基于數據驅動的范數最優迭代學習控制
2024-05-23 08:35:27許萬肖迪陳婷薇
湖北工業大學學報 2024年2期
許萬 肖迪 陳婷薇
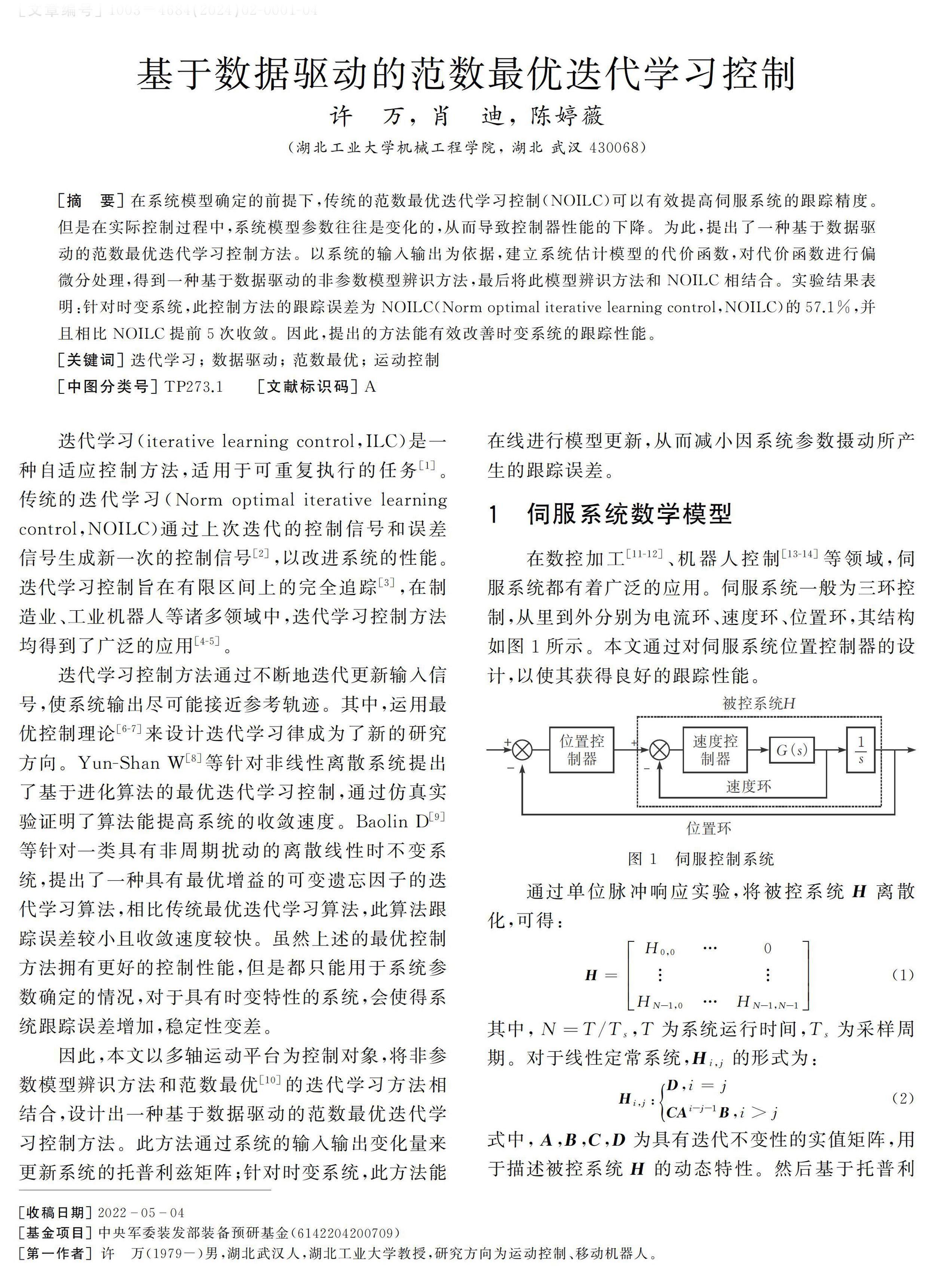

[摘要] 在系統模型確定的前提下,傳統的范數最優迭代學習控制(NOILC)可以有效提高伺服系統的跟蹤精度。但是在實際控制過程中,系統模型參數往往是變化的,從而導致控制器性能的下降。為此,提出了一種基于數據驅動的范數最優迭代學習控制方法。以系統的輸入輸出為依據,建立系統估計模型的代價函數,對代價函數進行偏微分處理,得到一種基于數據驅動的非參數模型辨識方法,最后將此模型辨識方法和NOILC相結合。實驗結果表明:針對時變系統,此控制方法的跟蹤誤差為NOILC(Norm optimal iterative learning control,NOILC)的57.1%,并且相比NOILC提前5次收斂。因此,提出的方法能有效改善時變系統的跟蹤性能。
[關鍵詞] 迭代學習; 數據驅動; 范數最優; 運動控制
[中圖分類號] TP273.1[文獻標識碼] A
