基于EfficientNet編碼器的改進(jìn)UNet模型電阻抗成像算法
2024-04-03 21:06:12萬(wàn)靜李興五高國(guó)忠
電腦知識(shí)與技術(shù) 2024年1期
關(guān)鍵詞:模型
萬(wàn)靜 李興五 高國(guó)忠

關(guān)鍵詞:電阻抗成像;EfficientUNet網(wǎng)絡(luò);圖像重建;深度學(xué)習(xí)
0 引言
電阻抗成像(Electrical Impedance Tomography,EIT) 技術(shù),通過(guò)注入電流和附著在物體表面上的電極陣列來(lái)測(cè)量邊界電極處的感應(yīng)電壓,可視化被測(cè)場(chǎng)域內(nèi)橫截面處電導(dǎo)率分布。EIT技術(shù)具有非侵入性、便攜性、低成本、響應(yīng)快速等技術(shù)優(yōu)點(diǎn)。在過(guò)去的幾十年里,已成為一種被廣泛接受的斷層成像技術(shù),被廣泛應(yīng)用于生物醫(yī)學(xué)成像,如功能性肺成像、乳腺癌癥檢測(cè)和腦成像等,同時(shí)在工業(yè)過(guò)程監(jiān)測(cè)、地球物理勘探、細(xì)胞培養(yǎng)觀察和生物醫(yī)學(xué)診斷等領(lǐng)域有重要的應(yīng)用價(jià)值。
EIT圖像重建本質(zhì)上存在非線性、不確定性和不適定性等問(wèn)題。EIT技術(shù)可分為常規(guī)物理方法和人工智能方法兩大類,大多數(shù)基于常規(guī)物理方法的圖像重建算法通過(guò)最小化二乘誤差和引入對(duì)先驗(yàn)信息進(jìn)行編碼的各種正則化項(xiàng)來(lái)求解近似解。盡管基于物理模型的方法在不斷進(jìn)步,仍然難以準(zhǔn)確預(yù)測(cè)結(jié)構(gòu)分布和電導(dǎo)率值,尤其是對(duì)于多個(gè)目標(biāo)體的情況。近年來(lái),基于人工智能的算法已成為斷層圖像重建的新前沿,預(yù)測(cè)速度快且具有實(shí)時(shí)成像的潛力,為高質(zhì)量EIT 圖像重建帶來(lái)可能。
Fan等人[1]基于數(shù)值低秩特性提出了緊湊型神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),適用于2D和3D問(wèn)題的正向映射和逆向映射,在一定程度上防止了過(guò)擬合發(fā)生。Hamilton等人將D-Bar方法與深度學(xué)習(xí)方法進(jìn)行結(jié)合,可較清晰地恢復(fù)器官的邊界特征[2]。Baguer等人引入正則化和初始重構(gòu)的深度圖像先驗(yàn)方法進(jìn)行圖像重建[3]。Chen等人[4]在U-Net結(jié)構(gòu)前添加全連接層形成新的深度學(xué)習(xí)架構(gòu),首先輸入通過(guò)全連接層后生成電導(dǎo)率分布的初始猜測(cè),其次通過(guò)U-Net去噪模型進(jìn)行最終預(yù)測(cè),經(jīng)過(guò)去噪模型處理后,初始猜測(cè)的圖像質(zhì)量有明顯提高。Smyl等人使用深度學(xué)習(xí)方法優(yōu)化電極位置,優(yōu)化的電極位置可以減少EIT重建中的誤差[5]。
上述方法均證實(shí)了深度學(xué)習(xí)在EIT圖像重建的可靠性和有效性,證明了深度學(xué)習(xí)方法更能克服傳統(tǒng)重建方法中存在的問(wèn)題。但對(duì)于網(wǎng)絡(luò)的泛化能力存在不確定因素,忽視了EIT正問(wèn)題中傳感器的對(duì)稱幾何結(jié)構(gòu)及其對(duì)于逆問(wèn)題圖像重建的積極影響。Hu等人[6]針對(duì)幾何結(jié)構(gòu)提出了電阻抗圖(EIM)的概念,更好地反映EIT傳感器的幾何形狀。
本文受到上述研究工作的啟發(fā),為進(jìn)一步提高EIT的分辨率,提出了一種基于EIM電壓矩陣、UNet 模型結(jié)構(gòu)和EfficientNet編碼器的EfficientUNet網(wǎng)絡(luò)模型。通過(guò)有限元數(shù)值模擬方法建立樣本集,每個(gè)樣本包含邊界電壓測(cè)量值和對(duì)應(yīng)的電導(dǎo)率分布向量。將數(shù)據(jù)預(yù)處理為EIM矩陣作為網(wǎng)絡(luò)的輸入,基于UNet 網(wǎng)絡(luò)進(jìn)行EIT圖像重構(gòu),在考慮EIT正問(wèn)題中傳感器特殊的對(duì)稱幾何結(jié)構(gòu)的同時(shí),使用EfficientNet編碼器結(jié)構(gòu)作為特征提取模塊,提高模型的魯棒性。對(duì)EIT 數(shù)據(jù)集加入信噪比為30~50 dB的高斯白噪聲,用以證明本文所提方法的抗噪聲能力和泛化能力。
1 電阻抗圖像重建方法
1.1 EIT 的數(shù)學(xué)模型
在EIT研究中,單用麥克斯韋方程組沒(méi)有考慮實(shí)際問(wèn)題中的接觸電阻,無(wú)論采用何種測(cè)量電極都有一定的阻抗,而且電極與被測(cè)物體接觸時(shí)也形成了一定的阻抗,把兩者產(chǎn)生的阻抗統(tǒng)一稱為接觸阻抗。考慮接觸阻抗的數(shù)學(xué)模型稱為完備電極模型(CompleteElectrode Model, CEM) [7]。將EIT數(shù)學(xué)公式表示為:
式中,σ 表示電導(dǎo)率,φ 表示場(chǎng)域Ω內(nèi)部的電勢(shì)分布,n 為外法向單位矢量,Jn 是由電極注入的電流密度,Zl 是第l 個(gè)測(cè)量電極的接觸阻抗,φl(shuí) 是電極上測(cè)得的電位。電導(dǎo)率和邊界電壓測(cè)量值呈非線性關(guān)系,本文中采用有限元法來(lái)求解EIT正問(wèn)題。
EIT逆問(wèn)題旨在通過(guò)根據(jù)邊界感應(yīng)電壓值恢復(fù)電導(dǎo)率分布。在本文中運(yùn)用深度神經(jīng)網(wǎng)絡(luò)求解EIT逆問(wèn)題,該網(wǎng)絡(luò)由邊界電壓測(cè)量值數(shù)據(jù)迭代更新網(wǎng)絡(luò)參數(shù)并預(yù)測(cè)電導(dǎo)率分布。
1.2 數(shù)據(jù)集設(shè)置
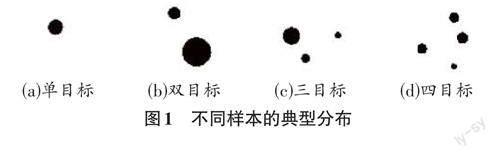
深度學(xué)習(xí)需要大量的樣本來(lái)訓(xùn)練網(wǎng)絡(luò),數(shù)據(jù)集的質(zhì)量對(duì)模型的泛化能力有重要影響。EIT技術(shù)需要獲得盡可能多的電導(dǎo)率分布和相應(yīng)的邊界感應(yīng)電壓值。通過(guò)有限元計(jì)算程序模擬一個(gè)圓形16電極EIT傳感器。利用COMSOL和MATLAB聯(lián)合仿真,構(gòu)建一個(gè)包含多個(gè)目標(biāo)體的EIT數(shù)據(jù)集,采用相鄰激勵(lì)求解EIT 正演問(wèn)題。其中16個(gè)電極均勻放置在管壁上,管道內(nèi)直徑為300 mm,電極的寬度和高度均為20 mm。背景區(qū)域電導(dǎo)率設(shè)置為0.01 S/m,目標(biāo)體電導(dǎo)率設(shè)置為5e-4 S/m。創(chuàng)建了4類不同的樣本數(shù)據(jù),模擬了1~4個(gè)圓形目標(biāo)體,每個(gè)目標(biāo)體的大小和位置在被測(cè)場(chǎng)域內(nèi)隨機(jī),且互不相交。典型樣本分布如圖1所示。共模擬樣本32 400個(gè),每對(duì)樣本包含一個(gè)3 244個(gè)元素的電導(dǎo)率分布向量和對(duì)應(yīng)的208個(gè)元素的電壓向量。將所有樣本采取4∶1的比例劃分為不相交的訓(xùn)練集和測(cè)試集,用訓(xùn)練集對(duì)模型進(jìn)行訓(xùn)練,在測(cè)試集中驗(yàn)證模型的泛化能力。表1所示為數(shù)據(jù)集分布。
1.3 數(shù)據(jù)預(yù)處理
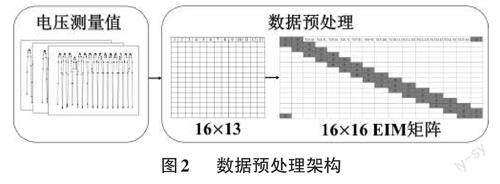
在將EIT數(shù)據(jù)集中的測(cè)量電壓輸入網(wǎng)絡(luò)之前,需要對(duì)電壓進(jìn)行預(yù)處理以適應(yīng)網(wǎng)絡(luò)結(jié)構(gòu)。EIT傳感器有特殊的對(duì)稱幾何結(jié)構(gòu),本文采用相鄰測(cè)量策略,每對(duì)樣本最終可獲得208個(gè)差分電壓測(cè)量值。如圖2所示,將1×208個(gè)元素的電壓向量重構(gòu)為16×13的電壓矩陣,同一行的每個(gè)元素共用一對(duì)激勵(lì)電極對(duì),同一列的每個(gè)元素共用一對(duì)測(cè)量電極對(duì)。通過(guò)將0填充到每一行深灰色的三個(gè)單元,將16×13的電壓矩陣投影到16×16的EIM電壓矩陣中。利用EfficientUNet網(wǎng)絡(luò)重構(gòu)EIM矩陣,預(yù)測(cè)EIT圖像。
1.4 EIT 圖像重建的EfficientUNet 結(jié)構(gòu)
數(shù)據(jù)預(yù)處理后,無(wú)任何過(guò)濾,避免丟失信息。將EIM電壓矩陣作為網(wǎng)絡(luò)的輸入,該網(wǎng)絡(luò)基于U-Net結(jié)構(gòu)構(gòu)建。經(jīng)過(guò)一個(gè)上采樣層將EIM矩陣轉(zhuǎn)化為64×64 大小的輸入向量,再由下采樣編碼部分和上采樣解碼部分以及最終的分割部分進(jìn)行EIT圖像重建。Effi?cientUNet 網(wǎng)絡(luò)結(jié)構(gòu)圖如圖3 所示。經(jīng)上采樣Upsample重塑后的輸入向量傳入編碼器模塊。編碼器模塊由EfficientNet-b0的編碼結(jié)構(gòu)組成[8],首先經(jīng)過(guò)一個(gè)Stem模塊,將輸入特征通道擴(kuò)張,并減小特征圖尺寸。Stem模塊主要對(duì)輸入特征映射進(jìn)行歸一化和零填充,再經(jīng)過(guò)一個(gè)二維卷積層后進(jìn)行BN歸一化,用激活函數(shù)處理非線性關(guān)系。得到的特征矩陣經(jīng)過(guò)四個(gè)編碼器塊E 1、E 2、E 3、E 4后,得到通道數(shù)為320的輸出向量。其中,這4 個(gè)編碼器塊主要由4 個(gè)Conv2dStaticSamePadding 層組成,每一個(gè)Conv2dStat?icSamePadding都通過(guò)零填充和卷次操作來(lái)調(diào)整特征向量大小。隨后輸入由UNet網(wǎng)絡(luò)解碼器[9]的上采樣模塊進(jìn)行特征還原,同時(shí)與由EfficientNet-b0編碼結(jié)構(gòu)組成編碼器的輸出分別進(jìn)行特征跳躍拼接,高效學(xué)習(xí)目標(biāo)體的細(xì)粒度細(xì)節(jié),將非均質(zhì)場(chǎng)內(nèi)部的目標(biāo)體進(jìn)行分割,避免邊界模糊化,減少偽影。4個(gè)解碼器模塊D 1、D 2、D 3、D 4進(jìn)行特征處理后,經(jīng)過(guò)卷積層和Sig?moid激活函數(shù)進(jìn)行最終的電導(dǎo)率圖像預(yù)測(cè)。Efficien?tUNet網(wǎng)絡(luò)的參數(shù)量較小,但能進(jìn)行高分辨率的圖像預(yù)測(cè),UNet廣泛應(yīng)用于醫(yī)學(xué)圖像分割,對(duì)于找出被測(cè)場(chǎng)域內(nèi)異常體具有準(zhǔn)確性高的特點(diǎn),EfficientNet-b0的編碼器輸出的結(jié)果向量與UNet解碼器得到的特征向量進(jìn)行拼接,盡可能保持原有輸入信息不丟失,提高預(yù)測(cè)準(zhǔn)確率。
1.5 損失函數(shù)
為降低計(jì)算復(fù)雜度加快訓(xùn)練速度,此模型采用二分類交叉熵?fù)p失LBCE(Binary Cross Entropy Loss)顯式訓(xùn)練EfficientUNet網(wǎng)絡(luò),LBCE 刻畫(huà)實(shí)際輸出和期望輸出的距離,如公式(2)所示:
式中,K表示數(shù)據(jù)集的大小,C(i)gt 表示第i 對(duì)輸入目標(biāo)對(duì)的真實(shí)二值掩碼值,C(i)fore 表示第i 對(duì)輸入目標(biāo)對(duì)預(yù)測(cè)的二值掩碼值。將真實(shí)電導(dǎo)率分布中的所有非零元素設(shè)置為1,其余元素保持為0,生成預(yù)測(cè)的二值掩碼值C(i)fore。
1.6 評(píng)估標(biāo)準(zhǔn)
本文采用常用的相對(duì)圖像誤差(Relative Image Er?ror,RIE)和圖像相關(guān)系數(shù)(Image Correlation Coeffi?cient,ICC)來(lái)評(píng)價(jià)重建圖像的質(zhì)量。RIE和ICC分別定義在公式(3)和公式(4)中。
式中,σ* 表示預(yù)測(cè)電導(dǎo)率,σ*i 表示σ* 第i 個(gè)值,-σ* 表示模型預(yù)測(cè)的重建圖像的電導(dǎo)率均值, σ 表示真實(shí)電導(dǎo)率,σi 表示σ 第i 個(gè)值,σˉ 表示被測(cè)場(chǎng)域真實(shí)電導(dǎo)率的均值。RIE和ICC分別表示真實(shí)值和預(yù)測(cè)值之間的相對(duì)誤差和相關(guān)程度,RIE越小,ICC越大,重建圖像質(zhì)量越高。
2 實(shí)驗(yàn)設(shè)置
2.1 模型訓(xùn)練
為了比較網(wǎng)絡(luò)性能,除了EfficientUNet網(wǎng)絡(luò)結(jié)構(gòu)外,本文還將EIM數(shù)據(jù)結(jié)構(gòu)方式和DenseNet121網(wǎng)絡(luò)的編碼器模塊和PSPNet網(wǎng)絡(luò)的解碼器模塊進(jìn)行組合,與所提網(wǎng)絡(luò)結(jié)構(gòu)進(jìn)行對(duì)比。采用Pytorch-GPU環(huán)境對(duì)提出的深度學(xué)習(xí)模型進(jìn)行訓(xùn)練,采用NVIDIA GeForceRTX 3060加速計(jì)算。將數(shù)據(jù)批處理大小設(shè)為128,學(xué)習(xí)速率設(shè)置為0.000 1,優(yōu)化器使用AdamW,通過(guò)在計(jì)算梯度時(shí)自動(dòng)加上正則項(xiàng),提高效率。為避免過(guò)擬合,選擇222個(gè)訓(xùn)練次數(shù)作為模型的最終訓(xùn)練次數(shù),并保存訓(xùn)練過(guò)程中損失最低的權(quán)重模型為最優(yōu)模型。
3 實(shí)驗(yàn)結(jié)果和分析
3.1 評(píng)估標(biāo)準(zhǔn)曲線
網(wǎng)絡(luò)訓(xùn)練結(jié)束后,測(cè)試集的RIE和ICC分別如圖4 (a)和(b)所示。橫軸表示訓(xùn)練次數(shù)epoch,縱軸分別表示RIE和ICC的值。實(shí)線和點(diǎn)線分別表示在訓(xùn)練過(guò)程中訓(xùn)練集和測(cè)試集的RIE值和ICC值隨著訓(xùn)練次數(shù)epoch的變化。由圖4可看出,隨著訓(xùn)練次數(shù)的增加,訓(xùn)練集和測(cè)試集的RIE迅速減小,測(cè)試集的RIE曲線最后穩(wěn)定在0.04左右,ICC迅速增大,最后穩(wěn)定在0.98 左右,表明網(wǎng)絡(luò)模型性能良好。
3.2 仿真結(jié)果評(píng)價(jià)
本文通過(guò)在EIT數(shù)據(jù)集的電壓測(cè)量中添加不同級(jí)別的高斯白噪聲來(lái)實(shí)現(xiàn)數(shù)據(jù)增強(qiáng),使模型在處理具有噪聲污染數(shù)據(jù)時(shí)更具有魯棒性。在50 dB、40 dB、30 dB信噪比噪聲以及無(wú)噪聲情況下,EfficientUNet網(wǎng)絡(luò)模型的圖像重建結(jié)果如圖5所示。圖中黑色球狀物為被測(cè)非均質(zhì)場(chǎng)內(nèi)的目標(biāo)體。第一行是模型編號(hào),共有單目標(biāo)模態(tài)、雙目標(biāo)模態(tài)、三目標(biāo)模態(tài)和四目標(biāo)模態(tài)4種模態(tài)。第二行代表EIT模型的真實(shí)圖像,第三、四、五、六行分別是無(wú)噪聲、SNR為50 dB、SNR為40 dB、SNR為30 dB 下EfficientUNet模型進(jìn)行圖像重建的結(jié)果。由圖5可看出,在無(wú)噪聲和3種噪聲情況下,此網(wǎng)絡(luò)模型均可精準(zhǔn)地反映出目標(biāo)體的數(shù)目、大小、形態(tài)及位置。
2種深度學(xué)習(xí)網(wǎng)絡(luò)模型基于測(cè)試集在SNR為50dB、40 dB、30 dB的圖像重建結(jié)果分別如圖6、圖7、圖8所示,黑色球狀物為被測(cè)非均質(zhì)場(chǎng)內(nèi)的目標(biāo)體。第一行為模型編號(hào),第二行代表仿真模型的真實(shí)圖像,第三、四行分別為2種深度學(xué)習(xí)模型的重建圖像結(jié)果。可見(jiàn), DensPSPNet網(wǎng)絡(luò)在噪聲情況下的電導(dǎo)率圖像重建容易丟失非均質(zhì)場(chǎng)內(nèi)的目標(biāo)體,形狀上不能很好地還原目標(biāo)體的原始邊界,且有偽影易粘連。Effi?cientUNet網(wǎng)絡(luò)在不同等級(jí)信噪比下的結(jié)構(gòu)預(yù)測(cè)均能準(zhǔn)確重建出目標(biāo)體,目標(biāo)個(gè)數(shù)正確,邊界清晰且無(wú)偽影。證明了EfficientUNet網(wǎng)絡(luò)抗噪聲能力強(qiáng),重建圖像的分辨率高。
4 結(jié)論
在本文中,根據(jù)EIT傳感器特定的幾何對(duì)稱特性,基于UNet網(wǎng)絡(luò)的全卷積網(wǎng)絡(luò)與EfficientNet-b0編碼后的輸出層進(jìn)行特征跳躍拼接,提取初始數(shù)據(jù)轉(zhuǎn)化為原始粗圖像的電導(dǎo)率參數(shù)和邊界元素信息,使得特征可以重復(fù)利用,提出了EfficientUNet網(wǎng)絡(luò)模型。實(shí)現(xiàn)了對(duì)包含不同數(shù)目、大小和位置目標(biāo)的被測(cè)場(chǎng)域進(jìn)行電導(dǎo)率分布的圖像重構(gòu),有效學(xué)習(xí)了EIT成像過(guò)程中邊界測(cè)量電壓和電導(dǎo)率分布的非線性映射關(guān)系,利用EIT數(shù)據(jù)集中的訓(xùn)練集進(jìn)行訓(xùn)練,測(cè)試集進(jìn)行測(cè)試評(píng)價(jià),重構(gòu)出高空間分辨率的EIT圖像。對(duì)新方法的抗噪聲能力進(jìn)行了測(cè)試,相關(guān)實(shí)驗(yàn)結(jié)果證明,在無(wú)噪聲和不同噪聲水平下,EfficientUNet 網(wǎng)絡(luò)算法均優(yōu)于DensPSPNet對(duì)比算法,重建出來(lái)圖像的被測(cè)場(chǎng)域中目標(biāo)個(gè)數(shù)未丟失,和真實(shí)數(shù)目一致,邊界區(qū)域明顯,圖像偽影最少。能準(zhǔn)確保留目標(biāo)體的結(jié)構(gòu)和邊界信息,具有分辨率高、抗噪聲能力強(qiáng)、泛化能力好的優(yōu)點(diǎn)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
