車載升降式光電云臺共振抑制方法研究
2024-04-29 03:21:50李紹軍李英杰王國右荊凡勝
紅外技術(shù) 2024年4期
李紹軍,李英杰,李 威,徐 哲,王國右,徐 妍,荊凡勝
車載升降式光電云臺共振抑制方法研究
李紹軍,李英杰,李 威,徐 哲,王國右,徐 妍,荊凡勝
(北方信息控制研究院集團(tuán)有限公司,江蘇 南京 210000)
為避免視場遮擋,光電云臺通常置于升降式桅桿頂端,桅桿的結(jié)構(gòu)剛度將直接影響云臺伺服系統(tǒng)的剛度,繼而影響云臺動態(tài)性能。實(shí)際使用時發(fā)現(xiàn),由于桅桿剛度不足導(dǎo)致云臺在方位向轉(zhuǎn)動過程中極易發(fā)生共振,引起云臺工作不穩(wěn)定。針對該問題文中先后引入巴特沃斯低通濾波器、陷波濾波器和線性自抗擾控制方式對升降式光電云臺共振現(xiàn)象進(jìn)行抑制,通過對比三種方式的優(yōu)缺點(diǎn)發(fā)現(xiàn)采用線性自抗擾控制方式具有響應(yīng)速度快、共振抑制效果好、魯棒性好的優(yōu)點(diǎn),適宜應(yīng)用于升降式光電云臺控制系統(tǒng)。
光電云臺;升降式桅桿;巴特沃斯濾波器;陷波濾波器;線性自抗擾控制
0 引言
偵察車輛通常裝備有集成高清CCD攝像機(jī)、紅外熱像儀的光電云臺,以便于晝夜實(shí)時獲取偵察車輛周邊態(tài)勢。為了減少觀察盲區(qū),獲取更遠(yuǎn)范圍的視場,通常將光電云臺置于升降式桅桿頂端。受限于重量、成本和技術(shù)限制,升降式桅桿一般都為空心結(jié)構(gòu),這導(dǎo)致桅桿結(jié)構(gòu)剛度明顯低于車輛安裝基面。光電云臺安裝于桅桿頂端后,云臺方位向的加減速切換以及不同的速度控制方式易使桅桿產(chǎn)生撓曲變形[1],載體車輛發(fā)動機(jī)的振動也會傳遞到桅桿上,這將加劇桅桿振動,導(dǎo)致光電云臺視場模糊,嚴(yán)重時甚至導(dǎo)致光電云臺轉(zhuǎn)動異常。
通過對光電云臺共振原因進(jìn)行分析,結(jié)合觀測到的光電云臺共振時的速度時域波形,對升降式光電云臺的共振現(xiàn)象有了進(jìn)一步認(rèn)識。為了解決這一問題,文中分別采用了速度環(huán)添加巴特沃斯低通濾波器、速度環(huán)添加陷波濾波器、速度環(huán)采用自抗擾控制方式來抑制共振。實(shí)驗(yàn)結(jié)果表明采用自抗擾控制方式可以實(shí)現(xiàn)在無需降低光電云臺動態(tài)性能的前提下,仍能具有良好的共振抑制效果。
1 共振原理分析
光電云臺安裝于倒伏升降式桅桿頂部,倒伏升降式桅桿基座安裝于車輛載體表面,系統(tǒng)安裝連接關(guān)系示意圖如圖1所示。

圖1 系統(tǒng)安裝連接關(guān)系示意圖
云臺方位電機(jī)采用了正弦波永磁同步電機(jī),由于云臺重心與桅桿軸向不一定完全重合以及桅桿自身結(jié)構(gòu)剛度不足,當(dāng)云臺方位向轉(zhuǎn)動時,桅桿會不可避免地產(chǎn)生柔性形變,此時可將桅桿和光電云臺統(tǒng)一視為一個二質(zhì)量柔性伺服系統(tǒng)進(jìn)行分析[2],該簡化模型如圖2所示。
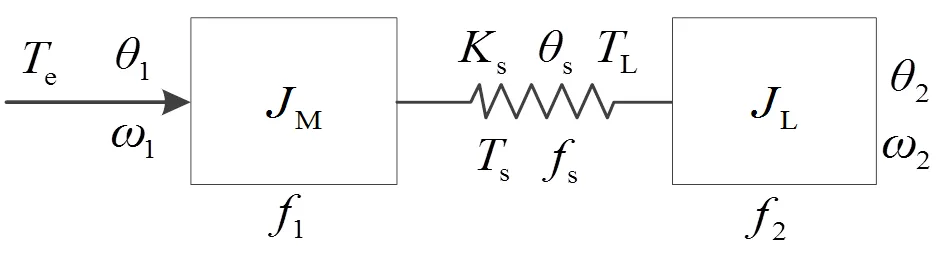
圖2 二質(zhì)量柔性伺服系統(tǒng)等效示意圖
電機(jī)和負(fù)載側(cè)動力學(xué)方程:
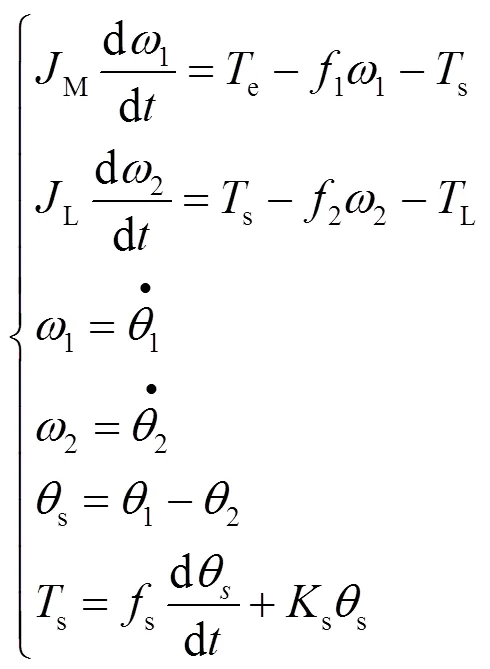
式中:e為電機(jī)輸出轉(zhuǎn)矩;s為連接軸轉(zhuǎn)矩;L為負(fù)載擾動轉(zhuǎn)矩;M為電機(jī)慣量;L為負(fù)載慣量;1為電機(jī)轉(zhuǎn)角;s為連接軸轉(zhuǎn)角;2為負(fù)載轉(zhuǎn)角;1為電機(jī)轉(zhuǎn)速;2為負(fù)載轉(zhuǎn)速;1為電機(jī)阻尼系數(shù);s為連接軸阻尼系數(shù);2為負(fù)載阻尼系數(shù);s為連接軸剛度系數(shù)。
忽略電機(jī)、負(fù)載的阻尼系數(shù)以及負(fù)載的擾動轉(zhuǎn)矩影響,由式(1)可得到負(fù)載轉(zhuǎn)速和電機(jī)轉(zhuǎn)矩的傳遞函數(shù)為:

2 共振抑制方式介紹
2.1 速度環(huán)添加巴特沃斯濾波器
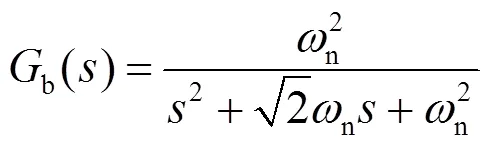
巴特沃斯濾波器在相同階數(shù)的濾波器中,具有最大斜率的衰減,且在波特圖幅頻特性中不產(chǎn)生凸峰,因此在控制系統(tǒng)中被經(jīng)常采用[4]。文中采用阻尼比為0.707的二階巴特沃斯低通濾波器為:
將巴特沃斯濾波器添加到速度環(huán)中,用于對采用M法(即通過在固定時間間隔獲得的轉(zhuǎn)角差值求商)取得的電機(jī)轉(zhuǎn)速進(jìn)行濾波,如圖3所示。
圖3 巴特沃斯濾波器使用原理
Fig.3 Butterworth filter usage principle
2.2 速度環(huán)添加陷波濾波器
陷波濾波器是一種帶阻濾波器,它可將陷波中心頻率附近的頻率點(diǎn)的輸入幅值衰減到對系統(tǒng)的影響最小,而對陷波頻帶以外的頻率信號基本沒有影響[5]。因此是一種得到廣泛應(yīng)用的機(jī)械共振抑制方法。一種常用的陷波濾波器傳遞函數(shù)表達(dá)式為:
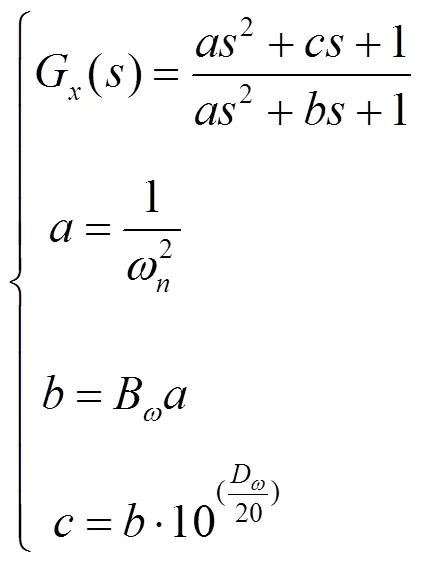
式中:n為陷波頻率;為陷波濾波器的陷波帶寬;為陷波濾波器的陷波深度。
n的值應(yīng)根據(jù)系統(tǒng)共振頻率進(jìn)行調(diào)整,以使得陷波濾波器可以將共振頻率抑制住;通過調(diào)整陷波帶寬值和陷波濾波器深度可以影響陷波濾波器作用頻帶寬窄和幅頻特性下陷深度深淺;應(yīng)合理設(shè)置這3個值,使陷波濾波器既能有效抑制共振頻率又能對其他頻率不產(chǎn)生影響[6]。
將陷波濾波器串入速度環(huán)輸出環(huán)節(jié)如圖4所示,以整定速度環(huán)輸出即電流環(huán)的給定輸入,實(shí)現(xiàn)抑制光電云臺機(jī)械共振的目的。
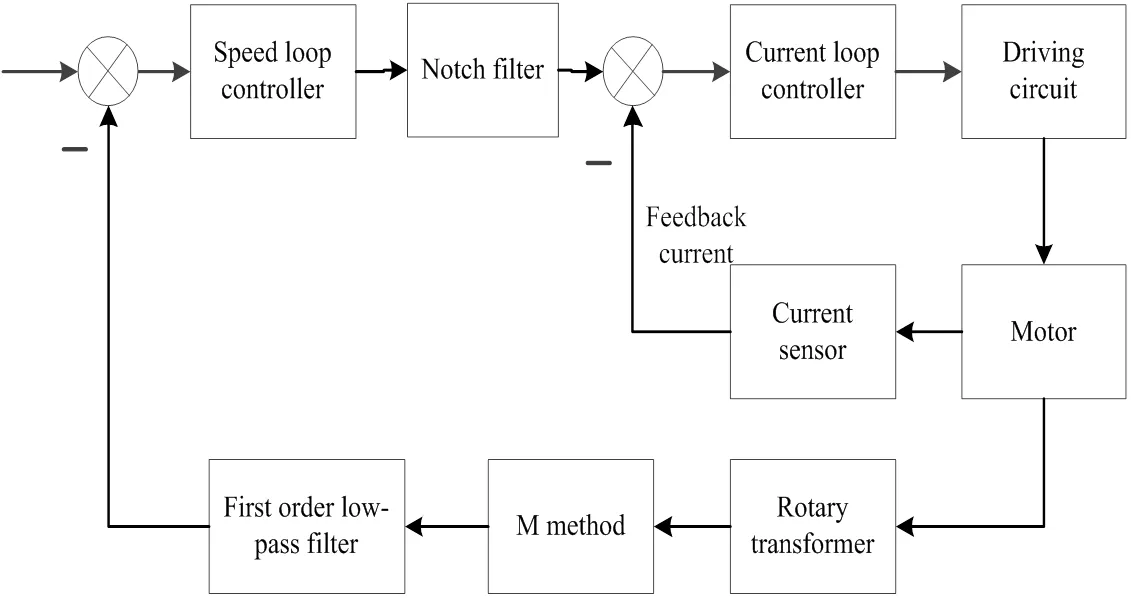
圖4 陷波濾波器使用原理
2.3 速度環(huán)添加自抗擾控制
將速度環(huán)控制律由比例積分(proportional integral, PI)控制器方式改為線性自抗擾控制方式(linear active disturbance rejection control, LADRC),光電云臺控制原理如圖5所示。
LADRC的優(yōu)勢在于它將系統(tǒng)內(nèi)外部的各種擾動和未知量統(tǒng)一視為一個總擾動,通過一個線性擴(kuò)張狀態(tài)觀測器去估計該總擾動,并通過控制律實(shí)時進(jìn)行補(bǔ)償[7-8]。而升降式光電云臺的共振擾動可視為一個未知的擾動量,可通過LADRC方式對其進(jìn)行抑制。
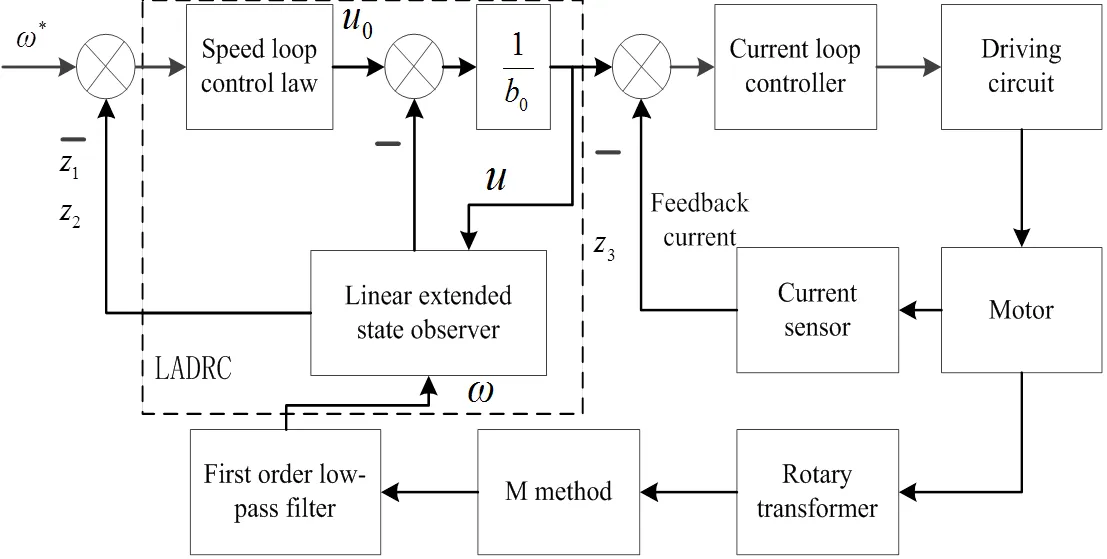
圖5 速度環(huán)采用LADRC方式原理
式(2)可改寫為:
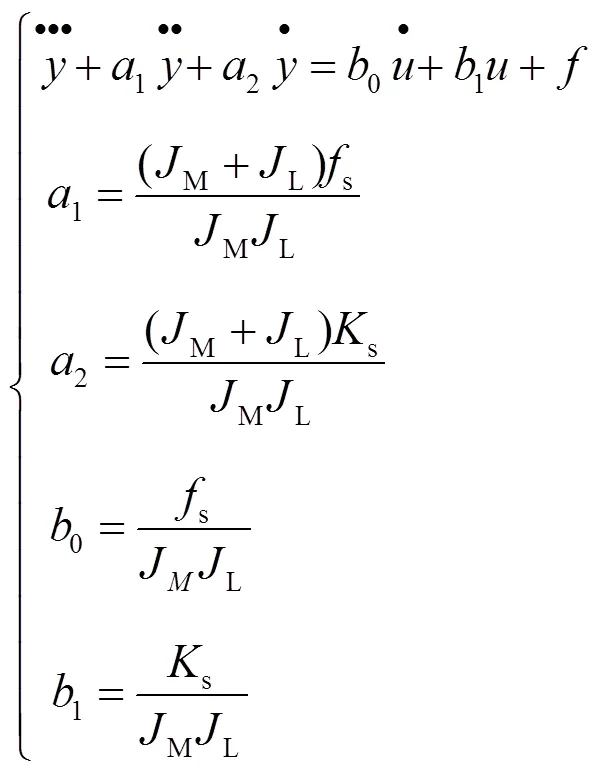
式中:為電機(jī)轉(zhuǎn)速2;為電機(jī)轉(zhuǎn)矩e;系統(tǒng)為外部擾動量。
式(5)可進(jìn)一步改寫為:
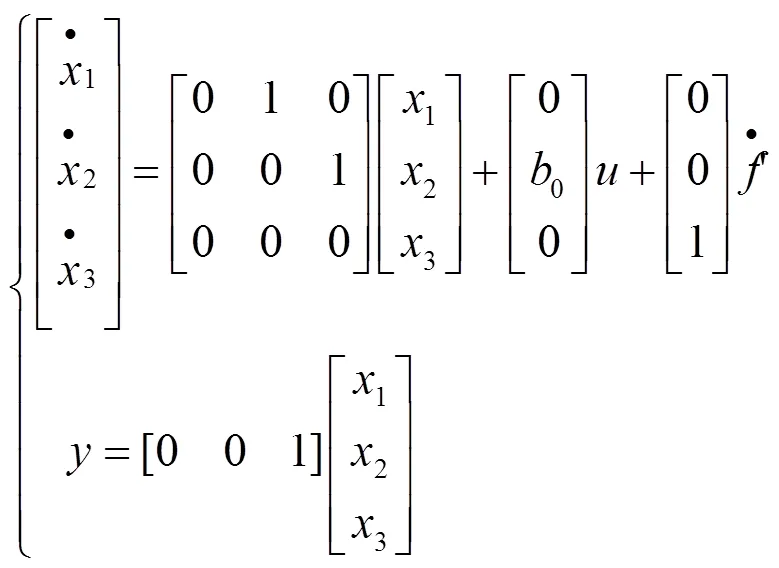
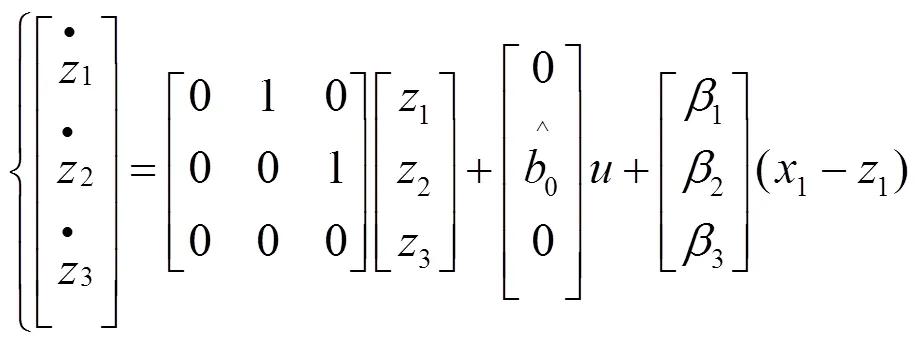
對應(yīng)可建立系統(tǒng)的擴(kuò)張狀態(tài)觀測器為:

控制律采用的比例微分控制器為:

3 測試結(jié)果
光電云臺方位向采用J110LWX004型無刷力矩電機(jī)和J90XFS001型雙通道旋轉(zhuǎn)變壓器,采用的電機(jī)和旋轉(zhuǎn)變壓器參數(shù)見表1。

表1 電機(jī)和旋轉(zhuǎn)變壓器參數(shù)
速度環(huán)給定轉(zhuǎn)速*=5°/s,測試速度環(huán)采用PI控制器和負(fù)載速度反饋采用250Hz一階低通濾波器時處于升起狀態(tài)下光電云臺方位向速度響應(yīng)情況,速度環(huán)響應(yīng)曲線如圖6所示。
可見轉(zhuǎn)速達(dá)到5°/s后,云臺迅速進(jìn)入了共振狀態(tài),已經(jīng)無法正常工作。
速度環(huán)仍采用PI控制器,負(fù)載速度反饋采用二階250Hz巴特沃斯濾波器后,處于升起狀態(tài)下光電云臺方位向速度響應(yīng)曲線如圖7所示。
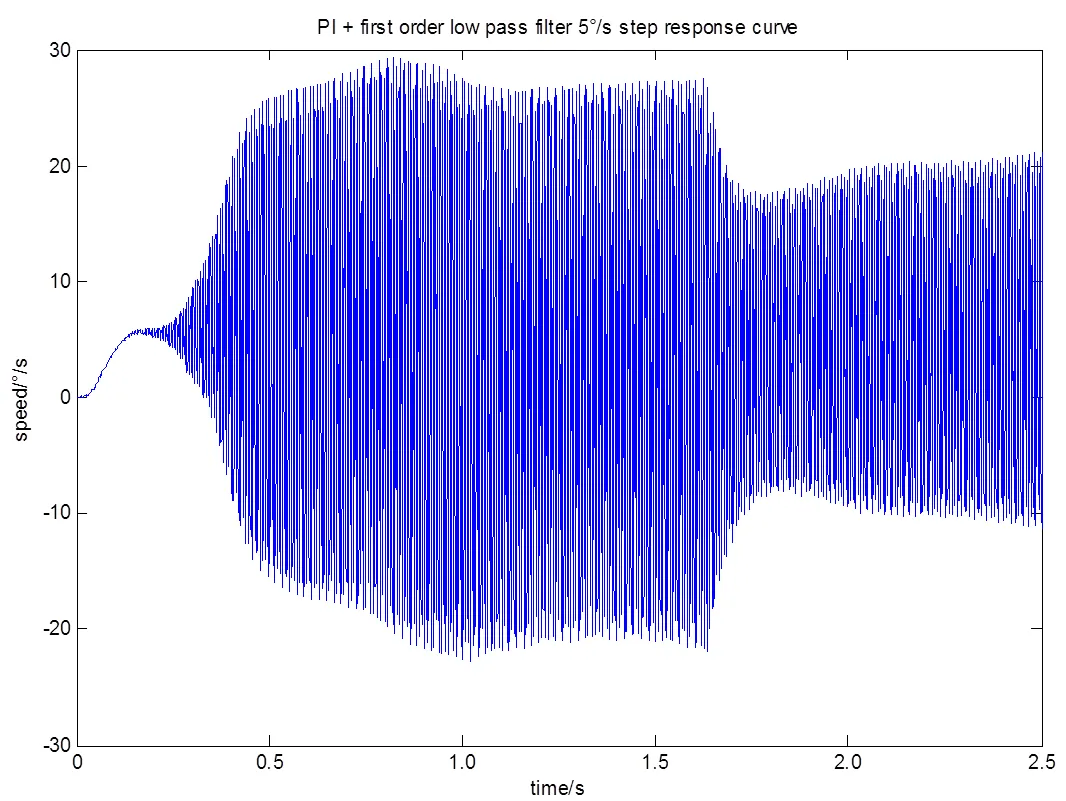
圖6 PI+一階250Hz低通濾波器速度響應(yīng)曲線
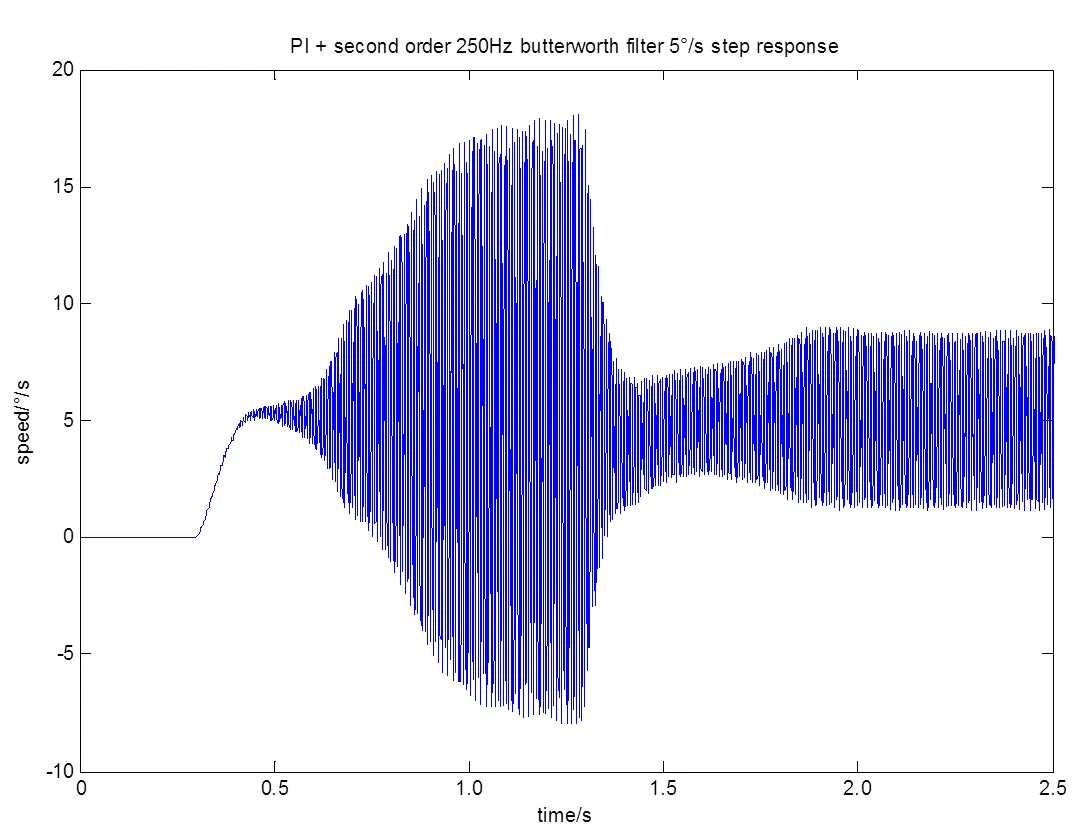
圖7 PI+二階250Hz巴特沃斯濾波器速度響應(yīng)曲線
可見云臺方位速度環(huán)共振現(xiàn)象有所減弱,但云臺仍處于共振狀態(tài)不能正常工作。
將巴特沃斯濾波器截止頻率設(shè)為60Hz后,分別測試云臺給定速度為0.5°/s、5°/s、30°/s時云臺方位向速度響應(yīng)曲線,如圖8所示。0.5°/s子圖中小圖為穩(wěn)態(tài)誤差段局部放大圖。5°/s、30°/s子圖中左側(cè)小圖為上升時間段局部放大圖,右側(cè)小圖為穩(wěn)態(tài)誤差段局部放大圖。
可見此時云臺方位向均可以正常工作,階躍響應(yīng)超調(diào)和穩(wěn)態(tài)誤差都較小,但較小的濾波頻率會影響云臺的動態(tài)性能,實(shí)際會影響云臺方位向剛度。
由圖6,通過離線分析,速度環(huán)共振頻率約為170Hz,設(shè)計共振頻率點(diǎn)為170Hz,帶寬20Hz,深度-60db的陷波濾波器。速度環(huán)采用PI控制器和負(fù)載速度反饋采用200Hz一階低通濾波器時,速度環(huán)串入該陷波濾波器后,采集處于升起狀態(tài)下光電云臺方位向給定速度分別為0.5°/s、5°/s、30°/s時的速度響應(yīng)情況,速度環(huán)響應(yīng)曲線如圖9所示。5°/s子圖中左側(cè)小圖為上升時間段局部放大圖,右側(cè)小圖為穩(wěn)態(tài)誤差段局部放大圖。
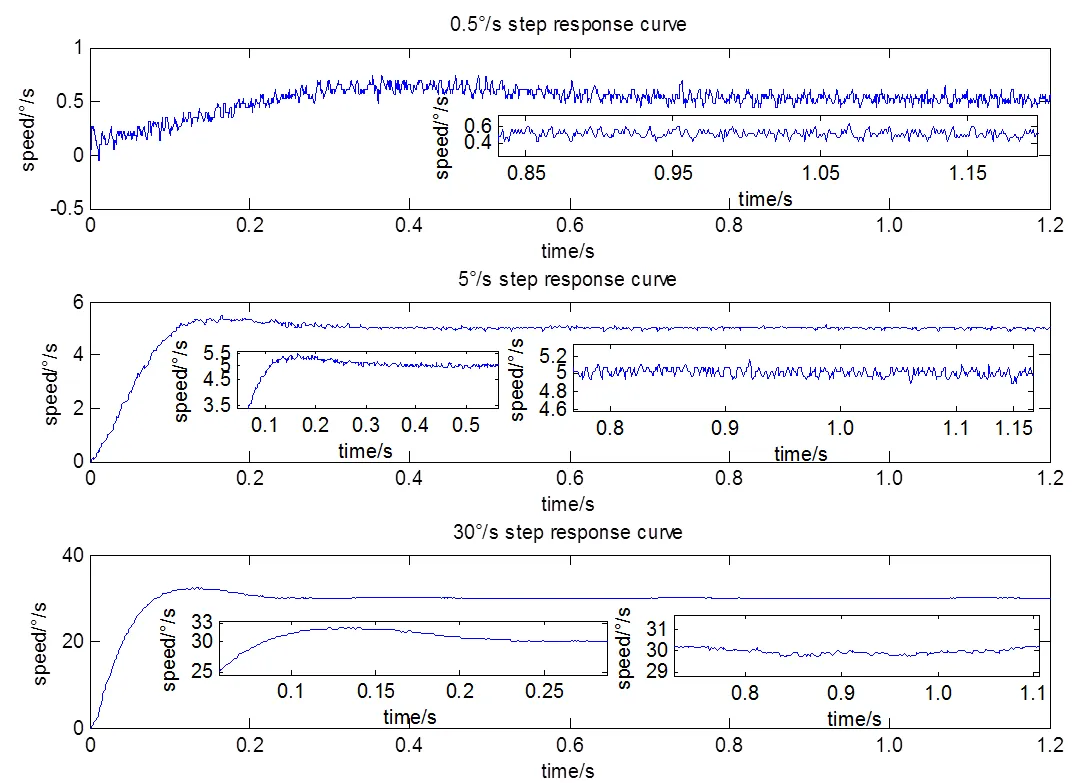
圖8 PI+二階60Hz巴特沃斯濾波器速度響應(yīng)曲線
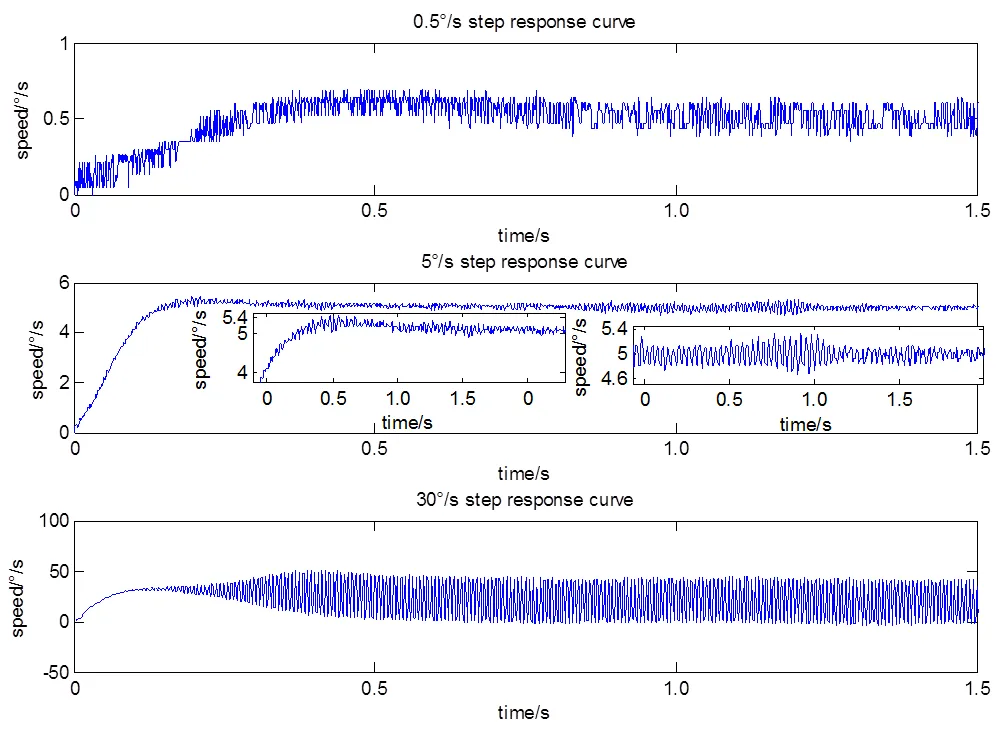
圖9 PI+陷波濾波器速度響應(yīng)曲線
可見速度環(huán)在轉(zhuǎn)速較低時尚能保持正常運(yùn)行,一旦轉(zhuǎn)速較高受到較強(qiáng)激勵時很容易再次發(fā)生共振。隨著云臺方位向的轉(zhuǎn)動,云臺方位向運(yùn)行位置的共振頻率點(diǎn)有所變化,使云臺難以保持在其他位置也正常運(yùn)行,單純的陷波濾波器難以適應(yīng)該系統(tǒng)的要求。也可通過在方位向多個位置進(jìn)行共振頻率測定方式,標(biāo)注多個共振頻率點(diǎn),但隨著桅桿長時間使用后結(jié)構(gòu)上進(jìn)一步松動老化,共振頻率又會發(fā)生變化,難以保證光電云臺系統(tǒng)持續(xù)運(yùn)行正常。
可見云臺方位向工作正常,沒有發(fā)生共振現(xiàn)象。
分別對比給定速度為0.5°/s、5°/s、30°/s時,采用LADRC+一階250Hz低通濾波器方式、采用PI控制器+二階60Hz巴特沃斯濾波器方式、采用PI控制器+陷波濾波器方式時的速度階躍響應(yīng)曲線,對比結(jié)果如表2所示。
由于給定速度為0.5°/s時,響應(yīng)曲線穩(wěn)態(tài)誤差較大,因此此時僅對比響應(yīng)快慢,不給出具體量化結(jié)果。由于使用陷波濾波器時,給定速度為30°/s時,系統(tǒng)發(fā)生共振,不給出此時的具體量化結(jié)果。
速度環(huán)采用LADRC控制器和負(fù)載速度反饋采用250Hz一階低通濾波器時,采集處于升起狀態(tài)下光電云臺方位向給定速度分別為0.5°/s、5°/s、30°/s時的速度響應(yīng)情況,速度環(huán)響應(yīng)曲線如圖10所示。5°/s、30°/s子圖中左側(cè)小圖為上升時間段局部放大圖,右側(cè)小圖為穩(wěn)態(tài)誤差段局部放大圖。
可見采用LADRC+一階250Hz低通濾波器方式響應(yīng)速度優(yōu)于其他兩種方式。在穩(wěn)態(tài)誤差上采用LADRC+一階250Hz低通濾波器方式略大于采用PI控制器+二階60Hz巴特沃斯濾波器方式,實(shí)際中可以考慮LADRC與二階巴特沃斯濾波器方式進(jìn)行結(jié)合使用。
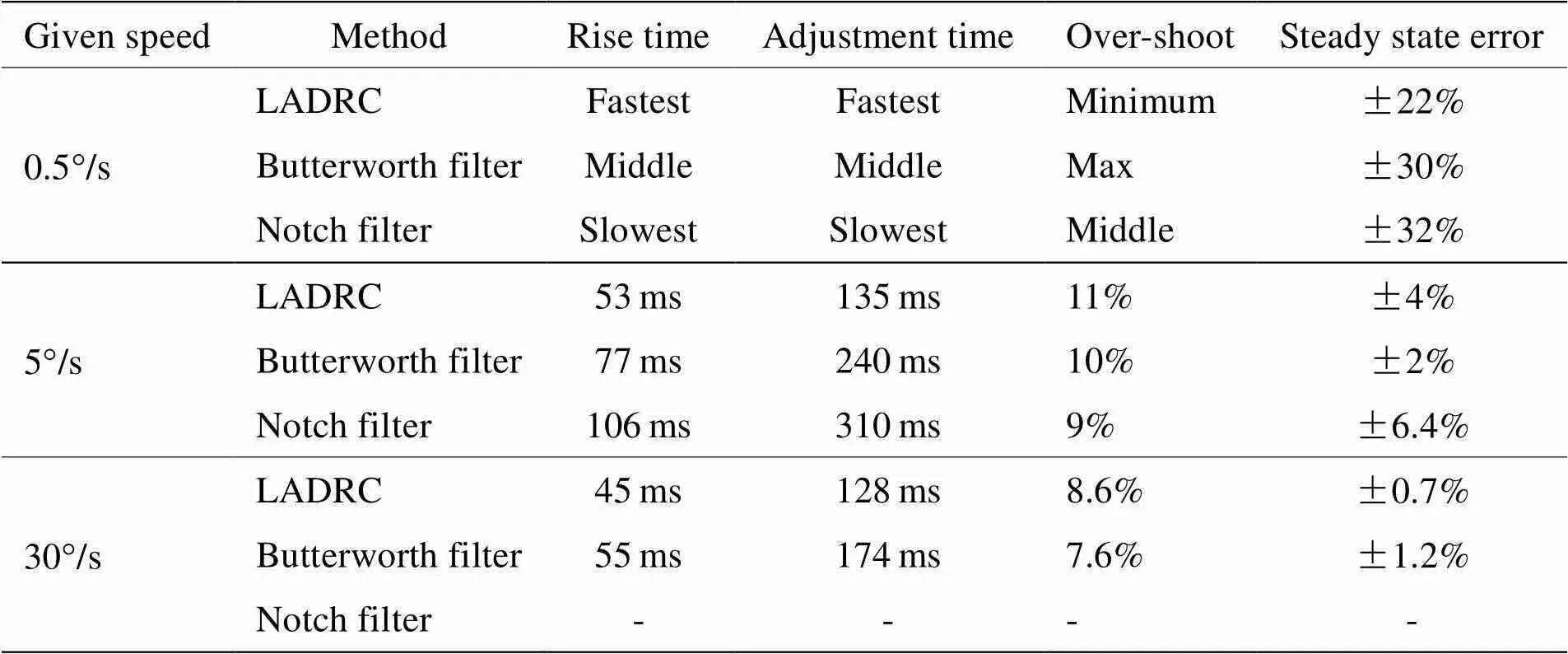
表2 不同給定轉(zhuǎn)速階躍響應(yīng)情況對照表
通過在云臺方位軸心20cm處增加一個2kg的配重測試采用LADRC+一階250Hz低通濾波器方式時系統(tǒng)的魯棒性,給定速度為0.5°/s、5°/s、30°/s時,增加配重前后階躍響應(yīng)對比情況如圖11所示。5°/s、30°/s子圖中左側(cè)小圖為上升時間段局部放大圖,右側(cè)小圖為穩(wěn)態(tài)誤差段局部放大圖。
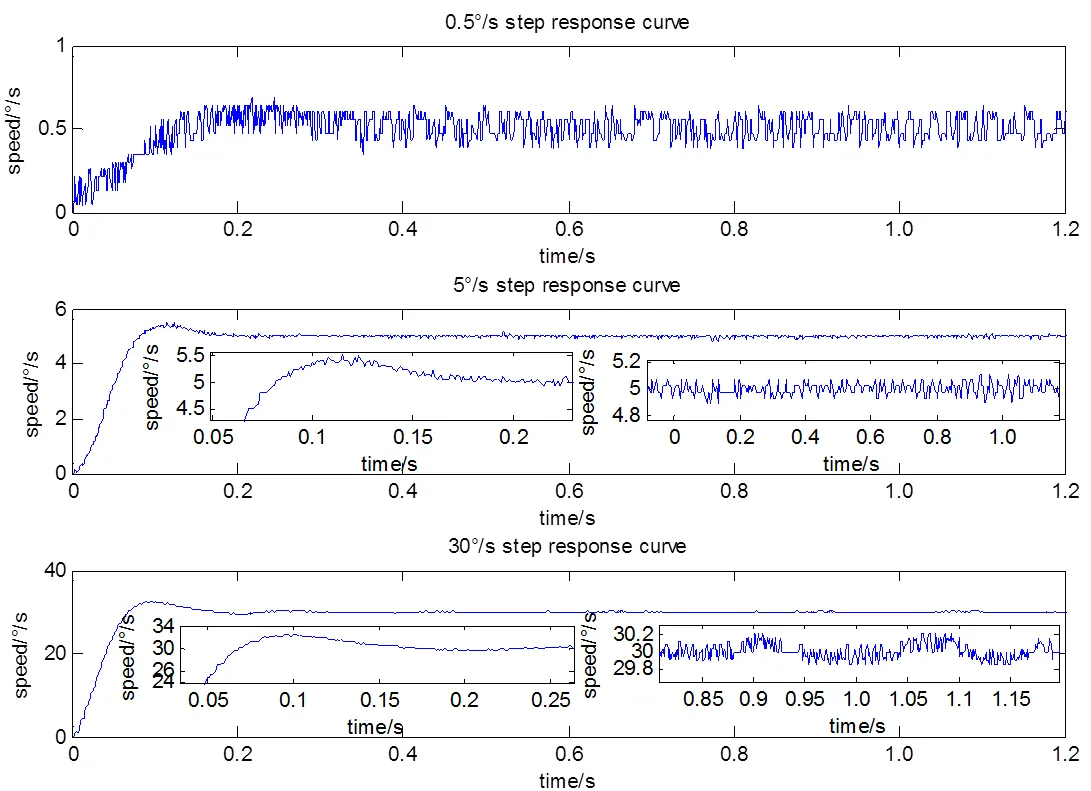
圖10 LADRC+一階低通濾波器速度響應(yīng)曲線
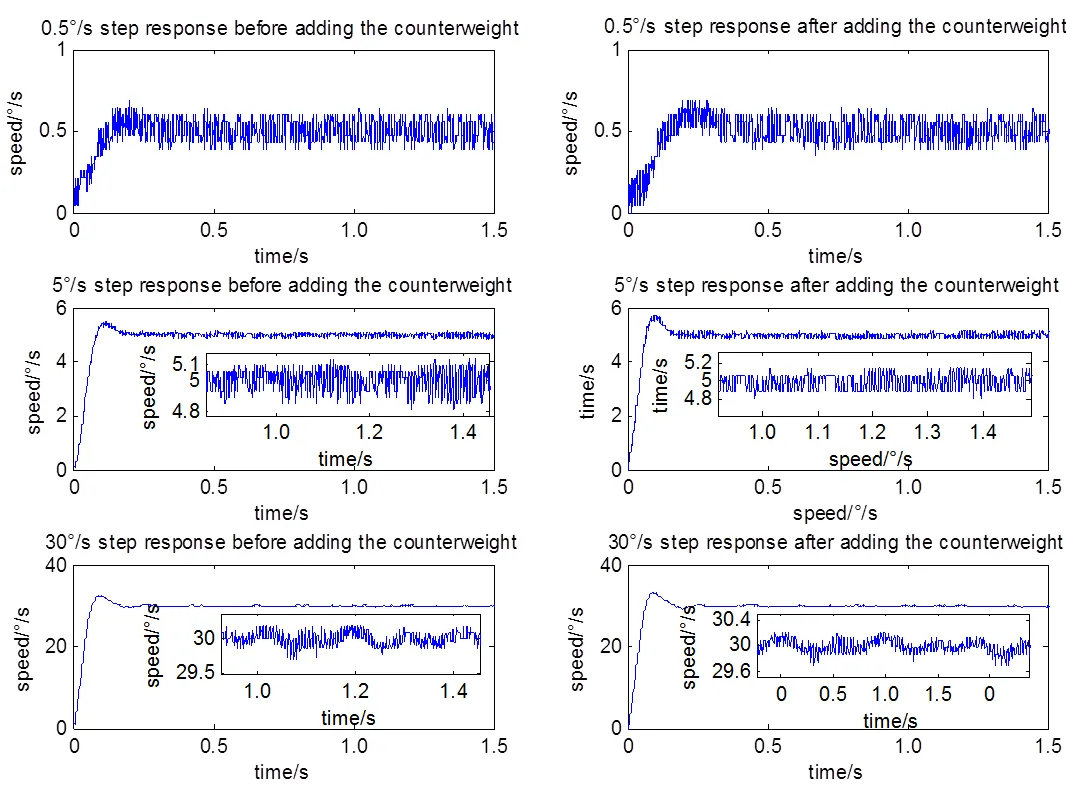
圖11 采用LADRC增加配重前后速度響應(yīng)曲線
在不同的給定速度下,增加配重前后的速度階躍響應(yīng)超調(diào)有所增加,給定轉(zhuǎn)速為5°/s時超調(diào)增加了5%,給定轉(zhuǎn)速為30°/s時,超調(diào)增加了2.6%。調(diào)節(jié)時間和穩(wěn)態(tài)誤差基本一致。
通過將給定速度分別置為5°/s、10°/s、-0°/s和-5°/s,觀察增加配重前后系統(tǒng)的動態(tài)響應(yīng)情況,如圖12所示。
結(jié)合圖11、圖12綜合對比,可見采用LADRC方式當(dāng)系統(tǒng)發(fā)生結(jié)構(gòu)變化也能以較好的性能正常工作,具有較好的魯棒性。
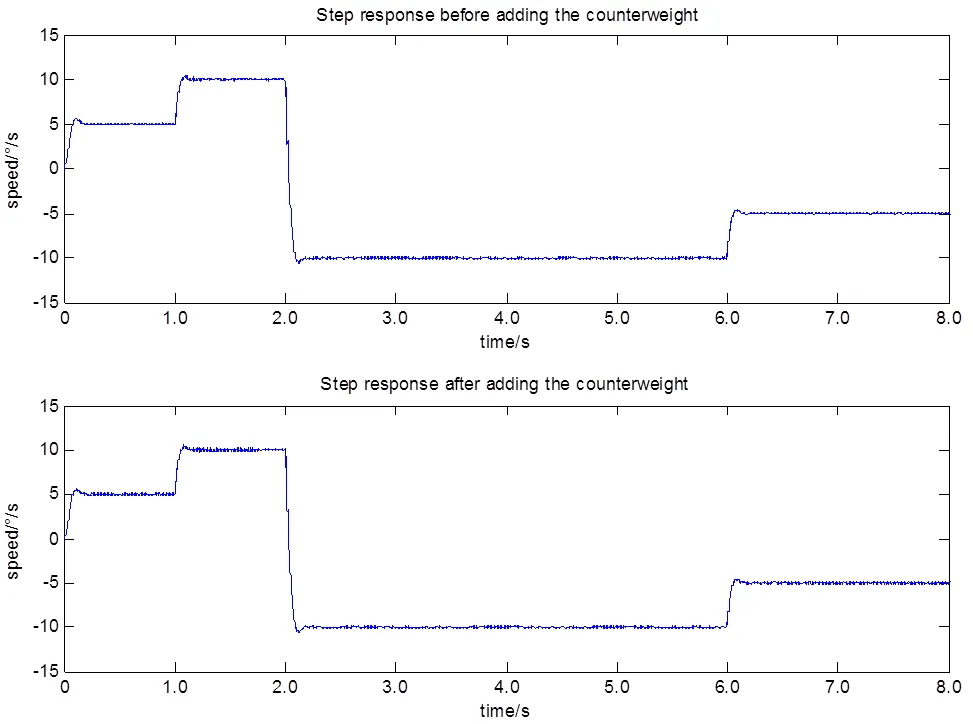
圖12 采用LADRC增加配重前后變速響應(yīng)曲線
4 結(jié)束語
文中針對車載升降式光電云臺在桅桿升起后云臺方位向轉(zhuǎn)動時容易共振的情況,通過對比巴特沃斯濾波器、陷波濾波器和自抗擾控制方式對云臺共振的抑制效果,總結(jié)出了適用于車載升降式光電云臺共振抑制的方法,可在升降式光電云臺使用領(lǐng)域得到廣泛應(yīng)用。
[1] 付存銀, 丁少華, 王兆基, 等. 堆垛機(jī)速度控制與立柱動態(tài)撓曲變形分析[J]. 機(jī)械設(shè)計與制造, 2019(6): 247-251. FU Cunyin, DING Shaohua, WANG Zhaoji, et al. Single mast stacker crane speed control and stand column dynamic flexure deformation analysis[J]., 2019(6): 247-251.
[2] 龔文全, 曾岳南, 黃之鋒, 等. 基于改進(jìn)型陷波器的伺服系統(tǒng)諧振抑制研究[J]. 機(jī)電工程, 2018, 37(7): 845-850. GONG Wenquan, ZENG Yuenan, HUANG Zhifeng, et al. Resonance suppression of servo system based on improved notch filter[J]., 2018, 37(7): 845-850.
[3] 龔文全, 羅炳章. 基于自適應(yīng)陷波濾波器的伺服系統(tǒng)諧振頻率估計及抑制[J]. 電機(jī)與控制應(yīng)用, 2019, 46(11): 37-42, 93. GONG Wenquan, LUO Bingzhang. Resonance frequency estimation and suppression of servo system based on adaptive notch filter[J]., 2019, 46(11): 37-42, 93.
[4] 喬治.埃利斯. 控制系統(tǒng)設(shè)計指南[M]. 北京: 機(jī)械工業(yè)出版社, 2016. George Ellis.[M]. Beijing: China Machine Press, 2016.
[5] 郭高潔. 伺服控制系統(tǒng)諧振實(shí)時抑制方法探究[D]. 北京: 中國科學(xué)院大學(xué), 2018. GUO Gaojie. Online resonance suppression exploration of Servo system[D]. University of Chinese Academy of Sciences, 2018.
[6] 黃正敏. 滾珠絲杠進(jìn)給系統(tǒng)二階陷波濾波抑振法研究[D]. 武漢: 華中科技大學(xué), 2019.HUANG Zhengmin. Research on Second-order Notch Filter Vibration Suppression Method of Ball Screw Feeding System[D]. Wuhan: Huazhong University of Science and Technology, 2019.
[7] ZHAO Shen, GAO Zhiqiang. An active disturbance rejection based approach to vibration suppression in two-intertia systems[J]., 2013, 15(2): 350-362.
[8] 李英杰, 李紹軍, 蔣鵬, 等. 一種高精度船只目標(biāo)光電定位系統(tǒng)設(shè)計與實(shí)現(xiàn)[J]. 紅外技術(shù), 2023, 45(10): 1090-1095.LI Yingjie, LI Shaojun, JIANG Peng, et al. Design and implementation of a high-precision ship target photoelectric positioning system[J]., 2023, 45(10): 1090-1095.
Resonance Suppression Method of Vehicle Mounted Lifting Photoelectric Platform
LI Shaojun,LI Yingjie,LI Wei,XU Zhe,WANG Guoyou,XU Yan,JIN Fansheng
(..,210000,)
To avoid obscuring the field of view, a photoelectric platform is usually placed on top of a lifting mast. The structural stiffness of the mast directly affects the stiffness of the photoelectric platform servo system and its dynamic performance. In actual use, it is deduced that an insufficient stiffness of the mast causes the photoelectric platform to resonate easily in the process of azimuthal rotation, causing it to work unstably. To solve this problem, a Butterworth low-pass filter, notch filter, and linear auto disturbance rejection control mode are introduced successively to suppress the resonance phenomenon of the lifting photoelectric pan tilt table. By comparing the advantages and disadvantages of the three methods, it is concluded that the linear ADRC method has the advantages of fast response, good resonance suppression effect, and good robustness, and is suitable for the control system of the lifting photoelectric photoelectric platform.
photoelectric platform, lifting mast, Butterworth filter, notch filter, LADRC
TN06
A
1001-8891(2024)04-0406-07
2022-12-06;
2024-04-06.
李紹軍(1989-),男,碩士,從事云臺伺服控制技術(shù)研究。E-mail:lsj_gdsf@163.com。