保持架兜孔形狀對高速角接觸球軸承保持架動態性能的影響分析
2024-04-20 09:02:38陳世金鄒冬良王亞坤蔡東明
振動與沖擊 2024年7期
陳世金, 鄒冬良, 王亞坤, 蔡東明
(五冶集團上海有限公司,上海 201900)
高速角接觸球軸承廣泛應用于航空發動機主軸、航天慣性儀表、新能源汽車主軸以及高速精密機床主軸等高速轉子系統中,軸承性能以及壽命往往決定著系統能否正常運行,而保持架的動態特性是保證高速球軸承性能的關鍵。保持架不穩定運動不僅會使軸承力矩波動,產生嘯叫聲,還會加劇保持架磨損,甚至使其斷裂,從而引起軸承精度喪失或使軸承卡死造成災難性后果[1]。Kingsbury[2]第一次通過試驗發現了保持架不穩定運動與軸承力矩波動之間的關系,認為軸承鋼球與保持架兜孔之間的摩擦力驅動保持架渦動,保持架的不穩定渦動導致軸承摩擦力矩波動并產生嘯叫聲。Walters[3]最早建立了球4自由度、保持架6自由度的球軸承動力學模型,奠定了滾動軸承保持架動力學分析的基礎。Gupta[4-8]建立了所有零件具有6自由度的滾動軸承完全動力學模型,可以模擬時變工況下軸承零件的瞬態運動特性,并系統分析了工況、潤滑、摩擦以及幾何等因素對保持架穩定性的影響。國內基于滾動軸承動力學模型的保持架動態特性研究近10年有了較快發展,Liu等[9-14]以Gupta動力學模型為基礎針對各自工況進行一定簡化,對保持架的動態性能分析提供了諸多有益探討。分析指出,保持架兜孔間隙和引導間隙等是影響保持架動力學性能的重要參數,然而上述學者大多針對的是單一的圓柱形兜孔保持架,保持架兜孔形狀作為對保持架結構影響更大的參數反而未被深入探究。此外,由于動力學模型較復雜,國內學者大多采用集成較多內部函數的Matlab語言進行程序開發,以降低程序開發難度,但是由于Matlab語言計算效率較低,程序運行耗時非常長,給出的結果中保持架甚至未進入穩定運行階段(仿真軸承運行時間不到0.1 s)。Sathyan等[15]通過試驗探究發現方形兜孔保持架摩擦力矩的穩定性數倍優于圓柱形兜孔保持架。鄧四二等[16]利用能量守恒定律,建立角接觸球軸承摩擦力矩理論計算公式,發現低速時方形兜孔保持架有利于軸承摩擦力矩的降低,反之則是圓柱形更有利。Yan等[17]建立了球6自由度、內圈5自由度和保持架3自由度的球軸承擬動力學模型,分析了球兜孔和圓柱兜孔對軸承溫度的影響,結果表明球形兜孔保持架更利于軸承的散熱。
綜上所述,眾多學者對保持架動力學特性探究做了諸多探索,但主要集中在工況、潤滑、摩擦、兜孔間隙和引導間隙等方面,對保持架結構影響非常大的兜孔形狀則較少涉及。而工程人員發現在某軸承中采用圓柱兜孔保持架時會產生嘯叫聲,而改換成方形兜孔保持架后嘯叫聲會減弱甚至消失。Sathyan等和鄧四二等的研究表明兜孔形狀對軸承摩擦力矩以及散熱有較大影響,但由于未建立完全動力學模型,缺乏對保持架的動力學特性分析,且僅對某兩種兜孔形狀進行探討,缺乏對不同保持架兜孔形狀的綜合討論。陳世金等[18]試驗探究了不同兜孔形狀對軸承保持架質心軌跡和打滑率的影響規律,發現兜孔形狀對保持架運動影響顯著,但對其內在作用機理缺乏足夠分析。本文在上述試驗研究工作的基礎上,以高速角接觸球軸承為研究對象,分別建立方柱形(方形)兜孔、圓柱形(圓形)兜孔以及球形兜孔保持架的球軸承動力學數值仿真模型,并采用Fortran語言進行程序開發,大幅提高計算效率,分析軸承運行2 s內不同兜孔形狀以及間隙比對保持架運動、受力以及磨損的影響,探究兜孔形狀對保持架運動的作用機理,并以試驗分別對三種兜孔保持架的動力學模型加以驗證。
1 模型建立
本文基于課題組建立的高速儀表轉子軸承動力學磨損數值仿真模型,建立了方形、圓柱形和球形保持架動力學模型,球和不同兜孔形狀保持架的相互作用及保持架與引導套圈的相互作用介紹如下,球和內外圈的相互作用可以參考Zhang等。
1.1 坐標系與變換
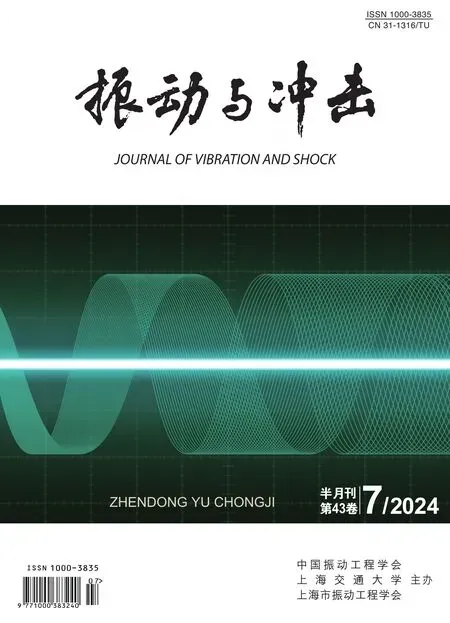
假定軸承各零件幾何中心與質心重合,軸承各坐標系中心建立在零件幾何中心上,各零件的質心運動在慣性坐標系中描述,繞質心的轉動在其定體坐標系。軸承各零件坐標系的定義如圖1所示。
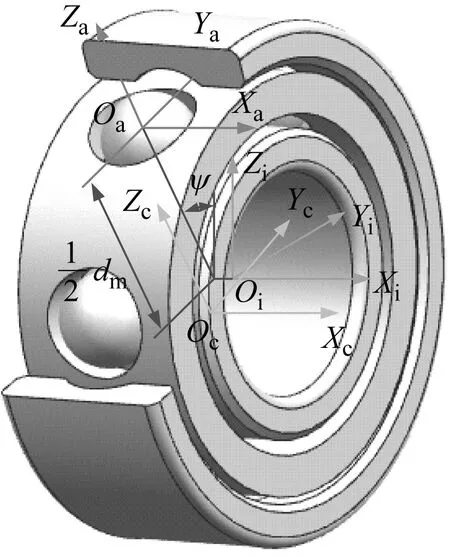
圖1 軸承各零件坐標系定義Fig.1 Definition of coordinate system
從一個坐標系到另一個坐標系的轉換可以通過三次相繼的旋轉實現,轉換矩陣是
(1)
零件在定體坐標系中的角速度與三次旋轉的角度(η,ξ,λ)之間的關系為[19]
(2)
式中,(ω1,ω2,ω3)為軸承零件在定體坐標系中的角速度分量。
1.2 保持架的運動方程
保持架在空間中共有6個自由度,分別為保持架的質心運動以及保持架的旋轉運動,保持架在三維空間的質心運動可以在慣性坐標系中描述
(3)
式中:mc為保持架的質量;xc,yc和zc為保持架在慣性坐標系中的位置;Fcx,Fcy和Fcz分別為保持架所受的總力在x,y和z方向的分量。
保持架的旋轉運動(動量矩方程)可以在其定體坐標系中描述
(4)
式中:mc為保持架的質量;Ic1,Ic2,Ic3為保持架轉動慣量;ωc1,ωc2,ωc3為保持架的角速度在不同方向的分量;Mc1,Mc2,Mc3為作用于保持架的合力矩在不同方向的分量。
根據擬靜力學結果給定保持架的初始位置和速度,采用變步長的四階Runge-Kutta法對上述微分方程求解,即可得到保持架在任意時刻的位置、速度、載荷以及磨損率等。下面將介紹保持架與球以及引導套圈的相互作用,以得到保持架的所受的合力和合力矩。
1.3 保持架球與的相互作用
圖2(a)~(c)分別為方形兜孔、圓形兜孔和球形兜孔保持架的結構示意圖。由于保持架與球形兜孔保持架的計算最為復雜,本文以球與球形兜孔保持架的相互作用為例進行介紹。
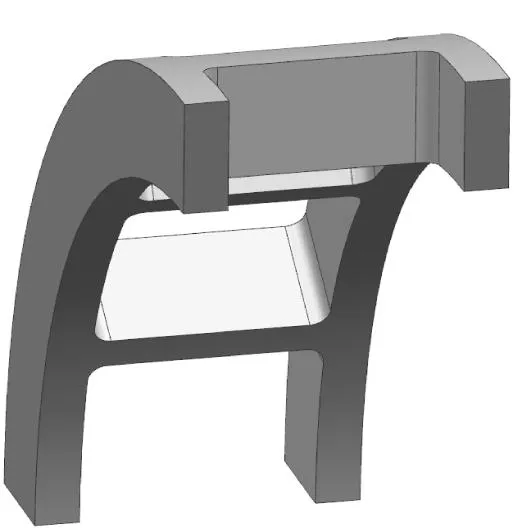
(a) 方形兜孔

(b) 圓形兜孔
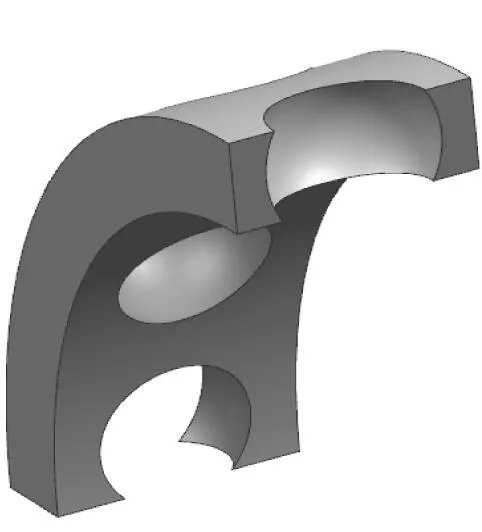
(c) 球形兜孔圖2 不同形狀兜孔保持架結構圖Fig.2 Structural diagram of pocket cages with different shapes
如圖3所示,慣性坐標系中,球心相對保持架中心的位置向量為
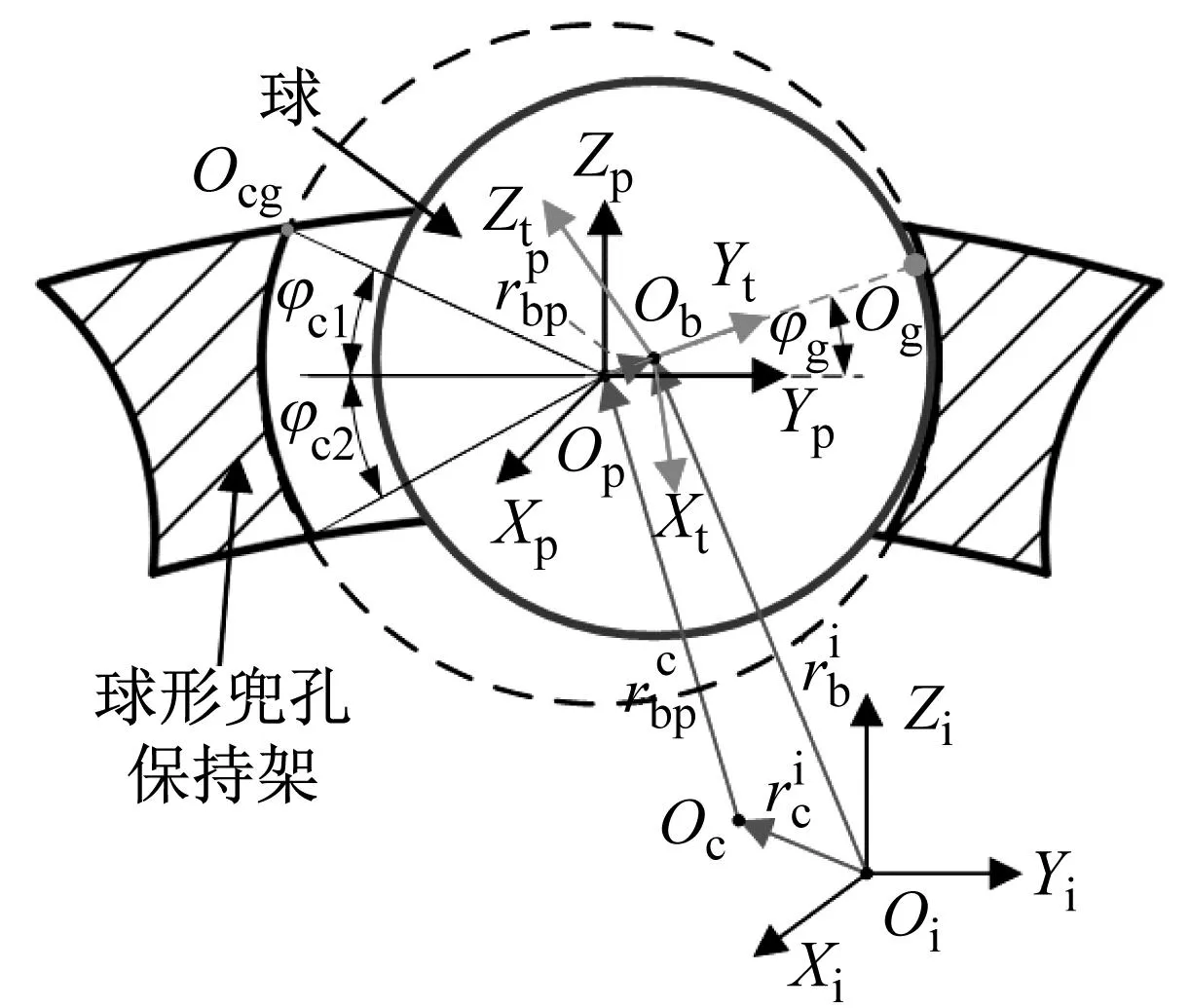
(a) 碰撞點在兜孔球面

(b) 碰撞點在兜孔邊界圖3 球與球兜孔保持架的相互作用Fig.3 Interaction between ball and spherical pocket cage
(5)


(6)
式中,Tic=T(φc1,φc2,φc3)為從慣性坐標系到保持架坐標系的轉換矩陣,φc1,φc2和φc3為保持架的姿態角。
保持架坐標系中,第j個兜孔中心到保持架中心的位置向量為
(7)
式中,θp=2π(j-1)/z為第j個兜孔在保持架坐標系中的方位角。
保持架兜孔坐標系中,球心相對兜孔中心的位置向量為
(8)
式中,Tcp=T(θp,0,0)為保持架坐標系到兜孔坐標系的轉換矩陣。
如圖3所示,當φc2<φg<φc1時,球與保持架兜孔的碰撞點Og在兜孔球面內,當φg≤φc2或φg≥φc1時,碰撞點Og在兜孔球面與保持架內圈或外圈圓柱面的相貫線上,兜孔球面與保持架內圈和外圈的相貫線方程為

(9)
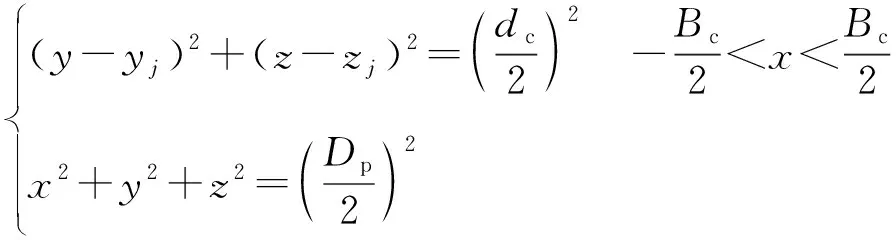
(10)
式中:yj,zj為保持架質心在j個兜孔坐標系中的坐標值;Dc,dc,Bc分別為保持架的外徑、內徑和寬度。


(11)
因此,邊界點Ocg的坐標值滿足
(12)

(13)
(14)
(15)
當φc2<φg<φc1時,球與兜孔的碰撞點在兜孔坐標系中的位置角為
(16)
(17)

(18)
式中,Tpg=T(φ1,0,φ3)為從兜孔坐標系到接觸坐標系的轉換矩陣。
球與兜孔的接觸變形量為
(19)
當φg≤φc2或φg≥φc1時,碰撞點Og相對球心Ob在兜孔坐標系中的位置向量為
(20)
因此球與兜孔的碰撞點在兜孔坐標系中的位置角為
(21)
(22)

(23)
此時,球與兜孔的接觸變形量為
(24)
球與兜孔之間的法向力可計算得
(25)
式中,Kbc為球與保持架兜孔的載荷-變形系數。
則球與兜孔之間的切向力為
Ftc=μcQc
(26)
式中,μc為球與兜孔之間的摩擦因數,設為恒定值。
保持架坐標系中,接觸點相對保持架中心的位置向量為
(27)
式中,Tcg=TpgTcp為保持架坐標系到接觸坐標系的轉換矩陣。
球與兜孔接觸坐標系中,球和保持架在接觸點處的線速度分別為
(28)
(29)
接觸點處保持架相對球的滑動速度矢量為
(30)
則滑動速度的大小為
(31)

對于保持架與球及引導套圈的相互作用,由于滑動速度較大且接觸區較小,可以作為點或線接觸來計算瞬時磨損率,且一般認為磨損主要發生在保持架上。保持架單個兜孔的瞬時磨損率可計算得
(32)
式中:Kc為保持架的磨損系數;Hc為保持架材料的布氏硬度。
沿接觸橢圓長軸和短軸的切向分力根據滑動速度的方向確定
Ftcx=Ftcsinφcb
Ftcz=Ftccosφcb
(33)
接觸坐標系中,球受到保持架的作用力矢量為
(34)

(35)
慣性坐標系中,保持架受到單個球的作用力矢量為
(36)
為便于分析保持架受力對于保持架質心運動的影響,定義了如圖4中所示的保持架方位坐標系。方位坐標系的原點Oca固定于保持架幾何中心,Xca軸沿軸承軸向,Zca軸徑向向外。將保持架受到的作用力在方位坐標系中分解,得到各力在保持架質心軸向、徑向和圓周運動方向上的分力。因此,在保持架方位坐標系中,保持架受到單個球的作用力矢量為

圖4 保持架方位坐標系OcaXcaYcaZcaFig.4 The cage azimuth coordinate system OcaXcaYcaZca
(37)
式中,Tica=T(α,0,0)為慣性坐標系到保持架方位坐標系的轉換矩陣。
球的方位坐標系中,球受到保持架的力矩矢量為
(38)
保持架坐標系中,保持架受到單個球的力矩矢量為
(39)
此外,對于方兜孔和圓兜孔保持架可采用類似的方法建模,主要區別在于方兜孔和圓兜孔沿徑向是直的,球與保持架之間碰撞力在徑向分量為零,無需判斷碰撞點的徑向位置,且僅需繞Zp軸旋轉一次即可將保持架兜孔坐標系轉換到接觸坐標系,因此建模相對更容易,本文不再贅述。
1.4 保持架球與引導套圈的相互作用



圖5 保持架與引導擋邊的相互作用Fig.5 Interaction between cage and guide land
慣性坐標系中,保持架中心相對外圈中心的位置向量為
(40)

(41)
保持架與外圈的接觸點在外圈坐標系中的方位角為
(42)

(43)
式中,Trs=T(φs,0,0)為外圈坐標系到接觸坐標系的轉換矩陣。
保持架與引導套圈的接觸變形量為
(44)

保持架與引導套圈之間的法向力由Hertz線接觸公式計算得
(45)

由此可得保持架與引導套圈之間的切向力
Ftr=μrQr
(46)
式中,μr為保持架與引導套圈之間的摩擦因數,設為恒定值。
外圈坐標系中,接觸點相對外圈中心的位置向量為
(47)
保持架坐標系中,接觸點相對保持架中心的位置向量為
(48)
接觸坐標系中,保持架和套圈引導面上接觸點處的線速度分別為
(49)
(50)
接觸坐標系中,引導面上套圈相對保持架的滑動速度為
(51)
則滑動速度的大小為
(52)

保持架與引導套圈的接觸中,保持架引導面上的瞬時磨損率為
(53)
接觸坐標系中,沿引導面軸向和周向的切向分力分別為
Ftrx=-Ftrsinφrc
Ftry=Ftrcosφrc
(54)
接觸坐標系中,保持架受到引導套圈的作用力矢量為
(55)

(56)
式中,Tis=TrsTir為從慣性坐標系到保持架與套圈接觸坐標系的轉換矩陣。
保持架坐標系中,保持架受到引導套圈的力矩矢量為
(57)
1.5 保持架所受的合力及合力矩
慣性坐標系中保持架受到的合力為
(58)

保持架坐標系中保持架受到的合力矩為
(59)

由此,即可得到保持架所受的合力以及合力矩,采用Runge-Kutta法對式(3)和式(4)進行求解即可得到保持架任意時刻的位置和速度。
2 仿真結果分析
利用上述模型,以某高速角接觸球軸承為例,分析不同兜孔形狀以及兜孔間隙對保持架質心運動、受力以及磨損率的影響。保持架所受的作用力均在保持架方位坐標系中分析,保持架方位坐標系的建立見圖4。軸承結構和材料參數如表1所示。

表1 軸承幾何和材料參數Tab.1 Bearing geometry and material parameters
兜孔間隙Cb分別取0.096 mm,0.135 mm,0.240 mm和0.288 mm,對應的間隙比(兜孔間隙Cb與引導間隙Cr的比值)分別為0.40,0.56,1.00和1.20。該軸承所處的工況為,軸向預載荷7 N,內圈轉速30 000 r/min。需要說明的是,由于本文計算程序采用Fortran語言編寫,大幅提高了計算效率,本文所有結果都選取仿真軸承運轉達到穩定后的值(取仿真1~2 s的結果,舍棄前1 s的結果)進行分析。
2.1 保持架運動穩定性分析
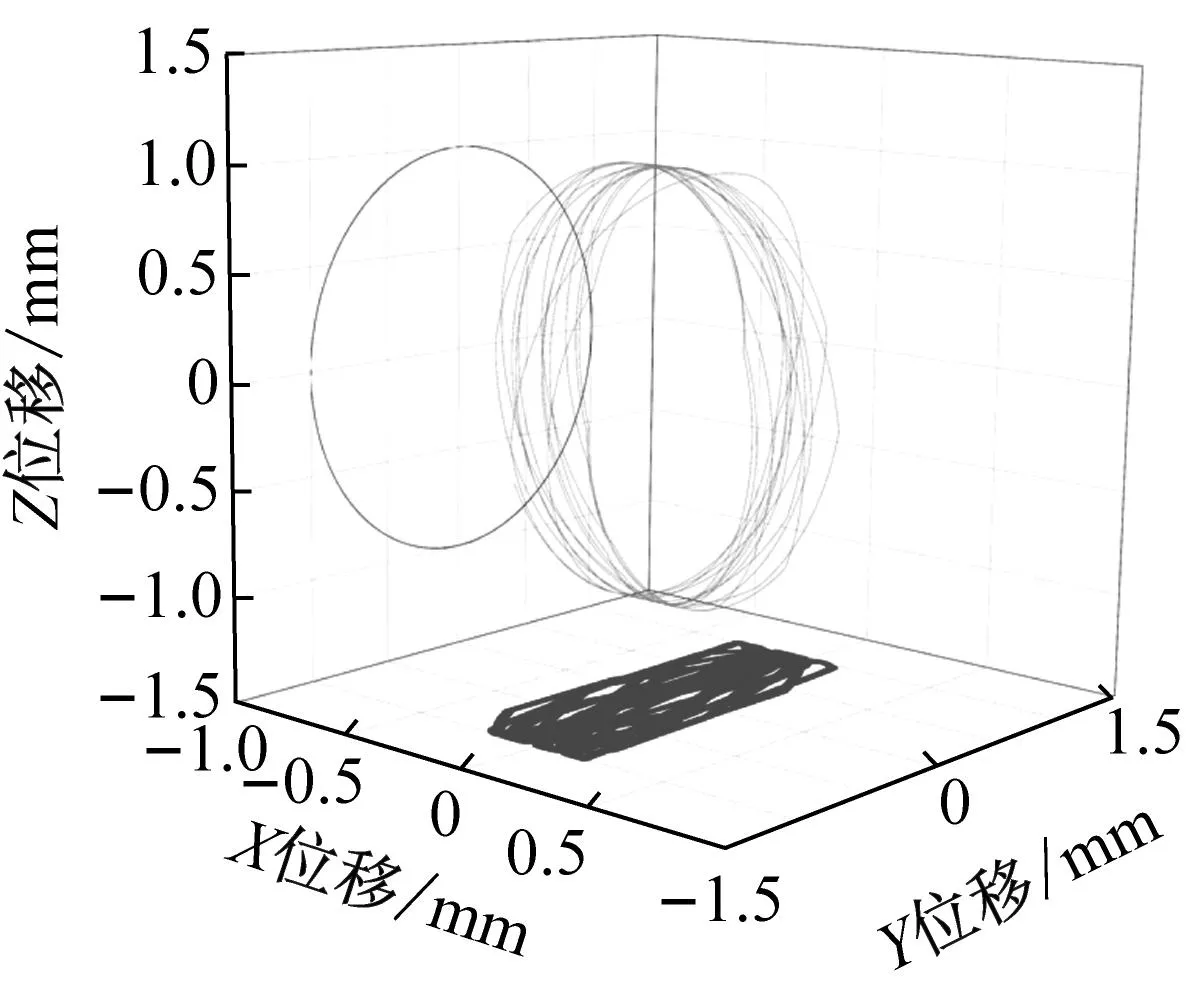
圖6分別給出了不同兜孔形狀的保持架在不同兜孔間隙下的三維質心運動軌跡,需要說明的是圖中空間曲線表示保持架的三維質心運動軌跡,左側曲線和下側點分別是三維運動軌跡在YZ平面(徑向平面)以及XY面的投影,分別表示保持架在徑向平面的渦動以及軸向擺動。可以看出,隨著兜孔間隙的增大,方形和圓形兜孔保持架的三維質心運動軌跡逐漸由圓柱形變為不規則形狀,而球形兜孔保持架的三維質心運動軌跡則始終處于較規則的圓柱形。從XY平面的投影可以看出,隨著兜孔間隙的增大,方形和圓形兜孔保持架的渦動軌跡逐漸由圓形變為多邊形,說明保持架的運動越來越不穩定,而球形兜孔保持架則始終處于穩定的渦動狀態。此外,在不同兜孔間隙下,方形和圓形保持架的渦動軌跡直徑始終等于套圈引導間隙;而球形兜孔保持架則隨著兜孔間隙的增大而逐漸增大,且保持架質心軌跡直徑等于或略小于兜孔間隙,當兜孔間隙大于引導間隙時,球形兜孔保持架的渦動軌跡直徑才等于引導間隙。這說明,不同間隙比下,方形和圓形保持架始終是由套圈引導的,而球形兜孔保持架則由球精確引導。從YZ面的投影可以看出,隨著保持架兜孔間隙的增大,三種兜孔形狀的保持架軸向擺動均逐漸增加,且在不同兜孔間隙下,方形、圓形和球形兜孔保持架的軸向擺動均依次逐漸減小,保持架的軸向擺動與兜孔間隙以及兜孔形狀直接相關。

圖6 不同兜孔形狀以及兜孔間隙下的保持架三維質心軌跡Fig.6 Three-dimensional centroid trajectory of cage under different pocket shapes and pocket gaps
為定量分析不同兜孔形狀以及兜孔間隙下各保持架的運動穩定性,本文采用Ghaisas方法[21],即采用渦動速度偏差比(保持架質心運動速度的標準差與平均速度的比)作為保持架穩定性判據,渦動速度偏差比越小,保持架越穩定。不同兜孔形狀以及兜孔間隙下各保持架的渦動速度偏差比如圖7所示。可以看出,在不同兜孔間隙下,球兜孔保持架的渦動速度偏差比顯著低于方形和圓形兜孔保持架,說明球兜孔保持架的穩定性優于方形和圓形兜孔保持架;在間隙比小于1時(兜孔間隙為0.24時,間隙比為1),方兜孔保持架穩定性優于圓兜孔保持架,而在間隙比大于1時,則是圓兜孔保持架更優。

圖7 不同兜孔形狀及兜孔間隙下的保持架渦動速度偏差比Fig.7 Cage whirl speed deviation ratio under different pocket shapes and pocket gaps
2.2 保持架受力分析
為進一步深入探討保持架兜孔形狀對保持架質心運動的影響,選取兜孔間隙為0.135 mm的保持架進行分析,并將保持架的三維質心運動及受力在保持架方位坐標系中分解,分別對保持架徑向渦動半徑、圓周渦動速度和軸向擺動以及相應方向的受力進行分析。
圖8和圖9分別給出了不同兜孔形狀的保持架徑向受力以及渦動半徑,可以看出方形和圓形兜孔保持架在徑向主要受引導套圈的作用力,球對保持架的徑向作用力約為套圈的1/10,而球兜孔保持架由于被球限制了運動范圍,因此不與套圈發生碰撞。并且可以看出,圓形、方形和球形兜孔保持架在徑向的受力逐漸減小,因此,對應的保持架渦動半徑的波動也逐漸減小,如圖9所示。對比圖8和圖9可以發現,當保持架與引導套圈發生較大碰撞時,保持架的渦動半徑將迅速減小,說明引導套圈對保持架的徑向作用力不利于圓形渦動軌跡的形成,而這也是球兜孔保持架質心軌跡非常規則的原因。此外,圖9的結果表明方形和圓形兜孔保持架的渦動直徑等于套圈引導間隙,而球形兜孔保持架的渦動直徑等于兜孔間隙。但是在Gupta、葉振環、劉秀海、張濤等人的圓形兜孔保持架結果中,保持架的質心渦動半徑在逐漸增大或始終小于引導間隙,這是因為他們仿真軸承運行的時間較短(小于0.1 s),而動力學程序中保持架的質心位置初值是在軸承中心,仿真0.1 s還不足以使保持架運轉到穩定的狀態,因此他們的分析雖有參考價值,但由于保持架未運轉到穩定狀態,結果是不夠準確的。

(a) 方形兜孔

(b) 圓形兜孔

(a) 方形兜孔

(b) 圓形兜孔
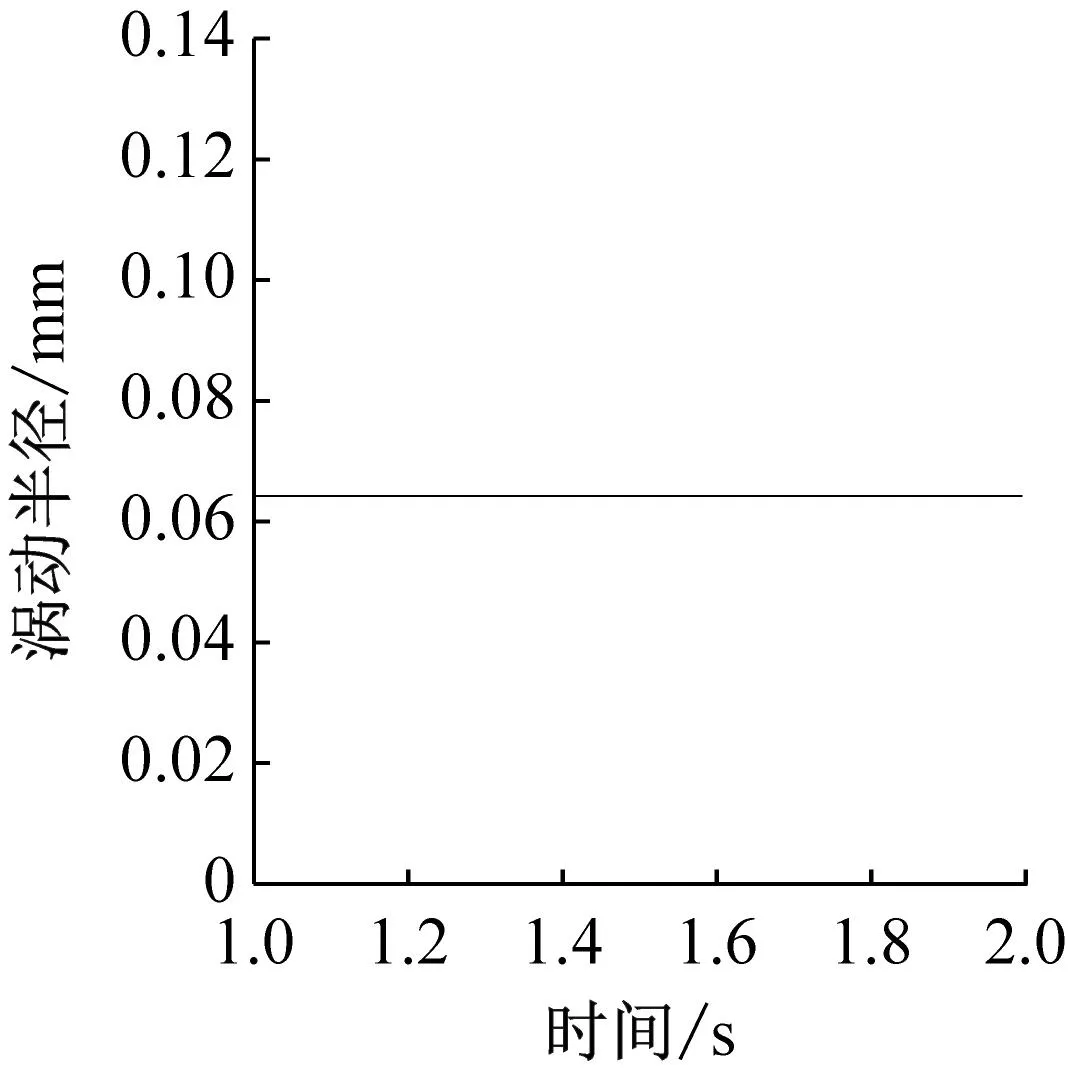
(c) 球形兜孔圖9 不同兜孔形狀保持架的渦動半徑Fig.9 Cage whirl radius of different pockets
圖10和圖11分別給出了不同兜孔形狀的保持架周向受力以及渦動速度,需要指出的是由于保持架方位坐標系的Yca軸與保持架渦動方向相反,因此數值為正的周向力是阻礙保持架的渦動的,而數值為負的周向力驅動著保持架的渦動。從圖10可以看出,對于方兜孔和圓兜孔,保持架在周向主要承受鋼球的作用力,而引導套圈對保持架作用力較小且始終是阻力,這是因為保持架是由固定的外圈引導的,且外圈對保持架周向作用力是由摩擦力產生的;而球對保持架的周向作用力主要由碰撞力承擔,當球超前于保持架的運動時,球驅動著保持架的渦動,當球滯后于保持架的運動時,球阻礙著保持架的渦動。圖10中球對保持架的作用力有正有負,因此時而驅動時而阻礙并維持著保持架的渦動速度處于動態平衡態。由于球與圓兜孔保持架的沖擊力較大,這也就導致了圖11中保持架的渦動速度波動較大,而對于球兜孔保持架則由于碰撞沖擊力很小,因此球兜孔保持架的渦動速度也就非常平穩。

(a) 方形兜孔
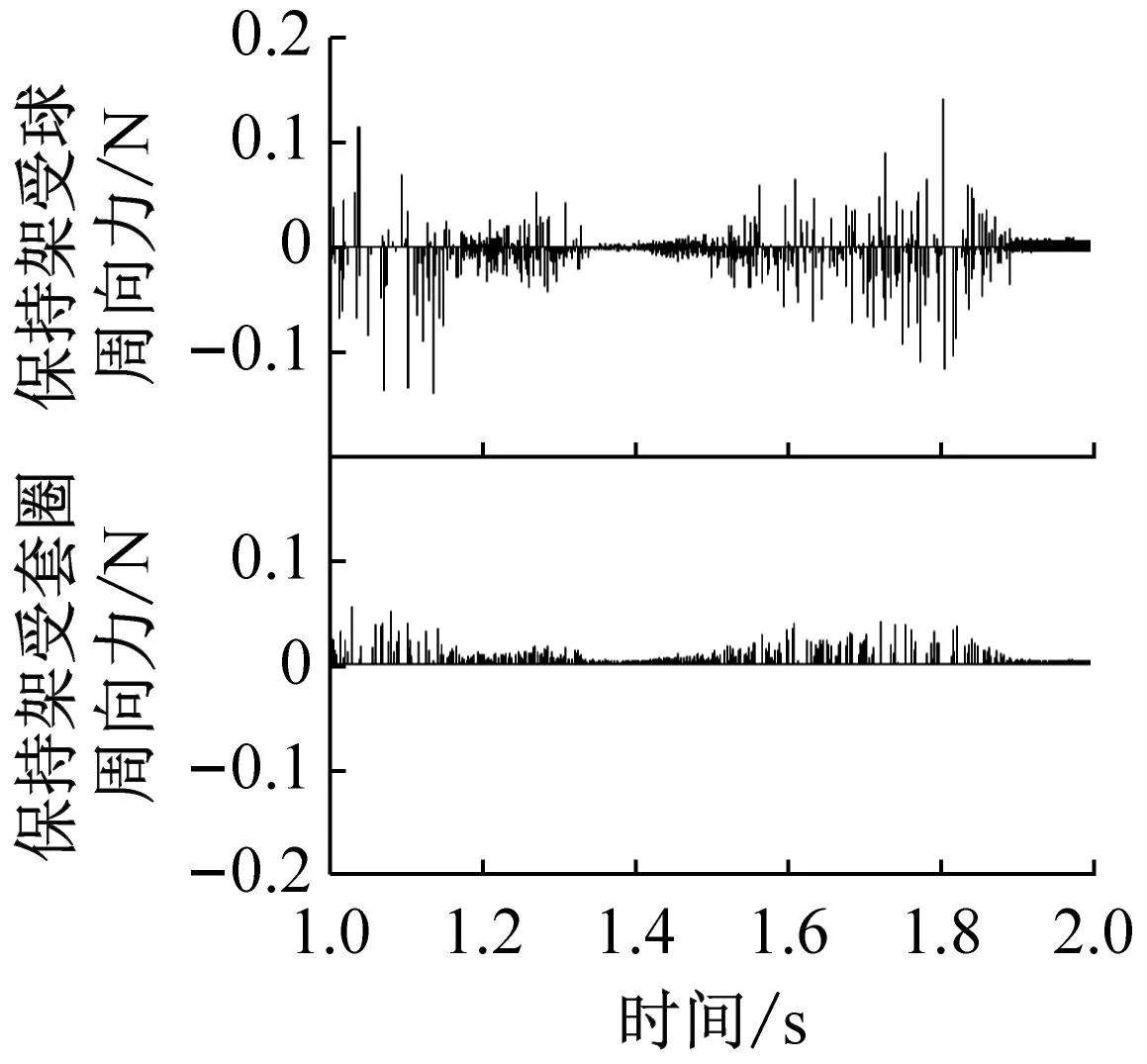
(b) 圓形兜孔

(c) 球形兜孔圖10 不同兜孔形狀保持架的周向受力Fig.10 Circumferential force on the cage of different pockets
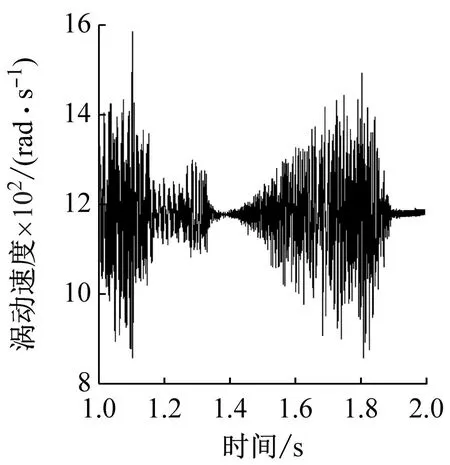
(b) 圓形兜孔

(c) 球形兜孔圖11 不同兜孔形狀保持架的渦動速度Fig.11 Cage whirl speed of different pockets
圖12和圖13分別給出了不同兜孔形狀的保持架軸向受力以及軸向擺動位移,可以看出,在軸向上,保持架僅受球的作用力(對于方兜孔和圓兜孔保持架還受引導套圈的摩擦力在軸向的分量,但由于保持架渦動速度相對于軸向擺動速度大得多,因此摩擦力在軸向的分量約為10-6N級,可忽略不計),因此保持架在軸向上的擺動僅與球對其作用力相關。與徑向力和周向力類似,球兜孔保持架在軸向受力也非常小,對應的保持架軸向擺動量也是很小的。而對于方兜孔和圓兜孔,方兜孔保持架在軸向受力大小和頻率均小于圓兜孔保持架,對應的方兜孔保持架軸向擺動頻率小于圓兜孔保持架,但是擺動范圍卻較圓兜孔更大,這是因為圓兜孔保持架所受軸向力雖然更大,但是頻率也更高,當保持架還來不及沿軸向正向(負向)產生較大的位移時,負(正)的軸向作用力就使得保持架沿負(正)向運動了,使得圓兜孔保持架在軸向處于一個較穩定的動態平衡狀態。

(a) 方形兜孔

(b) 圓形兜孔

(c) 球形兜孔圖12 不同兜孔形狀保持架的軸向受力Fig.12 Axial force on the cage of different pockets
(a) 方形兜孔

(b) 圓形兜孔

(c) 球形兜孔圖13 不同兜孔形狀保持架的軸向擺動Fig.13 Cage axial motion of different pockets
2.3 保持架磨損分析
圖14為不同兜孔形狀保持架兜孔面、引導面以及總的時間平均磨損率,保持架總的時間平均磨損率是兜孔面和引導面磨損率之和。時間平均磨損率表示的是一段時間內磨損量的平均值。可以看出,隨著保持架兜孔間隙的增大,三種兜孔形狀的保持架兜孔時間平均磨損率逐漸降低,且圓兜孔保持架的兜孔時間平均磨損率遠大于方兜孔和圓兜孔保持架。而對于保持架引導面的時間平均磨損率,當兜孔間隙小于引導間隙時,球兜孔保持架不與套圈相接觸,因此引導面的時間平均磨損率為零;當兜孔間隙大于引導間隙時,球兜孔保持架引導面開始出現磨損;圓兜孔和方兜孔保持架引導面的時間平均磨損率隨著兜孔間隙的增加逐漸減小,且圓兜孔保持架引導面的時間平均磨損率始終大于方兜孔;此外,對比保持架兜孔面與引導面的磨損可以看出,球兜孔保持架兜孔面的磨損始終遠大于引導面,而方兜孔和圓兜孔保持架引導面的磨損始終大于兜孔面的磨損,再一次說明了球兜孔保持架是由球引導的,而方兜孔和圓兜孔保持架則是由引導套圈引導的。從圖14(c)可以看出三種兜孔形狀的保持架總的磨損均隨著兜孔間隙的增加而減小,這與圖7所反映的保持架穩定性是相反的,說明保持架越穩定,保持架的磨損率反而更低。這是因為當保持架處于穩定的渦動狀態時,保持架與球以及引導套圈之間的作用力雖然比較小,但是作用頻率卻高得多,因此接觸磨損的時間更長,保持架的磨損反而更大。所以,保持架的設計需要綜合考慮保持架的穩定性和磨損,不能僅單獨地追求更好的保持架穩定性或更低的磨損率。

(a) 方形兜孔

(b) 圓形兜孔

(c) 球形兜孔圖14 不同兜孔形狀保持架的時間平均磨損率Fig.14 Cage time-average wear rate of different pockets
3 試驗驗證
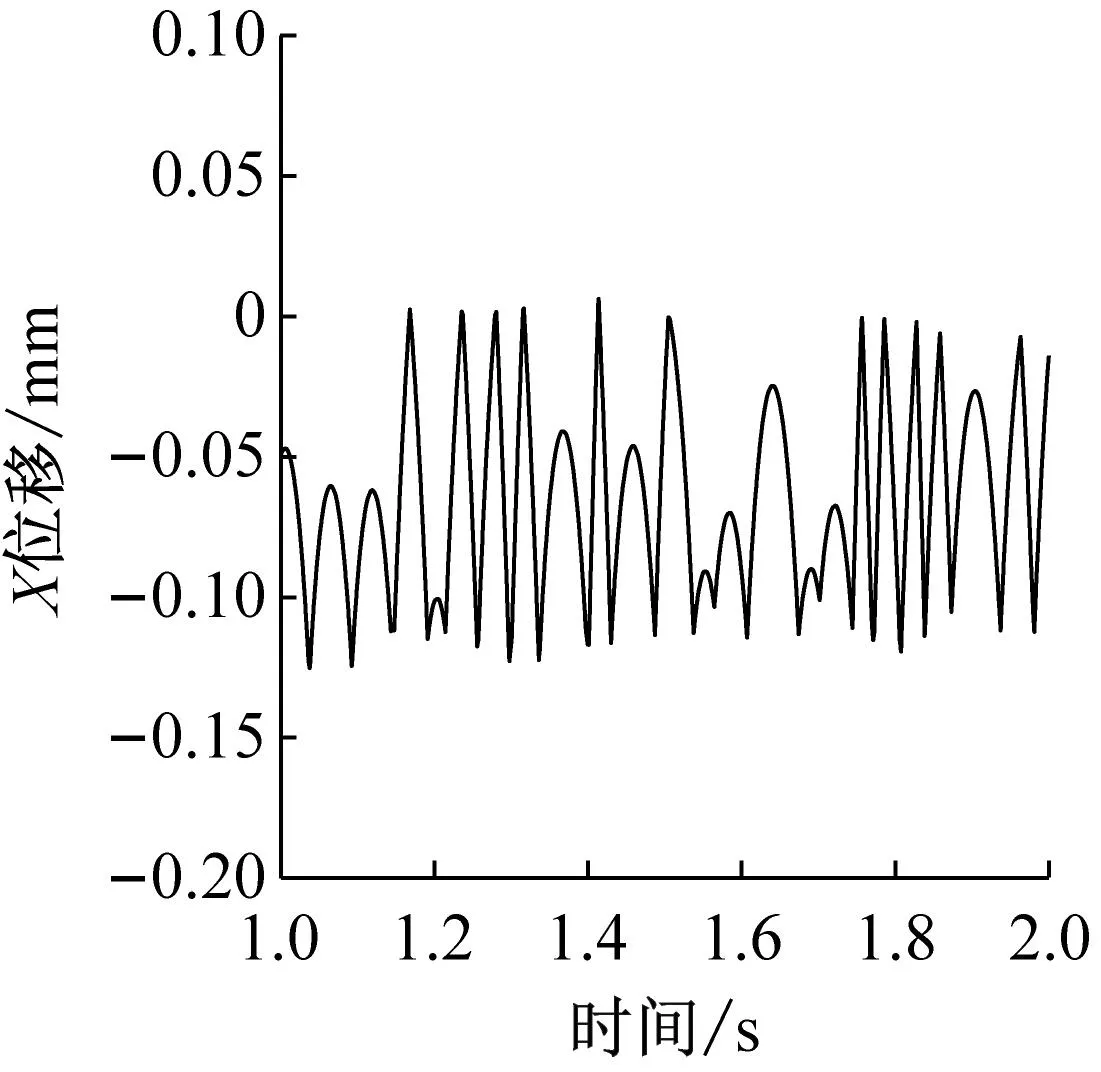
為了驗證本文提出的三種兜孔形狀的保持架動力學數值仿真模型的正確性,與Gupta的2號角接觸球軸承的算例對比驗證圓形兜孔保持架動力學模型得程序。軸承的工況為內圈轉速30 000 r/min,推力載荷為5 000 N,旋轉徑向載荷為4 000 N。本文程序1號兜孔的磨損率及保持架質心軌跡與Gupta的結果如圖15所示。本文程序磨損率與Gupta結果趨勢一致,大小基本相等,最大誤差不超過12%,且保持架質心軌跡與Gupta也基本一致,因此本文圓柱形兜孔保持架動力學程序正確性和可靠性得到了驗證。方形兜孔和球形兜孔保持架動力學結果報道較少,下面將用課題組設計的高速角接觸球軸承保持架動態特性試驗機進行試驗驗證。
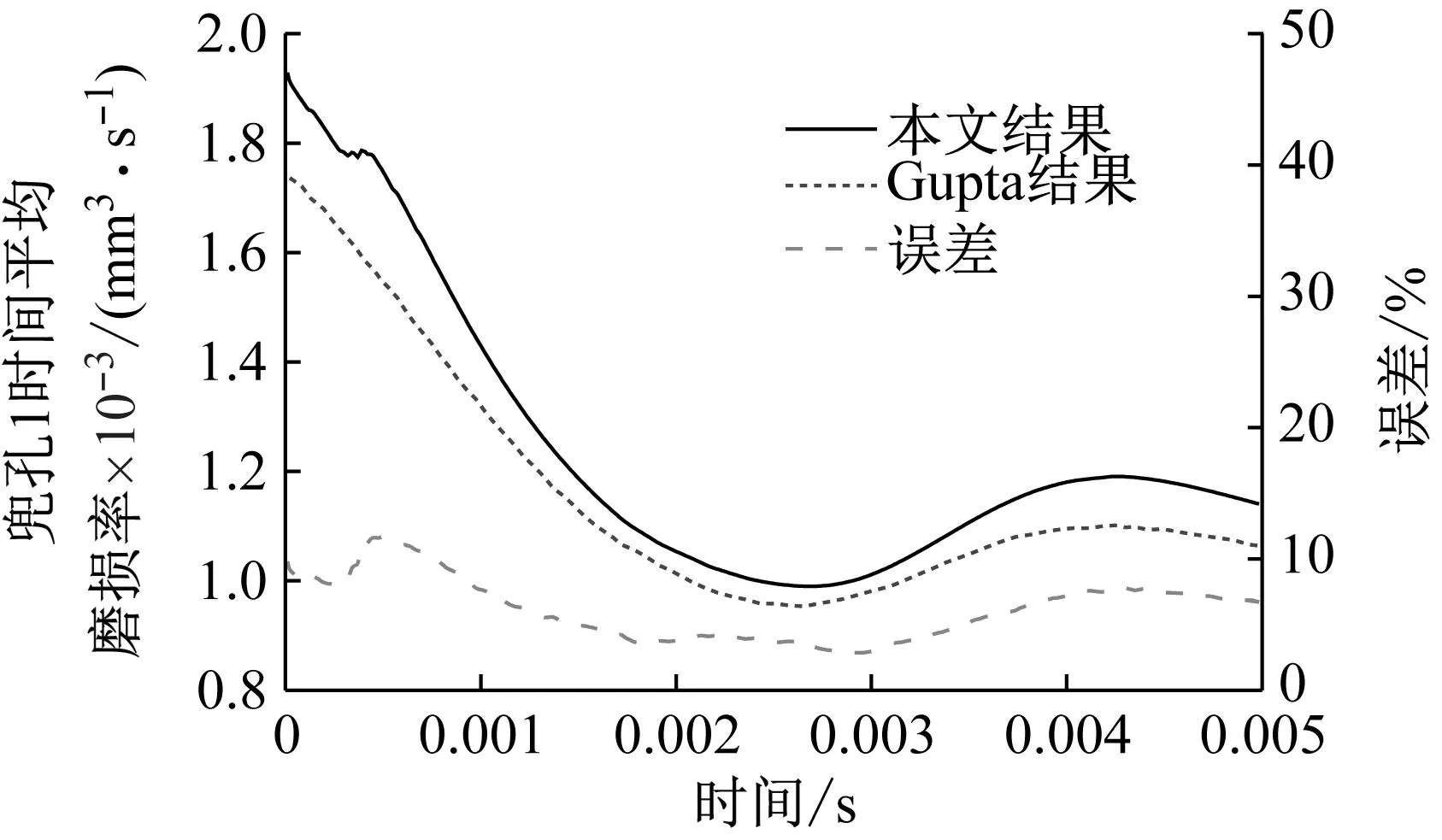
(a) 磨損率
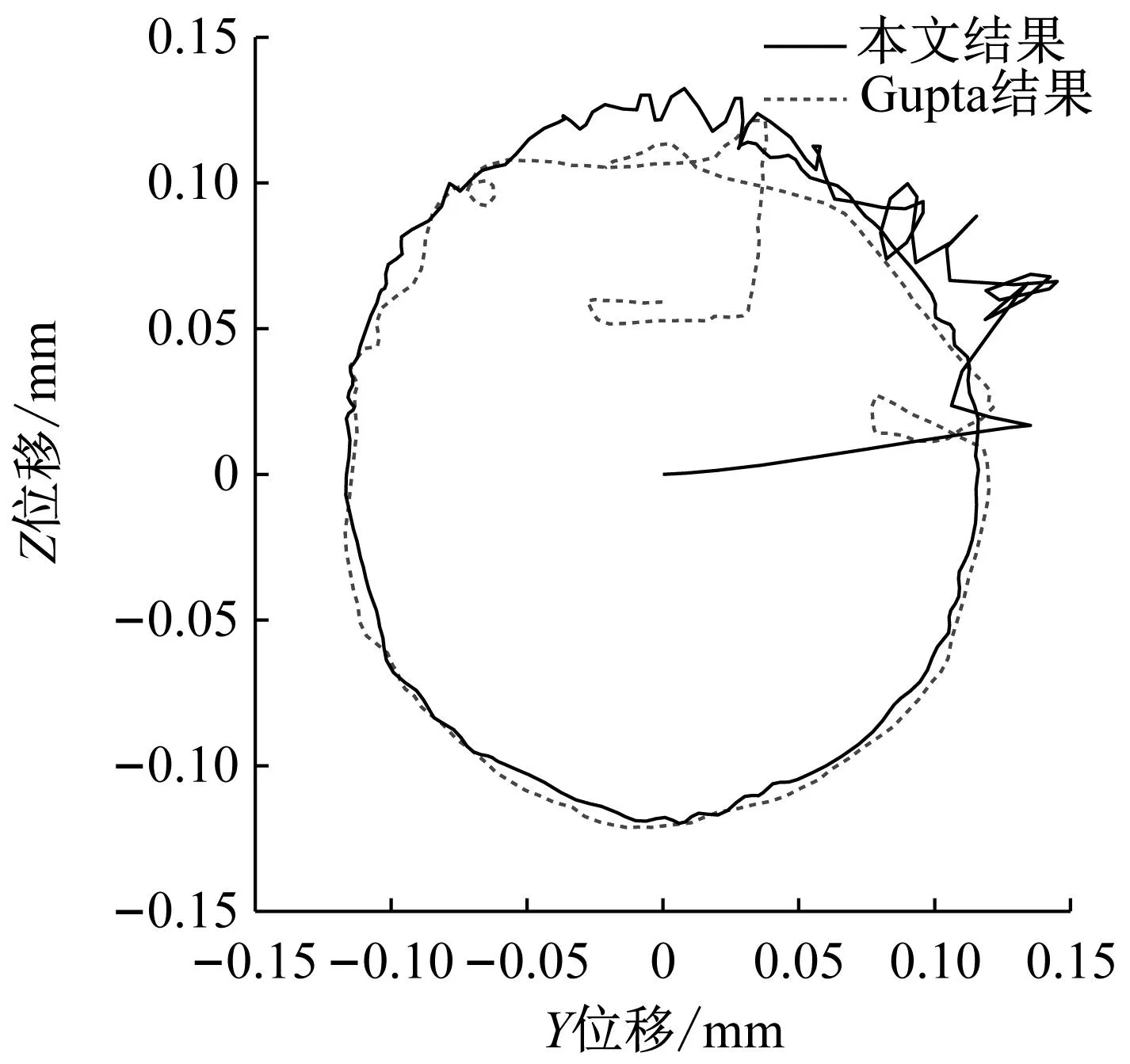
(b) 質心軌跡圖15 本文圓柱兜孔保持架動力學結果與Gupta結果對比Fig.15 Comparison between the cylindrical pocket cage dynamic results of current model and Gupta’s model
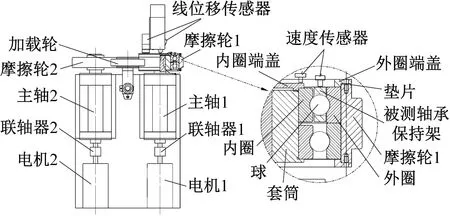
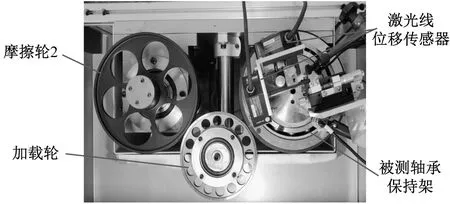
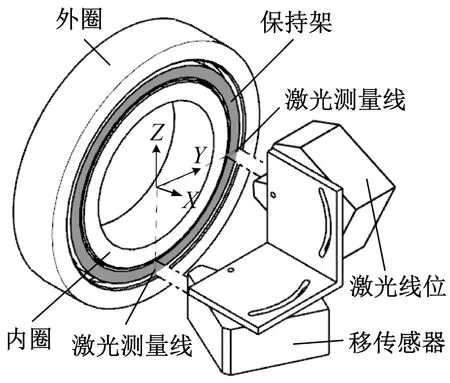
為進一步驗證本文提出的三種兜孔形狀的保持架動力學數值仿真模型的正確性,采用課題組設計的高速角接觸球軸承保持架動態特性試驗機[22-23]分別對這三種兜孔形狀的保持架進行試驗探究,試驗機的結構圖如圖16所示。電機1通過聯軸器直接帶動被試軸承內圈旋轉,電機2通過帶動摩擦輪2、加載輪以及摩擦輪1,從而帶動被試軸承外圈旋轉,從而實現被試軸承內外圈在一定轉速范圍內任意同向或反向旋轉。選用兩個如圖16所示的LJ-G015K激光線位移傳感器測量保持架的三維質心軌跡,其X軸測量范圍為(高度)15±2.3 mm,Z軸測量范圍距離7 mm;激光線位移傳感器打出來的激光線是由一排激光點組成的,其中有效測量點為800個,兩相鄰激光點的間距恒定為10 μm,即800個點中700個點為有效數據,兩端各50點為無效數據,在有效測量范圍內被測物體超量程時顯示為999.999的無效數據,根據無效點的個數變化情況及各個點之間的距離即可算出被測物體X向的位移,被測物體Z或Y向的位移可直接由得到的有效數據取平均值計算,由此就可以在不改變軸承結構的情況下同步測得保持架的徑向和軸向位移,也就是得到保持架的空間三維質心軌跡。被試軸承參數如表2所示。軸承內圈轉速為1 000 r/min,外圈固定,軸向預載荷為100 N。需要說明的是,由于激光線位移傳感器尺寸的限制,試驗所用的軸承較大,本試驗主要用于驗證所建立數值仿真模型的正確性。
(a)
(b)
(c)

(d)圖16 試驗機結構圖以及測量原理圖Fig.16 Test machine structure diagram and measurement principle diagram

表2 被試軸承幾何參數Tab.2 Geometric parameters of the tested bearing
圖17~19為數值仿真和試驗得到的三種兜孔形狀保持架的三位質心軌跡以及Y向位移響應,從圖中可以看出,三種兜孔形狀的保持架質心軌跡形狀和軌跡半徑都與仿真結果接近,且從Y向位移響應的結果看,仿真結果和試驗結果也保持較好的同步性,說明仿真和試驗得到的保持架渦動速度是一致的,從而在保持架質心位移和速度兩個方面驗證了仿真結果的可靠性與準確性。
(a) 數值仿真三維質心軌跡

(b) 試驗三維質心軌跡

(b) 試驗三維質心軌跡

(c) Y方向位移響應圖18 圓兜孔保持架質心運動Fig.18 Cylindrical pocket cage motion

(a) 數值仿真三維質心軌跡

(b) 試驗三維質心軌跡

(c) Y方向位移響應圖19 球兜孔保持架質心運動Fig.19 Spherical pocket cage motion
此外,試驗結果還表明方形和圓形兜孔保持架的質心軌跡直徑等于保持架引導間隙,而球兜孔保持架的質心軌跡直徑等于兜孔間隙,從而試驗證明了圓形和方形兜孔保持架由套圈引導,而球兜孔保持架由球引導;并且試驗結果還表明方形、圓形和球形兜孔保持架的軸向擺動范圍逐漸減小,這些與仿真分析結論均是一致的。
4 結 論
本文建立了方形、圓形和球形兜孔保持架的高速角接觸球軸承動力學數值仿真模型,并通過試驗驗證了三種兜孔形狀保持架動力學模型的正確性,在此基礎上,詳細探討了保持架兜孔形狀及兜孔間隙對保持架動力學特性的影響,并得出如下結論:
(1) 試驗和仿真結果均表明方形和圓形兜孔保持架由套圈引導,而球兜孔保持架由球引導;方形、圓形和球形保持架的軸向擺動范圍依次減小。
(2) 隨著兜孔間隙的增大,三種兜孔形狀的保持架穩定性均逐漸降低,保持架軸向擺動范圍逐漸增大,且球兜孔保持架穩定性遠高于方兜孔和圓兜孔保持架穩定性,軸向擺動范圍也低于方兜孔和圓兜孔保持架;間隙比小于1時,方兜孔保持架穩定性優于圓兜孔,而間隙比大于1時則劣于圓兜孔。
(3) 保持架的運動與鋼球和套圈之間的受力相關。保持架的徑向渦動半徑主要受保持架和套圈之間的作用力影響,保持架的軸向擺動以及周向速度主要受保持架兜孔與球之間的作用力影響。球兜孔保持架與球和套圈之間的作用非常小,因此運動很穩定。
(4) 方形和圓形兜孔保持架的磨損主要發生在引導面上,而球兜孔保持架的磨損主要發生在兜孔面上。隨著兜孔間隙的增大,三種兜孔保持架的磨損率均逐漸降低,且球兜孔保持架的磨損率遠高于另兩種保持架。