電液作動器摩擦補償指令濾波控制研究
2024-04-27 00:16:26周登寶任廣安宋錦春
機械設(shè)計與制造 2024年4期
關(guān)鍵詞:指令
葉 寧,周登寶,任廣安,宋錦春
(1.沈陽理工大學(xué)自動化與電氣工程學(xué)院,遼寧 沈陽 110159;2.長沙理工大學(xué)汽車與機械工程學(xué)院,湖南 長沙 410114;3.東北大學(xué)機械工程與自動化學(xué)院,遼寧 沈陽 110819)
1 引言
液壓系統(tǒng)因其高功率重量比和快速響應(yīng),在工業(yè)領(lǐng)域得到了廣泛的應(yīng)用[1-2]。然而,液壓伺服系統(tǒng)存在著內(nèi)在非線性、模型不確定等因素,嚴(yán)重影響了系統(tǒng)的性能,給高性能控制帶來了極大的挑戰(zhàn)[3]。對此,文獻(xiàn)[4]在泵控液壓缸系統(tǒng)中應(yīng)用自適應(yīng)反步控制技術(shù),取得了良好的控制效果。文獻(xiàn)[5]針對液壓系統(tǒng)的不確定性,提出了一種基于魯棒自適應(yīng)的控制方法。文獻(xiàn)[5-6]在電液伺服機構(gòu)中利用反饋線性化自適應(yīng)控制技術(shù)驗證了跟蹤性能。已有的研究成果能夠較好地處理結(jié)構(gòu)不確定性,比如參數(shù)自適應(yīng)等,但是未考慮非結(jié)構(gòu)不確定性,比如非線性摩擦力等。
目前國內(nèi)外已有不少關(guān)于伺服系統(tǒng)摩擦力補償?shù)难芯浚渲心Σ亮δP褪亲畛R姷囊环N,它能反映出伺服系統(tǒng)摩擦力的基本特性,且易于計算。在此基礎(chǔ)上對模型進(jìn)行改進(jìn)以改善補償效果[7-8]。在工程應(yīng)用中,受到重量和結(jié)構(gòu)等自身的限制,實際應(yīng)用中不會安裝壓力和速度傳感器,不會對測量內(nèi)部摩擦狀況,因此,對于這個問題,最有效的辦法就是使用輸出反饋的方式來解決。文獻(xiàn)[8]將輸出反饋混合使用摩擦補償應(yīng)用在電液伺服系統(tǒng)中,獲得了較好的控制效果。在面對大負(fù)荷未知和高頻響應(yīng)的情況下,文獻(xiàn)[9]通過使用高增益觀測器輸出反饋控制方法,成功實現(xiàn)了出色的跟蹤精度。采用反步控制方式盡管在試驗中獲得了較好的結(jié)果,但其內(nèi)在的多次求導(dǎo)問題給實際應(yīng)用造成了很大的局限,而指令濾波控制技術(shù)則較動態(tài)面控制方式有較高的跟蹤精度[10-12]。項目擬采用基于全狀態(tài)反饋指令濾波控制策略,并采用改進(jìn)的摩擦力補償技術(shù),有效解決作動器結(jié)構(gòu)化與非結(jié)構(gòu)化不確定性問題;在此基礎(chǔ)上提出一種基于一階微分反步控制方法,以減少實時計算量;該方法能較好地約束控制輸入,更加符合實際工程。然后,運用李雅普諾夫函數(shù)對該閉環(huán)系統(tǒng)漸近穩(wěn)定性分析。最后,進(jìn)行了比較試驗,結(jié)果表明,提出的算法是有效的。
2 系統(tǒng)動態(tài)模型
泵控電液作動器由雙出桿液壓缸、定排量泵、伺服電機等構(gòu)成,物理結(jié)構(gòu),如圖1所示。活塞的運動方程式,由牛頓第二定律得出:
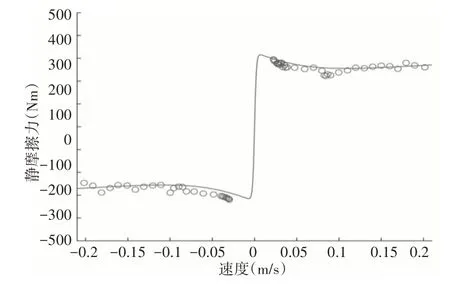
圖1 摩擦力Stribeck 曲線Fig.1 Stribeck Curve of Friction
式中:F—摩擦力和外擾;A—活塞環(huán)形面積;Pa、Pb—液壓缸兩端壓力;—活塞加速度;m—質(zhì)量。
不考慮外部泄露,考慮到作動器的可壓縮性和流體暫態(tài)動態(tài),作動器兩側(cè)連續(xù)方程為:
式中:βe—有效彈性模量;V01、V02—作動器活塞兩側(cè)體積(含管路);Q1、Q2—油源流量。定義狀態(tài)變量:x=[x1,x2,x3]=[xp,APl∕m],xp和—活塞的位置和速度;A—活塞桿環(huán)形接觸面積;Pl=Pa-Pb—負(fù)載壓力;Kleak—內(nèi)泄露系數(shù);qb—液壓泵每轉(zhuǎn)流量;ωm—伺服電機轉(zhuǎn)速;Ql=KleakPl—內(nèi)泄露量。F可以表示為Ff摩擦力和Fe外干擾的和。Ff表示為:
式中:z—內(nèi)摩擦狀態(tài);σ0—剛毛剛度;σ1—硬毛的阻尼系數(shù);α2—恒定或變化的摩擦參數(shù);Fc與σ0|zss|有關(guān);s(|x2|)—非遞增連續(xù)函數(shù),g(x2)—stribeck效應(yīng);經(jīng)過EHA實驗平臺測定穩(wěn)態(tài)靜摩擦和速度關(guān)系,如圖1所示。
靜摩擦的近似表示方式為:
式中:νs—Stribeck 速度。方程N(x2)=x2∕g(x2)。結(jié)合式(1)~式(4),動態(tài)模型方程為:
式中:KL=mKleak∕A;β=Aβe∕m;qb—泵單位轉(zhuǎn)數(shù)排量。
方程式g1(x1)=β(V01+V02)∕(V01+Ax1)(V02-Ax1);
方程式g2(x1)=βQ1∕(V01+Ax1)-βQ2∕(V02-Ax1)。
3 輸出反饋自適應(yīng)魯棒指令濾波設(shè)計
3.1 控制模型設(shè)計
定義θ=[θ1,θ2,θ3]T,其中θ1=σ0∕m,θ2=σ1∕m,θ3=(σ1+σ2)∕m。d1=Fe∕m,d2=(β∕V01+Ax1)-β∕(V02-Ax1))Δp,Δp—模型誤差。重新定義系統(tǒng)方程:
式中:D=kmqbωm轉(zhuǎn)換參數(shù);km—常數(shù);u—輸入值。
假設(shè)1:作動器兩側(cè)壓力pa和pb有界。
假設(shè)2:模型和參數(shù)滿足以下約束:
其中,Δf1,Δf2為正常數(shù)。
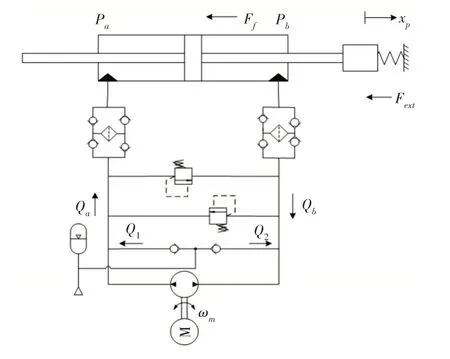
圖2 電液伺服作動器Fig.2 Electro-Hydraulic Servo Actuator
3.2 投影映射和參數(shù)自適應(yīng)
其中,i=1,2,3。自適應(yīng)法表達(dá)式為:
3.3 投影映射
估計誤差=-xi,i=1,2,3。確保觀測器全局漸進(jìn)穩(wěn)定。控制器設(shè)計時給出壓力狀態(tài)量x3的估計方程。估計摩擦狀態(tài)量z采用雙投影觀測器,表達(dá)式如下:
式中:—內(nèi)摩擦狀態(tài)z1、z2的估計值;?1、?2—學(xué)習(xí)函數(shù)。投影函數(shù)為:
其中,i=1,2。z有物理邊界且保證如下性質(zhì):
3.4 指令濾波控制器設(shè)計
設(shè)計以下指令濾波方程來解決多次微分問題;
式中:xi+1c(t)=φi,1和+1c(t)=ωiφi,2—濾波器輸出;ωi—自然頻率;?—阻尼參數(shù)濾波初始條件為φi,1(0)=αi(0),φi,2(0)=0,i=1,2∕φi,1-αi|≤ρi。指令濾波反步法跟蹤誤差定義為:
式中:xic—指令濾波輸出,x1c=xd。選擇虛擬輸入控制函數(shù)
誤差補償信號γ1γ2γ3定義為:
補償跟蹤誤差定義為:
實際控制輸入u=ua+us,us=us1+us2。
3.5 主要結(jié)果
非連續(xù)投影映射中的自適應(yīng)函數(shù)τ為:
投影內(nèi)摩擦狀態(tài)學(xué)習(xí)函數(shù)為:
k0=0.5 min(ki),i=1,2,3,λ1和λ2代表了學(xué)習(xí)增益。
定理:非線性泵控電液作動器(5),在有限時間t0,可以忽略模型誤差(d1=0,d2=0,=0),系統(tǒng)僅存在非線性摩擦和參數(shù)不確定性。在假設(shè)1-2,屬性(11)~(14)被滿足,指令濾波控制器(15)~(19),投影自適應(yīng)法則(10),自適應(yīng)函數(shù)(21);摩擦觀測器(12),學(xué)習(xí)函數(shù)(22)可以保證所有閉環(huán)信號有界,系統(tǒng)漸進(jìn)穩(wěn)定。信號t→∞,ν(t) →0,且有
4 比較性實驗結(jié)果
在泵控電液作動器實驗臺上進(jìn)行驗證來驗證控制器設(shè)計。實驗臺參數(shù)如下:m=11.5kg,A=6.4×10-4m2,βe=1200×106Pa,qb=6×10-6m3∕rev,km=4.17rev∕(s·v),Kleak=2.4×10-11m3∕(s·Pa),Q1=Q2=1.8×10-6m3∕s,摩擦力改進(jìn)摩擦參數(shù):c1=416,c2=14.9,c3=458.9,fs=525N,fc=360.5。采樣時間1ms。通過三種控制器的性能比較,以檢驗其有效性。
CFCS:該控制器提出的基于輸出反饋的指令濾波控制器,其中包含了改進(jìn)的摩擦力補償模型。
參數(shù):k1=400,k2=600,k3=10,k4=1000,ω1=1000,ω2=ω3=1000,h2=300,h3=0.01。
參數(shù)估計范圍:
估計函數(shù)的初始條件是:
自適應(yīng)速度矩陣:
摩擦力估計速率:λ1=2×10-4,λ2=2×10-4,估計變量z的邊界zmax=2×10-5,zmin=-2×10-5。
摩擦補償指令濾波控制器(CFCF):該控制器與這里提出的抗飽和指令濾波控制器具有相同的LuGre摩擦補償,但是不具備抗飽和能力。因此,無輔助系統(tǒng)設(shè)計即=0,其他控制參數(shù)與CFCS控制器相同。
指令濾波控制器(CFCI):該控制器與CFCS控制比較具有抗飽和性能沒有LuGre摩擦補償,設(shè)定=0=0,λ1=0,λ2=0,其他控制參數(shù)相同。
工況(1):實驗中,三種控制器將會被測試,用以驗證其跟蹤性能。液壓缸的目標(biāo)位置軌跡為x1d,表達(dá)式為x1d=30 arctanh(s in(πt))[1-e-t]∕0.7854,該軌跡為光滑的常速運動。輸入飽和值的電壓限定為[-3,3]V。CFCS控制器的位置跟蹤性能,如圖3所示。三種控制器跟蹤誤差,如圖4所示。三種控制器性能指標(biāo),如表1所示。
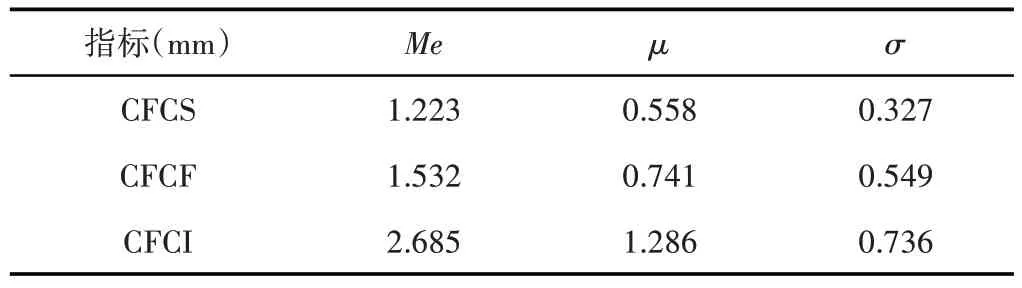
表1 常速運動性能指標(biāo)Tab.The Performance Indices for Normal Motion
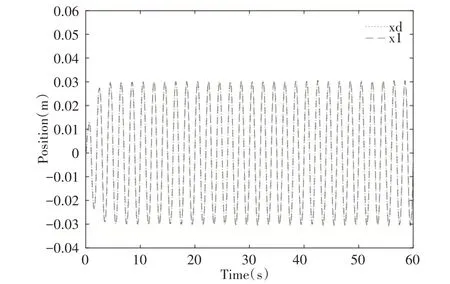
圖3 常速下CFCS位置跟蹤性能Fig.3 The Position Tracking of CFCS for Tracking Demands for Normal Motion
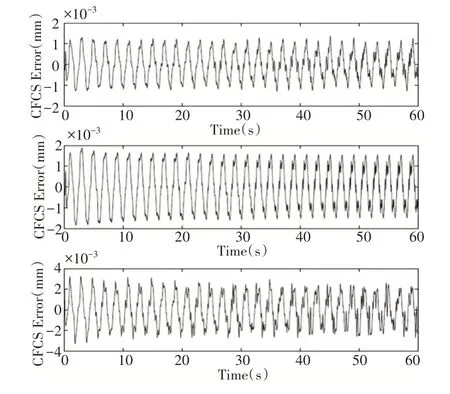
圖4 常速情況下三種控制器跟蹤誤差Fig.4 The Tracking Errors of Three Controllers for Normal Motion
從圖4和表1可以看出,控制器CFCS性能優(yōu)于其他兩個控制器,原因在于控制器CFCS通過Nussbaum函數(shù)輔助系統(tǒng)壓制了伺服電機的控制飽和,非線性摩擦通過改進(jìn)的連續(xù)摩擦力模型進(jìn)行補償。從圖4中可以看出CFCF控制器由于具有摩擦補償使得跟蹤誤差近似。但CFCF控制器采用指令濾波技術(shù)有著更小的在線計算負(fù)擔(dān)。控制器CFCF和CFCS比較,如圖5所示。從中可看CFCS控制器誤差更小。
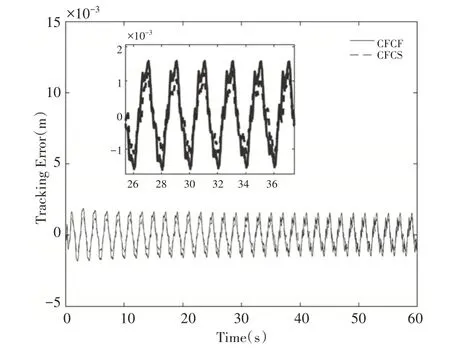
圖5 放大比較控制器CFCS和CFCF跟蹤誤差Fig.5 Zoomed Comparative Tracking Errors of CFCS and CFCF
如圖6所示可以看出,控制器CFCS輸入電壓的抗飽和能力。由于重摩擦原因,在電壓限制的情況下EHA系統(tǒng)將產(chǎn)生輸入飽和現(xiàn)象。輸入飽和被Nussbaum函數(shù)N(x)降低從而使得控制器CFCS的跟蹤誤差減小,輸入飽和被壓制。
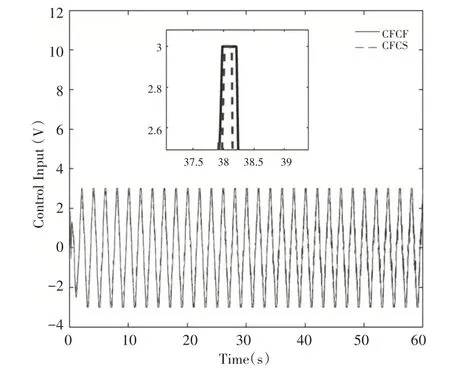
圖6 控制器CFCS和CFCF控制輸入比較Fig.6 Comparative Control Inputs of CFCS and CFCF
控制器CFCS中未知參數(shù)的估計值顯示,如圖7所示。未知參數(shù)包含液壓未知參數(shù)和摩擦模型未知參數(shù),從圖中可以看出所有未知參數(shù)均為有界且最終收斂到某個固定值,其中θ5到θ9幾乎為初始值。由此,可以看出CFCS控制器在常速且有輸入飽和及摩擦的情況下可以保證系統(tǒng)的控制性能。
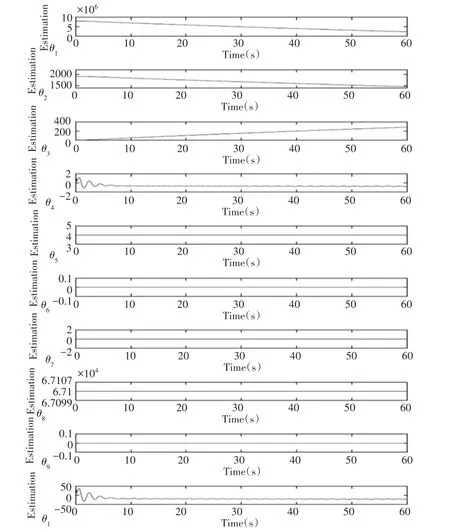
圖7 控制器CFCS參數(shù)估計值(摩擦、液壓)Fig.7 Parameter Estimation of CFCS(Friction Hydraulic)
工況(2):為進(jìn)一步驗證提出CFCS控制器有效性,選定相對慢速目標(biāo)跟蹤軌跡表達(dá)式:x1d=30 arctanh(s in(πt∕6))[1-e-t]∕0.7854。
輸入飽和電壓范圍設(shè)定為[-0.7,0.7]V。控制器CFCS位置跟蹤軌跡,如圖8所示。在慢速運動中,目標(biāo)運動速度要慢于之前的運動速度,三種控制器得到跟蹤誤差,如圖9、表2所示。表格2通過3個統(tǒng)計指標(biāo)度量控制性能。在這種運動情況下,非線性摩擦成為了影響控制質(zhì)量的更加重要的因素。根據(jù)實驗,從圖9中可以看出控制器CFCS仍然取得了最好的控制性能。而沒有摩擦補償?shù)腃FCI控制器的暫態(tài)誤差是有摩擦補償?shù)腃FCS控制器和CFCF控制器的2倍。
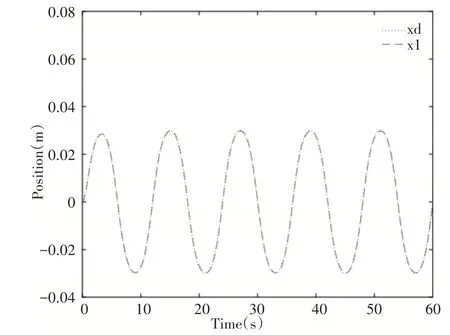
圖8 慢速運動位置跟蹤軌跡Fig.8 Slow Motion Position Tracking Trajectory
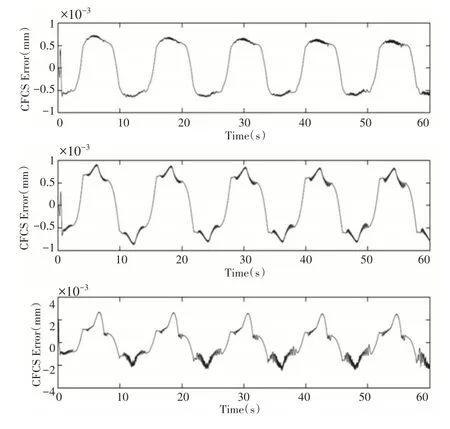
圖9 慢速條件下三種控制器跟蹤誤差Fig.9 The Tracking Errors of Three Controllers for Slow Motion
如圖1所示,我們可以清楚的看到液壓缸前向運動和后向運動在低速條件下的摩擦力是不同的,所以沒有摩擦補償?shù)目刂破鰿FCI前向運動和后向運動的跟蹤誤差非對稱。
從圖10可以看出為控制器CFCS和控制器CFCF跟蹤誤差的放大比較。在每一個飽和點控制器CFCS的跟蹤誤差都要好于控制器CFCF。并且兩種控制器比較來看,控制器CFCS在每一個飽和點結(jié)束后,控制輸入信號都可以迅速恢復(fù)到非飽和狀態(tài)而沒有明顯的信號抖動,如圖11所示。
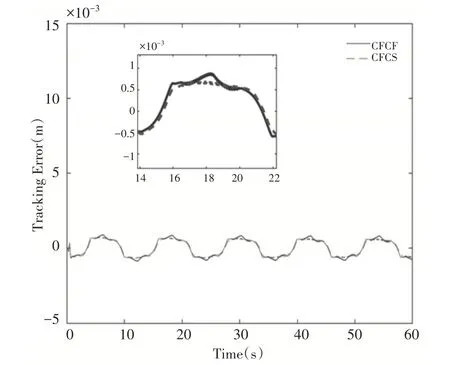
圖10 控制器CFCS和控制器CFCF誤差比較Fig.10 Comparative Tracking Errors of CFCS and CFCF
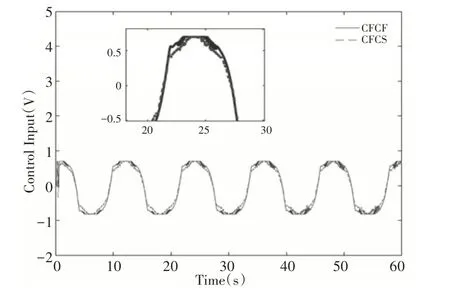
圖11 比較控制器CFCS和控制器CFCF的控制輸入Fig.11 Comparative Control Inputs of CFCS and CFCF
為了證實控制器CFCS穩(wěn)定性及自然頻率參數(shù)ω1對跟蹤誤差的影響效果,我們在位置反饋中注入可測量的擾動。在系統(tǒng)運行的第10s到第15s期將擾動信號注入到系統(tǒng)中,擾動信號為d=0.005。擾動注入后,控制系統(tǒng)的輸入表達(dá)式為υ-d。目標(biāo)運動軌跡設(shè)定為xd=30 arctanh(s in(πt∕6))[1-e-t]∕0.7854。限制電壓設(shè)定為[-3,2,3.2]V。控制器跟蹤誤差,如圖12所示。圖中控制器在ω1=100和ω1=1100兩種參數(shù)設(shè)定下進(jìn)行誤差比較。從圖中可以看出在可測量擾動消失后即系統(tǒng)運動在第15s后,CFCS控制器可以迅速的恢復(fù)到未飽和動態(tài)響應(yīng)狀態(tài)。具有參數(shù)為ω1=1100的CFCS控制器可以得到更小的跟蹤誤差。從中可以顯示出,提出的具有Nussbaum函數(shù)N(x)輔助系統(tǒng)的CFCS控制器不僅具有良好的抗飽和能力同時具有出色的穩(wěn)定性。
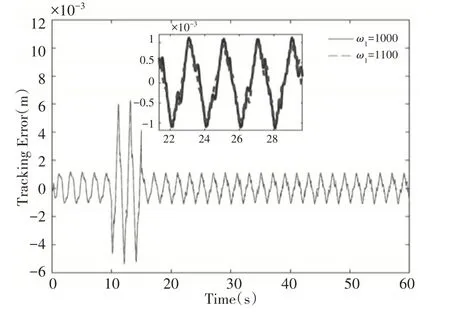
圖12 在強擾動情況下控制器CFCS在不同自然頻率下的跟蹤誤差比較Fig.12 Comparative Tracking Errors of CFCS With Different Natural Frequencies Under Heavy Disturbance Condition
5 結(jié)論
針對電液伺服作動器高壓環(huán)境下的重摩擦問題,提出一種基于狀態(tài)反饋摩擦補償?shù)闹噶顬V波控制方法。以實現(xiàn)系統(tǒng)的最佳漸近穩(wěn)定性。通過泵控電液作動器實驗臺上進(jìn)行實驗,驗證了該方法的有效性,為解決上述問題尋找新的方法。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
時代農(nóng)機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學(xué)院學(xué)報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
