占空比傳輸機(jī)制下基于協(xié)同預(yù)測(cè)的時(shí)變不確定系統(tǒng)遞推濾波
2024-04-26 18:47:21高宏宇余林棟胡銀鴿李悅侯男
化工自動(dòng)化及儀表 2024年2期
高宏宇 余林棟 胡銀鴿 李悅 侯男


DOI:10.20030/j.cnki.1000-3932.202402012
基金項(xiàng)目:國(guó)家自然科學(xué)基金(批準(zhǔn)號(hào):62103096,62073070)資助的課題;黑龍江省自然科學(xué)基金(批準(zhǔn)號(hào):LH2021F006)資助的課題;海南省科技計(jì)劃三亞崖州灣科技城聯(lián)合基金(批準(zhǔn)號(hào):2021JJLH0025)資助的課題。
作者簡(jiǎn)介:高宏宇(1979-),副教授,從事復(fù)雜系統(tǒng)濾波、先進(jìn)控制理論和智能控制的研究。
通訊作者:侯男(1990-),副教授,從事復(fù)雜網(wǎng)絡(luò)狀態(tài)估計(jì)、故障估計(jì)和魯棒控制的研究,bayan2@163.com。
引用本文:高宏宇,余林棟,胡銀鴿,等.占空比傳輸機(jī)制下基于協(xié)同預(yù)測(cè)的時(shí)變不確定系統(tǒng)遞推濾波[J].化工自動(dòng)化及儀表,2024,51(2):227-236.
摘 要 以工業(yè)互聯(lián)網(wǎng)為背景,研究占空比傳輸機(jī)制下一類時(shí)變不確定系統(tǒng)的濾波問(wèn)題,結(jié)合協(xié)同預(yù)測(cè)方法設(shè)計(jì)了新穎的遞推濾波算法,解決了占空比傳輸機(jī)制下濾波性能降低的問(wèn)題。首先給出描述占空比傳輸機(jī)制的數(shù)學(xué)模型,然后提出結(jié)合協(xié)同預(yù)測(cè)方法的遞推濾波方案,設(shè)計(jì)基于占空比機(jī)制的遞推濾波算法,推導(dǎo)了濾波誤差協(xié)方差矩陣的一個(gè)上界,隨后分析這個(gè)上界的有界性,實(shí)現(xiàn)了在稀疏數(shù)據(jù)情形下提高濾波性能的目的。仿真結(jié)果驗(yàn)證了所提算法的高效性和有效性。
關(guān)鍵詞 遞推濾波 傳輸機(jī)制 占空比 協(xié)同預(yù)測(cè) 時(shí)變不確定系統(tǒng) 稀疏數(shù)據(jù) 基于項(xiàng)目的算法
中圖分類號(hào) TP14?? 文獻(xiàn)標(biāo)志碼 A?? 文章編號(hào) 1000-3932(2024)02-0227-10
數(shù)十年來(lái),國(guó)內(nèi)外眾多學(xué)者致力于系統(tǒng)的濾波/狀態(tài)估計(jì)研究,并取得了許多優(yōu)秀的成果[1~4]。到目前為止,濾波作為狀態(tài)估計(jì)的一種有效方法,已成功應(yīng)用于石油、地質(zhì)、電力、軍事、航空航天等領(lǐng)域。在當(dāng)前眾多的濾波方法中(如H∞濾波方法、集員濾波方法等),遞推濾波由于具有突出的實(shí)時(shí)計(jì)算能力,獲得了大量學(xué)者的關(guān)注[5~8]。
隨著網(wǎng)絡(luò)化工業(yè)系統(tǒng)的快速發(fā)展,大量具有遠(yuǎn)傳功能的無(wú)線傳感器在實(shí)際工業(yè)中被廣泛應(yīng)用,這些傳感器通過(guò)共享的無(wú)線網(wǎng)絡(luò)按照特定的通信協(xié)議進(jìn)行信息傳輸,其通信過(guò)程消耗了巨大能量,發(fā)揮重要作用的同時(shí)增加了維護(hù)難度與維護(hù)成本。當(dāng)下,我國(guó)低碳建設(shè)正穩(wěn)步推進(jìn),工業(yè)現(xiàn)場(chǎng)對(duì)傳感器通信過(guò)程的節(jié)能要求大幅提高。在此背景下,基于占空比的傳輸機(jī)制由于其突出的節(jié)能特性在實(shí)際工程中備受青睞。但需要注意的是,該機(jī)制下,由于發(fā)送的數(shù)據(jù)量顯著減少甚至較稀疏,使得生產(chǎn)現(xiàn)場(chǎng)數(shù)據(jù)監(jiān)測(cè)不全面,加之外界其他客觀因素(如未知干擾、通信網(wǎng)絡(luò)不穩(wěn)定等)的影響,可能加劇信息獲取的不完整程度,影響生產(chǎn)狀態(tài)信息的準(zhǔn)確掌握,進(jìn)而影響生產(chǎn)決策的及時(shí)制定。因此,占空比機(jī)制下系統(tǒng)的濾波問(wèn)題亟待解決。近年來(lái),通信協(xié)議下的系統(tǒng)濾波已成為國(guó)內(nèi)外控制領(lǐng)域的研究熱點(diǎn)之一[9~13],文獻(xiàn)[14]考慮輪詢通信協(xié)議下一類隨機(jī)時(shí)變系統(tǒng)的分布式遞推濾波問(wèn)題,設(shè)計(jì)了有效的濾波算法;文獻(xiàn)[15]研究了隨機(jī)接入?yún)f(xié)議下一類網(wǎng)絡(luò)化線性時(shí)變系統(tǒng)的遞推濾波問(wèn)題。然而,占空比傳輸機(jī)制下系統(tǒng)的濾波研究目前仍未真正開始,相關(guān)的理論研究工作亟待展開。此外,系統(tǒng)的不確定現(xiàn)象通常需要在濾波器的設(shè)計(jì)過(guò)程中加以考慮。在實(shí)際應(yīng)用中,許多因素都會(huì)引發(fā)系統(tǒng)產(chǎn)生不確定性,如建模誤差、隨機(jī)產(chǎn)生的信息、未知干擾等。不確定性幾乎是不可避免的,且其無(wú)法用確定的量描述。如果在濾波器設(shè)計(jì)時(shí)未合理地考慮并處理這種不確定性,那么它將對(duì)系統(tǒng)造成很大的負(fù)面影響,甚至導(dǎo)致整個(gè)系統(tǒng)崩潰。目前,不確定系統(tǒng)的狀態(tài)估計(jì)問(wèn)題受到了許多關(guān)注[16~18],文
獻(xiàn)[19]研究了一類不確定遺傳調(diào)節(jié)網(wǎng)絡(luò)的狀態(tài)估計(jì)算法,其中建模誤差由具有凸多面體約束的參數(shù)不確定性描述;文獻(xiàn)[20]在對(duì)一類隨機(jī)不確定系統(tǒng)進(jìn)行魯棒濾波設(shè)計(jì)時(shí),采用范數(shù)有界矩陣表征了其中的不確定性。
筆者研究占空比機(jī)制下系統(tǒng)的遞推濾波問(wèn)題,以一類時(shí)變不確定系統(tǒng)為對(duì)象,在測(cè)量數(shù)據(jù)稀疏情形下,提出一種新穎高效的遞推濾波算法。
1 問(wèn)題描述
1.1 系統(tǒng)模型
考慮如下一類時(shí)變不確定系統(tǒng):
x=(A+ΔA)x+Bωy=Cx+v(1)
其中,x∈R與y∈R分別表示通信傳輸之前系統(tǒng)k時(shí)刻的狀態(tài)及測(cè)量輸出;A為系統(tǒng)矩陣;C為系統(tǒng)的測(cè)量矩陣;B為適維已知矩陣;ω∈R與v∈R分別為系統(tǒng)的過(guò)程噪聲和測(cè)量噪聲,ω與v為零均值高斯白噪聲,協(xié)方差矩陣分別為Q及Q,并假設(shè)ω與v在任意k時(shí)刻互不相關(guān)。ΔA為具有如下形式的范數(shù)有界時(shí)變不確定性:
ΔA=UVW(2)
其中,U、W及V均具有適當(dāng)維數(shù),U和W為已知的時(shí)變矩陣;V為范數(shù)有界的未知時(shí)變矩陣,滿足:
VV≤I,?坌k≥0(3)
其中,I為適維單位矩陣。
如果式(2)、(3)同時(shí)成立,則稱參數(shù)不確定性ΔA為可容許的不確定性。
接下來(lái),構(gòu)造如下形式的濾波器:
=A=+K(-ΛC)(4)
其中,和分別為狀態(tài)x在k時(shí)刻的估計(jì)及一步預(yù)測(cè);K為k+1時(shí)刻待設(shè)計(jì)的濾波器增益;Λ為對(duì)角矩陣;C為k+1時(shí)刻的測(cè)量矩陣;
為k+1時(shí)刻濾波器端接收到的測(cè)量輸出。
1.2 占空比傳輸機(jī)制
占空比傳輸機(jī)制(Duty Cycle Transmission Mechanism,DCTM)是休眠/激活無(wú)線傳輸機(jī)制的一種,其中,占空比d是指一個(gè)周期內(nèi)激活時(shí)間與這個(gè)周期時(shí)間的比值。如圖1所示,一個(gè)周期時(shí)間T包含了激活時(shí)間T與休眠時(shí)間T。
圖1 激活時(shí)間、休眠時(shí)間與周期時(shí)間
由占空比的定義可知:
d(5)
在該機(jī)制下,無(wú)線傳感器處于激活狀態(tài)時(shí)發(fā)送數(shù)據(jù),處于休眠狀態(tài)時(shí)不發(fā)送數(shù)據(jù)。顯然,為了降低無(wú)線傳感器的能耗、延長(zhǎng)設(shè)備的使用壽命,傳感器應(yīng)盡可能保持休眠,只在需要時(shí)才被激活。也正因如此,DCTM表現(xiàn)出了優(yōu)越的節(jié)能特性。在該機(jī)制下,無(wú)線傳感器節(jié)點(diǎn)的工作狀態(tài)根據(jù)預(yù)設(shè)的占空比在激活和休眠之間變化。可見(jiàn),占空比是這種傳輸節(jié)能技術(shù)的一個(gè)關(guān)鍵參數(shù)。
需要注意,由于DCTM的引入,在節(jié)能降耗的同時(shí),測(cè)量數(shù)據(jù)的發(fā)送量明顯減少,這將影響系統(tǒng)的濾波性能。因此,如何在顯著節(jié)能的同時(shí)保證濾波器性能是筆者研究的主要?jiǎng)訖C(jī),據(jù)筆者所知,到目前為止,受DCTM約束的濾波問(wèn)題還沒(méi)有引起學(xué)者們的關(guān)注。
為了順利開展后續(xù)研究工作,現(xiàn)給出DCTM下的測(cè)量輸出模型。考慮某實(shí)際工程中的無(wú)線通信網(wǎng)絡(luò),根據(jù)其中無(wú)線傳感器的空間分布,假設(shè)這些傳感器被分為M個(gè)節(jié)點(diǎn),那么DCTM下的測(cè)量輸出為:
?劬[y,y,…,y]
其中,為經(jīng)過(guò)網(wǎng)絡(luò)傳輸后的第i(i=1,2,…,M)個(gè)傳感器節(jié)點(diǎn)在k時(shí)刻的測(cè)量輸出。y?劬[y,
y,…,y]T為傳輸前的測(cè)量輸出,其中y代表第i(i=1,2,…,M)個(gè)傳感器節(jié)點(diǎn)在k時(shí)刻的測(cè)量輸出。在DCTM下,當(dāng)?shù)趇個(gè)傳感器在k時(shí)刻處于休眠狀態(tài)時(shí),測(cè)量輸出y將不會(huì)被傳輸。則的更新規(guī)則描述如下[21]:
=Λy(6)
Λ?劬diag{λ},i=1,2,…,M
λ=1,≤d,?坌k≥00,?搖其他(7)
這里,λ表征了第i個(gè)傳感器節(jié)點(diǎn)的休眠/激活狀態(tài),λ=1表明傳感器節(jié)點(diǎn)i在k時(shí)刻處于激活狀態(tài),λ=0則表明傳感器節(jié)點(diǎn)i在k時(shí)刻處于休眠狀態(tài)。T與d分別為DCTM下第i個(gè)傳感器節(jié)點(diǎn)的休眠/激活周期與占空比。
根據(jù)占空比的定義有:
d=(8)
其中,T為第i個(gè)傳感器節(jié)點(diǎn)在一個(gè)周期T內(nèi)的激活時(shí)間。
注1 傳感器節(jié)點(diǎn)i是否處于激活或休眠狀態(tài),利用式(7)、(8)即可確定:如果mod(k,T)≤dT,
則表明第i個(gè)傳感器節(jié)點(diǎn)在k(k≥0)時(shí)刻處于激活狀態(tài),傳感器傳輸數(shù)據(jù),有λ=1,此時(shí)=y;否則,節(jié)點(diǎn)i處于休眠狀態(tài),不傳輸數(shù)據(jù),有λ=0,此時(shí)=0。
1.3 占空比機(jī)制下濾波方案設(shè)計(jì)
1.3.1 基于預(yù)測(cè)的濾波方案
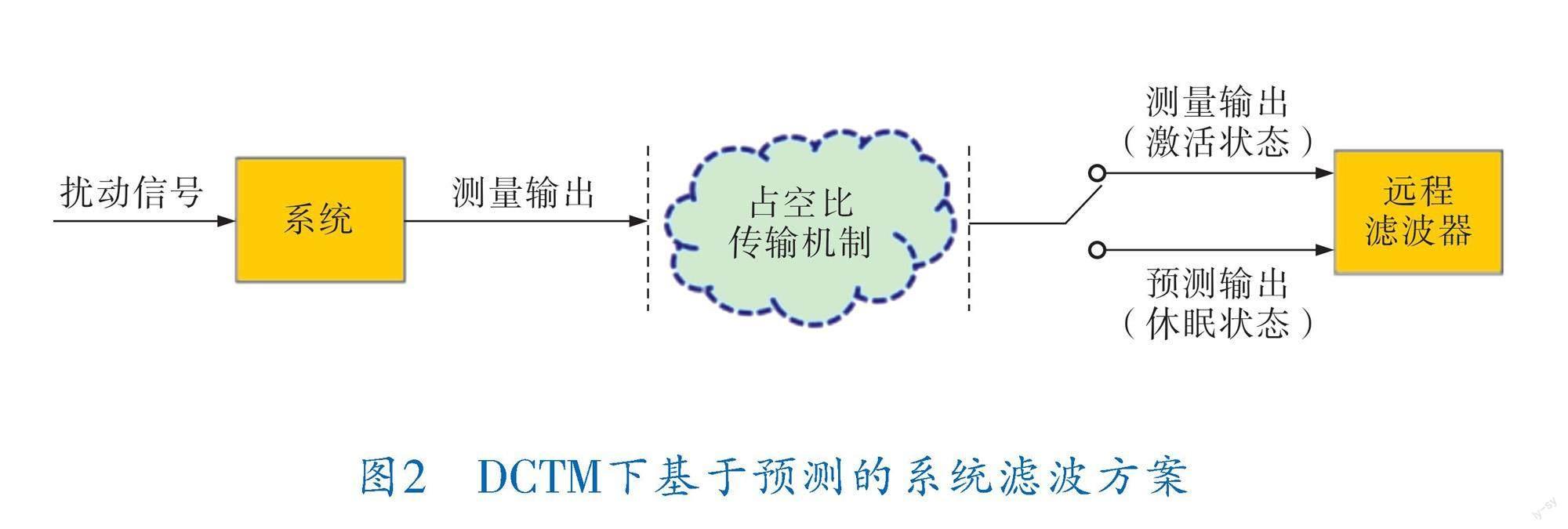
對(duì)于測(cè)量信息不完整的問(wèn)題,傳統(tǒng)解決辦法是在濾波或狀態(tài)估計(jì)中采用零階保持(Zero-Order Holder,ZOH)策略,但該方法對(duì)于本研究的情況不可行。主要原因是,DCTM下每個(gè)周期內(nèi)的休眠時(shí)間都較長(zhǎng),如果使用ZOH方法處理未發(fā)送數(shù)據(jù),則濾波器端接收到的數(shù)據(jù)將在相對(duì)較長(zhǎng)時(shí)間內(nèi)保持不變,顯然這相當(dāng)于人為主動(dòng)向系統(tǒng)引入了一個(gè)較大的時(shí)間延遲,眾所周知,大時(shí)滯將嚴(yán)重惡化系統(tǒng)的性能,甚至導(dǎo)致系統(tǒng)不穩(wěn)定;另一方面,幾乎所有的估計(jì)方法都主要依賴測(cè)量結(jié)果,如果測(cè)量數(shù)據(jù)不準(zhǔn)確或不足甚至稀少,將會(huì)影響系統(tǒng)的整體性能。因此,要解決接收數(shù)據(jù)明顯減少甚至稀疏時(shí)仍然保證濾波性能的問(wèn)題,亟需尋找新的方案。
為應(yīng)對(duì)上述挑戰(zhàn),筆者提出了一種基于預(yù)測(cè)的系統(tǒng)濾波方案,用相應(yīng)的預(yù)測(cè)值代替未發(fā)送數(shù)據(jù),以提高待處理數(shù)據(jù)的完整性和準(zhǔn)確性。當(dāng)傳感器發(fā)送數(shù)據(jù)時(shí),遠(yuǎn)程濾波器端應(yīng)用測(cè)量輸出數(shù)據(jù)進(jìn)行濾波;當(dāng)傳感器不發(fā)送數(shù)據(jù)時(shí),遠(yuǎn)程濾波器端利用預(yù)測(cè)數(shù)據(jù)進(jìn)行濾波,具體方案如圖2所示。
1.3.2 預(yù)測(cè)方法選擇
1.3.1節(jié)中已經(jīng)給出了基于預(yù)測(cè)的濾波方案設(shè)計(jì)思想。然而,必須要考慮到的是,預(yù)測(cè)方法的引入可能會(huì)增加方案的復(fù)雜度,不利于工程實(shí)施,也即并不是任何一種預(yù)測(cè)方法在DCTM下都是可行的,如滾動(dòng)時(shí)域估計(jì)方法或模型預(yù)測(cè)方法,由于需要利用大量歷史數(shù)據(jù)并進(jìn)行大量計(jì)算,不僅能耗顯著增大還會(huì)減慢在線計(jì)算速度,因此不適用于DCTM下的預(yù)測(cè);又如人工神經(jīng)網(wǎng)絡(luò)、深度學(xué)習(xí)等機(jī)器學(xué)習(xí)算法,也不適用于解決上面的問(wèn)題,主要原因是硬件配置需要滿足較高的要求而且算法實(shí)現(xiàn)將造成巨大的計(jì)算負(fù)擔(dān)。
上述問(wèn)題的存在都可能導(dǎo)致節(jié)點(diǎn)能耗驟增,顯然,這與節(jié)能設(shè)計(jì)意圖相背,而且成本明顯增加。
綜合上述討論,本研究的主要目的是設(shè)計(jì)一種實(shí)用并有效的濾波方案,能夠在保持低能耗的同時(shí)盡量提高濾波性能。考慮到對(duì)稀疏數(shù)據(jù)處理能力及節(jié)能性的較高要求,本研究采用協(xié)同預(yù)測(cè)(Collaborative Prediction,CP)方法預(yù)測(cè)傳感器未發(fā)送的數(shù)據(jù)。協(xié)同預(yù)測(cè)方法的主要優(yōu)勢(shì)在于,稀疏數(shù)據(jù)情況下具有良好的預(yù)測(cè)效果,對(duì)硬件設(shè)備性能要求不高、算法復(fù)雜度不高且能耗低。
1.4 協(xié)同預(yù)測(cè)算法
1.4.1 協(xié)同預(yù)測(cè)算法選擇
目前,協(xié)同預(yù)測(cè)算法主要應(yīng)用于推薦系統(tǒng)中,被認(rèn)為是現(xiàn)有推薦預(yù)測(cè)方法中最成功的方法之一[22]。協(xié)同預(yù)測(cè)算法之所以獲得成功應(yīng)用,主要在于其在高度稀疏數(shù)據(jù)的預(yù)測(cè)中具有明顯的優(yōu)勢(shì)[23],并且算法簡(jiǎn)單、效率高。這激發(fā)了筆者考慮采用該方法解決DCTM下由于稀疏數(shù)據(jù)引起的濾波性能下降的問(wèn)題。
在幾種常用的協(xié)同預(yù)測(cè)算法中,目前最基本和普及的一種是基于鄰域的協(xié)同預(yù)測(cè)方法,其核心思想是:以統(tǒng)計(jì)技術(shù)為基礎(chǔ),尋找具有相同或相似結(jié)果的目標(biāo)用戶[22~24];然后,根據(jù)鄰域用戶的評(píng)分來(lái)預(yù)測(cè)目標(biāo)用戶的評(píng)分;最后,向目標(biāo)用戶推薦預(yù)測(cè)評(píng)分最高的前N項(xiàng)(其中,N為推薦數(shù))[25]。一般而言,基于鄰域的CP方法分為兩類,即基于用戶的算法(User-Based Algorithm,UBA)和基于項(xiàng)目的算法(Item-Based Algorithm,IBA),分別根據(jù)相似用戶和相似項(xiàng)目的評(píng)分來(lái)預(yù)測(cè)目標(biāo)用戶的評(píng)分。在推薦系統(tǒng)中,所謂“項(xiàng)目”是指系統(tǒng)通過(guò)預(yù)測(cè)向用戶推薦的具體內(nèi)容條目。與UBA相比,IBA在實(shí)時(shí)性和處理稀疏數(shù)據(jù)方面具有明顯的優(yōu)勢(shì)[26],這促使筆者考慮將IBA應(yīng)用于DCTM下系統(tǒng)的遞推濾波問(wèn)題研究中。
1.4.2 基于項(xiàng)目的協(xié)同預(yù)測(cè)算法
筆者采用基于項(xiàng)目的協(xié)同預(yù)測(cè)算法來(lái)預(yù)測(cè)DCTM機(jī)制下的未發(fā)送數(shù)據(jù),設(shè)計(jì)輸入為用戶u對(duì)項(xiàng)目l和項(xiàng)目j的評(píng)分r和r,輸出為目標(biāo)用戶u對(duì)項(xiàng)目l的預(yù)測(cè)評(píng)分,該方法具體預(yù)測(cè)過(guò)程[24]如下:
a. 根據(jù)r和r,通過(guò)式(9)計(jì)算項(xiàng)目l和j之間的相似度Sim;
b. 通過(guò)Top-N方法找到與第l個(gè)項(xiàng)目相似的最近鄰;
c. 利用式(10),根據(jù)第l個(gè)項(xiàng)目的最近鄰計(jì)算目標(biāo)用戶的預(yù)測(cè)評(píng)分。
IBA的主要思想是根據(jù)用戶-項(xiàng)目評(píng)分尋找項(xiàng)目的最近鄰,從而獲得目標(biāo)用戶的推薦預(yù)測(cè)。而獲取項(xiàng)目最近鄰的常用方法是計(jì)算項(xiàng)目間的相似度。筆者采用皮爾遜系數(shù)計(jì)算相似度,其定義如下[24]:
Sim=(9)
其中,Sim表示項(xiàng)目l和項(xiàng)目j之間的相似度,從式(9)可知,Sim∈[-1,1];U是項(xiàng)目l和j都具有評(píng)分的用戶集合;和分別是U中的用戶對(duì)項(xiàng)目l和項(xiàng)目j評(píng)分的平均值。
獲得Sim后,采用Top-N方法尋找與第l個(gè)項(xiàng)目相似的鄰域,即項(xiàng)目l的最近鄰。最后,根據(jù)最近鄰計(jì)算目標(biāo)用戶對(duì)第l個(gè)項(xiàng)目的預(yù)測(cè),具體公式如下:
=+(10)
其中,為目標(biāo)用戶u對(duì)項(xiàng)目l的預(yù)測(cè)評(píng)分;r為目標(biāo)用戶u對(duì)項(xiàng)目j的評(píng)分;O表示項(xiàng)目j的最近鄰集合。
以上即為數(shù)據(jù)稀疏情況下基于項(xiàng)目的協(xié)同預(yù)測(cè)算法過(guò)程,該方法計(jì)算簡(jiǎn)單易實(shí)現(xiàn),已成功應(yīng)用于包括亞馬遜網(wǎng)絡(luò)平臺(tái)在內(nèi)的諸多在線系統(tǒng)中。
受協(xié)同預(yù)測(cè)方法成功應(yīng)用的啟發(fā),筆者考慮采用該方法來(lái)預(yù)測(cè)未發(fā)送的輸出數(shù)據(jù)。下面就給出具體的基于協(xié)同預(yù)測(cè)的濾波器設(shè)計(jì)算法。
2 占空比機(jī)制下遞推濾波算法設(shè)計(jì)
首先,給出將用到的3個(gè)引理。
引理1[27] 對(duì)于任意兩個(gè)向量a,b∈R,有下面的不等式成立:
ab+ba≤ρa(bǔ)a+ρbb(11)
其中,ρ為一個(gè)常數(shù),ρ>0。
引理2 對(duì)于任意一個(gè)矩陣L,若LL≤I,則有下面的不等式成立:
LML≤tr{M}I(12)
其中,M為已知適維方陣;tr{M}代表矩陣M的跡。
證明 已知下式成立:
LML≤tr{LML}I(13)
又知:
tr{LML}I=tr{MLL}I≤tr{M}I(14)
結(jié)合式(13)、(14),可推得:
LML≤tr{M}I
引理得證。
引理3[28] 對(duì)于時(shí)刻0≤k≤n,假定矩陣X與矩陣函數(shù)A(X)、B(X)滿足X=X>0,A(X)=
A(X)∈R,B(X)=B(X)∈R。如果存在矩陣C=C<X使得:
A(X)≥A(C)B(X)≥A(X)(15)
那么,下列差分方程的解R及S滿足R≤S:
R=A(R)S=B(S)R=S>0(16)
其中,R、S為差分方程解的初值。
2.1 構(gòu)建遞推濾波器
令表示對(duì)k時(shí)刻未發(fā)送輸出數(shù)據(jù)的預(yù)測(cè),即有:
y?劬[y,y,…,y]??? (17)
其中,為k時(shí)刻第i(i=1,2,…,M)個(gè)傳感器節(jié)點(diǎn)因休眠而未被發(fā)送的測(cè)量輸出的預(yù)測(cè)值。
根據(jù)前述內(nèi)容可知的計(jì)算式如下:
=Y+(18)
其中,Ω表示與k時(shí)刻測(cè)量輸出相似的最近鄰集合;y為z時(shí)刻第i個(gè)傳感器節(jié)點(diǎn)的測(cè)量輸出;與分別為k時(shí)刻與z時(shí)刻測(cè)量輸出的平均值;Sim為k時(shí)刻與z時(shí)刻測(cè)量輸出的相似度。
Sim的計(jì)算式如下:
Sim=(19)
這里,Ω為在z時(shí)刻和k時(shí)刻發(fā)送數(shù)據(jù)的傳感器節(jié)點(diǎn)集合;y及y分別為第j個(gè)傳感器節(jié)點(diǎn)在z時(shí)刻和k時(shí)刻發(fā)送的測(cè)量輸出。
基于式(6)~(8)和(18),定義濾波器端接收到的測(cè)量輸出為:
y=Λy+(I-Λ)(20)
則構(gòu)造如下結(jié)構(gòu)的濾波器:
=A=+K×(-ΛC)(21)
其中,和分別為狀態(tài)x在k時(shí)刻的估計(jì)及一步預(yù)測(cè)。
2.2 基于協(xié)同預(yù)測(cè)的遞推濾波算法
定理1 針對(duì)一類時(shí)變不確定系統(tǒng)(1),其一步預(yù)測(cè)誤差協(xié)方差矩陣P與濾波誤差協(xié)方差矩陣P分別為:
其中,E{}代表計(jì)算矩陣的期望。
證明 根據(jù)式(8)與式(4),有:
e=x-
=(A+UkVkWk)e+UkVkWk+Bω(24)
其中,e為k時(shí)刻狀態(tài)的濾波誤差;e為k時(shí)刻對(duì)k+1時(shí)刻狀態(tài)的一步預(yù)測(cè)誤差。
由式(24)易求得一步預(yù)測(cè)誤差協(xié)方差矩陣
P(式(22))。
又根據(jù)式(1)、式(20)及式(4),可求得濾波誤差e如下:
由此,可推得濾波誤差協(xié)方差矩陣P(同式(23))。
定理得證。
注2 由于考慮了不確定性,從式(22)可以看到,一步預(yù)測(cè)誤差協(xié)方差矩陣P包含有不確定項(xiàng)。這種情況下,若要求取濾波誤差協(xié)方差矩陣P的精確值幾乎是不可能的,而這恰恰將導(dǎo)致無(wú)法計(jì)算濾波器增益K。為了解決這個(gè)問(wèn)題,采用求取P的一個(gè)上界,然后通過(guò)最小化這個(gè)上界的跡來(lái)計(jì)算K的辦法。
以下定理2計(jì)算了濾波誤差協(xié)方差矩陣P的一個(gè)上界,并最小化此上界的跡,從而計(jì)算濾波器增益K。
定理2 考慮式(22)、(23)給出的一步預(yù)測(cè)誤差協(xié)方差矩陣P及濾波誤差協(xié)方差矩陣
P。令ρ及ρ為正標(biāo)量,初始條件滿足P≤
Ψ的兩個(gè)遞推矩陣方程為:
有正定解Ψ及Ψ,那么Ψ是P的一個(gè)上界,Ψ是P的一個(gè)上界,即:
P≤ΨP≤Ψ (28)
進(jìn)而,濾波器的增益矩陣為:
K=ΨCΛΘ(29)
Θ=ΛCΨCΛ+ΛQΛ+
(I-Λ)×(I-Λ)(30)
證明 本定理應(yīng)用數(shù)學(xué)歸納法證明。考慮初始條件P≤Ψ,并假設(shè)P≤Ψ。接下來(lái),證明k+1時(shí)刻成立。
首先,對(duì)于式(22)中右側(cè)的項(xiàng),利用引理1,有:
然后,根據(jù)式(31)重新整理式(22),可得:
P≤(1+ρ)×E{(A+UkVkWk)P(A+UkVkWk)}+
(1+ρ)E{UkVkWk(UkVkWk)}+BQB(32)
將引理1、2應(yīng)用于式(32)中右側(cè)第1個(gè)期望項(xiàng),有:
E{(A+UkVkWk)P(A+UkVkWk)}≤(1+ρ)APA+(1+ρ)·
tr{WPW}UU(33)
應(yīng)用引理2于式(32)中右側(cè)第2個(gè)期望項(xiàng),有:
E{UkVkWk(UkVkWk)}≤tr{WW}UU(34)
將式(33)、(34)代入式(32)中,可推得:
則根據(jù)引理3,式(26)成立。
對(duì)于濾波誤差協(xié)方差矩陣(23),由不等式(35)及引理3,初始條件P≤Ψ及假設(shè)P≤Ψ,易推得式(27)成立。
接下來(lái)求取Ψ的跡相對(duì)于K的偏導(dǎo)數(shù),并令其為0,則有:
=-2ΨCΛ+2KΛQΛ+
2KΛCΨCΛ+
2K(I-Λ)(I-Λ)=0(36)
基于Θ的可逆性,可求得如式(29)所示的濾波器增益K。
定理得證。
下面將分析討論此上界Ψ的有界性。
3 有界性分析
假設(shè)1 存在正標(biāo)量q、q、a、a、b、b、c、c、u、u、w及w,使得對(duì)于任意時(shí)刻k,有:
q≤‖Q‖≤q
a≤‖A‖≤a
b≤‖B‖≤b
c≤‖C‖≤c
u≤‖U‖≤u
w≤‖W‖≤w
定理1 考慮具有濾波器(4)的時(shí)變系統(tǒng)(1),濾波誤差協(xié)方差矩陣的上界Ψ有界,其界如下:
Ψ≤?綴tr{Ψ}+?綴?綴I(37)
Ψ≤Ψ(38)
?綴=(1+ρ)(1+ρ)a+(1+ρ)(1+ρ)wu
?綴=(1+ρ)wud+bq
d?劬sup(tr{}),?坌k≥0
證明 根據(jù)式(26)及假設(shè)1有:
Ψ≤(1+ρ)(1+ρ)atr{Ψ}I+(1+ρ)(1+
ρ)wutr{Ψ}I+(1+ρ)wutr{}I+bqI(39)
對(duì)于式(39)中的項(xiàng)tr{}根據(jù)濾波器(4)的預(yù)測(cè)步驟及式(1)知,可實(shí)現(xiàn)狀態(tài)的無(wú)偏估計(jì),則tr{}項(xiàng)有界,考慮到的半正定性,設(shè)tr{}的上界為d(d≥0),即:
0≤tr{}≤d,?坌k≥0,d≥0(40)
整理式(39),得:
Ψ≤(?綴tr{Ψ}+?綴)I(41)
將式(29)代入式(27),有:
Ψ=Ψ-ΨCΛΘΛCΨ≤Ψ(42)
結(jié)合式(41)、(42),并考慮Ψ與Ψ的正定性,可推得:
Ψ≤(?綴tr{Ψ}+?綴)I≤?綴tr{Ψ}+?綴?綴I(43)
定理得證。
4 仿真驗(yàn)證
考慮不確定時(shí)變系統(tǒng)(1),其參數(shù)如下:
A=0.6sin(3k)?搖?搖 0.70.7cos(k)?搖?搖 -0.3
B=[0.1?搖 0.2]T
C=10?搖 ?搖95?搖?搖 11
測(cè)量噪聲v與過(guò)程噪聲ω為零均值白噪聲,其協(xié)方差分別為Q=0.5I和Q=diag{0.8,0.6},初始狀態(tài)x=[0.05?搖?搖0.1]T。
考慮測(cè)量值通過(guò)基于占空比機(jī)制的無(wú)線網(wǎng)絡(luò)進(jìn)行傳輸?shù)那闆r,觀察不同情況下的濾波效果。
不失一般性,假設(shè)有兩個(gè)傳感器節(jié)點(diǎn)。首先,觀察當(dāng)V=0.2sin(5k),激活時(shí)間和周期時(shí)間分別為T=0.9 s、T=0.55 s和T=1 s、T=0.6 s,即占空比d=d=0.9時(shí)的濾波效果,如圖3、4所示,可以看出,由于占空比傳輸機(jī)制的引入,常規(guī)基于ZOH方法的濾波性能嚴(yán)重下降,顯然已不適用于本研究考慮的情況。為提高濾波性能,考慮采用設(shè)計(jì)的基于協(xié)同預(yù)測(cè)的遞推濾波算法實(shí)現(xiàn)有效的狀態(tài)估計(jì),在上述參數(shù)下的濾波效果如圖5、6所示。對(duì)比圖3、4可以看出,筆者方法獲得了更好的濾波效果。
圖3 基于ZOH的實(shí)際狀態(tài)x及其估計(jì)
(d=d=0.9)
圖4 基于ZOH的實(shí)際狀態(tài)x及其估計(jì)
(d=d=0.9)
圖5 基于協(xié)同預(yù)測(cè)的實(shí)際狀態(tài)x及其估計(jì)
(d=d=0.9)
圖6 基于協(xié)同預(yù)測(cè)的實(shí)際狀態(tài)x及其估計(jì)
(d=d=0.9)
接下來(lái),為進(jìn)一步展示筆者設(shè)計(jì)濾波方法的良好性能,考慮加大不確定性V的振幅與變化頻率,并增大節(jié)能程度(即減小占空比),進(jìn)行仿真驗(yàn)證。設(shè)V=0.9sin(100k),激活時(shí)間和周期時(shí)間分別為T=0.6 s、T=0.49 s和T=1 s、T=0.6 s。相應(yīng)地,占空比分別為d=0.6和d=0.8,濾波效果如圖7、8所示,可以看出,筆者提出的濾波方案在上述較大不確定性及較小占空比情況下依然獲得了令人滿意的濾波效果。
圖7 基于協(xié)同預(yù)測(cè)的實(shí)際狀態(tài)x及其估計(jì)
(d=0.6,d=0.8)
圖8 基于協(xié)同預(yù)測(cè)的實(shí)際狀態(tài)x及其估計(jì)
(d=0.6,d=0.8)
上述仿真結(jié)果表明,結(jié)合協(xié)同預(yù)測(cè)的遞推濾波方案,實(shí)現(xiàn)了在測(cè)量數(shù)據(jù)稀少及系統(tǒng)存在不確定性情況下的狀態(tài)估計(jì),與常規(guī)ZOH方法相比,所提方法明顯提高了占空比機(jī)制下系統(tǒng)的濾波性能。
5 結(jié)束語(yǔ)
本研究以時(shí)變不確定系統(tǒng)為對(duì)象,結(jié)合協(xié)同預(yù)測(cè)方法設(shè)計(jì)了新穎高效的遞推濾波算法。通過(guò)最小化濾波誤差協(xié)方差矩陣上界的跡計(jì)算出了濾波器的增益,討論了濾波誤差協(xié)方差矩陣上界的有界性,并通過(guò)仿真驗(yàn)證了所提濾波算法的有效性,以及測(cè)量數(shù)據(jù)稀少時(shí)能夠較好地實(shí)現(xiàn)對(duì)系統(tǒng)狀態(tài)的準(zhǔn)確估計(jì)。
筆者設(shè)計(jì)的濾波方法可用于工程現(xiàn)場(chǎng)節(jié)能需求大、環(huán)境條件苛刻、傳輸不穩(wěn)定,但對(duì)監(jiān)測(cè)數(shù)據(jù)準(zhǔn)確性要求較高的場(chǎng)合,算法能夠在上述情況下實(shí)現(xiàn)系統(tǒng)狀態(tài)的準(zhǔn)確估計(jì),并具有良好的濾波性能,研究成果在理論和工程方面都具有較強(qiáng)的應(yīng)用價(jià)值。
參 考 文 獻(xiàn)
[1] CONG G,HAN F,LI J H,et al.Event-triggered distributed filtering for discrete-time systems with integral measurements,challenges and prospects[J].Systems Science & Control Engineering,2021,9(1):272-282.
[2]?? WANG L C,LIU S,ZHANG Y H,et al.Non-fragile l2-l∞ state estimation for time-delayed artificial neural networks:An adaptive eventtriggered approach[J].International Journal of Systems Science,2022,53(10):2247-2259.
[3]?? GAO H Y,DONG H L,WANG Z D,et al.An event-triggering approach to recursive filtering for complex networks with state saturations and random coupling strengths[J].IEEE Transactions on Neural Networks and Learning Systems,2020,31(10):4279-4289.
[4]?? WEN P,LI X,HOU N,et al.Distributed recursive fault estimation with binary encoding schemes over sensor networks[J].Systems Science & Control Engineering,2022(10):417-427.
[5]?? 左信,陳志鵬,岳元龍.基于改進(jìn)雙卡爾曼濾波法的儲(chǔ)能電池SOH估計(jì)[J].化工自動(dòng)化及儀表,2022,49(5):590-598.
[6]?? JIANG B,GAO H Y,HAN F,et al.Recursive filtering for nonlinear systems subject to measurement outliers[J].Science China Information Sciences,2021,64(7):172206.
[7]?? LI J H,LIU H J,HAN F.Sampled-data non-fragile state estimation for delayed genetic regulatory netwo-
rks under stochastically switching sampling periods[J].Neurocomputing,2021,463:168-176.
[8]?? YANG J J,MA L F,CHEN Y G,et al.l2-l∞ state estimation for continuous stochastic delayed neural networks via memory event-triggering strategy[J].International Journal of Systems Science,2022,53(13):272-282.
[9]?? YAO F,DING Y L,HONG S G,et al.A survey on evolved LoRa-based communication technologies for emerging internet of things applications[J].International Journal of Network Dynamics and Intelligence,2022,1(1):4-19.
[10]?? 李艷輝,張國(guó)旭.雙端事件觸發(fā)機(jī)制下離散不確定Markov跳變系統(tǒng)動(dòng)態(tài)輸出反饋H∞控制[J].化工自動(dòng)化及儀表,2022,49(6):686-692.
[11]?? LIU Y R,WANG Z D,YUAN Y,et al.Event-triggered partial-nodes-based state estimation for delayed complex networks with bounded distributed delays[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2019,46(6):1088-1098.
[12]?? 高宏宇,張曼容,姜博,等.基于動(dòng)態(tài)事件觸發(fā)的狀態(tài)飽和復(fù)雜網(wǎng)絡(luò)遞推濾波[J].控制與決策,2022,37(2):401-408.
[13]?? WANG X L, SUN Y, DING D R. Adaptive dynamic programming for networked control systems under communication constraints:A survey of trends and techniques[J].International Journal of Network Dynamics and Intelligence,2022,1(1):85-98.
[14]? SHEN B,WANG Z D,WANG D,et al.Distributed state-saturated recursive filtering over sensor networks under Round-Robin protocol[J].IEEE Transactions on Cybernetics,2020,50(8):3605-3615.
[15]?? ZOU L,WANG Z D,HAN Q L,et al.Recursive filtering for time-varying systems with random access protocol[J].IEEE Transactions on Automatic Control,2019,64(2):720-727.
[16]?? HU J,LI J X,KAO Y G,et al.Optimal distributed filtering for nonlinear saturated systems with random access protocol and missing measurements:The uncertain probabilities case[J]. Applied Mathematics and Computation,2022,418:126844.
[17]?? LIU Y R,ARUMUGAM A,RATHINASAMY S,et al.Event-triggered non-fragile finite-time guaranteed co-
st control for uncertain switched nonlinear networked systems[J].Nonlinear Analysis:Hybrid Systems,2020,
36:100884.
[18]?? LIU Z T,LIN W Y,YU X H,et al.Approximation-free robust synchronization control for dual-linear-motors-driven systems with uncertainties and disturbances[J].IEEE Transactions on Industrial Electronics,2022,69(10):10500-10509.
[19]?? ALSAADI F E,LIU Y R,ALHARBI N S.Design of robust H∞ state estimator for delayed polytopic unc-
ertain genetic regulatory networks:Dealing with finite-time boundedness[J].Neurocomputing,2022,
49:170-181.
[20]?? TAN H L,SHEN B,PENG K X,et al.Robust recursive filtering for uncertain stochastic systems with amplify-and-forward relays[J].International Journal of Systems Science:The Theory and Practice of Mathematical Modelling,Simulation,Optimization and Control in Relation to Biological,Economic,Industrial and Transportation Systems,2020,51(5/8):1188-1199.
[21]?? GAO H Y,HAN F,JIANG B,et al.Recursive filtering for time-varying systems under duty cycle scheduling based on collaborative prediction[J].Journal of the Franklin Institute,2020,357(17):13189-13204.
[22]?? HEMA P,PILLAI N S.Efficient mining and recommendation of sparse data through collaborative filtering technique in medical transcriptions[C]//International Conference on Information Communication and Embedded Systems.Chennai,Tamil Nadu,India:S A Engineering College,2014:27-28.
[23]?? SU X Y,KHOSHGOFTAAR T M.A survey of collaborative filtering techniques[J].Advances in Artificial Intelligence,2009:421425-1-421425-19.
[24]?? XU J C,LIU A F,XIONG N X,et al.Integrated collaborative filtering recommendation in social cyber-physical systems[J].International Journal of Distributed Sensor Networks,2017,13(12):1-17.
[25]?? HOU M W,WEI R,WANG T G,et al.Reliable medical recommendation based on privacy-preserving collaborative filtering[J].Computers Materials & Continua,2018,56(1):137-149.
[26]?? 孔維梁.協(xié)同過(guò)濾推薦系統(tǒng)關(guān)鍵問(wèn)題研究[D].武漢:華中師范大學(xué),2013.
[27]?? LI W L,SUN J,JIA Y M,et al.Variance-constrained state estimation for nonlinear complex networks with uncertain coupling strength[J].Digital Signal Processing,2017,67:107-115.
[28]? WANG L C,WANG Z D,HUANG T W,et al.An event-triggered approach to state estimation for a class of complex networks with mixed time delays and nonlinearities[J].IEEE Transactions on Cybernetics,2016,46(11):2497-2508.
(收稿日期:2023-02-14,修回日期:2023-12-30)
Collaborative Prediction-based Recursive Filtering for Time-varying
Uncertain System under Duty Cycle Transmission Mechanism
GAO Hong-yua,b, YU Lin-donga,b, HU Yin-gea,b, LI Yuea,b, HOU Nanb
(a. School of Electrical and Information Engineering; b. Artificial Intelligence Energy Research Institute,
Northeast Petroleum University)
Abstract?? In this paper, having the industrial Internet based to investigate the recursive filtering for time-varying uncertain systems under the duty cycle transmission mechanism was implemented, including designing a novel recursive filtering algorithm which combined with the collaborative prediction method so as to solve filtering performance degradation under the duty cycle mechanism. In addition, the model of the duty cycle transmission mechanism was presented and the recursive filtering scheme combined with the collaborative prediction method was proposed, including designing a recursive filtering algorithm based on the duty cycle mechanism, deducing an upper bound of the filtering error covariance matrix, analyzing the boundness of this upper bound and the purpose of improving the filtering performance in the sparse data case. Finally, a simulation example was provided to illustrate effectiveness of the proposed algorithm.
Key words?? recursive filtering, transmission mechanism, duty ratio, collaborative prediction, time-varying uncertain system, sparse data, project-based algorithm