耳道全自動三維重建技術研究
2024-05-07 02:48:44梁毅途
中國新技術新產(chǎn)品 2024年6期
關鍵詞:模型
梁毅途 徐 立, 徐 剛
(1.天鍵醫(yī)療科技(廣東)有限公司,廣東 中山 528400;2.中山市武漢大學技術轉移中心,廣東 中山 528400)
目前,我國工業(yè)體系已逐漸完善,類別齊全,系統(tǒng)完備。與此同時,隨著計算機技術快速進步,三維數(shù)字化技術也快速發(fā)展,但是在工業(yè)制造、醫(yī)療和文物保護等領域中,該技術還存在很多問題,例如在工業(yè)生產(chǎn)制造過程中,零部件品種繁多,結構復雜,這些復雜、不規(guī)則形體的三維重建需要耗費巨大的時間和人力,但是效率很低,因此有必要研究制定一套快速、全自動化三維建模方案。在這些場景中,復雜、不規(guī)則形體三維重建的關鍵技術是精細、完整地獲取三維準結構數(shù)據(jù)。本文以人耳為例探討了復雜結構的三維建模問題。人耳形態(tài)各異且耳道無法直接觀察,因此,對耳朵這種不規(guī)則形體的建模來說,精準構建耳朵三維模型具有重要的理論意義和實際價值。
1 方案總體設計
1.1 總體方案
針對人耳的三維模型重建問題,本文提出軟硬件結合的不規(guī)則形體全自動三維掃描重建方案。本文設計了一套硬件系統(tǒng),包括空間位置傳感器、計算機、機械臂、掃描儀、控制器、顯示器、電源和底座,通過獲取人耳三維點云數(shù)據(jù),進行快速、全自動的耳道建模。在軟件部分,通過獲取各掃描路徑的點云數(shù)據(jù),進行一系列配準處理,例如噪聲濾波、點云簡化和點云三維重構等,重構耳朵的數(shù)據(jù)模型。在此基礎上,通過耳道數(shù)據(jù)庫和特征庫,對采集的耳道數(shù)據(jù)進行匹配算法,找到最佳的耳道模型,完成耳廓三維重建。
1.2 硬件系統(tǒng)構成以及選型
本研究基于硬件系統(tǒng)三維掃描人耳,獲得數(shù)據(jù),快速、全自動采集三維點云數(shù)據(jù)。掃描儀獲取的線輪廓二維數(shù)據(jù)經(jīng)過六自由度機械臂處理后拓展成空間的三維數(shù)據(jù)。硬件系統(tǒng)由空間位置傳感器、計算機、機械臂、掃描儀、控制器、顯示器、電源和基座組成。“掃描儀+機械臂+空間位置傳感器”構成數(shù)據(jù)采集的核心;“計算機”控制機械臂運動,采集并處理掃描儀的數(shù)據(jù);“基座+固定裝置”保證當處于不同機械臂姿態(tài)時,硬件系統(tǒng)掃描的平穩(wěn)性和可靠性。硬件系統(tǒng)各部分如圖1所示。
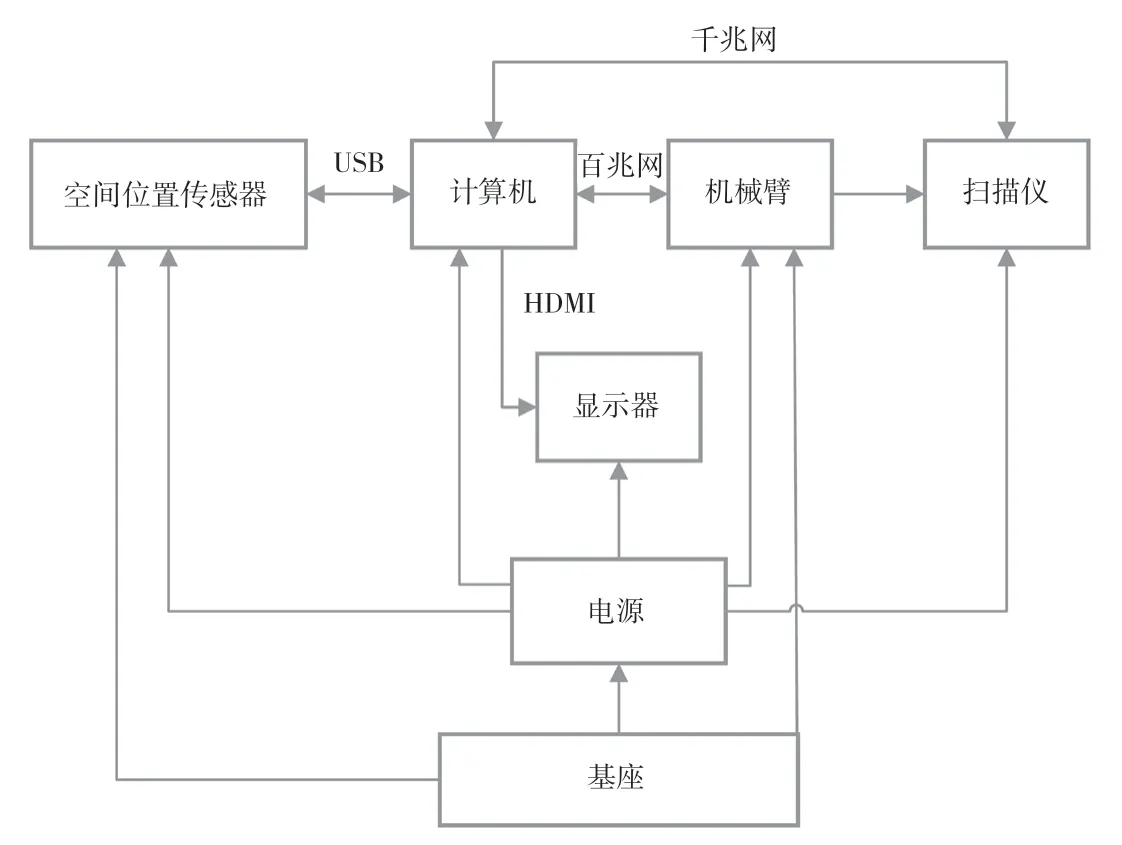
圖1 硬件系統(tǒng)各部分示意圖
1.2.1 六自由度機械臂
本研究使用的機械臂是國產(chǎn)六自由度機械臂安諾5(AR5)。機械臂由機器人本體、控制箱和示教器3個部分組成,如圖2所示。調(diào)整控制機械臂姿態(tài),一方面利用控制箱的網(wǎng)線與計算機建立連接,計算機發(fā)送控制指令給控制箱,控制箱執(zhí)行指令來控制機械臂;另一方面可以使用示教盒編程直接控制機器人本體。

圖2 六自由度機械臂
本研究選取的線激光輪廓掃描儀是深視智能線激光掃描儀SR6260。掃描儀傳感頭由激光發(fā)射LED單元、傳感頭激光發(fā)射窗口、傳感頭感光窗口和高柔性連接線等組成,并搭配控制器SR7001和供電直流電源采集被測物體輪廓信息。
1.2.2 空間位置傳感器
當多姿態(tài)掃描人耳時,要求人耳空間位置不變,此時得到的掃描數(shù)據(jù)是真實有效的。因此,當掃描時,為保證人耳空間位置相對不變,須在硬件平臺中采用1套固定裝置。為判別人耳固定狀態(tài)下掃描效果的優(yōu)劣,采用空間位置傳感器來記錄人頭的晃動量,判斷單次人耳掃描姿態(tài),剔除不穩(wěn)定掃描結果,并修正穩(wěn)定掃描結果。
1.2.3 其他硬件模塊
為實現(xiàn)空間位置傳感器、機械臂和掃描儀與計算機、供電設備和控制設備之間的相對固定配合,采用艾頓(iOptron)重型立柱三腳架作為基座,用于支撐和固定各硬件模塊。在掃描過程中,當掃描真人人耳時,為了減少人體晃動造成人耳偏移的情況,降低因晃動帶來的誤差,使用側立板、小平板和左右支撐板等零部件固定人體頭部,這些零部件可縮進頭盔,組成1套人體頭部固定裝置。
2 系統(tǒng)軟件設計
本文的軟件系統(tǒng)主要包括點云數(shù)據(jù)采集模組、空間位置傳感器定位模組和點云數(shù)據(jù)處理模組3個模組。采集模組通過硬件平臺和線激光輪廓掃描儀獲取二維激光輪廓信息,結合機械臂參數(shù)計算得到三維耳廓數(shù)據(jù)。定位模組利用空間位置傳感器實時追蹤頭部固定模塊的靶標,通過數(shù)字圖像處理進行靶標跟蹤。處理模組則通過點云配準、點云提取、點云去噪、點云精簡、第二道建模和三維建模來處理不同姿態(tài)下的三維點云數(shù)據(jù)[1],系統(tǒng)軟件流程如圖3所示。
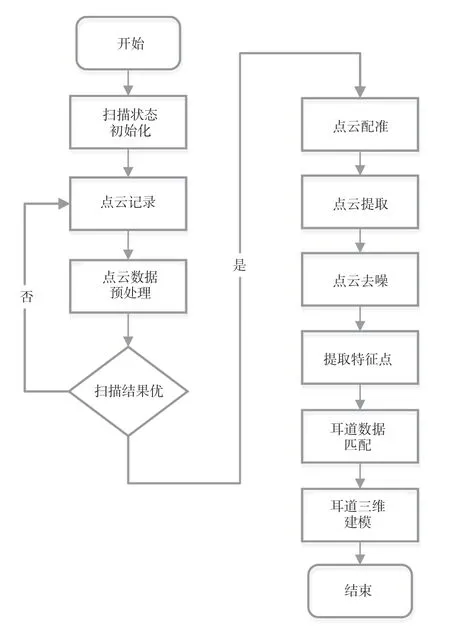
圖3 系統(tǒng)軟件流程
在掃描前需要設定掃描參數(shù),可以選擇左耳掃描、右耳掃描和雙耳掃描3種掃描姿態(tài),搭載空間位置傳感器,實時記錄在掃描過程中的晃動量,同時顯示相機的幀率、分辨率等信息。處理模組解算二維線輪部掃描儀的三維數(shù)據(jù)并得到耳朵數(shù)據(jù)處理軟件所需的二進制文件。在解算完成后,根據(jù)空間位置傳感器記錄的晃動信息得到各掃描姿態(tài)的掃描穩(wěn)定性,如果某姿態(tài)的掃描穩(wěn)定性很差(穩(wěn)定性很好:σ<0.05 mm;穩(wěn)定性很差:σ>0.10 mm),則該次掃描數(shù)據(jù)不可信,須重新掃描。
為了高效、全自動獲取三維耳廓信息,需要設定掃描儀的姿態(tài)和運行速度,并采用多方向、多角度的掃描策略以完成三維數(shù)據(jù)覆蓋。設掃描速度為15 mm/s,決定相鄰輪廓線間距,并與二維激光線輪廓掃描儀的X軸分辨率相適應。當實際運行時,要保證掃描儀平穩(wěn)且盡量縮短運動時間。選擇盡可能少但是覆蓋范圍廣的掃描方向,為獲取雙耳模型,左、右耳分別設計7個掃描方向。以單耳(左耳)掃描姿態(tài)為例,具體掃描方向說明見表1。
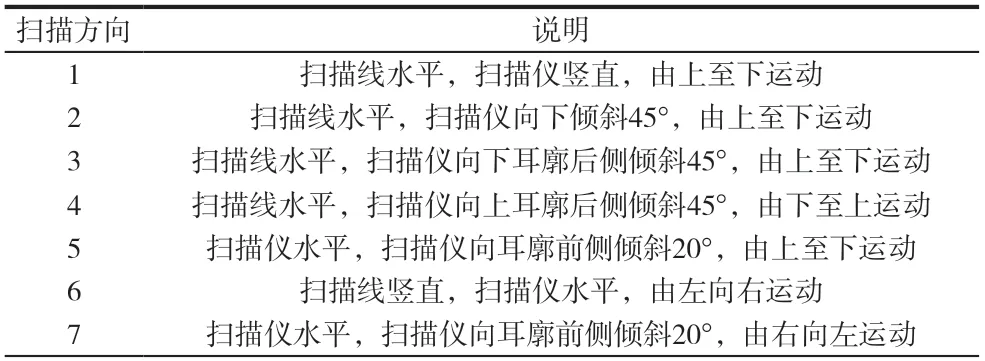
表1 掃描方向說明
在得到粗篩的耳朵模型后,下一步需要從中選擇1個三維耳朵模型作為掃描的人耳耳道數(shù)據(jù)的補充,這里用的是迭代最近點算法——ICP配準的精確配準方法。
采用本方案掃描得到的耳朵點云集設為P={p1,p2,...pm},由初篩得到的耳朵模型點云集設為Q={q1,q2,...qm},其中m、n為點云集中點的數(shù)量。精配準須尋找1組R、T,使P中的每個點經(jīng)過變換后與Q中的最近點的誤差之和最小,即最小化該目標函數(shù),如公式(1)所示。
式中:f(R,T)為點云集合經(jīng)過旋轉和平移之后的最小平方和;N為點云集合中點的數(shù)量;qi為數(shù)據(jù)點的旋轉角;T為平移向量;R為最優(yōu)旋轉角;Rpi為原始點云的質(zhì)心旋轉角。
設最大迭代次數(shù)為kmax,單次迭代的均方誤差閾值為ξ,2次迭代的均方誤差之間的差值上限為ε。此時相似度最高,與耳朵建模效果最佳。
3 耳朵三維建模
在不同方向上得到耳道數(shù)據(jù)后,融合數(shù)據(jù),就可以得到包括耳道信息的三維數(shù)據(jù),進行數(shù)據(jù)建模。本文采用目前點云重建效果比較好的泊松曲面重建算法,流程如圖4所示。
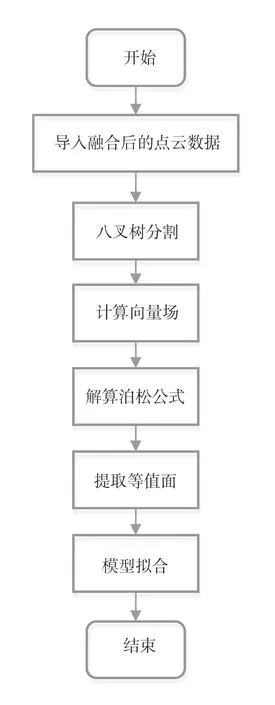
圖4 泊松曲面重建算法流程
點云數(shù)據(jù)通過泊松曲面算法進行曲面重構,設內(nèi)部指示函數(shù)的梯度為1,設外部指示函數(shù)的梯度為0,從而替代輸入的源點云數(shù)據(jù),完成曲面模型構建[1]。
3.1 八叉樹分割點云
重建泊松曲面的第一步是對融合后的點云構建空間三維關系。節(jié)點函數(shù)F0為記錄點云數(shù)據(jù)的八叉樹的每個節(jié)點,如公式(2)所示。
式中:b為八叉樹節(jié)點的中心;q為目標點云;w為節(jié)點寬度;F為基函數(shù)。F0滿足以下2個條件。1)對F0線性求和可以準確表達向量場V。2)F0代表的泊松方程應當有解。
3.2 計算向量場
描述F0與向量場V的對應關系,設D為八叉樹深度,如公式(3)所示。
式中:F(q)為八叉樹分割點云節(jié)點函數(shù)。
3.3 解算泊松方程
將曲面重建轉化為求解高維泊松方程,如公式(4)所示。
式中:c為八叉樹節(jié)點中心;B(x)為點云在x方向的均方差(距離系數(shù))函數(shù);B(y)為點云在y方向的均方差(距離系數(shù))函數(shù);B(z)為點云在z方向的均方差(距離系數(shù))函數(shù);F(x,y,z)為三維節(jié)點函數(shù)。*n為n個一樣的函數(shù)連續(xù)卷積操作;B(s)為均方差(距離系數(shù))函數(shù),x、y、z分別為該軸方向矩陣上的點云數(shù)據(jù),如公式(5)所示。
將當前臨近的8個節(jié)點以線性插值的方式分配,N(t)為當前節(jié)點p的8個臨近節(jié)點,根據(jù)指示函數(shù)中表面梯度函數(shù)向量場進行模型的表面估計,如公式(6)所示。
式中:(q)為表面梯度函數(shù)向量場模型的表面;λ為節(jié)點函數(shù)的權重;t為點云數(shù)據(jù)某點的K領域;FO(q)為點云的旋轉曲度;為該節(jié)點頂點的法向量。于是問題轉為求解最小函數(shù)x,如公式(7)所示。
式中:為向量場V的微分算子。
利用在函數(shù)所在空間的拉普拉斯算子投影與F0組成的向量|?|,向維向量v逼近,求解函數(shù)x,如公式(8)所示。
矩陣L的特點是兼具稀疏與對稱性,求解該矩陣可以利用多重網(wǎng)格法。
3.4 求取等值面
求取等值面是整個泊松重建的最后一步,目的是重建模型表面,為了獲取點云的待建曲面,先選定一個針對求取等值面的最優(yōu)閾值,完成三角面片拼接,重建表面模型[2]。
掃描前,可以選擇左耳掃描、右耳掃描和雙耳掃描3種掃描方式,掃描儀在運動過程中計算晃動量,實時顯示相機的分辨率信息。進入數(shù)據(jù)處理階段后,會融合計算各方向的數(shù)據(jù),得到耳朵數(shù)據(jù)處理軟件需要的二進制文件。對耳朵數(shù)據(jù)進行提取、去噪和簡化等預處理,得到三維模型[2],如圖5所示。
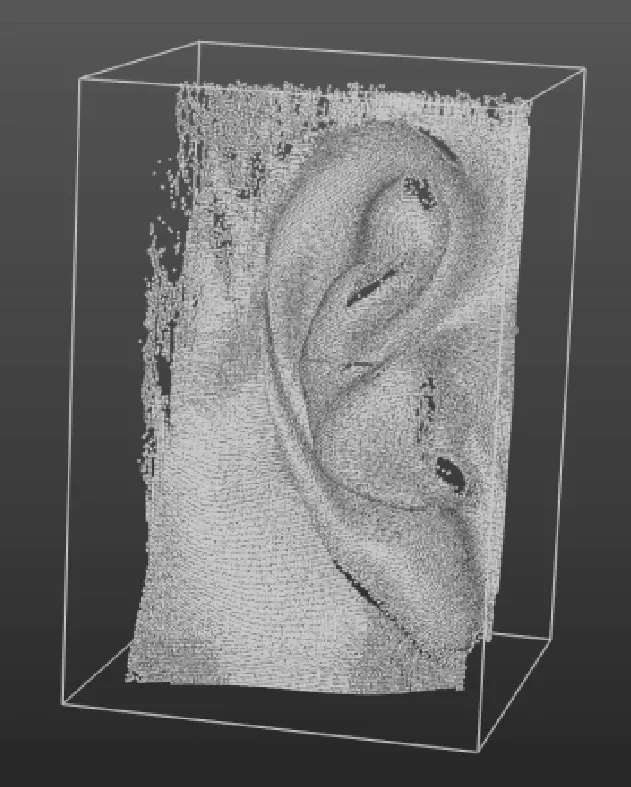
圖5 耳朵三維模型
4 模型匹配與建模
模型匹配分為粗匹配和精匹配。通過計算特征點構成的特征矩陣間的漢明距離,粗匹配得到一系列粗篩的耳朵模型,但是具體應當選擇哪一個作為最終掃描人耳的耳道數(shù)據(jù)補充是未定的。精匹配是在粗匹配劃定的粗篩模型中進行ICP配準,得到相似度最高的10個耳朵模型,用相似度最高的耳朵模型來擬合掃描點云的耳道數(shù)據(jù),如圖6所示。
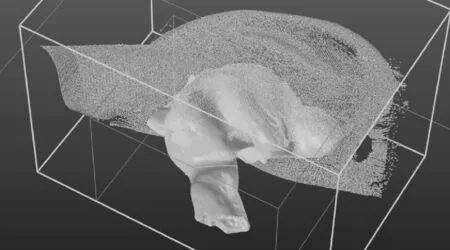
圖6 模型擬合
利用本研究硬件系統(tǒng)和耳朵數(shù)據(jù)獲取軟件得到外耳廓三維點云數(shù)據(jù)。通過建立耳朵數(shù)據(jù)庫以及耳模匹配,補充外耳廓點云數(shù)據(jù),得到完整的右耳泊松重建改進參數(shù),重建效果如圖7所示。
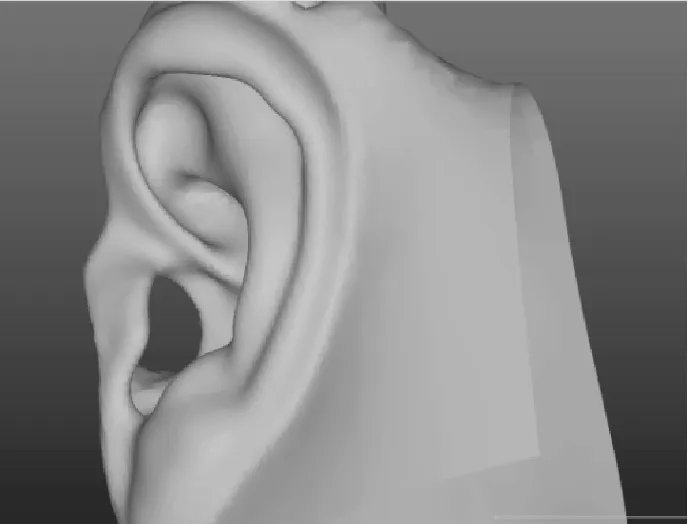
圖7 右耳泊松重建改進參數(shù)重建效果
5 結論
復雜形體能夠利用全自動耳道三維重建技術進行三維建模,該技術究價值很高,應用前景廣闊。本研究通過硬件系統(tǒng)和軟件系統(tǒng)的配合,得到了人耳的精確三維模型。研究結果表明,該技術在精確度和自動化程度上都表現(xiàn)出較高水平,實用價值高。未來研究可以利用優(yōu)化算法提高重建精度,擴大應用領域,為醫(yī)療、制造等領域提供更強大的技術支持。該技術在定制助聽器和診斷耳朵疾病等醫(yī)療領域的應用,以及結合現(xiàn)有三維打印技術,為患者提供個性化治療方案等方面也具有巨大的潛力。
本研究結合硬件系統(tǒng)和軟件系統(tǒng),構建了全自動耳道三維重建技術。研究結果表明,該技術在精確度和自動化程度上都表現(xiàn)出較高水平。未來研究可以從以下4個方面進行優(yōu)化。1)算法優(yōu)化。進一步優(yōu)化現(xiàn)有算法,提高重建精度和速度,為人耳和其他復雜形體的三維建模提供更強大的技術支持。2)應用領域擴大。將該技術應用于更多領域,例如醫(yī)療、制造和藝術等,為相關行業(yè)提供高效的三維建模解決方案。3)個性化治療方案。結合現(xiàn)有三維打印技術,為患者提供個性化治療方案,例如定制助聽器和診斷耳朵疾病等。4)疾病診斷與預防。大量分析耳道三維模型的數(shù)據(jù)有助于發(fā)現(xiàn)耳道形狀與疾病之間的關聯(lián),為疾病診斷和預防提供新思路。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19