計及電動汽車移動儲能動態電價的微電網優化調度研究
2024-04-03 10:11:04陳洪亮徐海博孫瑞雪
東北電力技術 2024年3期
關鍵詞:成本
陳洪亮,徐海博,孫瑞雪
(1.沈陽卓立新能源技術有限公司,遼寧 沈陽 110027;2.國網遼寧省電力有限公司實業分公司,遼寧 沈陽 110059)
0 引言
“雙碳”目標下,利用電動汽車(electric vehicle,EV)移動儲能特性可提高微電網靈活性。EV作為一種移動儲能裝置,若進行有效控制,參與微電網的優化調度,與新能源協調運行,可提高微電網穩定性與經濟性[1-2]。因此,亟需對考慮EV的微電網優化調度方法進行深入研究。
目前,關于EV接入微電網穩定性問題,相關學者做了一定研究。文獻[3]建立以鋰電池作為儲能裝置的全壽命周期成本模型,未利用EV集群提高微電網運行水平。文獻[4]針對新能源出力的波動性提出EV參與度和效用函數最大的EV運行模型,設計了一種基于一致性理論的EV充放電功率分布式控制方法。文獻[5]提出一種風光儲多能互補微電網系統日前調度優化模型。文獻[6]建立總運行費用與總網損最小的微電網多目標隨機動態優化調度模型。文獻[7-8]建立考慮熱電聯產機組及環境成本的微電網經濟調度模型,通過蓄電池儲能降低微電網的綜合運行成本。但上述文獻未考慮將EV作為儲能裝置研究其充放電雙向行為對微電網經濟調度的影響。
針對上述內容,以下文獻通過電價引導EV參與微電網儲能并激勵用戶參與微電網調度。文獻[9]中EV充電電價采用居民用電峰谷分時電價,激勵更多用戶參與微電網調度,但目標函數中未考慮EV電池損失成本。文獻[10]通過研究EV用戶對電價變化的需求響應,提出引導EV充電的最優峰谷電價定價方案,但會出現反調峰現象。文獻[11]分析分時電價對充電EV負荷轉移概率的影響,均未考慮EV用戶成本、電池損失成本。文獻[12]根據電網預測調度目標提出考慮EV用戶期望的定價策略,用戶可按照自身需求選擇充電時段。以上文獻所提定價方法均基于EV用戶需求響應及用戶成本,未考慮新能源出力對電價的影響。
鑒于上述問題,首先提出一種在動態電價機制下考慮EV移動儲能的微電網調度模型。所提EV動態電價機制根據新能源預測功率得出各時段的充電電價,引導EV參與微電網調度。其次,建立考慮環境成本、微電網運行成本和EV用戶成本最低目標的經濟調度模型。最后,通過與傳統無序充電對比分析互動,所提考慮EV移動儲能的動態電價機制提升了微電網與EV用戶經濟效益,驗證所提方法的有效性。
1 電動汽車接入微電網的調度結構
圖1為微電網結構,微電網包含微電網能量管理系統、微電源及常規負荷,其中微電源由柴油發電機(diesel generators,DG)、風電機組(wind turbines,WT)、光伏發電系統(photovoltaic panels,PV)組成。EV接入微電網可減小對主網的電力需求,也可將EV作為移動儲能來平衡微電網與常規負荷間的電力。
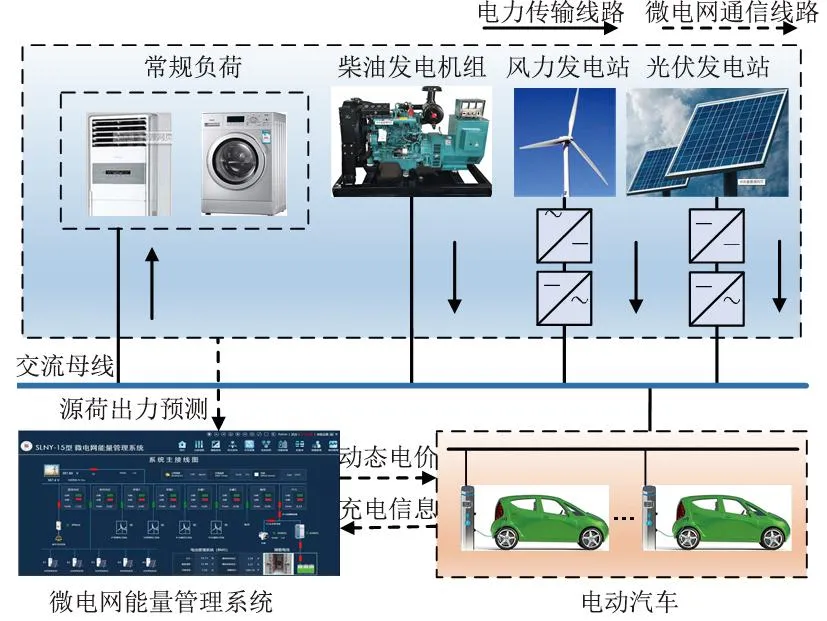
圖1 微電網結構
微電網能量管理系統根據EV用戶接入時間、電池信息及未來24 h源荷出力預測數據,向EV用戶發布充電電價信息等待用戶響應,參與微電網儲能調節,并安排各微電源的出力。當微電網內部發電量無法消納或供電不足時,微電網能量管理系統根據主網的購售電價通過聯絡線與主網進行能量交換。
a.PV模型
光伏發電輸出功率表示為
(1)
(2)
式中:PPV為PV實際出力;PPV,STC為標準測試條件下最大功率;R、RSTC分別為實際光照強度值、標準測試條件下光照強度值;γ為功率溫度系數;Ta、Tr、Tamb、TNOC分別為光伏單元實際溫度、參照溫度、環境溫度和正常條件下光伏單元溫度。
b.WT模型
風電機組輸出功率為[13]
(3)
式中:PWT、PWT_rate分別為WT實際功率和額定功率;vci、vco、vr分別為機組切入風速、切出風速、額定風速,分別取3 m/s、25 m/s、14 m/s。
c.DG模型
柴油發電機的燃料消耗量是其輸出功率的線性函數,即:
F=F0×PDG_rate+F1×PDG
(4)
式中:F為燃料消耗率;F0為截距系數;F1為斜率;PDG_rate為DG的額定功率;PDG為DG的實際功率。
d.EV動力電池充放電功率模型
EV充放電模型如下:
(5)
e.基于蒙特卡洛的EV無序充電模型
單個EV的充電行為由車主決定,具有較強的隨機性。在大數據背景下,EV數據可經分析、歸納近似滿足相應的概率分布,如式(6)、式(7)所示。EV出行數據來自美國交通部對全美車輛出行調查數據[13]。
EV起止充電時間服從正態分布,概率密度函數如式(6)所示。
(6)
式中:μs取17.6;σs取3.4。
日行駛距離近似服從對數正態分布,概率密度函數為
(7)
式中:μd取3.2;σd取0.88。
EV充電時長為
(8)
式中:TC為充電時間;S為日行駛距離;W100為耗電量;PC為充電功率。
通過蒙特卡洛法抽取每輛EV起始充電時間及日行駛距離得出每輛EV的充電時長,計算單輛EV充電負荷,之后對充電負荷疊加,得到所有充電負荷。將1天分為24個時段,間隔1 h,可得出N輛EV每時段對應的充電負荷為
(9)
式中:Pj為第j個時段總充電負荷;N為EV數量;Pn,j為第n輛EV在第j個時段充電負荷。
采用蒙特卡洛法抽取單位EV起始充電時間、日行駛距離的計算方法,其流程如圖2所示。
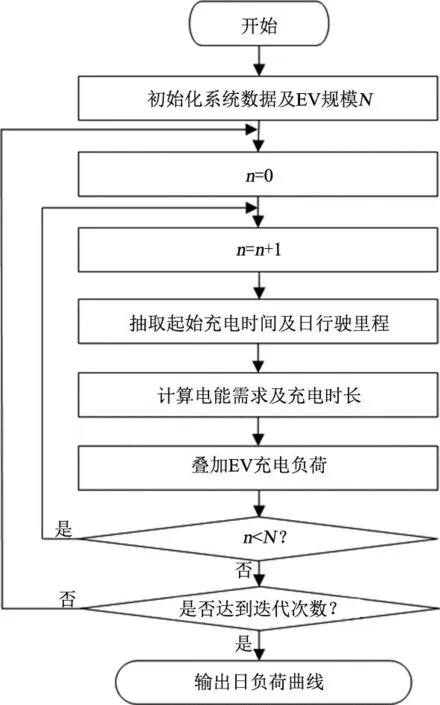
圖2 基于蒙特卡洛模擬的EV充電負荷計算流程
對50輛EV進行100次模擬得到EV無序充電功率負荷曲線,如圖3所示。
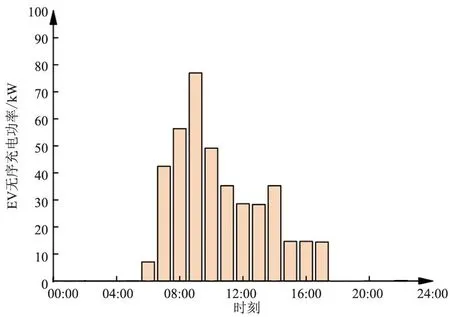
圖3 EV無序充電功率
2 EV有序充電控制策略
本文通過電價激勵控制EV有序充電,充分開發EV電池儲能潛力,提出一種根據新能源出力大小制定EV動態充電電價的方法。文中所提考慮EV移動儲能的動態充電電價同時兼顧EV用戶成本與新能源出力大小,根據24 h內風電、光伏出力預測值與平均值計算EV各時段充電電價。文獻[14-15]將風電、光伏出力劃分為3個階段,分別對應3個EV充電電價階段(高、平、低),通過計算得到3個出力階段的最大值、最小值相對平均值的波動范圍為30%左右,由于文獻[15]典型日出力數據與實際整體出力存在誤差,文中風電、光伏出力波動范圍取25%。風電、光伏出力超過其平均值的125%,EV充電電價低;低于其平均值的75%,EV充電電價高;在兩者之間為平電價,高、低電價分別基于平電價上、下浮動60%。EV基準充電電價s0為居民用電三級電價,高、低、平充電電價階段分別為1.253元/kWh、0.335元/kWh、0.781元/kWh。為便于計算,文中s0取0.8元/kWh,高、低、平分時電價取1.28元/kWh、0.8元/kWh、0.32元/kWh。
EV充電電價與風電、光伏預測功率關系如下:
(10)
(11)

利用各時段充電電價差將EV充電負荷轉移到風電、光伏出力大的時段,具體流程見圖4。
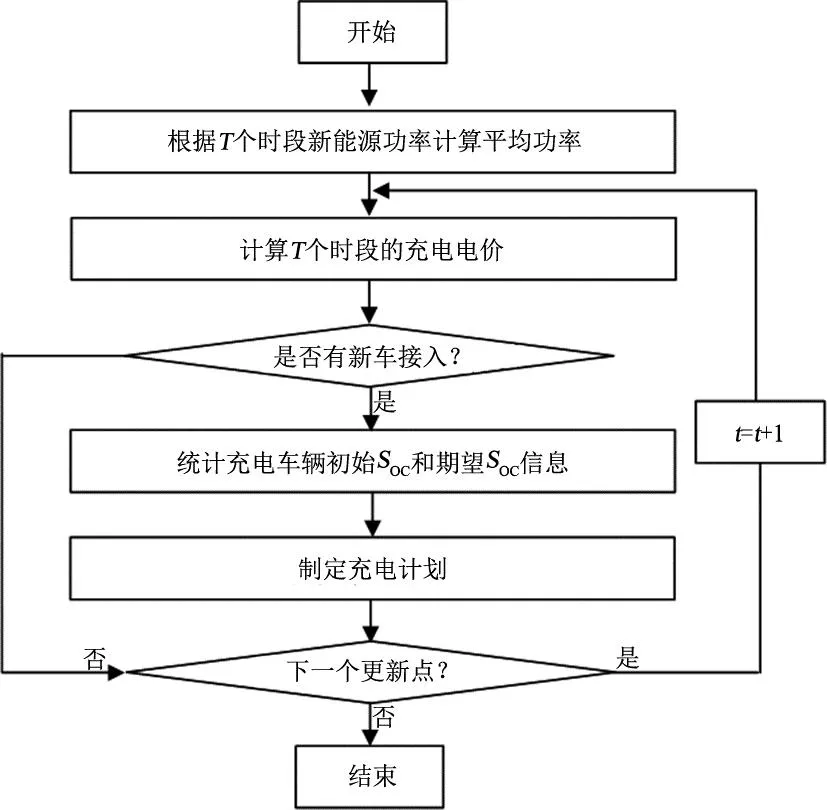
圖4 動態充電電價流程
3 調度模型
3.1 目標函數
微電網綜合運行成本主要考慮微電源運行成本、DG機組的燃料成本、電能交互成本、新能源發電補貼費用、環境成本、EV損失成本和調度成本,其優化調度模型的目標函數如下:
minf=min(CWT,t+CPV,t+CDG,t+CES,t+CS,t+
CSUB,t+CEV,t+CH,t)
(12)
式中:f為微電網綜合運行成本;CWT,t為WT在t時刻運行成本;CPV,t為PV在t時刻運行成本;CDG,t為DG在t時刻運行成本;CES,t為EV損耗成本;CS,t為電能交互成本;CSUB,t為新能源發電補貼費用;CEV,t為EV調度成本;CH,t為環境成本。
a.微電源運行成本
CWT,t=MWT,t+DWT,t
(13)
CPV,t=MPV,t+DPV,t
(14)
CDG,t=MDG,t+DDG,t+Cfule
(15)
式中:MWT,t為WT在t時刻維修成本;MPV,t為PV在t時刻維修成本;MDG,t為DG在t時刻維修成本;DWT,t為WT在t時刻折舊費用;DPV,t為PV在t時刻折舊費用;DDG,t為DG在t時刻折舊費用;Cfule為柴油發電機燃料成本。
(16)
(17)
式中:Km,i為微電源單位運行維修費用;PWT,t為WT在t時刻出力;PPV,t為PV在t時刻出力;PDG,t為DG在t時刻出力;cins,t為微電源i的安裝成本;Prate,t為微電源i的額定功率;fe,i為微電源i的容量因子;d為折舊系數;m為微電源的使用壽命。
b.DG燃料成本
柴油發電機的燃料成本數學表達式為
(18)
式中:α、β、γ為柴油發電機的燃料成本系數,取α=6,β=0.12,γ=8.5×10-4。
c.電能交互成本
微電網與主網進行電能交換時產生的費用由微電網購電成本和售電收益組成。當微電源出力不能滿足負荷需求時,由于微電網向主網購電價格高,此時微電網系統通過動態充電電價引導EV放電;當EV放電不能滿足負荷需求時,此時從主網購電。反之,當微電源出力除了滿足自身負荷需求外仍有剩余,可引導EV充電或在售電價格高時向主網售電。與主網電能交互成本如下:
CS,t=Cbuy,t+Csell,t
(19)
(20)
式中:Pbuy,t、Psell,t分別為微電網向主網購、售電功率;cbuy,t、csell,t分別為微電網向主網購、售電價。
d.新能源發電補貼費用
Csub,t=csub(PWT,t+PPV,t)
(21)
式中:csub為分布式新能源發電補貼單價,取0.01元/kWh。
e.環境成本
常規發電污染物治理費用計為環境成本如下:
CH,t=PDG,t(aDGCO2σCO2+aDGSO2σSO2+aDGNOxσNOx)
(22)
式中:aDGCO2為柴油發電機CO2排放量;aDGSO2為柴油發電機SO2排放量;aDGNOx為柴油發電機NOx排放量;σCO2為CO2治理費用;σSO2為SO2治理費用;σNOx為NOx治理費用。
f.EV調度成本
充放電響應采用一定比例的充放電電價進行補償,計算方式如下:
CEV,t=CEV_ch,t+CEV_dis,t
(23)
(24)
式中:CEV_ch,t、CEV_dis,t分別為t時刻EV充電和放電的補償成本;s(t)為EV充電電價;α1、β1分別為微電網對EV充電和放電的補償系數,分別取0.2和0.5。
g.EV電池損耗成本
將EV電池損耗成本與折舊成本計入EV充放電的損耗成本中,計算方式如下:
CES,t=CEL+CEM
(25)
(26)
式中:CEL、CEM分別為EV放電時損失成本和EV電池折舊成本;KEV為車輛蓄電池的折舊系數;PEVd,j為第j輛車的放電功率。
3.2 約束條件
a.功率平衡約束
微電網功率平衡約束如下:
PWT,t+PPV,t+PDG,t+Pgrid,t=Pload,t+PEV,t
(27)
式中:PWT,t、PPV,t、Pload,t、PEV,t分別為t時段風電出力、光伏出力、常規負荷及EV充放電功率。
b.EV充放電功率及荷電狀態約束
EV充放電時功率及荷電狀態約束如下:
(28)
λEVcλEVd=0
(29)
SOC,min≤SOC(t)≤SOC,max
(30)
EV充放電狀態有3種情況:充電狀態(PEVc,t>0,PEVd,t=0);放電狀態(PEVc,t=0,PEVd,t>0);閑置狀態(PEVc,t=0,PEVd,t=0)。引入狀態變量λEVc、λEVd表示EV是否參與充放電(0或1)。
c.聯絡線功率約束
聯絡線功率約束表達式如下:
(31)
d.分布式電源出力上、下限約束
各分布式電源出力滿足以下條件:
Pi,min≤Pi,t≤Pi,max
(32)
式中:Pi,t為分布式電源i發電功率;Pi,max、Pi,min分別為分布式電源i出力上、下限。
e.DG運行功率約束
DG運行功率約束條件如下:

(33)
式中:Lmin為DG最小負載率。
4 仿真結果分析
4.1 試驗數據
仿真算例中PV、WT均運行于最大功率跟蹤模式,圖5為微電網中風電、光伏出力及負荷需求預測數據。DG的環境補償成本及排放系數如表1所示,各微電源參數如表2所示,微電網與主網交易電價如表3所示。EV容量為24 kWh,充放電功率均為3 kW,充放電效率μch、μdis均為0.95。本文通過YALMIP建立數學模型,并利用GUROBI求解優化問題。
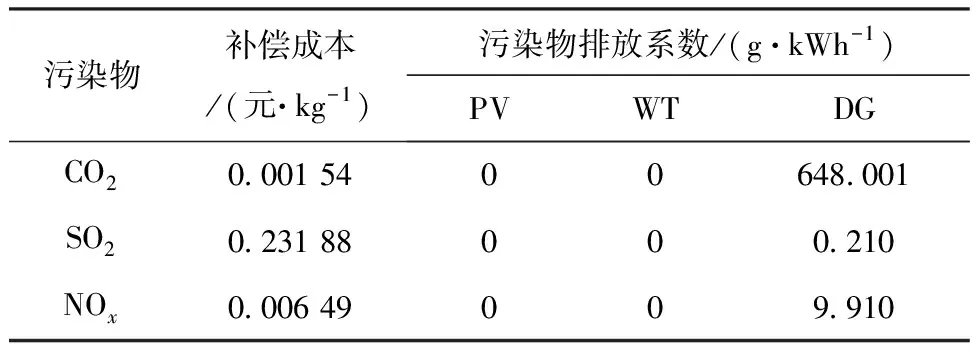
表1 環境補償成本及排放系數
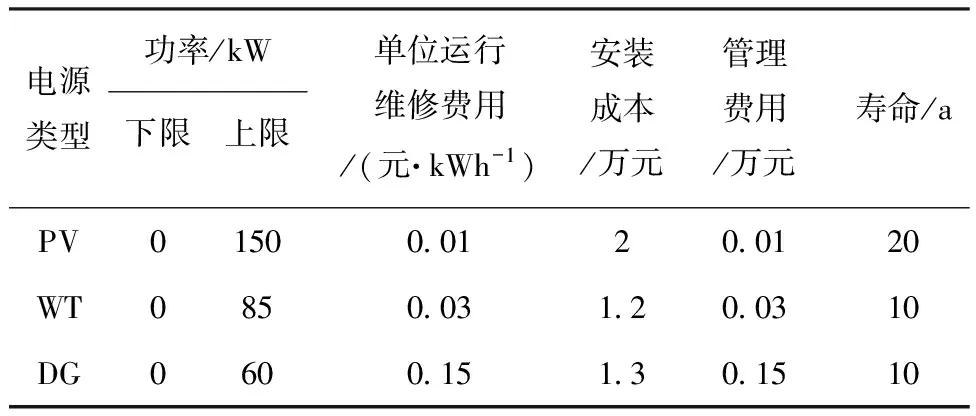
表2 微電源參數
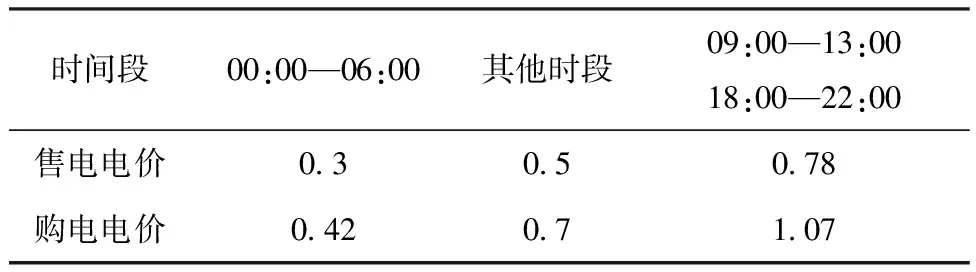
表3 微電網與主網交易電價 單位:元/kWh
4.2 結果分析
微電網調度模型求解結果如圖6—圖9所示。基于各時段風電、光伏功率預測值與平均值,根據式(10)、式(11)計算EV動態充電電價,如圖6所示。結合圖3、圖5可知,在微電網嚴重缺少電源功率時(17:00—21:00),光伏出力基本為零,風電出力不足以滿足負荷需求,微電網中負荷需求基本由DG支撐。此時EV充電負荷將加劇電網調峰負荷,導致系統必須提高DG機組出力滿足EV充電和負荷需求,從而使電網運行成本與環境成本增加,因此,此階段制定EV充電電價較高為1.28元/h。在微電網風電、光伏出力富余時(00:00—07:00、08:00—16:00),負荷水平較低,EV可減少棄風、棄光現象,DG機組只需維持相對較低出力即可滿足負荷需求,因此,此階段EV充電電價制定為0.32元/kWh。
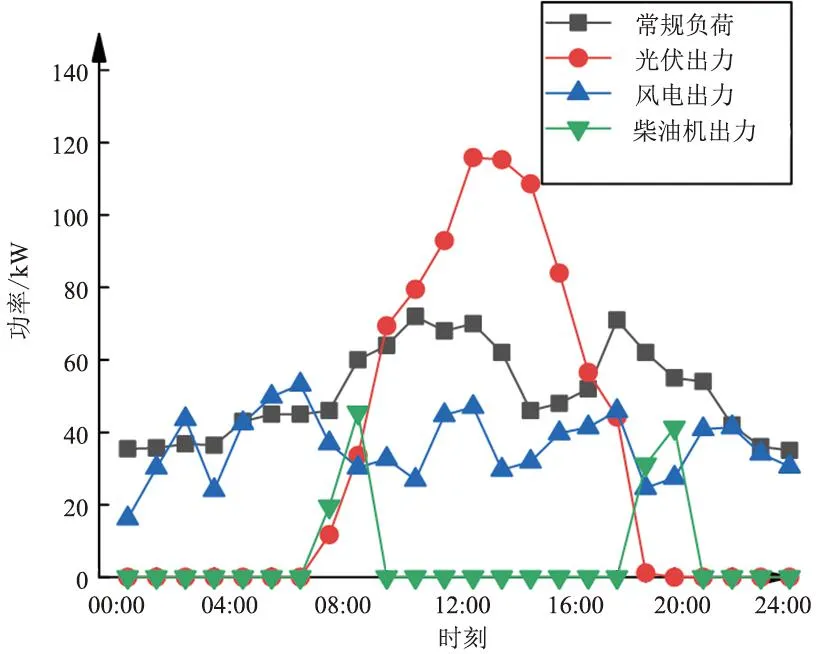
圖5 微電網各機組出力曲線
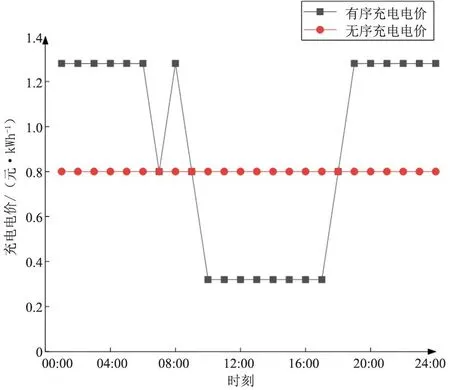
圖6 動態充電電價
圖7為動態電價引導下的EV充放電功率曲線。結合風電、光伏出力曲線可知,通過充電電價引導,EV作為移動儲能裝置能夠實現對新能源發電的削峰填谷。在微電網嚴重缺少功率時,EV充電電價維持在1.28元/kWh,激勵EV減少充電功率并增加放電功率,從而減少DG機組出力,不僅能緩解調峰負擔、EV用戶獲得更多經濟收益,還能減小微電網環境成本。在微電網發電功率富余時,EV充電電價維持在0.32元/kWh,此階段多余電功率存儲到EV。圖8為微電網與主網功率交換曲線。在新能源出力或微電網發電功率不足以支撐負荷需求時,通過動態電價引導EV放電或從主網購電滿足功率缺額,從而滿足微電網內部負荷需求。圖9為無序、有序充電棄風棄光曲線,在動態電價引導下EV充電負荷轉移到風電、光伏出力較大時段,增加了風電、光伏利用。
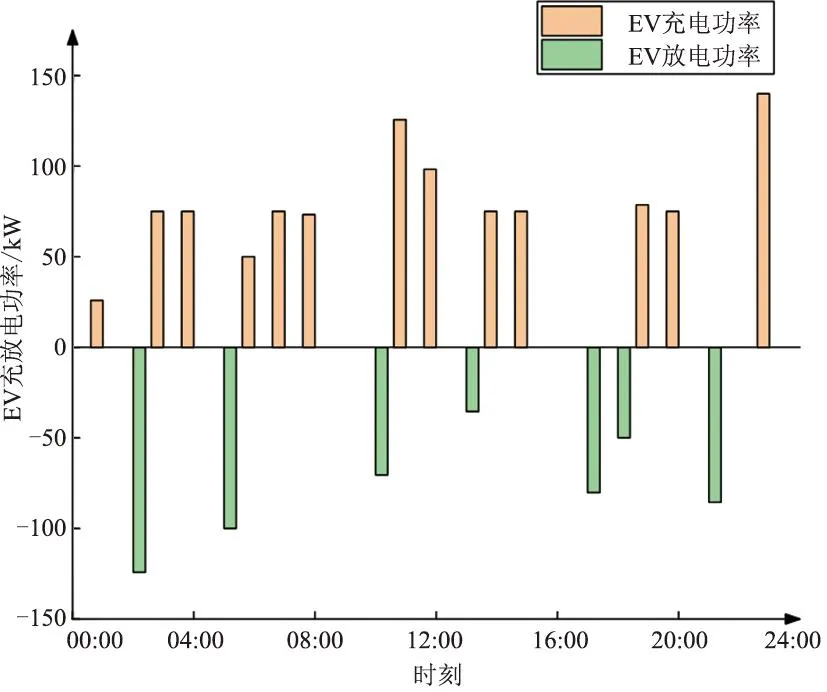
圖7 動態充電電價引導下EV充放電功率曲線
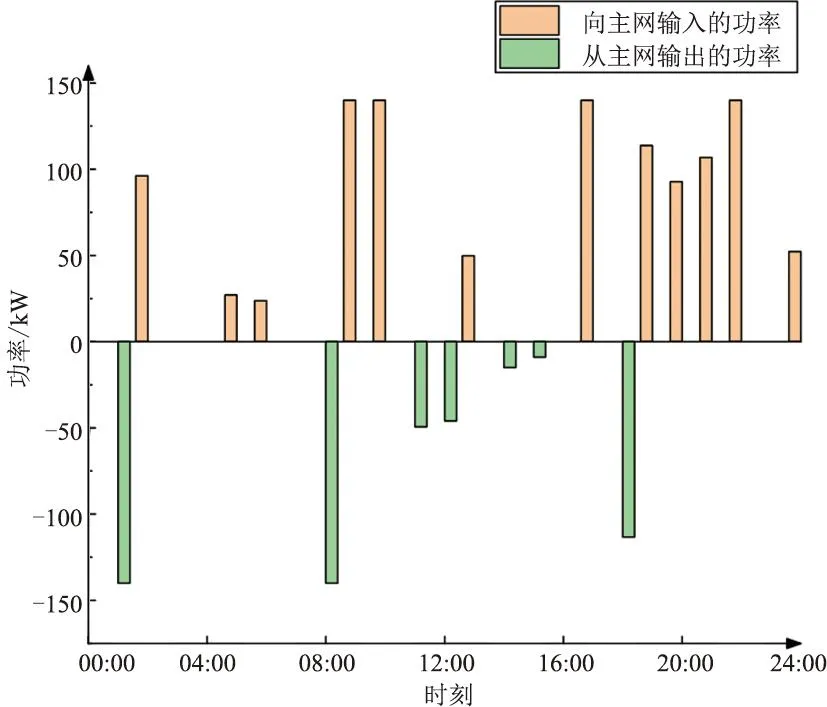
圖8 微電網與主網功率交換曲線
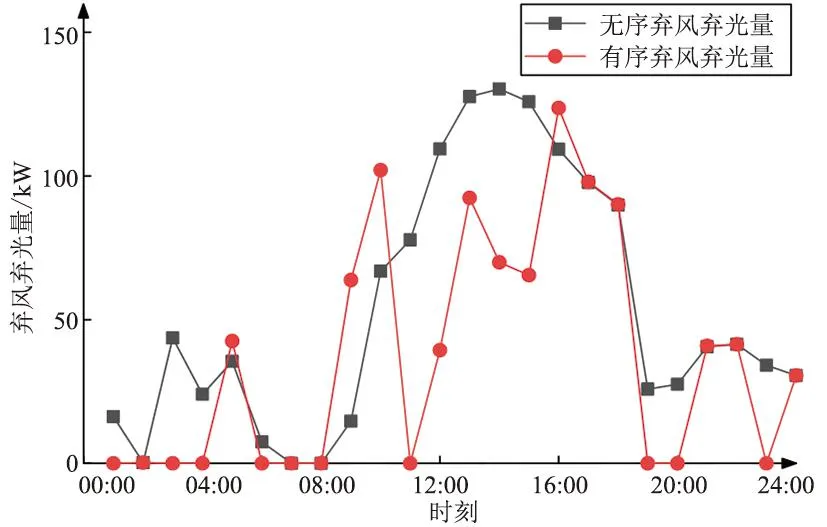
圖9 無序、有序充電棄風棄光曲線
通過表4成本對比可知,所提方法引導EV在電價尖峰期放電,在電價低谷期充電,不僅降低了EV用戶成本,且降低了微電網運行成本及環境成本。微電網總的運行成本降低了16.96%,EV用戶成本降低了46.68%,環境成本降低了30.89%。
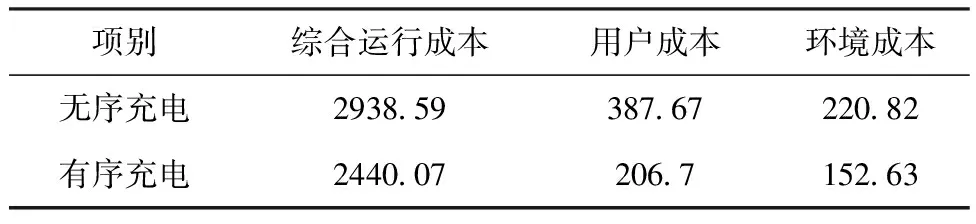
表4 成本對比 單位:元
5 結語
本文提出了在動態電價機制下考慮EV移動儲能的微電網優化調度模型。根據新能源出力大小制定動態充電電價策略,在不影響用戶出行的前提下,能引導EV充電負荷最大化消納風電、光伏,風電、光伏消納率提高了38.69%,同時通過EV儲能減輕了微電網對主網電力需求負擔,有利于提高微電網運行的經濟性。
猜你喜歡
廈門大學學報(哲學社會科學版)(2022年5期)2022-10-11 01:22:46
中國化肥信息(2021年6期)2021-08-21 02:42:16
河南電力(2021年5期)2021-05-29 02:10:00
電影(2018年12期)2018-12-23 02:18:48
特別健康(2018年2期)2018-06-29 06:13:42
領導決策信息(2017年10期)2017-05-17 04:49:02
風能(2015年9期)2015-02-27 10:15:24
私人飛機(2013年10期)2013-12-31 00:00:00
俄羅斯問題研究(2012年1期)2012-03-25 09:54:48
互聯網周刊(2009年14期)2009-08-04 09:37:06