存在累計測量誤差和因傳感器損壞不能重新計算的問題。
1 UWB 測距原理
目前可應用于井下的距離測量技術主要包括 WiFi、紅外和激光等,但 WiFi 測距精度較低,不能滿足井下實際需求[12-13],紅外和激光測距易受粉塵、巷道起伏等條件影響而不能穩定、連續工作。UWB 具有系統復雜度低、抗干擾性能強、測量距離遠、測距精度高等優點,非常適合在井下采掘工作面、運輸巷道這類空間受限的工作區域使用[14-15]。
UWB 不需要使用傳統通信體制中的載波,而是通過發送和接收具有納秒或納秒級以下的極窄脈沖來傳輸數據,具有 GHz量級的帶寬,UWB 時域和幅度關系如圖1所示。
UWB 是通過飛行時間法(Time of Flight,TOF)來測距,原理如圖2所示。從發送端發射1個脈沖信號,信號打到物體后返回,接收端接收到發射信號后,計算兩者之間的時間差,通過脈沖信號前后的飛行時間乘以光速來實現物體之間距離的測量。
UWB 采用?TOF 測距時,發送端和接收端兩設備之間時間同步的精度直接影響測距精度,因此,采用雙邊雙向測距(Double Sided-Two-Way Ranging,DS?TWR)算法降低對時間同步精度的依賴,DS?TWR 測距原理如圖3所示[16-17]。發送端 A 收到的時間戳
在?DS?TWR 算法中,設備?A 在?t1時刻發送請求脈沖信號,經一段傳輸時間后,設備?B 在?t2時刻接收到該脈沖信號,在?t3時刻發送一個響應+請求脈沖信號,設備?A 在?t4時刻收到這個響應+請求脈沖信號,在?t5時刻再次發送一個請求脈沖信號,設備?B 在?t6時刻接收到這個請求脈沖信號,并通過響應脈沖告訴設備 A 這個時間戳 t6,完成一個完整的測距過程[18-19]。
2基于 UWB 的推進度測量方案
當綜采工作面位于開切眼時,工作面的推進度為0,隨著綜采工作面內采煤機向前采煤,布置于工作面內的液壓支架需逐步按照推進方向向前推進,也就是采煤機每向前割1刀煤,液壓支架向前推進1個推移步距,對及時暴露的頂板進行支護,以保證工作面內的頂板不會垮落,液壓支架后的頂板隨著液壓支架的推移而逐漸垮落,形成了采空區。采煤機每割1刀煤工作面向前推進的距離與液壓支架可向前推進的1個推移步距相等,可實現采煤機割1刀,液壓支架相應支護1個步距。綜采工作面采空區、未采區、工作面內液壓支架與采煤機布置、兩側巷道、推進度等關系如圖4所示。
綜采工作面一般包含上、下2條巷道,而由于采煤工藝、地質條件等因素的影響,工作面經常需通過加刀、減刀等方式來調整巷道1和巷道2的推進度,達到工作面調偽斜的目的,以滿足不同生產需求。因此,有必要對綜采工作面上、下2條巷道推進度進行實時監測,以期指導工作面穩定、精確生產。
2.1主要設備
考慮基于 UWB 的推進度測量系統的設備安裝、供電等條件,本文主要采用礦用本安型測距分站與測距標志卡組合的方式,通過無線通信實現對綜采工作面巷道推進度的實時測量,最后將測量的距離信息通過以太網上傳至服務器,進行數據分析計算。
1)礦用本安型測距分站。礦用本安型測距分站集成常規定位讀卡器、傳輸分站的功能,通過 UWB 識別測距標志卡,將獲得的信息通過以太網上傳至服務器。礦用本安型測距分站具有電源指示、上位通信信號指示、信號中斷后的數據存儲和續傳、時間標記等功能,可實現測距標志卡的精確定位與測距、雙向通信。在無遮擋、無同頻干擾情況下,與測距標志卡 UWB 信號單向最大無線通信距離為300 m。
2)測距標志卡。測距標志卡能夠發射無線編碼信息,通過 UWB 與測距分站雙向通信,同時,可輸出電池欠壓警告信號。它具有體積小、質量小、使用方便等特點,且可反復充電使用,無需配備供電電源,單次充電后可使用1個月以上,適用于煤礦井下無法供電且有瓦斯和煤塵危險的場所。
2.2基于 UWB 的推進度測量與安裝方案
在綜采工作面機頭、機尾第1臺液壓支架上安裝測距分站,測距分站可跟隨液壓支架而移動;在巷道內每隔一定距離均勻布置測距標志卡,測距標志卡懸掛于巷道內已知的坐標點上(巷道在掘進過程中會間隔一定距離布置已知坐標點,如每隔50 m 布置1個),測距分站與測距標志卡布置方案如圖5所示。
1)在巷道1內第1臺液壓支架上安裝測距分站1,在已知坐標點等距離布置測距標志卡11、測距標志卡12、測距標志卡13等;測距分站1與測距標志卡11、測距標志卡12、測距標志卡13無線通信,并進行測距。
2)在巷道2內第1臺液壓支架上安裝測距分站2,在已知坐標點等距離布置測距標志卡21、測距標志卡22、測距標志卡23等;測距分站2與測距標志卡21、測距標志卡22、測距標志卡23無線通信,并進行測距。
3)測距分站1不與巷道2內的測距標志卡通信,測距分站2不與巷道1內的測距標志卡通信。
4)當工作面即將開采到最近的測距標志卡位置時,撤掉該處測距標志卡并進行回收,后續標志卡接替進行巷道推進度的測量與計算,依此循環往復,不斷進行更替測量。
2.3推進度理論計算方法
推進度又可分為每刀推進度、單班推進度、單日推進度、累計推進度等。每刀推進度即為每割1刀煤工作面向前推進的距離;單班推進度為每個生產班工作面累計向前推進的距離;單日推進度為每天工作面向前推進的距離;累計推進度為工作面從切眼開始到當前累計向前推進的距離。以巷道2內的推進度測量為例,其測量計算方法如圖6所示。
1)累計推進度。采煤機每完成1次割煤循環,液壓支架向前移動1個步距,固定于液壓支架上的測距分站跟隨支架向前移動1個步距,通過布置于液壓支架上的測距分站與固定于巷道內的測距標志卡進行無線通信,計算出巷道2的累計推進度。
L = Sb - S c + Sz ????(1)
式中:L 為當前累計推進度;Sb 為測距標志卡到切眼煤壁的距離,為已知距離;Sc 為測距標志卡與測距分站之間的距離,為測量值,包括 Sc1和 Sc2,其中 Sc1為液壓支架推移前,測距標志卡與測距分站之間的距離,Sc2為液壓支架推移后,測距標志卡與測距分站之間的距離;Sz 為測距分站與煤壁之間的距離,工作面液壓支架布置完成后為固定值。
2)每刀推進度。工作面的每刀推進度可以用割煤前后測距分站與測距標志卡測量前后值的變化來計算。
Lm = S c1- S c2 ????(2)
式中 Lm 為工作面每刀推進度。
3)任意時段推進度。選取任意時間段,統計時間戳在該時間段內的每刀推進度,累計求和后即為該時間段的推進度。
Lf =ΣLm ?????(3)
式中 Lf 為任意時間段內的累計推進度。
通過任意時段推進度計算方法,可知單班推進度為本班內所有割煤刀數推進度累加計算,單日推進度為本日內所有割煤刀數推進度累加計算。
2.4推進度數據分析算法模型
由于 Sb 與 Sz 均為固定值,為了準確計算工作面累計推進度、每刀推進度及任意時間段推進度,需通過數據處理分析計算隨工作面開采而實時變化的 Sc。目前針對數據處理的數學模型主要有限幅濾波法、中值濾波法、算術平均濾波法、中值平均濾波法、限幅平均濾波法等[20-22]。限幅濾波法只能對異常數據進行處理。中值濾波法只能排除數據組中的最大值與最小值。算術平均濾波法對快速變化的信號響應較慢,可能無法很好地保留信號的快速變化部分。中值平均濾波法在排除數據組中最大值與最小值后,對其余數據進行平均處理,但存在沒有剔除原數據組中的超幅異常數據的問題。限幅平均濾波法雖然將數據組中的超幅數據剔除后再進行算術平均,但仍存在最大值與最小值對平均值的影響。
針對上述問題,結合采煤工藝,建立了依據采煤機位置和液壓支架動作的限幅中值平均濾波模型,將限幅濾波、中值濾波、算術平均濾波進行深度融合,完成了對海量實測數據的處理,實現了綜采工作面推進度的連續測量。模型算法流程如圖7所示。
1)收集推進度測量系統海量的無規律數據,并對其進行存儲。
2)根據采煤機位置、液壓支架動作,對存儲的數據按照相同的割煤刀數進行數據組劃分。
3)對同一割煤刀內的數據進行限幅判斷,當數據組內數據大于設定限幅時,對其進行剔除。
4)進行數據中值篩選,剔除數據中的最大值和最小值。
5)對剩余的數據進行算術平均運算,最終得出本次測量值 Sc。
通過限幅中值平均濾波模型可排除海量數據中由于受到測量、遮擋等影響而造成的測量偏差較大的無效數據,同時消除了有效數據中的最大和最小偏差數據,進一步保證了通過算術平均運算得到的測量值 Sc 的準確性和有效性。
3基于 UWB 的推進度測量系統應用試驗
3.1試驗概況
基于 UWB 的推進度測量系統由上位機控制系統和 UWB 測量系統構成,如圖8所示。上位機采用 TCP(客戶端)模式,連接測距分站,主動下發命令獲取距離數據;測距分站采用 TCP(服務器)模式,收到上位機獲取數據命令后回發距離數據;測距分站與測距標志卡之間通過 UWB 無線信號進行實時測距。
3.2地面調試
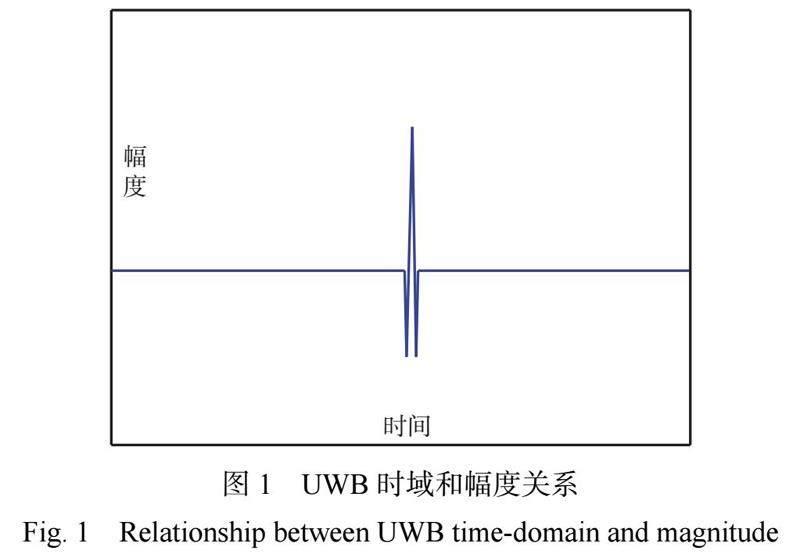
為了保證基于 UWB 的推進度測量系統在井下的穩定運行,同時檢驗該系統距離測量的準確性,首先在地面對該系統進行測試,并利用激光測距儀測量結果與基于 UWB 的推進度測量系統所測結果進行對比。地面調試流程如圖9所示。
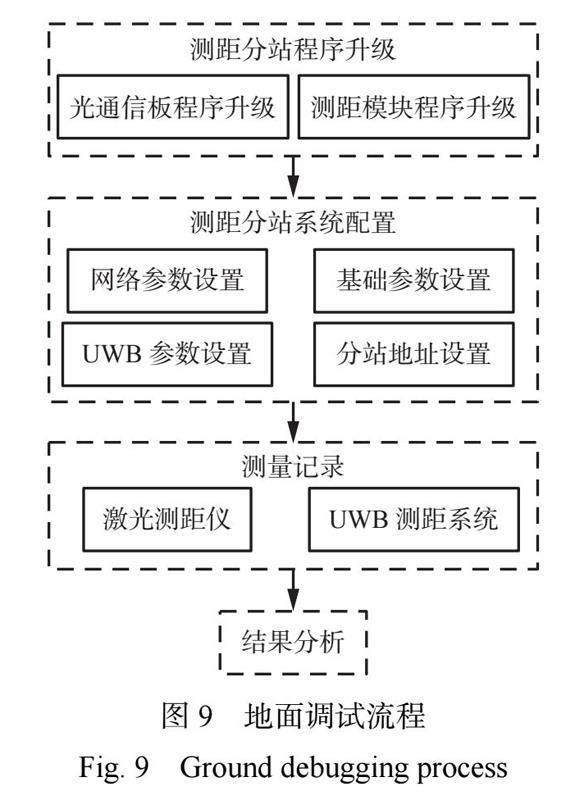
首先對測距分站(光通信板和測距模塊)進行設備升級,在升級過程中會顯示升級請求響應、升級步驟等,程序升級完成后顯示“正常運行”。然后打開UWB Configurator 軟件對測距分站的網絡參數、基礎參數、UWB 參數、分站地址等參數進行配置。最后搭建測試平臺,利用激光測距儀與基于 UWB 的推進度測量系統對不同距離的物體進行測量,并將測量結果進行對比分析。地面測試結果見表1。
從表1可看出,測距分站1的最大誤差為0.32 m,誤差超過0.3 m 的占比為7.69%,誤差為0.2~0.3 m 的占比為7.69%,誤差小于0.2 m 的占比為84.62%;測距分站2的最大誤差為0.48 m,誤差超過0.3 m 的占比為7.69%,誤差為0.2~0.3 m 的占比為15.38%,誤差小于0.2 m 的占比為76.93%。UWB 測距系統與激光測距儀的測量結果相比,誤差超過0.3 m 的占比很小,誤差基本上均小于0.2 m,2個測距分站誤差小于0.2 m 的占比均超過75%。
3.3井下應用
為了驗證基于 UWB 的推進度測量系統在井下實際巷道條件下的使用狀況,在陜煤集團黃陵某礦綜采工作面巷道進行井下工業性試驗。該工作面巷道長度為2880 m,巷道起伏較小,一般為0~5°, 巷道掘進過程中,每間隔50 m設置1處巷道長度標志點,以記錄工作面巷道長度和指導后期工作面開采位置測量,試驗巷道地質條件見表2。
根據試驗工作面井下支架布置和巷道情況,在端頭支架安裝測距分站和天線,在巷道頂端懸掛測距標志卡,具體安裝如圖10所示。
2023年6月2日—25日,在試驗巷道進行了推進度測量連續試驗,對所測量的當日推進度進行統計分析,并與礦方實測推進度進行對比。基于 UWB 的推進度測量系統測量與礦方實測當日推進度如圖11所示,當日推進度差值統計如圖12所示。
由圖11和圖12可看出,試驗期間,基于 UWB的推進度系統測量日平均推進度為11.78 m,礦方實測日平均推進度為11.65 m,日平均推進度差值為0.13 m。當日推進度統計中,最大差值出現在測距標志卡更換當日,為2.21 m,最小差值為0.01 m。這是由于巷道位置點人工懸掛不準,導致了當日產生較大的偏差。6月2日—25日,基于 UWB 的推進度測量系統測量累計推進度為259.21 m,礦方實測累計推進度為256.20 m,累計偏差為3.01 m。
4結論
1)基于 UWB 測距原理,研究綜采工作面推進度的測量方案和計算方法,通過開展地面調試和井下試驗,建立限幅中值平均濾波模型,完成了對實測數據的處理,最終實現了對綜采工作面推進度的連續測量。
2)地面測試結果表明,測距分站1的最大誤差為0.32 m,誤差小于0.2 m 的占比為84.62%;測距分站2的最大誤差為0.48 m,誤差小于0.2 m 的占比為76.92%。
3)井下工業性試驗結果表明,基于 UWB 的推進度測量系統與礦方實測數據的日平均推進度差值為0.13 m,滿足井下推進度連續測量的需求。
參考文獻(References):
[1]劉正.基于支架推移油缸行程的綜采面推進距離算法研究[J].陜西煤炭,2022,41(5):113-117.
LIU Zheng. Research on algorithm of advancing distance of fully mechanized mining face based on the support pushing cylinder stroke[J]. Shaanxi Coal,2022,41(5):113-117.
[2]朱朋飛,郭龍真.基于機器視覺的煤礦井下工作面推進度智能識別方法[J].煤礦機械,2023,44(8):200-203.
ZHU Pengfei,GUO Longzhen. Intelligent recognition method of advancing degree of coal mine underground working face based on machine vision[J]. Coal Mine Machinery,2023,44(8):200-203.
[3]翟新獻,趙曉凡,郭釗洋,等.綜放開采上覆巨厚礫巖層變形垮落沖擊相似模擬研究[J].采礦與安全工程學報,2023,40(5):1018-1030.
ZHAI Xinxian,ZHAO Xiaofan,GUO Zhaoyang,et al. Similar simulation study on deformation and collapsing impact of overlying hugely-thick conglomerate stratumin longwall top-coal caving mining[J]. Journal of Mining & Safety Engineering,2023,40(5):1018-1030.
[4]王朝引.回采速度對厚煤層綜采工作面沖擊顯現的影響[J].煤炭科學技術,2019,47(8):96-101.
WANG Chaoyin. Effect of mining speed on bump manifestation of fully-mechanized mining face in deep and thick coal seam [J]. Coal Science and Technology,2019,47(8):96-101.
[5]趙同彬,郭偉耀,韓飛,等.工作面回采速度影響下煤層頂板能量積聚釋放分析[J].煤炭科學技術,2018,46(10):37-44.
ZHAO Tongbin, GUO Weiyao, HAN Fei, et al. Analysis on energy accumulation and release of roof under influence of mining speed[J]. Coal Science and Technology,2018,46(10):37-44.
[6]劉金海,孫浩,田昭軍,等.煤礦沖擊地壓的推采速度效應及其動態調控[J].煤炭學報,2018,43(7):1858-1865.
LIU Jinhai,SUN Hao,TIAN Zhaojun,et al. Effect of advance speed on rock burst in coal mines and its dynamic control method[J]. Journal of China Coal Society,2018,43(7):1858-1865.
[7]李生鑫,孫珍平,劉春剛.基于通風量與推進度的采空區自然發火數值模擬[J].煤礦安全,2020,51(9):196-200.
LI Shengxin,SUN Zhenping,LIU Chungang. Numerical simulation of spontaneous combustion in goaf based on ventilation and advancing degree[J]. Safety in Coal Mines,2020,51(9):196-200.
[8]曹拓拓,宣德全,范振.易自燃煤層低推進度綜放工作面采空區自燃防治技術[J].煤礦安全,2014,45(12):92-95.
CAO Tuotuo, XUAN Dequan, FAN Zhen. Goaf spontaneous ?combustion ?control ?technology ?of mechanized face of spontaneous combustion coal seam with low advance degree[J]. Safety in Coal Mines,2014,45(12):92-95.
[9]姜希印.易自燃孤島工作面安全推進速度研究[J].工礦自動化,2019,45(12):7-11.
JIANG Xiyin. Research on safe advancing speed of spontaneous combustion isolated working face[J]. Industry and Mine Automation,2019,45(12):7-11.
[10]季文博,齊慶新,李宏艷,等.沙曲礦單一工作面推進度與瓦斯涌出量關系研究[J].煤炭工程,2012,44(12):95-98.
JI Wenbo,QI Qingxin,LI Hongyan,et al. Study on relationship between advancing rate of single coal mining face and gas emission value in Shaqu Mine[J]. Coal Engineering,2012,44(12):95-98.
[11]肖寒撼,李維光,華道友,等.單一煤層采煤工作面瓦斯抽采量與推進度之間關系研究[J].中國煤炭,2018,44(3):140-142,146.
XIAO Hanhan,LI Weiguang,HUA Daoyou,et al. Study on the relationship between advance rate and gas drainage volume of single coal seam work face[J]. China Coal,2018,44(3):140-142,146.
[12]鄧小明,鄧志龍.基于 UWB 技術的煤礦無線傳感器網絡設計研究[J].煤炭技術,2023,42(6):244-247.
DENG Xiaoming,DENG Zhilong. Design and research of coal mine wireless sensor network based on UWB technology[J]. Coal Technology,2023,42(6):244-247.
[13]薛光輝,李圓,張云飛.基于激光靶向跟蹤的懸臂式掘進機位姿測量系統研究[J].工礦自動化,2022,48(7):13-21.
XUE Guanghui,LI Yuan,ZHANG Yunfei. Research on pose measurement system of cantilever roadheader based on laser target tracking[J]. Journal of Mine Automation,2022,48(7):13-21.
[14]王俊秀. UWB 測距技術在煤礦井下的應用[J].煤礦機械,2023,44(9):145-147.
WANG Junxiu. Application of UWB ranging technology in underground coal mine[J]. Coal Mine Machinery,2023,44(9):145-147.
[15]丁震,張雨晨.煤礦井下粉塵濃度對 UWB 測距精度的影響研究[J].工礦自動化,2021,47(11):131-134.
DING Zhen, ZHANG Yuchen. Research on the influence of coal mine dust concentration on UWB ranging precision[J]. Industry and Mine Automation,2021,47(11):131-134.
[16]陳偉.基于 UWB 技術的煤礦精確定位系統[J].煤礦機械,2023,44(5):177-180.
CHEN Wei. Coal mine precise positioning system based on UWB technology[J]. Coal Mine Machinery,2023,44(5):177-180.
[17]郭愛軍.基于 UWB 的 PDOA 與 TOF 煤礦井下聯合定位方法[J].工礦自動化,2023,49(3):137-141.
GUO Aijun. A joint positioning method of PDOA and TOF in coal mines based on UWB[J]. Journal of Mine Automation,2023,49(3):137-141.
[18]郁露,唐超禮,黃友銳,等.基于 UWB 和 IMU 的煤礦機器人緊組合定位方法研究[J].工礦自動化,2022,48(12):79-85.
YU Lu,TANG Chaoli,HUANG Yourui,et al. Research on tightly combined positioning method of coal mine robot based on UWB and IMU[J]. Journal of Mine Automation,2022,48(12):79-85.
[19]任昊譽,郭晨霞,楊瑞峰.卡爾曼濾波提高 UWB 測距精度研究[J].電子測量技術,2021,44(18):111-115.
REN Haoyu,GUO Chenxia,YANG Ruifeng. Research on improving UWB ranging accuracy by Kalman filter[J]. Electronic Measurement Technology,2021,44(18):111-115.
[20]泰勒.數字濾波器原理及應用[M].北京:國防工業出版社,2013.
TAYLOR F J. The principle and application of digital filter[M]. Beijing:National Defence Industry Press,2013.
[21]唐麗均,吳畏,劉世森.基于灰色預測模型的井下精確人員定位方法[J].工礦自動化,2021,47(8):128-132.
TANG Lijun,WU Wei,LIU Shisen. Precise personnel positioning method in underground mine based on grey prediction model[J]. Industry and Mine Automation,2021,47(8):128-132.
[22]張倩.基于改進偽中值濾波和非局部均值濾波的紅外圖像濾波方法[J].工礦自動化,2014,40(12):57-60.
ZHANG Qian. A filtering method for infrared image based on improved pseudo median filtering and non- local ?means ?filtering[J]. Industry ?and ?Mine Automation,2014,40(12):57-60.
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20