一種高精度無人機編隊純方位無源定位方法
2024-04-09 10:51:07劉高峰臧秋艷李燕珊胡媚
科技創新與應用 2024年10期
劉高峰 臧秋艷 李燕珊 胡媚

摘? 要:無人機已廣泛應用于軍事和民用領域,無人機編隊定位和隊型調整是研究前沿熱點,目前需提高現有方法的定位精度和魯棒性。針對現存問題,建立三級定位和四級定位的無人機編隊定位數學規劃模型,利用最小二乘法求出近似解,并建立多步決策模型逐漸調整無人機位置,實現無人機編隊有效隊型調整。仿真實驗表明所提方法的定位精度高且魯棒性強。
關鍵詞:數學規劃模型;最小二乘法;魯棒性分析;多步決策;無源定位
中圖分類號:V279? ? ? ? 文獻標志碼:A? ? ? ? ? 文章編號:2095-2945(2024)10-0143-04
Abstract: Unmanned aerial vehicles (UAVs) have been widely used in military and civil fields. Formation positioning and formation adjustment of UAVs are hot topics in the research field. The positioning accuracy and robustness of existing methods should be improved. Aiming at the existing problems, a mathematical planning model of UAV formation positioning for three-aircraft positioning and four-level positioning was established. The least square method was used to get the approximate solution, and a multi-step decision model was established to gradually adjust the position of UAV formation to achieve effective formation adjustment. Simulation results show that the proposed method has high positioning accuracy and strong robustness.
Keywords: mathematical programming model; least square method; robustness analysis; multi-step decision-making; passive location
隨著無人機的數量指數級增長,避障技術的成熟程度偏低及無人機通信系統干擾的問題,將日漸突出并且受地形、天氣等客觀條件影響,導航衛星信號易干擾,定位精度有待提高[1-2]。無人機集群在遂行編隊飛行時,為避免外界干擾,需使其盡可能保持電磁靜默,少向外發射電磁波信號。現有無人機的民航無線電干擾源定位、四旋翼飛行器的多信號源定位等方法定位,但是方法較復雜,魯棒性較低[3-5]。為保持無人機集群在遂行編隊時的隊形,擬采用純方位無源定位的方法調整無人機的位置,即由編隊中某幾架無人機發射信號、其余無人機被動接收信號,從中提取出方向信息進行定位,來調整無人機的位置[6-8]。
1? 問題描述
編隊由10架無人機組成,形成一個圓形編隊,其中9架無人機(編號FY01—FY09)均勻分布在某一圓周上,另1架無人機(編號FY00)位于圓心。無人機基于自身感知的高度信息,均保持在同一個高度上飛行。
問題一:位于圓心的無人機(FY00)和編隊中任意2架無人機(已知它們的位置無偏差和編號)發射信號,其余位置略有偏差的無人機被動接收信號。建立被動接收信號無人機的定位模型。
問題二:已知某位置略有偏差的無人機除了接收到編號為FY00和FY01的無人機發射的信號,還接收到編隊中若干編號未知的無人機發射的信號。假設發射信號的無人機位置無偏差,那么除已知的FY00和FY01外,要求還需要幾架無人機發射信號,才能得到所有無人機的有效定位。
問題三:已知1架無人機位于圓心,另9架無人機均勻分布在半徑為100 m的圓周上。初始時無人機的位置略有偏差,我們每次選擇編號為FY00的無人機和圓周上最多3架無人機遂行發射信號,其余無人機根據接收到的方向信息,使它們調整到理想位置上(每次調整的時間忽略不計),即使得9架無人機最終均勻分布在這個半徑為100 m的圓周上,請給出合理的調整方案。又已知無人機的實際位置數據,僅根據接收到的方向信息來調整無人機的位置,請給出具體的無人機位置調整方案。
2? 符號說明
?茁1為射線CA、CO的夾角;?茁2為射線CO、CB的夾角;?茁3為射線CA、CB的夾角;d1為發射信號無人機BC的距離,單位為m;d2為發射信號無人機AC的距離,單位為m;d3為發射信號無人機AB的距離,單位為m;I為對應無人機編號;xi為編號為i的無人機的橫坐標;yi為編號為i的無人機的橫坐標;θi為對應編號下無人機與x軸的夾角;■k為當前估計坐標;■k-1為上一次的估計坐標;kk為特定系數;zk為當前的實際坐標;Sn為狀態;zn為決策。
3? 模型的建立與仿真驗證
3.1? 問題一 模型的建立與仿真驗證
3.1.1? 模型的建立
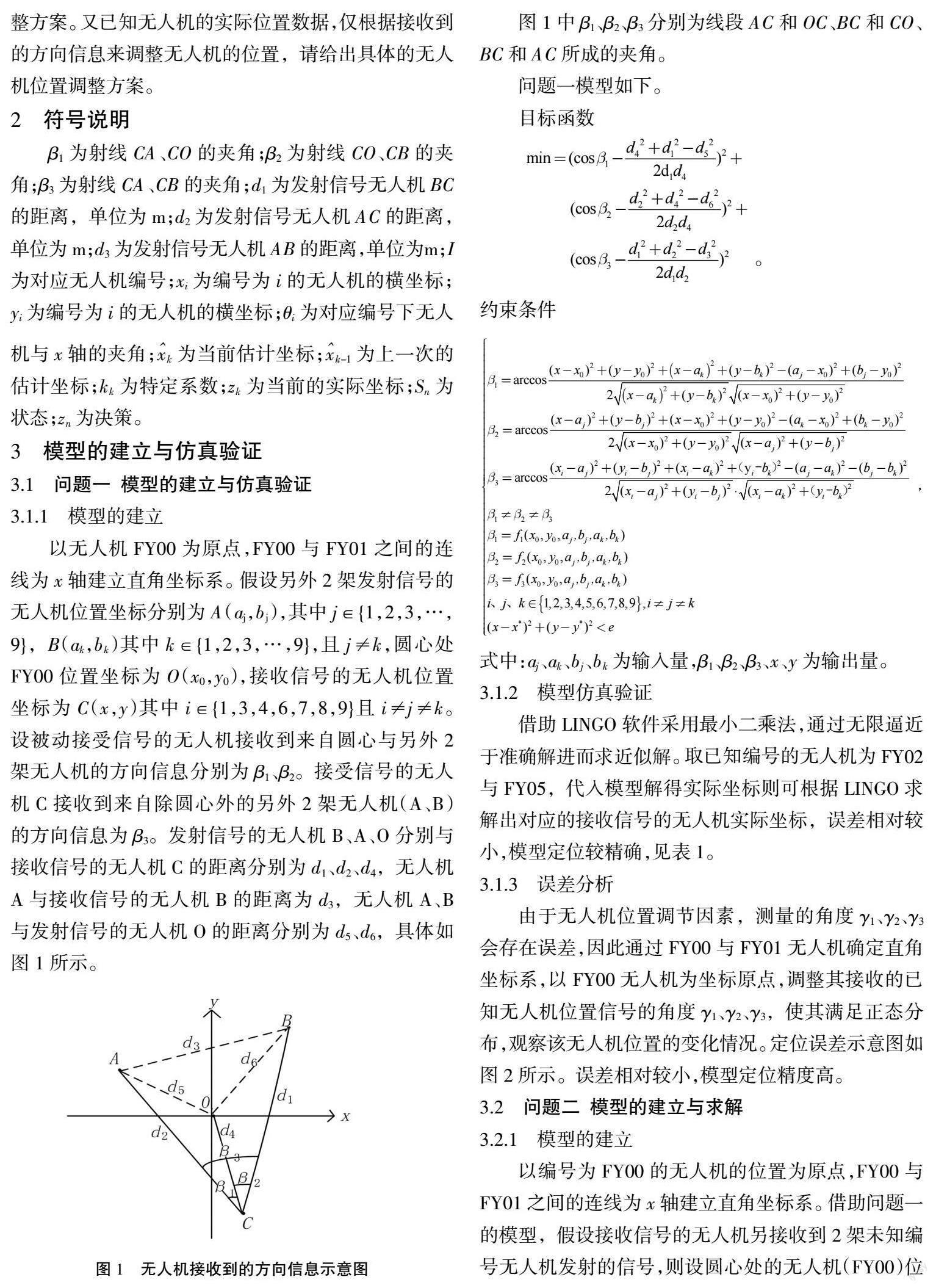
以無人機FY00為原點,FY00與FY01之間的連線為x軸建立直角坐標系。假設另外2架發射信號的無人機位置坐標分別為A(aj,bj),其中j∈{1,2,3,…,9}, B(ak,bk)其中k∈{1,2,3,…,9},且j≠k,圓心處FY00位置坐標為O(x0,y0),接收信號的無人機位置坐標為C(x,y)其中i∈{1,3,4,6,7,8,9}且i≠j≠k。設被動接受信號的無人機接收到來自圓心與另外2架無人機的方向信息分別為?茁1、?茁2。接受信號的無人機C接收到來自除圓心外的另外2架無人機(A、B)的方向信息為?茁3。發射信號的無人機B、A、O分別與接收信號的無人機C的距離分別為d1、d2、d4,無人機A與接收信號的無人機B的距離為d3,無人機A、B與發射信號的無人機O的距離分別為d5、d6,具體如圖1所示。
圖1? 無人機接收到的方向信息示意圖
圖1中?茁1、?茁2、?茁3分別為線段AC和OC、BC和CO、BC和AC所成的夾角。
問題一模型如下。
目標函數
約束條件
式中:aj、ak、bj、bk為輸入量,?茁1、?茁2、?茁3、x、y為輸出量。
3.1.2? 模型仿真驗證
借助LINGO軟件采用最小二乘法,通過無限逼近于準確解進而求近似解。取已知編號的無人機為FY02與FY05,代入模型解得實際坐標則可根據LINGO求解出對應的接收信號的無人機實際坐標,誤差相對較小,模型定位較精確,見表1。
3.1.3? 誤差分析
由于無人機位置調節因素,測量的角度?酌1、?酌2、?酌3會存在誤差,因此通過FY00與FY01無人機確定直角坐標系,以FY00無人機為坐標原點,調整其接收的已知無人機位置信號的角度?酌1、?酌2、?酌3,使其滿足正態分布,觀察該無人機位置的變化情況。定位誤差示意圖如圖2所示。誤差相對較小,模型定位精度高。
3.2? 問題二 模型的建立與求解
3.2.1? 模型的建立
以編號為FY00的無人機的位置為原點,FY00與FY01之間的連線為x軸建立直角坐標系。借助問題一的模型,假設接收信號的無人機另接收到2架未知編號無人機發射的信號,則設圓心處的無人機(FY00)位置坐標為O(x0,y0),FY01無人機位置坐標為E(x1,y1);接收信號的無人機實際位置坐標為H(xi,yi);理想位置坐標為H(xi*,yi*),其中i為飛機編號且i∈{2,3,4,5,6,7,8,9};另外2架發射信號的無人機位置坐標分別為F(xh,yh),G(xh′,yh′),其中h與飛機編號i存在h=s(i)的關系,且h∈{2,3,4,5,6,7,8,9}且i≠h′≠h。
圖2? 定位誤差示意圖
建立數學規劃模型,建立如下目標函數和約束條件進行模型求解。
目標函數為
因此約束條件為
式中:x1、y1、xh、yh、x0、y0為輸入量,?茁1h、?茁2h、?茁3h、xh,yh為輸出量。
3.2.2? 模型仿真驗證
目標函數和相應的約束條件,在MATLAB中固定另外2架未知編號的發射信號的無人機,并進行定位后,當2個位置坐標無限接近時,在不同角度誤差情況下得到定位坐標、定位誤差(表2),通過分析發現定位誤差很小,模型定位精度高,魯棒性強。
3.3 問題三 模型的建立與求解
3.3.1? 模型的建立
已知所有無人機的實際位置,選取編號0、1、2這3架無人機,假設編號2的無人機處在理想位置上,求出接收信號的無人機接收到來自編號0分別與編號1、2無人機的方向信息為?棕1、?棕2,聯系商人渡河的決策集合模型來解決此問題。
無人機發射信號后需要調整的無人機初始位置記為Sn=(xn,yn),將成功調整到理想位置后的狀態集合定義為允許狀態集合,無人機調整到理想位置為zn=(un,vn),將其定義為決策。研究發現本文定義的狀態Sn和決策zn是存在聯系的,即狀態轉移率:Sn+1=Sn+(-1)nzn。因此可以抽象為多步決策模型。求zn∈D(n=1,2,…,m),使狀態Sn∈S按照轉移率變化,初始狀態S1經有限m步后到達狀態Sm+1求得結果。建立如下約束條件進行模型求解。
約束條件為
式中:?棕1、?棕2、?棕3、aj、ak、bj、bk為輸入量,x、y為輸出量。
3.3.2? 無人機動態調整算法
第一步:首先除確定編號0和編號1無人機外,還需由在圓周的最多3架無人機發射信號,假設取2、5、8號無人機,通過與問題二相似的模型利用LINGO去尋找接收信號的無人機的實際位置。
第二步:通過多步決策模型,求出z1,z2,…,zn,使接收信號的無人機根據決策變量zn,多次調整方向,直到調整到與理想位置較為接近時達到預期。
4? 結論
本文通過建立直角坐標系的方法合理利用幾何圖形計算無人機的位置,在無人機的位置關系的求解方面較為精確。主要優點如下;
1)基于二維分析的模型,與無源定位實際十分吻合,經過魯棒性分析得到的模型穩定性好、適用范圍廣;
2)模型充分考慮了所有對應編號的無人機的理想位置坐標與實際坐標之間的關系,模型較為精準。
后續值得研究:在實際飛行中,無人機集群也可以是其他編隊隊形,例如錐形編隊隊形,仍考慮從純方位無源定位入手,設計無人機位置調整方案。也可以結合天氣變化情況,構建屬于不同天氣下精準的無人機定位模型。
參考文獻:
[1] 檀立剛,駱明偉,李捷,等.無人機光電設備對地目標單站無源定位方法[J].應用光學,2022,43(4):599-610.
[2] 熊仁和.基于多無人機的民航無線電干擾源定位方法研究[D].廣漢:中國民用航空飛行學院,2022.
[3] 楊和穩.人工智能算法研究與應用[M].南京:南京東南大學出版社,2021.
[4] 侯月婷.基于最小二乘法的交變溫度下晶振頻率漂移預測算
法[D].天津:河北工業大學,2022.
[5] 馬文濤.無網格法理論及MATLAB程序[M].銀川:寧夏人民出版社,2019.
[6] 林維雨.基于四旋翼飛行器的多信號源定位方法研究[D].杭州:杭州電子科技大學,2022.
[7] 韓宇飛.基于TDOA的無人機無線定位算法研究[D].呼和浩特:內蒙古大學,2022.
[8] 蔣子陽.基于深度強化學習的路徑規劃方法研究[D].濟南:山東大學,2020.