基于實際出行場景的整車駕控性能測試與評價
2024-04-18 10:28:22王長青孟云龍雷斌梁榮亮
汽車文摘 2024年4期
王長青 孟云龍 雷斌 梁榮亮
【摘要】為了直觀地評價中國消費者實際出行場景的整車駕控性能,提出一種駕控性能測試與評價方法。根據中國路況,結合工程經驗與國家標準,選擇駕控性能測試工況與測試工況中的評價指標及其權重,選取3款車型在測試工況下進行道路試驗,通過數據分析得出指標限值。結果表明,3款車型的駕控性能得分與車輛級別、能源類型相關,且與駕駛員主觀駕駛感受一致,說明此駕控性能測試與評價方法具有可行性與準確性,可以為開發或驗證階段的工程樣車進行整車駕控性能的策略標定及驗證測評。
關鍵詞:出行場景;駕控性能;客觀評價方法;動力駕駛性;制動性能;操縱穩定性
中圖分類號:U467.1? ?文獻標志碼:A? DOI: 10.19822/j.cnki.1671-6329.20230125
Vehicle Driving Control Performance Test and Evaluation Based on Actual Travel Scenarios
Wang Changqing1,Meng Yunlong2,Lei Bin1,Liang Rongliang1
(1.CATARC Automotive Test Center (Tianjin) Co., Ltd, Tianjin 300300; 2.Hebei University of Technology, Tianjin 300400)
【Abstract】 In order to intuitively evaluate the driving control performance of the vehicle based on the actual travel scenarios of Chinese consumers, this paper proposes a driving control performance testing and evaluation method. According to Chinese road conditions, combined with engineering experience and national standards, driving control performance test conditions and the evaluation indexes and weights in the test conditions are selected. Three vehicles are selected for the road test under the test conditions, and obtain the index limits through data analysis. The results show that the driving control performance scores of the three vehicles are related to the level and energy type of the vehicle,are consistent with the subjective driving experience. It indicates this driving performance testing and evaluation method is feasible and accurate, and can be used for strategy calibration and validation evaluation of the entire vehicle driving performance for engineering samples in the development or validation stage.
Key words: Travel scenarios, Driving control performance, Objective evaluation method, Powerdriving performance, Braking performance, Handing stability
0 引言
整車駕控性能是指汽車動態行駛時駕駛員對車輛可駕馭、可控制的能力[1]。駕控性能包括動力駕駛性、制動性能以及操縱穩定性,這3項性能是整車綜合性能的核心部分。
目前對于動力駕駛性、制動性能、操縱穩定性評價主要有2種,其一為汽車企業測評人員在專業開發層面進行的工程化評價;其二為自媒體、第三方汽車行業研究機構進行的評測。這2種評價均基于現有的一系列國家標準進行,而國家標準所規定的測評工況與中國消費者的典型出行場景特征不符,無法準確地體現日常行駛工況下的整車性能及消費者在日常出行時的主觀駕駛感受。
余超等[1]建立了一套基于用戶真實用車體驗的汽車動態駕控性能評價方法。馬健君等[2]通過問卷調研方式獲取用戶對汽車各項性能的得分,運用3種方法設定權重系數,得出整車性能評價結果。黃偉等[3]提出了一種基于模糊神經網絡的起步工況駕駛性品質評估方法,確定了響應延遲、加速時間、沖擊度、加速度峰值等多維評價指標來進行車輛駕駛性品質的評估。吳延鵬等[4]通過對市場用戶制動工況的分析,結合整車道路制動性能試驗手段,搭建了整車制動踏板感覺試驗評估體系。
有關駕控性能的測評方式雖取得了一定的進展,但這些方法未完全覆蓋日常駕駛車輛操控性能的所有關鍵指標。本文針對中國消費者出行場景,對整車駕控性能進行詳盡的測試與評價。首先根據消費者的實際出行場景,結合一系列國家標準設定試驗工況及其評價指標和權重。其次在設定工況下進行大量試驗,通過分析得出評價指標的限值,最后通過實車測試驗證測評方式的有效性。
1 整車駕控性能測評方法
1.1 制定測評方案
針對中國消費者出行場景的整車駕控性能測試評價提出以下方案:
(1)根據消費者日常出行場景,進行小樣本調研,并結合工程經驗和各項國家標準,設定試驗工況、試驗工況下的評價指標與指標權重。
(2)對設定的試驗工況及其評價指標進行大量試驗,得出每個評價指標的分布以及各指標限值。
(3)選取不同能源類型的車型進行試驗驗證。
1.2 測評方法要求
隨著新能源汽車以及線控底盤的興起,汽車的動力傳動方式發生改變,汽車結構布局也變得更加緊湊,這使得新能源汽車整車駕控性能的特點與傳統汽車整車駕控性能特點不同。
在設定測試工況與進行試驗時應考慮車輛類型,保證測評方法的全面性;在設定評價指標及其權重時,應考慮消費者的關注點,保證測評方法的嚴謹性;在對測評方法進行驗證時,將得出的客觀數據與汽車類型、特點進行對比,保證測評方法的準確性。
1.3 駕乘體驗測評細則
本次測試項目主要參考《中國汽車消費者研究與評價(CCRT)管理規則(2021年版)》附錄D中的駕乘體驗測評細則。在CCRT駕乘體驗細則中篩選能夠進行客觀試驗的項目做為本文測評項目。
動力駕駛性測評細則中主要關注起步和超越加速過程中動力系統扭矩大小、動力響應是否及時、起步是否吃力、加速線性度及加速連續性;制動性能主要關注制動踏板感覺、制動效能、制動舒適性、制動穩定性以及制動振動噪聲;操縱穩定性主要關注轉向力、轉向響應、回正性能、轉向精準性、直線行駛穩定性、彎道行駛穩定性以及瞬態操縱穩定性。
1.4 動力駕駛性工況調研
在CCRT選取測試工況的基礎上,進行小樣本調研,主要目的是進行動力駕駛性的工況選擇。調研對象應滿足性別分散、學歷分散、年齡階段分散、行業分散、工作分散,有較高的汽車使用頻率。采用問卷調查的形式對滿足以上條件的調研對象進行調研。
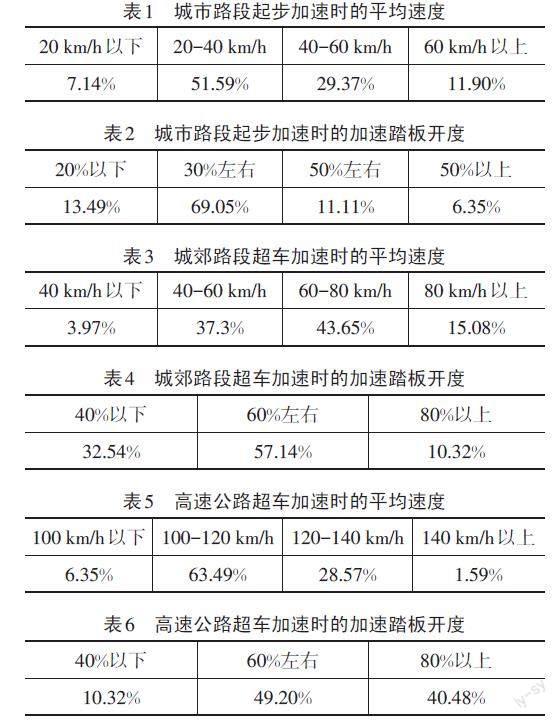
在全國15個省市選取630個有效樣本,對調研結果進行分析。關于消費者駕駛習慣的調研結果如表1~表6所示。
由表1~表6可看出大部分消費者在城市路段起步時的平均速度集中在20~40 km/h內,踏板開度約為30%;在城郊路段超車時的平均速度集中在40~80 km/h內,踏板開度約為60%;在高速公路超車時的平均速度集中在100~140 km/h內,踏板開度為60%以上。
2 駕控性能測試工況與評價指標
整車駕控性能測試工況與評價指標包含3個方面:動力駕駛性、制動性能和操縱穩定性。
2.1 動力駕駛性
動力駕駛性指的是直線行駛性能,也就是動力系統的表現,其主要包含2個方面:動力系統的響應性和平順性。
目前GB/T 12543 《汽車加速性能試驗方法》[5]中的測評工況僅包括0~100 km/h以及60~100 km/h全油門加速的極限工況,但在日常用車過程中這2種工況十分少見,其與中國消費者典型出行場景不符。
由CCRT駕乘體驗測評細則可以看出,中國消費者在日常行車場景中的動力駕駛性方面更關注加速的快慢(推背感)以及動力輸出是否平順(頓挫感)。消費者更希望汽車動力強勁、響應快以及傳動系統換擋平順。
結合加速工況調研結果(表1)與中國實際出行場景,將動力駕駛性測試工況分為低速(0~30 km/h,30%踏板開度)、中速(40~80 km/h,60%踏板開度)以及高速(100~140 km/h,100%踏板開度)。低速動力駕駛性測試是模擬市區工況起步加速及交通擁堵場景下走走停停狀態車輛的動力駕駛性能;中速動力駕駛性測試是模擬市區快速路工況車輛加速超車場景下,車輛的動力性能及動力響應特性;高速動力駕駛性測試是模擬高速工況下車輛后半程加速的動力性能及動力響應特性。選擇加速時間、加速踏板時間以及動力系統沖擊作為動力駕駛性的評價指標。
其中選取的高速公路油門踏板開度與調研結果有所不同,其原因有2點:根據工程經驗,一些車型在踏板開度達到70%以上時已接近全踏板開度動力輸出;在對汽車進行動力駕駛性測試時,應考慮到全油門加速的極限性能。所以選擇100~140 km/h、100%加速踏板開度進行測試。
2.2 制動性能
目前對于整車制動性能的評價工況大多基于GB 21670—2008《乘用車制動系統技術要求及試驗方法》[6],該標準中的試驗工況大多為極限制動工況,不能準確體現整車在實際出行工況下的制動性能以及駕駛員的主觀感受。
由CCRT駕乘體驗測評細則可以看出,對于制動性能,消費者更關心汽車在制動過程的制動距離、制動穩定性和制動過程中的信心感。消費者希望汽車制動效能呈現線性變化,感覺不到明顯的車身頓挫、搖晃等情況。
從消費者日常實際用車場景出發,結合國家標準以及工程經驗,選取干地制動測試、濕地制動測試、制動穩定性測試、制動踏板線性度測試以及輕微制動測試作為制動性能的測試工況。選定制動距離、制動穩定性、制動響應靈敏度、制動踏板線性度、制動舒適性作為測試的指標。
制動距離分為干地制動距離以及濕地制動距離。干地制動距離是指車輛在高附著系數路面上車速從100 km/h下降到0 km/h的制動距離;濕地制動距離是指車輛在濕滑路面上車速從80 km/h下降到20 km/h的制動距離。
制動穩定性試驗是指車輛以80 km/h的初速度在對開路面行駛時制動,車輛是否發生制動跑偏失控情況,評價指標是橫擺角速度峰值。
制動踏板線性度包括初期制動踏板力線性度、初期制動踏板行程線性度、末期制動踏板力線性度。初期制動踏板力線性度評價車輛在小減速度范圍(0~4 m/s2)內踏板力輸入和減速度輸出之間的線性關系;初期制動踏板行程線性度評價車輛在小減速度范圍(0~4 m/s2)內踏板行程輸入和減速度輸出之間的線性關系;末期制動踏板力線性度評價車輛在大減速度范圍(5~8 m/s2)內踏板力輸入和減速度輸出之間的線性關系。
制動響應靈敏度包括輕微制動響應時間以及緊急制動響應時間。輕微制動響應時間評價車輛在小減速度范圍(0~4 m/s2)制動系統的響應時間;緊急制動響應時間評價車輛在緊急制動下的響應時間。
制動舒適性包括制動俯仰角以及減速度變化率。制動俯仰角評價車輛在制動過程中隨重心轉移變化的制動過程俯仰特性;減速度變化率評價車輛在制動過程中保持總體制動性能一致性的能力。
2.3 操縱穩定性
操縱穩定性不僅影響汽車駕駛時的操縱方便程度,也決定汽車安全行駛的關鍵性能,因此對于整車操縱穩定性的要求越來越高。
目前對于操縱穩定性的評價方式有2種,即主觀評價與客觀評價。主觀評價法是根據人的感覺進行評價,但易受到評價人員狀態和環境因素影響,難以保證評價結果的一致性和準確性[7]。客觀評價法是基于GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]進行試驗,該標準中評價指標繁多且難以理解,不能直觀地反映汽車操縱穩定性品質。本文通過對該標準篩選得出關于操縱穩定性的試驗,并對其評價指標進行簡化。
由CCRT駕乘體驗測評細則可以看出,對于操縱穩定性,消費者更關注駕駛車輛過程中是否感覺到“飄”、“反應遲鈍”、“晃”(汽車行駛方向可控力下降,難以穩定)以及轉向盤輕便程度的問題。這些問題涵蓋了轉彎時車身側傾的大小、極限避障能力、直線行駛性能、回正性能、轉向響應特性和機動性等性能。
由于對轉向盤轉向力輕便程度的評價因人而異,不能通過客觀測試結果表示其優劣。根據日常用車場景匹配相關工況,對消費者關注的操縱穩定性能進行測試。選取車身側傾度測試、避障試驗、中心區轉向特性測試、低速轉向回正性能測試、高速轉向回正性能測試、轉向盤轉角階躍輸入試驗、掃頻試驗、最小轉彎直徑測試以及轉向盤圈數測試作為操縱穩定性的測試工況。選取穩態、瞬態操縱穩定性、中心區轉向特征、轉向響應特性、轉向回正性能、機動性作為測試指標。
穩態操縱穩定性通過穩態回轉試驗評價車輛側傾度大小。瞬態操縱穩定性通過測試避障最高通過車速評價車輛極限避障能力。
中心區轉向特征通過中心區連續正弦輸入試驗中的側向加速度遲滯評價車輛響應相對于轉向盤力矩的滯后,轉向盤轉角遲滯評價車輛轉向盤轉角相對于轉向盤力矩的滯后,來表征直線行駛性能。
轉向響應特性通過轉向盤轉角階躍輸入試驗中的側向加速度響應時間評價車輛的響應速度;通過掃頻試驗中的諧振頻率評價車輛在快速轉向輸入時的響應特性。
轉向回正性能包括橫擺角速度超調量和殘留轉向盤轉角。橫擺角速度超調量評價車輛在高速轉彎行駛回正后是否會發生較大幅度的晃動;殘留轉向盤轉角評價車輛在低速行駛工況下(如停車場)的回正能力。
機動性包括最小轉彎直徑和轉向盤圈數。通過測試車輛的最小轉彎直徑評價靈活性;通過測試車輛的轉向盤圈數評價駕駛便利性。
3 測試與評價過程
3.1 動力駕駛性
3.1.1 低速動力駕駛性測試
車輛以30%油門開度由靜止加速至30 km/h。
3.1.2 中速動力駕駛性測試
在車輛以不低于50 km/h勻速行駛狀態下,松開加速踏板,帶擋滑行至(40±1) km/h時,立即踩下加速踏板將油門開度達到60%±1%并保持(加速踏板起躍時間不大于0.2 s),車輛加速至80 km/h以上。
3.1.3 高速動力駕駛性測試
在車輛以不低于110 km/h的速度勻速行駛狀態下,松開加速踏板,帶擋滑行至(100±1) km/h時,立即踩下加速踏板將油門開度提升至100%并保持(加速踏板的起躍時間不大于0.2 s),車輛加速至140 km/h以上。
3.1.4 部分數據處理結果
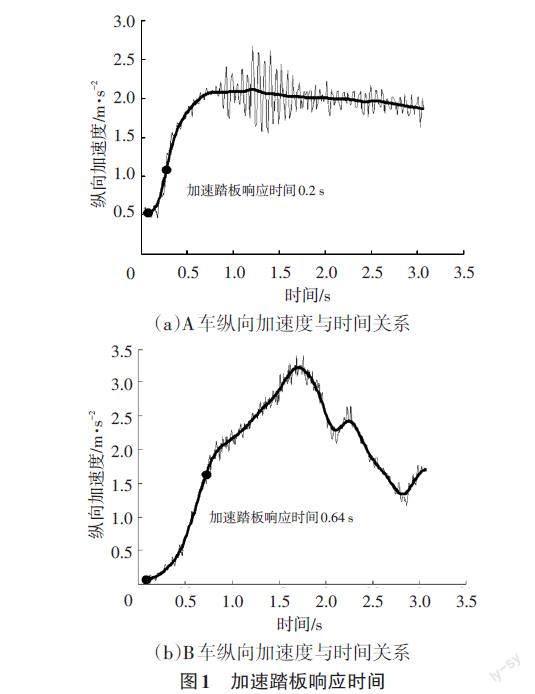
圖1為A車、B車起步時加速踏板開度、縱向加速度與時間的關系。對縱向加速度數據進行3 Hz低通濾波處理,圖中加速踏板響應時間為加速踏板開度超過10%到縱向加速度達到峰值的50%所需時間。A車、B車加速踏板響應時間分別為0.20 s和0.64 s,分析結果可以得出A車加速踏板響應較快,在起步加速時可以更快地達到峰值加速度。
圖2為車輛起步時的沖擊變化。對縱向加速度數據進行10 Hz低通濾波處理。
圖中最大沖擊為踩下踏板至縱向加速度達到峰值過程中縱向加速度最大斜率。得到C車、D車起步沖擊分別為5.29 m/s3和19.78 m/s3,分析結果可以得出甲車起步沖擊較小,在其起步加速時駕駛員會有更舒適的主觀體驗。
3.2 制動性能
在進行制動試驗時,制動之前手動變速器車型應切換至空擋,自動變速器車型應保持在D擋。
3.2.1 干地制動測試
在滿載狀態下,試驗車加速至105 km/h以上,松開加速踏板,當車速下降至(100±2) km/h時,快速踩下制動踏板到防抱死制動系統(ABS)開始工作或踏板力達到500 N,直至車輛停止。
3.2.2 濕地制動測試
道路條件滿足GB/T 21910—2017《轎車輪胎濕路面相對抓著性能試驗方法》[9]中5.1和5.2的要求。將試驗車在啟動路段加速至(85±2) km/h,車輛進入試驗路面,松開加速踏板,同時進行緊急制動,ABS系統開始工作,并維持制動直至車輛停止。
3.2.3 制動穩定性測試
車輛左右車輪分別在附著系數不同的2種路面上以80 km/h的初速度全力制動,直至車輛靜止(試驗過程中允許進行轉向盤修正)。其中路面應滿足高附著系數路面的附著系數kH≥0.5,低附著系數路面與高附著系數路面的附著系數應滿足kH/kL≥2。
3.2.4 制動踏板線性度測試
在輕載狀態下,試驗車加速至105 km/h以上,松開加速踏板,當車速下降到(100±2) km/h時,勻速慢速踩下制動踏板直到觸發ABS工作,過程要求減速度呈線性變化,且盡可能延長踩踏過程。
3.2.5 輕微制動測試
在輕載狀態下,試驗車加速至65 km/h以上,松開加速踏板,當車速下降到(60±2) km/h時,快速踩下制動踏板并保持踏板行程不變(制動踏板起躍時間不超過0.2 s),直至車輛停止。制動踏板行程選定,應滿足在該次試驗過程中,車速在50~30 km/h內,平均減速度在1.8~2.2 m/s2內。
3.2.6 部分數據處理結果
圖3為制動穩定性測試中橫擺角速度變化。對橫擺角速度1~2 s內的數據進行濾波處理,橫擺角速度峰值為踩下制動踏板后2 s內橫擺角速度絕對值的最大值。得出圖3中2車輛的橫擺角速度峰值分別為2.82 (°)/s和9.67 (°)/s,分析得出E車在對開路面制動時的橫擺角速度峰值較小,具有較好的制動穩定性。
圖4為制動踏板力與制動減速度的關系。選用踏板行程大于5 mm至減速度到達4 m/s2范圍內的制動踏板力和減速度計算制動踏板初期的力線性度。計算公式如式(1)。
[R2=F?A-FAn2F2-F2nA2-A2n]? ? ? ? ?(1)
式中:R2為線性度,F為制動踏板力,A為減速度,n為數據個數。
求得圖4中G車和H車的初期制動踏板力線性度分別為0.9 845和0.8 968。分析結果可以得出G車在踩下制動踏板初期的力線性度較好。
圖5為制動踏板力與制動減速度的關系。選用減速度在5~8 m/s2范圍內的制動踏板力和減速度計算制動踏板末期的力線性度。計算方法與初期力線性度相同,求得圖5中I車、J車的末期制動踏板力線性度分別為0.9 998和0.8 767。分析結果可以得出I車在踩下制動踏板末期的力線性度較好。
選用踏板行程大于5 mm至減速度到達4 m/s2范圍內的制動踏板行程和減速度計算線性度,如式(2)。
[R2=S?A-SAn2S2-S2nA2-A2n]? ? ? ? ? ? ? ? (2)
式中:S為制動踏板行程。
求得圖6中K車、L車的初期制動踏板行程線性度分別為0.9 888和0.8 004。分析結果可以得出K車在踩下制動踏板初期的行程線性度較好,駕駛員“隨踩隨有”的制動體驗感更好。
圖7為輕微制動測試中車速由50 km/h減速至30 km/h過程中的制動減速度變化。對制動減速度數據進行擬合處理,輕微制動響應時間為從踩下制動踏板開始至平均減速度達到90%所需要的時間。求得圖7中M車、N車的輕微制動響應時間分別為0.09 s和0.64 s,分析結果可以得出M車在輕微踩下制動踏板時的響應較快。
圖8為輕微制動測試中車速由50 km/h減速至30 km/h過程中制動減速度與車速的關系。減速度變化率K的計算公式如式(3)。
[K=Ax50-30-Ax10-5Ax50-30]? ? ? ? ? ? ? ? ? ? (3)
式中:[Ax50-30]為車速由50 km/h減速至30 km/h過程中的平均減速度,[Ax10-5]為車速由10 km/h減速至5 km/h過程中的平均減速度。
求得圖8中O車、P車的減速度變化率分別為5.99%和30.94%,分析結果可以得出O車在輕微踩下制動踏板時的減速度變化率較小,輕微制動時保持總體制動性能一致性的能力較好。
3.3 操縱穩定性
3.3.1 車身側傾度測試
采用 GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]中10.3所述方法。
3.3.2 避障試驗
采用 GB/T 40521.2—2021 《乘用車緊急變線試驗車道 第2部分:避障》[10]中第2部分所述方法。
3.3.3 中心區轉向特性測試
采用 GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]中11.3所述方法。
3.3.4 低速轉向回正性能測試
試驗車輛沿試驗路段以(10±1) km/h車速直線行駛,隨后轉動轉向盤至極限位置,待穩定后迅速松開轉向盤,過程中保持車速不變。
3.3.5 高速轉向回正性能測試
采用 GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]中8.3.2所述方法。
3.3.6 轉向盤轉角階躍輸入試驗
采用 GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]中6.3所述方法,試驗車速為100 km/h,按穩態側向加速度值為4 m/s2,預選轉向盤轉角的位置(輸入角)。
試驗車輛以(100±2) km/h繞圓行駛,達到穩態側向加速度4 m/s2時的轉向盤轉角作為預選轉向盤轉角。車輛以(100±2) km/h的試驗車速直線行駛,在橫擺角速度為(0±0.5)(°)/s的平衡條件下開始,以預先確定的轉向盤轉角幅值對轉向盤進行頻率逐漸增加的連續正弦輸入,頻率由0.2 Hz逐漸增加至3 Hz,時長不少于20 s。試驗過程中保持車速不變。
3.3.8 最小轉彎直徑測試
采用 GB/T 12540—2009《汽車最小轉彎直徑、最小轉彎通道圓直徑和外擺值測量方法》[11]中4.1.1~4.1.3所述方法進行試驗。
3.3.9 轉向盤圈數測試
轉向盤處于中間位置,記下各測量變量的零線。緩慢而均勻地向左轉動測力轉向盤至轉角最大值,再反向轉動測力轉向盤(向右)至轉角最大值,最后(向左)轉動測力轉向盤至中間位置。記錄整個過程中各測量變量的變化。至少進行3次試驗。
3.3.10 部分數據處理結果
圖9~圖14為操縱穩定性部分數據處理結果。圖9為穩態回轉試驗中車身側傾角與側向加速度的關系,采用GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]中10.4所述方法對試驗數據進行處理,車身側傾度為曲線上側向加速度為2 m/s2處的平均斜率。求得圖9中Q車、R車的車身側傾度分別為2.95 (°)/g和6.03 (°)/g,分析結果可以得出Q車在穩態回轉時側傾度較小。
圖10、圖11為側向加速度與轉向盤力矩關系回線組、轉向盤轉角與轉向盤力矩關系回線組。采用GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]中11.4所述方法對試驗數據進行處理,對遲滯回線組進行多項式擬合得到側向加速度遲滯與轉向盤轉角遲滯。求得S車、T車側向加速度遲滯分別為0.25 m/s2、1.70 m/s2,轉向盤轉角遲滯分別為0.38°、9.40°。
圖12中橫擺角速度超調量為橫擺角速度響應第一個峰值超過新新穩態值的部分與初始值之比。
圖13為轉向盤角階躍輸入試驗的側向加速度變化。采用GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]中6.4所述方法對試驗數據進行處理,側向加速度響應時間為側向加速度第一次達到穩態值90%的時間。圖13中2車側向加速度響應時間分別為0.22 s和0.47 s,分析結果可以得出W車轉向響應速度較快。
圖14為掃頻試驗中轉向盤轉角輸入和橫擺角速度響應的幅頻與相頻特性。采用GB/T 6323—2014《汽車操縱穩定性試驗方法》[8]中7.4所述方法對試驗數據進行處理,諧振頻率為幅頻特性諧振峰所對應的頻率。求得圖14中2車輛的諧振頻率分別為1.77 Hz和0.43 Hz。
4 駕控性能指標限值與得分計算方法
4.1 整車駕控性能指標限值
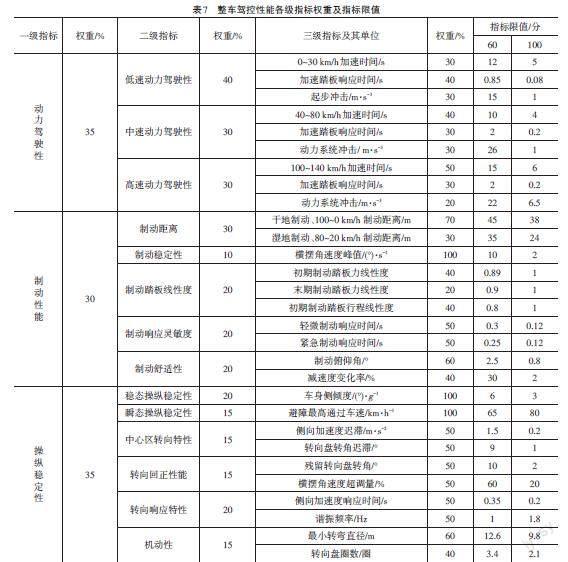
選取不同品牌、級別、能源類型、變速器類型的經典主流車輛做為樣本,按上文試驗方法對樣本進行大量試驗,將得到的三級評價指標數據進行分析處理,所有車輛的評分值符合均值為80分、標準差為10分的正態分布(圖15),則有95.5%的車輛的得分在60~100分之間,從而得到指標限值,如表7所示。
以車身側傾度(圖16)為例,樣本數量為53,由上述方法可計算出得分100的限值K100為3 (°)/g;得分60的限值K60為7 (°)/g。
根據消費者對車輛性能的關注程度,并結合實際場景與工程經驗,劃定駕控性能各級指標權重見表7。
4.2 整車駕控性能評價得分計算方法
將選定的測試指標分為一級指標、二級指標、三級指標(表1)。駕控性能總體得分根據一級指標得分及權重計算得出,保留小數點后1位,如式(4)所示。
[S=i=13Si×ai]? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(4)
式中:S為駕控性能的評價總分,i為一級指標序號,Si和ai分別為序號為主的一級指標得分及權重。
一級指標得分根據二級指標得分及權重計算得出,保留小數點后兩位,如式(5)所示。
[Si=i=1niSij×bij]? ? ? ? ? ? ? ? ? ? ? ? ? ? (5)
式中:j為一級指標內二級指標的序號,ni為第i個一級指標的二級指標數量,[Sij]、[bij]分別為序號為i的一級指標內序號為j的二級指標的得分和對應二級指標的權重。
二級指標得分根據三級指標得分及權重計算得出,計算方法參考一級指標得分計算方法。
三級指標得分需根據試驗測得的指標結果結合表1中60分和100分對應的指標限值,通過線性插值方法計算得出,保留小數點后2位,計算結果大于100分時,按100分計算。
5 測試與評價方法驗證
5.1 客觀測試結果
選取車型A、車型B、車型C進行測試驗證。車型A為某合資品牌兩廂緊湊型轎車;車型B為某合資品牌緊湊型SUV;車型C為某合資品牌中型SUV。3輛車的能源類型分別為:汽油、純電動、油電混合。3車測試結果與各級評分如表8所示。按上述方法計算二級指標評分見表9、一級指標評分以及整車駕控性能總得分見表10。
由表8和圖17中可以看出,車型A作為一款小排量燃油車,其動力駕駛性相比于純電動車、混動車動力駕駛性存在一定的劣勢。其中加速踏板響應時間在低、中、高速加速時都比較長,中、高速加速時沖擊較大。在制動時初期制動踏板線性度比較差。操縱穩定性方面,由于其車身較小、較輕,在避障試驗(瞬態操縱穩定性試驗)中表現一般,其他的操縱穩定性試驗中表現較好。
車型B作為一款純電動車,加速性能、加速響應比較好,但加速沖擊較大。制動性能、操縱穩定性整體表現較好,由于車身較大、質量較大導致制動穩定性、機動性一般,以及中心區轉向特性一般。
車型C作為混合動力汽車,由于低速加速電動機提供動力,高速加速發動機提供動力,所以此款車在動力駕駛性方面優于其他兩款車。由于車身大、車身高、整車質量大,在制動性能與操縱穩定性方面劣于其他兩款車,其中制動距離較長,穩態操縱穩定性、轉向響應以及機動性較差。
5.2 主觀評價驗證
主觀評價驗證采用駕乘性能評價規則中的等級打分評價方法,即十分制,0.25分作為最小分度值。由CCRT主觀評價專家庫中的3位專家對上述3車型進行評價,主觀評價的一級指標得分結果如表11所示。
由表11得出各個性能排序,加速性能:車型C>車型B>車型A;制動性能:車型A>車型B>車型C;操控性能:車型A>車型B>車型C。這與上文駕控性能測試得出的一級指標結果排序一致。
由上文可見,根據試驗結果計算出的得分與汽車的級別、能源類型等均存在聯系,并與主觀評價結果一致。所以本文中介紹的整車駕控性能測試評價方法是準確的、可行的。
6 結束語
本文基于中國消費者的出行場景提出了一種客觀的、科學的整車駕控性能測試評價方法。此方法實現了主觀評價與客觀評價的融合,基本覆蓋了消費者使用場景中的關鍵性指標,非常貼切消費者日常駕駛時的感受,并且提出了一種帶有權重與標準限值的評分方法,可以更直觀地反映日常駕車場景中整車性能的優劣。
汽車企業在新車型開發過程中,可采用本文中提到的測評工況以及評分方法對開發或驗證階段的工程樣車進行整車駕控性能的策略標定及驗證測評,達到整車開發目標的定位。進而推動產品的技術升級,最終提高消費者的出行品質。
參 考 文 獻
[1] 余超, 張紹海, 閆永佳. 汽車駕控性用戶體驗評價方法研究[J]. 時代汽車, 2021(24): 196-198.
[2] 馬健君, 趙禮輝, 李通, 等. 基于用戶行駛需求的輕客整車性能評價[J]. 機械強度, 2019(1): 91-97.
[3] 黃偉, 劉海江, 李敏, 等. 車輛起步工況駕駛性品質評價方法研究[J]. 汽車工程, 2018(11): 1324-1329.
[4] 吳延鵬, 徐赟. 制動踏板感覺試驗淺析[J]. 汽車實用技術, 2021(22): 125-128.
[5] 中華人民共和國國家質量監督檢驗檢疫總局, 中國國家標準化管理委員會. 汽車加速性能試驗方法:GB/T 12543—2009 [S]. 北京: 中國標準出版社, 2009.
[6] 中華人民共和國國家質量監督檢驗檢疫總局, 中國國家標準化管理委員會.乘用車制動系統技術要求及試驗方法:GB 21670—2008[S]. 北京: 中國標準出版社, 2008.
[7] 鐘凡. 整車操縱穩定性主客觀評價一致性研究[D]. 長沙: 湖南大學, 2019.
[8] 中華人民共和國國家質量監督檢驗檢疫總局, 中國國家標準化管理委員會.汽車操縱穩定性試驗方法:GB/T 6323—2014 [S]. 北京: 中國標準出版社, 2014.
[9] 中華人民共和國國家質量監督檢驗檢疫總局, 中國國家標準化管理委員會. 轎車輪胎濕路面相對抓著性能試驗方法:GB/T 21910—2017[S]. 北京: 中國標準出版社, 2017.
[10] 國家市場監督管理總局, 中國國家標準化管理委員會. 乘用車緊急變線試驗車道 第2部分:避障GB/T 40521.2—2021[S]. 北京: 中國標準出版社, 2021.
[11] 中華人民共和國國家質量監督檢驗檢疫總局, 中國國家標準化管理委員會.汽車最小轉彎直徑、最小轉彎通道圓直徑和外擺值測量方法: GB/T 12540—2009 [S]. 北京: 中國標準出版社, 2009
(責任編輯 梵鈴)