車載探地雷達(dá)技術(shù)在地鐵隧道檢測中的應(yīng)用
2024-05-17 11:56:30高洪清劉華云
計算機(jī)測量與控制 2024年4期
曹 志,高洪清,王 威,劉華云
(1.中車南京浦鎮(zhèn)車輛有限公司,南京 210000;2.南京航空航天大學(xué) 經(jīng)濟(jì)管理學(xué)院,南京 210016;3.南京軌道交通產(chǎn)業(yè)發(fā)展有限公司,南京 210000;4.成都唐源電氣股份有限公司,成都 610000)
0 引言
地鐵隧道是城市交通中十分重要的組成部分,因此對于地鐵隧道的維護(hù)和檢測至關(guān)重要。然而,隧道結(jié)構(gòu)和地質(zhì)情況的復(fù)雜性使得地鐵隧道的檢測和維護(hù)變得異常關(guān)鍵[1-2]。車載探地雷達(dá)是一種以雷達(dá)技術(shù)為基礎(chǔ)的設(shè)備,可以通過發(fā)射和接收電磁波來探測和分析地下物體的特征。它具有非接觸、快速、高分辨率等特點(diǎn),能夠有效地識別地下障礙物,并提供有關(guān)地下結(jié)構(gòu)和土壤情況的詳細(xì)信息。孟繁龍等人將探地雷達(dá)安裝在不同的載具上對地形進(jìn)行檢測。通過比較監(jiān)測點(diǎn)的點(diǎn)云數(shù)據(jù)發(fā)現(xiàn),不同的地形應(yīng)用不同的載具雷達(dá)技術(shù),可以獲得不同的檢測效果[3]。利用車載探地雷達(dá),可以對地下的排水系統(tǒng)、管線等進(jìn)行全面的檢測和評估。He等人采用圖像熵理論對地面進(jìn)行描述,探索混合介質(zhì)中探地雷達(dá)的檢測性能。通過仿真實(shí)驗(yàn)顯示,探地雷達(dá)能夠在不同的介質(zhì)中取得良好的檢測性能[4]。為了提升地鐵隧道缺陷檢測的精準(zhǔn)度和檢測效率,此次研究采用空氣耦合天線作為雷達(dá)天線,并對車載探地雷達(dá)技術(shù)進(jìn)行詳細(xì)研究。針對雷達(dá)信號和雷達(dá)圖像存在的噪聲,采用零時校正、去直流、背景去除和圖像增益方法進(jìn)行圖像和信號的去噪處理。在車載探地雷達(dá)技術(shù)中采用Yolov5目標(biāo)檢測模型,并引入SPP-Bottleneck模塊對Yolov5目標(biāo)檢測模型進(jìn)行改進(jìn),構(gòu)建基于Yolov5模型的車載探地雷達(dá)檢測系統(tǒng),提升了原始車載雷達(dá)技術(shù)的探測精度。
1 車載探地雷達(dá)技術(shù)和地鐵隧道檢測研究
1.1 車載探地雷達(dá)技術(shù)研究
車載探地雷達(dá)技術(shù)是一種利用雷達(dá)波束對地下進(jìn)行快速探測和成像的技術(shù),該技術(shù)采用車載裝置搭載在車輛上,通過發(fā)射探測波束并接收反射信號,獲取地下目標(biāo)的信息。車載探地雷達(dá)技術(shù)具有非接觸式、快速、高效、廣泛適用性等特點(diǎn),被廣泛應(yīng)用于地下管線探測、隧道掃描、地質(zhì)勘探、城市規(guī)劃等領(lǐng)域。在地鐵的隧道監(jiān)測中,車載探地雷達(dá)技術(shù)采用掃描式探測,可以在行駛過程中實(shí)時獲取地下信息,快速全面地掌握隧道周圍地下情況,提高施工效率。載探地雷達(dá)技術(shù)能夠獲得高精度的地下目標(biāo)信息,包括地質(zhì)層位、管線位置、隧道結(jié)構(gòu)變化等,可以提供詳盡且準(zhǔn)確的隧道地質(zhì)信息[5]。車載探地雷達(dá)技術(shù)具有廣泛的應(yīng)用范圍,可以對較大范圍的地下進(jìn)行快速掃描,有效掌握隧道周邊的地下情況。車載探地雷達(dá)技術(shù)可以實(shí)時監(jiān)測隧道周圍地下的變化情況,包括地質(zhì)變形、管線移位、水位變化等,及時發(fā)現(xiàn)問題并采取相應(yīng)的措施,保證隧道的安全運(yùn)行[6]。探地雷達(dá)檢測的原理如圖1所示。
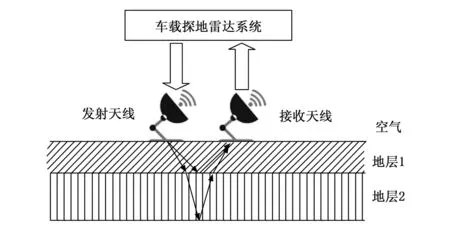
圖1 探地雷達(dá)檢測的原理圖
車載探地雷達(dá)系統(tǒng)通過發(fā)射器產(chǎn)生探測波束,探測波束通常為微波頻段的電磁波,具有一定的能量和頻率[7]。探測波束在發(fā)射后遇到地下目標(biāo),如地下管線、地質(zhì)層位、隧道結(jié)構(gòu)等,會發(fā)生反射或散射,車載雷達(dá)系統(tǒng)通過接收器接收并記錄這些信號,如式(1)所示:
(1)
式中,t為電磁波發(fā)射以及雷達(dá)系統(tǒng)接收的時間,h為地下檢測目標(biāo)到雷達(dá)系統(tǒng)的距離,a為天線的長度,v為探測波束在不同介質(zhì)中的傳播速度。車載雷達(dá)系統(tǒng)通過分析接收到的反射信號的時間延遲和波形特征,可以計算出不同地下目標(biāo)與車輛之間的距離,這樣就可以獲得地下目標(biāo)的位置和深度信息,探測的深度如式(2)所示:
(2)
式中,d為車載探測雷達(dá)的最大探測深度,λ為探測波束在介質(zhì)中的主頻波波長,a為衰減系數(shù),σc為地下檢測目標(biāo)的散射面積,Csystem為雷達(dá)系統(tǒng)的靈敏度和最大發(fā)射功率的比值。車載探地雷達(dá)的深度取決于多個因素,包括發(fā)射頻率、接收靈敏度和地下目標(biāo)的性質(zhì)等。通常情況下,較低頻率的雷達(dá)系統(tǒng)可以達(dá)到較大的探測深度,但分辨率可能較低。高頻率的雷達(dá)系統(tǒng)則可以提供較高的分辨率,但探測深度相對較淺。實(shí)際應(yīng)用中,可以根據(jù)需求選擇適當(dāng)?shù)睦走_(dá)頻率,以平衡深度和分辨率的要求。探地雷達(dá)的水平分辨率和垂直分辨率是衡量雷達(dá)系統(tǒng)探測能力的兩個重要指標(biāo),分為水平和垂直兩種分辨率。水平分辨率是指雷達(dá)系統(tǒng)在水平方向上對地下目標(biāo)的分辨能力,通常用于描述雷達(dá)系統(tǒng)在側(cè)向探測時的能力[8]。水平分辨率取決于雷達(dá)系統(tǒng)發(fā)射波束的寬度和接收信號的處理方式,較小的波束寬度可以提供更好的水平分辨率,即能夠更好地識別并區(qū)分水平方向上的近鄰地下目標(biāo)。垂直分辨率是指雷達(dá)系統(tǒng)在垂直方向上對地下目標(biāo)的分辨能力,通常用于描述雷達(dá)系統(tǒng)在深度方向探測時的能力。垂直分辨率取決于雷達(dá)系統(tǒng)發(fā)射波束的垂直角度范圍和接收信號的處理方式,較小的垂直角度范圍可以提供更好的垂直分辨率,即能夠更準(zhǔn)確地識別并區(qū)分不同深度的地下目標(biāo)。分辨率計算的相關(guān)公式如式(3)所示:
(3)
式中,Δl為兩個檢測目標(biāo)在水平方向上的最短距離,λ為探測波束的波長,h為地下檢測目標(biāo)距離地表的深度,fc為雷達(dá)天線的頻率,Δt為探測波束在兩個檢測目標(biāo)之間傳播的時間差。采用合適的天線設(shè)計,有利于分辨率的提升。空氣耦合天線是一種常用于車載探地雷達(dá)系統(tǒng)的天線類型,是一種非接觸性的天線,通過空氣感應(yīng)的方式與地下目標(biāo)進(jìn)行信號交互[9-10]。空氣耦合天線的水平分辨率取決于其發(fā)射和接收波束的寬度,接收波束的寬度與天線的接收特性有關(guān)。通常情況下,較窄的發(fā)射和接收波束可以提供較高的水平分辨率,使雷達(dá)系統(tǒng)能夠更好地區(qū)分并識別水平方向上的近鄰地下目標(biāo)。空氣耦合天線的垂直分辨率取決于其發(fā)射和接收波束的垂直角度范圍,接收波束的垂直角度范圍與天線的接收特性有關(guān)。通常情況下,較小的垂直角度范圍可以提供較高的垂直分辨率,使雷達(dá)系統(tǒng)能夠更準(zhǔn)確地識別不同深度的地下目標(biāo)。
1.2 車載探地雷達(dá)信號處理
雷達(dá)圖像處理是對車載探地雷達(dá)系統(tǒng)獲取的原始雷達(dá)信號進(jìn)行處理和分析,以生成可視化的地下目標(biāo)圖像或定量化的地下目標(biāo)信息。雷達(dá)圖像和信號去噪是在雷達(dá)信號處理中非常重要的步驟之一。去噪的目的是降低或消除信號中的噪聲成分,以提高雷達(dá)圖像的質(zhì)量和可靠性。去噪可以幫助識別和提取目標(biāo)信號,減少誤識別和誤檢測的可能性,并提高雷達(dá)系統(tǒng)的性能。對原始雷達(dá)信號進(jìn)行預(yù)處理,包括去除噪聲、補(bǔ)償傳輸損失、校正時間延遲等,可以采用濾波、增益調(diào)整和零時校正等方法實(shí)現(xiàn)[11]。零時校正是車載探地雷達(dá)系統(tǒng)中的一個重要步驟,用于校正天線和接收通道之間的時間差。在雷達(dá)系統(tǒng)中,發(fā)射的電磁波需要一定的時間才能到達(dá)地下目標(biāo)并返回接收系統(tǒng)。這種時間差會在成像結(jié)果中引入誤差。零時校正通過確定由雷達(dá)接收到的第一個有效信號的時間,來補(bǔ)償發(fā)射和接收之間的時間差,確保成像結(jié)果的準(zhǔn)確性。常見的零時校正方法分為硬件零時校正和軟件零時校正,硬件零時校正通過電纜長度和信號傳輸速度等參數(shù)來計算和修正發(fā)射和接收之間的時間差,軟件零時校正通過分析接收到的信號波形,并確定最早接收到的有效信號的時間點(diǎn)來進(jìn)行校正[12]。在實(shí)際應(yīng)用中,雷達(dá)圖像處理有很多技術(shù)和方法可供選擇,如波束形成、多通道處理、數(shù)據(jù)融合等[13-14]。具體的圖像處理流程和算法選擇通常根據(jù)應(yīng)用需求、地下環(huán)境條件、雷達(dá)系統(tǒng)特性等因素進(jìn)行優(yōu)化和調(diào)整。在雷達(dá)圖像處理中,去直流和背景去除是常見的預(yù)處理步驟,用于除去圖像中的直流成分和背景噪聲,以便更準(zhǔn)確地分析和識別地下目標(biāo)[15-16]。去直流和背景去除公式如式(4)所示:
(4)
y=bc(x-a)-1
(5)
式中,b和c為參數(shù),用于控制曲線的形狀。a為參數(shù),用于控制曲線的左右偏移量。指數(shù)變換的參數(shù)可以根據(jù)具體應(yīng)用需求來選擇,可以降低幅度信號放大并壓制高幅度信號。指數(shù)變換常用于處理信號的壓縮和擴(kuò)展,以及調(diào)整信號的動態(tài)范圍。通過上述的信號預(yù)處理和圖像增益的方法,可以提高空氣耦合天線的水平和垂直分辨率,去除圖像中的噪聲,從而提升車載探地雷達(dá)系統(tǒng)的探測能力和成像效果。
1.3 目標(biāo)檢測模型在地鐵隧道檢測中的研究
為了實(shí)現(xiàn)對地鐵隧道中的缺陷檢測研究,在車載探地雷達(dá)中引入Yolov5(Yolov5,you only look once version 5)模型,提高檢測的準(zhǔn)確率。Yolov5采用了基于主干網(wǎng)絡(luò)為CSPDarknet53(CSPDarknet53,cross stage partial Darknet53)的網(wǎng)絡(luò)架構(gòu),相比于YOLOv4的Darknet53,CSPDarknet53具有更高的效率和準(zhǔn)確性。CSPDarknet53是一種深度殘差網(wǎng)絡(luò)模型,由多個殘差塊(Residual Block)和CSP連接組成,每個殘差塊由一個1×1卷積層、一個3×3卷積層和一個殘差連接(Residual Connection)組成。殘差連接將輸入特征與輸出特征進(jìn)行相加,有助于更好地傳遞梯度和優(yōu)化信息的流動。CSP連接將特征圖劃分為兩個部分,分別通過1×1卷積層進(jìn)行處理。一部分繼續(xù)向后傳遞,另一部分通過一系列的殘差塊和卷積層進(jìn)行處理,之后再與前一部分進(jìn)行合并,這種結(jié)構(gòu)可以提高特征的復(fù)用和傳遞,同時減少參數(shù)量。因此,Yolov5的CSPDarknet53主干網(wǎng)絡(luò)采用了殘差塊和CSP連接的結(jié)構(gòu),通過逐漸減小特征圖的尺寸和增加通道數(shù),高效地提取多尺度的特征,這種主干網(wǎng)絡(luò)設(shè)計使得Yolov5在目標(biāo)檢測任務(wù)中具有更高的準(zhǔn)確性和效率。Yolov5網(wǎng)絡(luò)模型結(jié)構(gòu)如圖2所示。
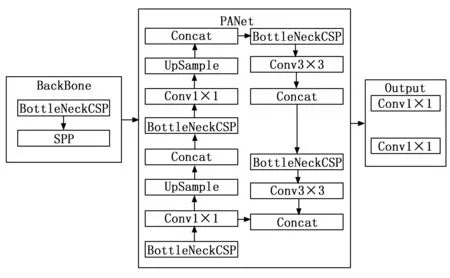
圖2 Yolov5網(wǎng)絡(luò)模型結(jié)構(gòu)圖
在Yolov5網(wǎng)絡(luò)模型中,與其他深度學(xué)習(xí)網(wǎng)絡(luò)模型的區(qū)別在于引入了一個特征網(wǎng)絡(luò)金字塔。特征金字塔網(wǎng)絡(luò)(FPN,feature pyramid network)主要用于解決目標(biāo)檢測中不同尺度目標(biāo)的檢測問題,其特征是包含一個自頂向下的路徑(Top-down Pathway)和一個自下向上的路徑(Bottom-up Pathway)來提取多尺度的特征信息。為了解決圖像失真的問題,引入SPP-Bottleneck(SPP-Bottleneck,spatial pyramid pooling-Bottleneck)模塊,該模塊是一種常用的神經(jīng)網(wǎng)絡(luò)模塊,用于處理具有不同尺度特征的圖像。SPP-Bottleneck結(jié)合了SPP(Spatial Pyramid Pooling)和Bottleneck結(jié)構(gòu),旨在提取多尺度的特征并減少網(wǎng)絡(luò)的參數(shù)和計算量。Bottleneck結(jié)構(gòu)一般由一個1×1的卷積層、一個3×3的卷積層和一個1×1的卷積層組成,作用是通過降維和升維來減少網(wǎng)絡(luò)的參數(shù)和計算量。在目標(biāo)檢測任務(wù)中,錨框(Anchor Box)是一種用于定義候選目標(biāo)框的策略,通過在圖像上按照一定的尺度和寬高比生成一系列固定大小的框,用于在不同位置和尺度上框選出可能包含目標(biāo)的區(qū)域。首先根據(jù)具體任務(wù)和數(shù)據(jù)集的特點(diǎn),選擇一組適當(dāng)?shù)某叨群蛯捀弑龋ǔ#^框會在多個尺度和多個寬高比上進(jìn)行生成,以覆蓋不同大小和形狀的目標(biāo)。錨框生成公式見式(6):
(6)
式中,h和w分別為錨框的高度和寬度,R為設(shè)置的錨框變換比例,ratio為錨框的寬和高度之比,s為錨框的面積。將生成的錨框應(yīng)用于圖像的所有可能位置,以獲得一系列候選框。通常,錨框會在圖像的每個像素位置進(jìn)行生成,以檢測不同位置的目標(biāo)。將生成的錨框與真實(shí)的目標(biāo)框進(jìn)行匹配,以確定哪些錨框是正樣本(Positive Anchor),即與目標(biāo)框有較高的重疊率,并進(jìn)行相應(yīng)的分類和回歸任務(wù),通常使用一定的閾值來判斷錨框與真實(shí)目標(biāo)框之間的重疊程度。通過錨框的生成,目標(biāo)檢測算法可以在不同的位置和尺度上搜索潛在的目標(biāo)框,從而提高檢測的準(zhǔn)確性和魯棒性。同時,由于錨框的固定尺度和寬高比,可以減少計算量,提高算法的效率。CIoU(Complete Intersection over Union)損失函數(shù)是一種目標(biāo)檢測任務(wù)中常用的損失函數(shù),用于度量預(yù)測框和真實(shí)框之間的差異。CIoU計算公式如式(7)所示:
(7)
式中,β為一個修正參數(shù),ρ為歐幾里得距離,γ為衡量參數(shù),b為預(yù)測框的中心點(diǎn),bgt為目標(biāo)框的中心點(diǎn),c為預(yù)測框和目標(biāo)框交集部分的對角線距離。在目標(biāo)檢測任務(wù)中,采用CIoU損失函數(shù)來指導(dǎo)模型的訓(xùn)練,使模型能夠更準(zhǔn)確地預(yù)測目標(biāo)框并提高檢測性能。檢測模型識別缺陷流程如圖3所示。
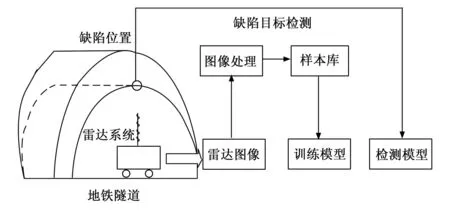
圖3 隧道檢測模型檢測缺陷流程圖
2 地鐵隧道目標(biāo)檢測模型性能測試與實(shí)例分析
2.1 地鐵隧道目標(biāo)檢測模型性能測試
為了測試Yolov5模型在車載探地雷達(dá)中的性能,操作系統(tǒng)選擇Windows10系統(tǒng),CPU為Intel(R)CoreTMi9-10900CPU@2.80 GHz,GPU為NVIDIA GeForce RTX 2060,系統(tǒng)的內(nèi)存為32 GB。初始學(xué)習(xí)率設(shè)置為0.001,批數(shù)量設(shè)置為4,迭代次數(shù)設(shè)置為80次,動量因子數(shù)值設(shè)置為0.937,衰減因子設(shè)置為0.000 5。采用車載探地雷達(dá)技術(shù)對某地地鐵隧道中拱頂存在的空洞和鋼筋結(jié)構(gòu)脫空數(shù)據(jù)進(jìn)行采集,其中空洞面積大小在0.50~2.0 m2之間,深度在0.05~0.18 m之間。鋼筋結(jié)構(gòu)脫空面積大小在0.08~0.50 m2之間,深度在0.05~0.32 m之間,共計100個數(shù)據(jù)。將改進(jìn)前的Yolov5模型與引入SPP-Bottleneck模塊的Yolov5模型在隧道空洞和鋼筋結(jié)構(gòu)脫空數(shù)據(jù)集中進(jìn)行對比測試,采用Precision和Recall數(shù)值作為測試指標(biāo),繪制P-R曲線如圖4所示。
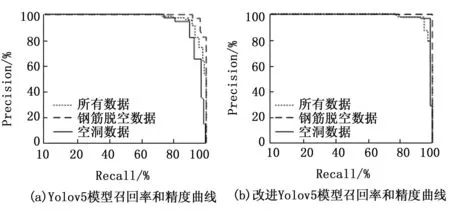
圖4 Yolov5模型改進(jìn)前后的召回率和精度曲線
圖4(a)為改進(jìn)前的Yolov5模型的召回率和精度的曲線,圖4(b)為改進(jìn)后的Yolov5模型的召回率和精度的曲線。召回率越高,精度越低;召回率越低,精度越高,兩者呈現(xiàn)反比線性關(guān)系。召回率和精度之間的比值反映了Yolov5模型對地鐵隧道目標(biāo)檢測的檢測能力,因此,曲線與坐標(biāo)軸之間圍成的面積越大,檢測的能力越強(qiáng),面積越小,檢測的能力越弱。從圖4中可以看出,引入SPP-Bottleneck模塊后的Yolov5模型,在不同數(shù)據(jù)測試下的召回率和精度曲線與坐標(biāo)軸之間圍成的面積,均大于改進(jìn)前的Yolov5模型。因此,引入SPP-Bottleneck模塊的Yolov5模型能夠處理不同類型的圖像數(shù)據(jù),均能實(shí)現(xiàn)較高的檢測精度,相較于原始的Yolov5模型具有更好的檢測能力。為了更好地描述Yolov5模型改進(jìn)前后的性能,采用F1值曲線來進(jìn)行對比分析。F1值是一種常用于衡量二分類模型性能的指標(biāo),綜合考慮了精確率和召回率,能夠評估模型的綜合性能。測試結(jié)果如圖5所示。
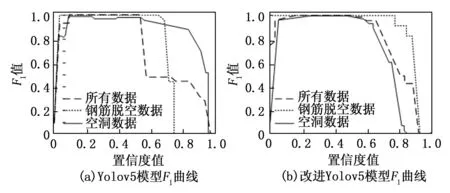
圖5 Yolov5模型改進(jìn)前后的F1曲線
圖5(a)為改進(jìn)前的Yolov5目標(biāo)檢測模型的F1值曲線,圖5(b)為改進(jìn)后的Yolov5目標(biāo)檢測模型的F1值曲線。從圖中可以看出,兩種模型的F1值曲線先增加,到峰值后基本保持不變。隨著置信度值的增加,F(xiàn)1值曲線逐漸減小。例如當(dāng)置信度為0.4時,改進(jìn)前的Yolov5目標(biāo)檢測模型的所有數(shù)據(jù)的F1值為1.0,鋼筋脫空數(shù)據(jù)的F1值為1.0,但是空洞數(shù)據(jù)的F1值為0.95。改進(jìn)后的Yolov5目標(biāo)檢測模型的所有數(shù)據(jù)的F1值為1.0,鋼筋脫空數(shù)據(jù)的F1值為1.0,空洞數(shù)據(jù)的F1值為1.0。在相同的置信度值下,改進(jìn)后的Yolov5模型具有更高的F1值,因此具有更好的檢測性能。
2.2 地鐵隧道目標(biāo)檢測模型實(shí)例分析
為了驗(yàn)證車載探地雷達(dá)技術(shù)在實(shí)際案例中的檢測性能,將SIR-30車載探地雷達(dá)系統(tǒng)沿著某市1號線地鐵隧道進(jìn)行檢測,車載探地雷達(dá)系統(tǒng)天線頻率設(shè)置為300 MHz,為空氣耦合天線。檢測通道設(shè)置為6個,每個通道都是獨(dú)立的,采樣頻率設(shè)置為500 kHz,掃描頻率設(shè)置為976 scan/s,采樣點(diǎn)數(shù)為512個,每個的采樣時間為60 ns,間距16 mm采樣一次。雷達(dá)系統(tǒng)前進(jìn)速度為60 km/h,電源為220 V的交流電源。收集7種樣本數(shù)據(jù),樣本數(shù)據(jù)的類別分別為雨水井、電纜、金屬導(dǎo)管、非金屬管、稀疏鋼筋網(wǎng)、密集鋼筋網(wǎng)以及空洞,合計3 000條數(shù)據(jù)。采用零時校正、去直流、背景去除和圖像增益方法對信號和圖像進(jìn)行去噪處理。將車載探地雷達(dá)系統(tǒng)在上述7種類別的樣本中進(jìn)行測試,采用召回率、精確度值和F1值作為測試指標(biāo),結(jié)果如表1所示。

表1 不同種類樣本的檢測結(jié)果
從表1中可以看出,車載探地雷達(dá)系統(tǒng)檢測稀疏鋼筋網(wǎng)時的F1值最高,為0.908,檢測空洞時的F1值最低,為0.821。車載探地雷達(dá)系統(tǒng)檢測金屬導(dǎo)管時的精確度值最高,為0.915,檢測空洞時的精確度值最低,為0.819。車載探地雷達(dá)系統(tǒng)檢測致密鋼筋網(wǎng)時的召回率最高,為0.968,空洞時的精確度值最低,為0.819。雖然檢測不同缺陷時有不同的指標(biāo)結(jié)果,但是檢測7種類別的樣本F1值平均值為0.884,精確度值的平均值為0.873,召回率的平均值為0.895,3種指標(biāo)的數(shù)值均在0.850以上。因此,此次研究引入SPP-Bottleneck神經(jīng)網(wǎng)絡(luò)模塊改進(jìn)后的車載探地雷達(dá)系統(tǒng),對于地鐵隧道中的不同缺陷的檢測均具有有效性。為了驗(yàn)證Yolov5目標(biāo)檢測模型在車載探地雷達(dá)系統(tǒng)中的實(shí)際應(yīng)用效果,選擇3種常見的目標(biāo)檢測模型進(jìn)行對比測試,分別為模板匹配模型、基于梯度直方圖的支持向量機(jī)模型(HOG-SVM,histogram of gradient-support vector mac)、基于區(qū)域卷積神經(jīng)網(wǎng)絡(luò)的目標(biāo)檢測模型(Faster RCNNC,faster regions with CNN features),將P-R曲線和測試時間作為指標(biāo),對比測試的結(jié)果如圖6所示。
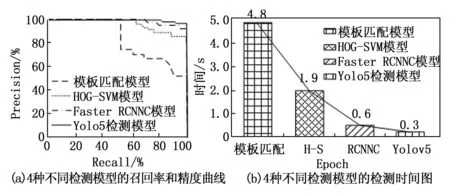
圖6 4種不同檢測模型的P-R曲線和時間柱狀圖
從圖6(a)中可以看出,模板匹配模型的P-R曲線與坐標(biāo)軸圍成的面積最小,檢測的性能最差。Yolov5目標(biāo)檢測模型的P-R曲線與坐標(biāo)軸圍成的面積最大,檢測的性能最優(yōu)。從圖6(b)中可以看出,模板匹配目標(biāo)檢測模型測試時間為4.8 s,HOG-SVM目標(biāo)檢測模型的檢測時間為1.9 s,F(xiàn)aster RCNNC目標(biāo)檢測模型的檢測時間為0.6 s,Yolov5目標(biāo)檢測模型的檢測時間為0.3 s。由此可見,Yolov5目標(biāo)檢測模型的檢測時間相較于模板匹配目標(biāo)檢測模型、HOG-SVM目標(biāo)檢測模型和Faster RCNNC目標(biāo)檢測模型,檢測效率分別提升了93.75%、84.2%和50.0%。因此,在改進(jìn)后的Yolov5目標(biāo)檢測模型中,引入的SPP-Bottleneck神經(jīng)網(wǎng)絡(luò)模塊和特征金字塔能夠增強(qiáng)模型對不同種類圖像的檢測效率,錨框的生成能提高檢測的準(zhǔn)確性和魯棒性。與其他3種模型相比,Yolov5目標(biāo)檢測模型在實(shí)際的應(yīng)用中具有更好的檢測效果和檢測效率,使用價值高于其他3種檢測模型。
3 結(jié)束語
地鐵隧道對于地鐵的運(yùn)營和安全至關(guān)重要,因此對于地鐵隧道的檢測和維護(hù)是一項(xiàng)關(guān)鍵的任務(wù)。為了更好地對地鐵隧道的缺陷進(jìn)行檢測,此次研究基于車載探地雷達(dá)檢測系統(tǒng),對雷達(dá)系統(tǒng)中的信號和成像圖像中,存在的噪聲采用不同的去噪方式進(jìn)行處理。采用Yolov5目標(biāo)檢測模型,并引入SPP-Bottleneck模塊對Yolov5目標(biāo)檢測模型進(jìn)行改進(jìn),構(gòu)建基于Yolov5模型的車載探地雷達(dá)檢測系統(tǒng)。測試結(jié)果顯示,改進(jìn)后的Yolov5模型與原始的Yolov5模型相比,改進(jìn)后的Yolov5模型具有更好的P-R值,并且在相同的置信度值下,改進(jìn)后的Yolov5模型具有更高的F1值。因此,改進(jìn)后的Yolov5目標(biāo)檢測模型具有更好的檢測性能。在實(shí)際的工程應(yīng)用中,基于Yolov5檢測模型的車載探地雷達(dá)檢測系統(tǒng)的F1值平均值為0.884,精確度值的平均值為0.873,召回率的平均值為0.895,均在0.850以上,因此該模型對于隧道中的缺陷檢測具有有效性。與其他3種目標(biāo)檢測模型相比,Yolov5目標(biāo)檢測模型的P-R曲線與坐標(biāo)軸圍成的面積最大,檢測的性能最優(yōu)。Yolov5目標(biāo)檢測模型的檢測時間為0.3 s,相較于模板匹配模型、HOG-SVM模型和Faster RCNNC模型,效率分別提升了93.75%、84.2%和50.0%,更具有實(shí)際應(yīng)用價值。此次研究也存在不足之處,模型檢測的數(shù)據(jù)集不夠全面,在接下來的研究中應(yīng)考慮到隧道內(nèi)部結(jié)構(gòu)數(shù)據(jù),構(gòu)建更全面的數(shù)據(jù)集用來輔助檢測。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
