基于YOLOv4的客車轉(zhuǎn)向架部件漏油故障圖像檢測(cè)
2024-03-25 03:24:54李海霞徐彥恒
科技創(chuàng)新與應(yīng)用 2024年8期
關(guān)鍵詞:深度學(xué)習(xí)
李海霞 徐彥恒
摘? 要:作為車體主要部件的鐵路客車轉(zhuǎn)向架是列車運(yùn)行安全保障的關(guān)鍵部件,目前主要依靠客車故障軌旁圖像檢測(cè)系統(tǒng)檢測(cè)出轉(zhuǎn)向架故障并分類定位,但存在一定漏檢和誤檢,檢測(cè)準(zhǔn)確率無(wú)法保證。基于此,針對(duì)客車轉(zhuǎn)向架常見的關(guān)鍵部件漏油現(xiàn)象,展開漏油區(qū)域視覺(jué)圖像缺陷檢測(cè)研究,提出一種改進(jìn)的YOLOv4目標(biāo)檢測(cè)算法,使用k-means++聚類方法獲得更匹配關(guān)鍵部位漏油區(qū)域目標(biāo)的候選框參數(shù),更準(zhǔn)確地識(shí)別和定位漏油區(qū)域目標(biāo)。在網(wǎng)絡(luò)中將部分標(biāo)準(zhǔn)卷積替換為可變形卷積,提高目標(biāo)檢測(cè)的準(zhǔn)確性。
關(guān)鍵詞:客車轉(zhuǎn)向架;深度學(xué)習(xí);故障檢測(cè);YOLOv4;檢測(cè)精度
中圖分類號(hào):U279.3+23? ? ? 文獻(xiàn)標(biāo)志碼:A? ? ? ? ? 文章編號(hào):2095-2945(2024)08-0049-05
Abstract: As a main component of the carbody, the railway passenger car bogie plays a crucial role in ensuring the safety of train operations. Currently, the detection of bogie faults relies mainly on the trackside image monitoring system, which detects and classifies bogie faults. However, this system suffers from certain shortcomings, including missed detections and false alarms, leading to a lack of accuracy in fault detection. In response to this, this research focuses on the visual image detection of common oil leakage issues in key components of passenger car bogies. An improved YOLOv4 object detection algorithm was proposed, utilizing the k-means++ clustering method to obtain candidate box parameters that better match the oil leakage areas in key components. This approach aims to achieve more accurate identification and localization of oil leakage areas. In the network, part of the standard convolution is replaced by deformable convolution to improve the accuracy of target detection.
Keywords: passenger car bogie; deep learning; fault detection; YOLOv4; detection accuracy
鐵路運(yùn)輸在現(xiàn)代社會(huì)交通運(yùn)輸系統(tǒng)中起著至關(guān)重要的作用。其中,鐵路客車轉(zhuǎn)向架[1]作為車體主要部件,是列車運(yùn)行安全保障的關(guān)鍵部件,對(duì)其進(jìn)行故障檢測(cè)十分重要。隨著客車速度不斷提升,易受到磨損、硬物撞擊,加上零部件多樣化極易出現(xiàn)各類故障,任何細(xì)微故障都可能導(dǎo)致重大事故發(fā)生。開發(fā)一套智能客車故障檢測(cè)系統(tǒng)實(shí)現(xiàn)精準(zhǔn)、高效的列車故障檢測(cè)具有重要意義。目前,我國(guó)對(duì)于普速客車動(dòng)態(tài)檢測(cè)主要依靠客車故障軌旁圖像檢測(cè)系統(tǒng)(TVDS)[2],該系統(tǒng)可在客車關(guān)鍵部位的圖像中檢測(cè)出轉(zhuǎn)向架故障并分類定位,但檢測(cè)準(zhǔn)確度較低,存在一定漏檢和誤檢,高精度的實(shí)時(shí)檢測(cè)有一定困難。
近年來(lái),基于深度學(xué)習(xí)的客車關(guān)鍵部位目標(biāo)檢測(cè)技術(shù)得到不斷發(fā)展,能自動(dòng)檢測(cè)和標(biāo)注客車關(guān)鍵部位圖像中故障的位置和類型,預(yù)判可能存在的故障,減少事故發(fā)生。因此,采用深度學(xué)習(xí)方法提升客車可視部位故障檢測(cè)的精度和速度具有實(shí)際意義。基于深度學(xué)習(xí)的目標(biāo)檢測(cè)方法主要分為兩大類,一類是基于回歸的目標(biāo)檢測(cè)算法,如YOLO系列[3]、SSD等[4];另一類是基于候選區(qū)域的檢測(cè)算法,如R-CNN[5]、Fast R-CNN[6]、Faster R-CNN[7]等。基于深度學(xué)習(xí)的檢測(cè)方法在鐵路故障、缺陷檢測(cè)中已得到了應(yīng)用。如Liu等[8]針對(duì)列車運(yùn)行接觸網(wǎng)緊固件松動(dòng)、缺失缺陷,提出了通過(guò)YOLO算法實(shí)現(xiàn)緊固件定位,并通過(guò)深度卷積神經(jīng)網(wǎng)絡(luò)DCNN實(shí)現(xiàn)緊固件故障識(shí)別。Yao等[9]利用密集卷積網(wǎng)絡(luò),并結(jié)合遷移學(xué)習(xí)實(shí)現(xiàn)車輛底部異物檢測(cè)。張江勇[10]融合Inception網(wǎng)絡(luò)和深度殘差網(wǎng)絡(luò)設(shè)計(jì)出新的基礎(chǔ)網(wǎng)絡(luò),在動(dòng)車可視部位圖像中檢測(cè)出故障并分類定位。杜家豪等[11]提出一種基于聯(lián)邦學(xué)習(xí)(Federated learning)的轉(zhuǎn)向架全局故障診斷方法,解決了單一線路高速列車(HST)轉(zhuǎn)向架缺少足量故障數(shù)據(jù)特征而導(dǎo)致故障診斷模型泛化能力有限的問(wèn)題。趙江平等[12]針對(duì)小尺度螺栓檢測(cè)方面存在的問(wèn)題,提出改進(jìn)Faster R-CNN檢測(cè)的客車關(guān)鍵部件圖像缺陷檢測(cè)算法,解決缺陷目標(biāo)定位不準(zhǔn)確的問(wèn)題。李利榮等[13]針對(duì)列車底部零件難以檢測(cè)的問(wèn)題,提出了一種基于OSE-dResnet網(wǎng)絡(luò)的列車底部零件檢測(cè)算法。
雖然上述檢測(cè)算法在檢測(cè)列車各類故障問(wèn)題上有了一定研究,但在列車關(guān)鍵部位常見漏油區(qū)域檢測(cè)的問(wèn)題上研究較少。本文根據(jù)轉(zhuǎn)向架可視部位區(qū)域常出現(xiàn)的油壓減震器漏油等車輛常見故障作為研究目標(biāo),主要針對(duì)漏油部位的形式不同,漏油范圍形狀差異大等問(wèn)題,提出一種改進(jìn)的YOLOv4客車可視部位漏油故障檢測(cè)方法,相較于原YOLO算法,提高了檢測(cè)精度。
1? 客車轉(zhuǎn)向架故障圖像檢測(cè)
在基于深度學(xué)習(xí)的列車部件漏油故障檢測(cè)中,存在圖像背景較為復(fù)雜、不同尺度漏油區(qū)域檢測(cè)等挑戰(zhàn)。為了解決相關(guān)問(wèn)題,并進(jìn)一步提高檢測(cè)精度,本文研究了一種基于改進(jìn)的YOLOv4的列車關(guān)鍵部件漏油故障目標(biāo)檢測(cè)構(gòu)架。首先介紹了目標(biāo)檢測(cè)模型(CSPDarknet53)的主干框架,核心模塊Cross-Stage Partial Layer (CSPLayer)包含一個(gè)大卷積核,使檢測(cè)網(wǎng)絡(luò)能夠更全面精確地捕獲信息。為了應(yīng)對(duì)適應(yīng)列車部件漏油尺度幾何變化加入了可變形卷積,使得檢測(cè)網(wǎng)絡(luò)檢測(cè)精度進(jìn)一步提高。
1.1? YOLOv4目標(biāo)檢測(cè)算法
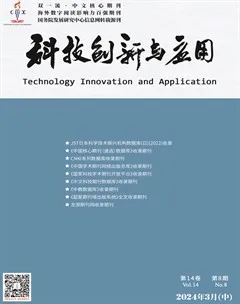
YOLOv4[14]是近些年來(lái)頗受歡迎的一種高效、強(qiáng)大的目標(biāo)檢測(cè)算法,網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。該算法框架包括輸入部分、CSPDarknet53主干網(wǎng)絡(luò)、PANet特征增強(qiáng)模塊和檢測(cè)頭(Dense Prediction)4個(gè)部分。
1.1.1? 輸入數(shù)據(jù)增強(qiáng)
算法數(shù)據(jù)增強(qiáng)采用Mosaic方式,隨機(jī)拼接4張訓(xùn)練圖像。這樣增加了小目標(biāo)數(shù)據(jù)集,提高了網(wǎng)絡(luò)的魯棒性。同時(shí),也顯著減少了對(duì)Mini-batch的需求。采用自對(duì)抗訓(xùn)練SAT在原樣本上加入一些輕微的擾動(dòng),從而表現(xiàn)出更好的泛化性能。
1.1.2? 主干網(wǎng)絡(luò)Backbone
主干特征提取網(wǎng)絡(luò)采用CSPDarknet53[15],是在YOLOv3的Darknet53網(wǎng)絡(luò)結(jié)構(gòu)的基礎(chǔ)上引入了CSP模塊結(jié)構(gòu)。主干特征提取網(wǎng)絡(luò)CSPDarknet53經(jīng)過(guò)CBM模塊、CSP1模塊、CSP2模塊和CSP8模塊獲得第一層特征,后經(jīng)CSP8模塊獲得第二層特征,再經(jīng)CSP4模塊獲得第三層特征,最后進(jìn)入目標(biāo)檢測(cè)模塊(圖1)。其中,CBM模塊由卷積層、批歸一化層BN和Mish激活函數(shù)構(gòu)成。CSP模塊由CBM模塊和殘差模塊Res構(gòu)成。CSP模塊先將特征映射分為2個(gè)分支,再將這2個(gè)分支進(jìn)行concat融合,這樣在輕量化網(wǎng)絡(luò)、降低內(nèi)存成本的同時(shí),可保持主干網(wǎng)絡(luò)提取特征信息的準(zhǔn)確性。
1.1.3? 特征增強(qiáng)模塊Neck
模塊Neck由空間金字塔池化SPP結(jié)構(gòu)、特征金字塔網(wǎng)絡(luò)FPN、路徑聚合網(wǎng)絡(luò)PANet構(gòu)成。SPP對(duì)特征層使用3種大小的卷積核進(jìn)行最大池化操作,在不降低網(wǎng)絡(luò)運(yùn)行速度的同時(shí)增加了感受野。PANnet從特征網(wǎng)絡(luò)提取低、中、高不同特征圖,再引入自底向上的路徑,傳達(dá)定位特征,更好地融合不同層網(wǎng)絡(luò)的特征信息,從而進(jìn)一步提高特征提取的能力。
1.1.4? 檢測(cè)頭Head
YOLO Head的目的是利用得到的特征進(jìn)行預(yù)測(cè)。首先由主干網(wǎng)絡(luò)部分提取特征信息,然后由Neck部分進(jìn)行特征的語(yǔ)義表示,最后通過(guò)CBL模塊和卷積運(yùn)算得到19×19、38×38、76×76尺度的預(yù)測(cè)特征圖,分別用于大、中、小物體預(yù)測(cè)。YOLOv4通過(guò)引入縮放因子,解決了當(dāng)預(yù)測(cè)特征圖中真實(shí)物體質(zhì)心非常接近網(wǎng)格邊界時(shí),預(yù)測(cè)坐標(biāo)難以預(yù)測(cè)真實(shí)坐標(biāo)的問(wèn)題。在邊界框位置計(jì)算損失時(shí)用CIoU代替了MSE,作為Bounding box的損失函數(shù),公式如下
LCIoU=1-IoU++α·v ,? ?(1)
式中:IoU為預(yù)測(cè)框和真實(shí)框之間的交并比;ρ2(.)為歐氏距離;Actr、Bctr分別為預(yù)測(cè)框和真實(shí)框的中心點(diǎn)坐標(biāo);c為2個(gè)框最小包圍框的對(duì)角線長(zhǎng)度;α·v為長(zhǎng)寬比的懲罰項(xiàng)系數(shù),α為一個(gè)正數(shù),v用來(lái)衡量長(zhǎng)寬比一致性的參數(shù),具體定義如下
v=(arctan-arctan)2,? ? (2)
α=?, (3)
式中:wgt和hgt為真實(shí)框的寬和高;w和h為預(yù)測(cè)框的寬和高。
1.2? 模型優(yōu)化
1.2.1? 先驗(yàn)框設(shè)計(jì)
YOLOv4使用錨框機(jī)制,生成目標(biāo)檢測(cè)的先驗(yàn)框。原始算法的檢測(cè)對(duì)象為人物等通用類型,錨框(anchor)尺寸并不適用于本文檢測(cè)目標(biāo)任務(wù)。通過(guò)對(duì)實(shí)驗(yàn)數(shù)據(jù)集分析,漏油區(qū)域的尺度主要集中在30~190像素之間。為了涵蓋漏油區(qū)域的不同尺寸,提高檢測(cè)精度,使用K-means++聚類對(duì)訓(xùn)練集中的漏油標(biāo)注區(qū)域進(jìn)行分析。實(shí)驗(yàn)確定了9組anchor,(32,31),(28,81),(43,66),(64,57),(68,176),(97,131),(143,143),(140,294),(209,297),平均分配到3個(gè)預(yù)測(cè)尺度的特征圖。經(jīng)過(guò)K-means++聚類優(yōu)化后生成的anchor更適合數(shù)據(jù)漏油區(qū)域尺寸,生成質(zhì)量更高的正樣本,提高模型的檢測(cè)準(zhǔn)確率。
1.2.2? 可變形卷積
本次檢測(cè)任務(wù)的漏油區(qū)域的尺寸和形態(tài)多樣,可在模型預(yù)測(cè)網(wǎng)絡(luò)中適當(dāng)引入可變形卷積[16](Deformable Convolution Networks,DCN)。為了在保證算法速度幾乎不變的情況下,僅在CSPDarknet53網(wǎng)絡(luò)中CSP4的3×3標(biāo)準(zhǔn)卷積替換為可變形卷積。可變形卷積是通過(guò)附加的卷積層,從特征圖進(jìn)行學(xué)習(xí),在規(guī)則網(wǎng)格R上增加一個(gè)偏移量。{?駐pn|n=1,2,…N},N∈|R|,偏移是通的。因此,變形以局部、密集、自適應(yīng)的方式以輸入特征為條件。使卷積核的形態(tài)更貼近漏油區(qū)域形狀。傳統(tǒng)卷積和可變形卷積過(guò)程如公式(4)、(5)所示
y(p0)=w(pn)x(p0+pn) , (4)
y(p0)=w(pn)x(p0+pn+?駐pn) , (5)
式中:p0為輸出的特征圖上的每個(gè)位置;w(pn)為采樣點(diǎn)的權(quán)重;pn為R所列位置的枚舉值。
可變形卷積隨著關(guān)鍵部件漏油區(qū)域形態(tài)變化來(lái)自動(dòng)地改變采樣點(diǎn)位置,增強(qiáng)定位能力,改變感受野范圍。如圖2所示。
2? 實(shí)驗(yàn)結(jié)果及分析
本文實(shí)驗(yàn)環(huán)境平臺(tái)為Intel(R)Core(TM)i7 9700 CPU,64 GB內(nèi)存,64位Windows10操作系統(tǒng);訓(xùn)練使用GPU為RTX-1080Ti(32 GB),深度學(xué)習(xí)框架為Pytorch1.7.0,Python版本為3.7。
2.1? 數(shù)據(jù)集制作
本文實(shí)驗(yàn)數(shù)據(jù)來(lái)自于現(xiàn)場(chǎng)TVDS采集圖像,采集范圍主要包括:鐵路客車車體底部可視部件(車體底部及轉(zhuǎn)向架制動(dòng)裝置、輪對(duì)、車鉤裝置)、側(cè)部可視部件(側(cè)部裙板、轉(zhuǎn)向架及軸箱、搖枕及彈簧、油壓減震器和車端連接部等可視部位)。數(shù)據(jù)集的制作流程包括圖像裁剪、圖像標(biāo)注和增強(qiáng)。首先,采集到列車可視部位原始圖像分辨率為1 024×1 028像素,由于計(jì)算資源限制,采用圖像分割處理為算法608×608像素。其次,采用LabelImg軟件標(biāo)注制作VOC格式數(shù)據(jù)集。最后,送入檢測(cè)網(wǎng)絡(luò)進(jìn)行Mosaic數(shù)據(jù)增強(qiáng),增加數(shù)據(jù)樣本多樣性。本次實(shí)驗(yàn)共采集列車可視部位含有漏油故障圖像2 825張,經(jīng)過(guò)軟件標(biāo)注,生成VOC數(shù)據(jù)集格式。在YOLOv4的Mosaic數(shù)據(jù)增強(qiáng)下,每批導(dǎo)入4張圖片,進(jìn)行隨機(jī)翻轉(zhuǎn)、縮放等增強(qiáng)拼接組合成新的圖片。
2.2? 評(píng)價(jià)方法
YOLOv4目標(biāo)檢測(cè)精度指標(biāo)有準(zhǔn)確率(Precision, P),召回率(Recall, R),計(jì)算見式(6)—式(9)。轉(zhuǎn)向架可視部件按照是否漏油分為有漏油故障(正樣本)和無(wú)漏油故障(負(fù)樣本)圖像,屬于二分類目標(biāo)。因此,TP(True Positive)為正樣本,即檢測(cè)到的漏油故障標(biāo)識(shí)為漏油故障樣本,否則是錯(cuò)誤的正樣本FP(False Positive)。FN(False Negative)是把檢測(cè)到的漏油故障標(biāo)識(shí)為無(wú)故障樣本。
P=,(6)
R=。(7)
平均準(zhǔn)確率(Average Precision, AP)為P-R曲線下方的面積,計(jì)算如式(8)所示。平均準(zhǔn)確率均值(mean Average Precision, mAP)是所有類別的平均準(zhǔn)確率的均值,計(jì)算如式(9)所示
AP=P(R)dR,(8)
mPA=APi,(9)
式中:N為類別數(shù)量。
2.3? 結(jié)果分析
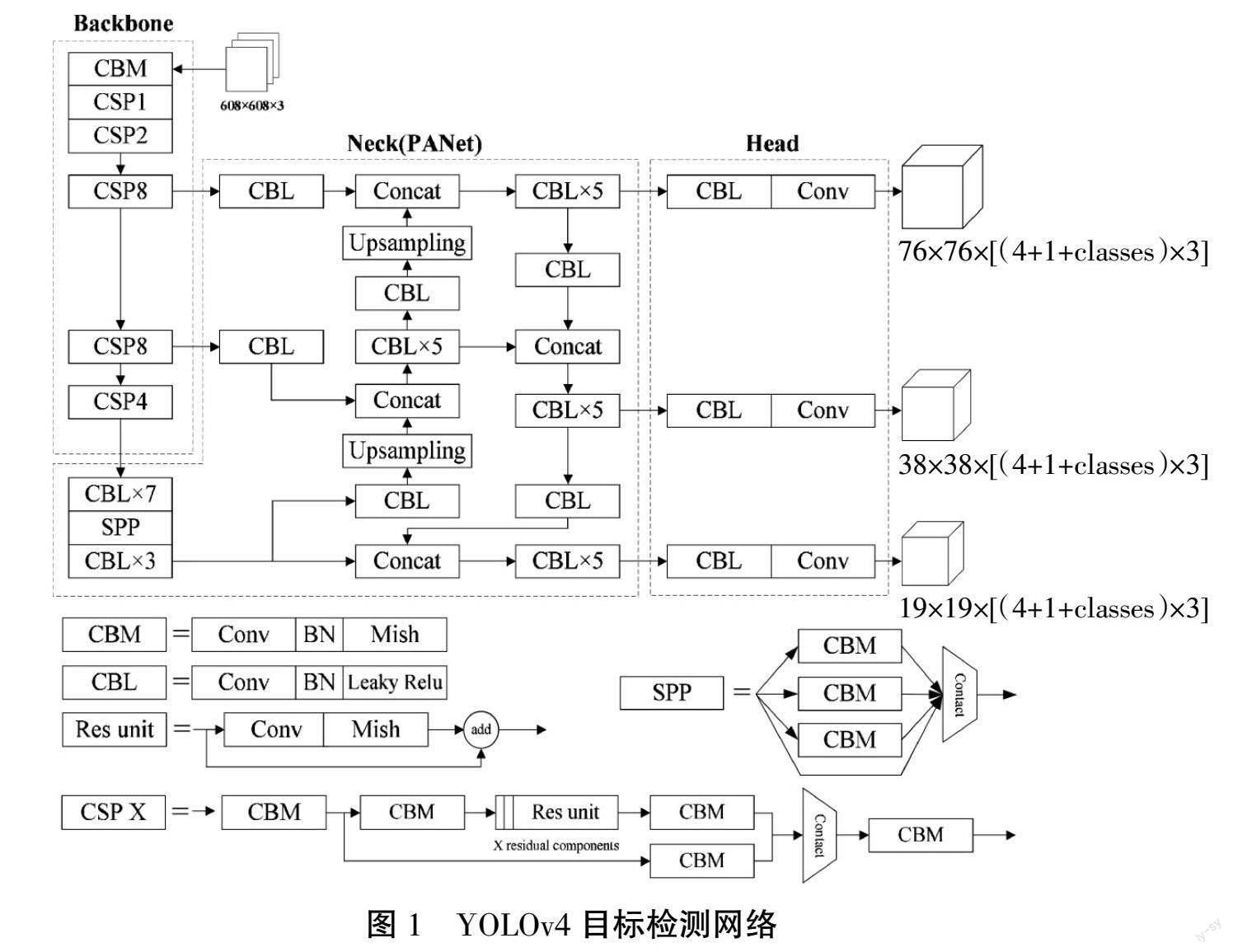
為了進(jìn)行充分的對(duì)比實(shí)驗(yàn),分別對(duì)YOLO模型、計(jì)算新錨盒后的YOLO模型YOLOv4-1、本文提出的dcn-YOLOv4模型進(jìn)行訓(xùn)練。設(shè)置實(shí)驗(yàn)訓(xùn)練Epoch為100,初始學(xué)習(xí)率為0.001,Batchsize為4,衰減系數(shù)為0.000 5,動(dòng)量為0.9。對(duì)測(cè)試集的圖像進(jìn)行目標(biāo)檢測(cè),得到檢測(cè)的平均精度與檢測(cè)速度,實(shí)驗(yàn)結(jié)果見表1。
從表1中可以看出,使用聚類獲得新的錨框,有更高的交并比,因此比起YOLOv4原算法mPA小幅提升。加入可變形卷積的dcn-YOLOv4比原始YOLOv4算法檢測(cè)速度有所下降,但是仍然能達(dá)到實(shí)時(shí)效果。檢測(cè)精度提高了2.14個(gè)百分點(diǎn),表明添加的可變形卷積模塊可對(duì)客車部件不同形狀和尺寸的漏油區(qū)域進(jìn)行特征的有效提取。
從實(shí)驗(yàn)結(jié)果可以看出dcn-YOLOv4 模型在犧牲了較小檢測(cè)速度的情況下,有效提升了模型的檢測(cè)精度,滿足了客車轉(zhuǎn)向架關(guān)鍵部位漏油故障的檢測(cè)要求。
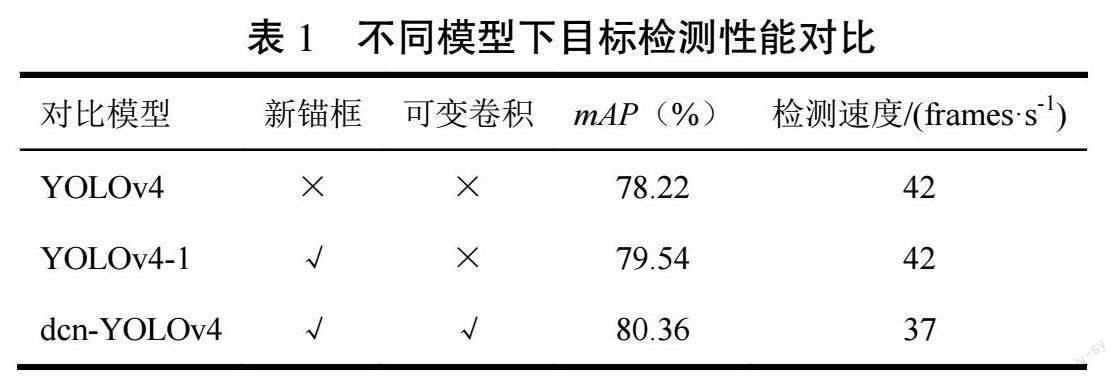
測(cè)試數(shù)據(jù)集的檢測(cè)效果,如圖3所示。從圖3中可以看出,dcn-YOLOv4模型能較好地識(shí)別出油壓減震器等關(guān)鍵部位的漏油位置。
3? 結(jié)束語(yǔ)
本文基于YOLOv4目標(biāo)檢測(cè)框架,開展客車轉(zhuǎn)向架關(guān)鍵部件圖像故障檢測(cè)的研究。使用k-means++聚類方法獲得更匹配關(guān)鍵部位漏油區(qū)域目標(biāo)的候選框參數(shù),更準(zhǔn)確地識(shí)別和定位漏油區(qū)域目標(biāo)。在CSPDarknet53網(wǎng)絡(luò)中將部分標(biāo)準(zhǔn)卷積替換為可變形卷積,提高了目標(biāo)檢測(cè)的準(zhǔn)確性。根據(jù)現(xiàn)場(chǎng)TVDS采集圖像數(shù)據(jù)集上的實(shí)驗(yàn)結(jié)果表明,該模型相比原YOLO算法,目標(biāo)檢測(cè)表現(xiàn)出更好的性能。在接下來(lái)的工作中,還需保證在不降低模型計(jì)算速度的前提下,更好地提高本方法的檢測(cè)效果。
參考文獻(xiàn):
[1] 吳昀璞,金煒東,黃穎坤.基于多域融合CNN的高速列車轉(zhuǎn)向架故障檢測(cè)[J].系統(tǒng)仿真學(xué)報(bào),2018,30(11):4492-4497.
[2] 肖齊.鐵路客車故障軌旁圖像監(jiān)測(cè)系統(tǒng)(TVDS)統(tǒng)型機(jī)設(shè)計(jì)及運(yùn)用[J].鐵道機(jī)車車輛,2018,38(1):43-45.
[3] JOSEPH R,SANTOSH K D,ROSS B. Girshick,AliFarhadi. You only look once: unified, real-time object detection[C]//Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2016:779-788.
[4] JIA S, DIAO C, ZHANG G, et al. Object Detection Based on the Improved Single Shot MultiBox Detector[J].Journal of Physics: Conference Series, 2019, 1187:042041..
[5] ROSS B,GIRSHICK,JEFF D,et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,2014:580-587.
[6] ROSS G. Fast R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision,2015:1440-1448.
[7] REN S Q,HE K,GIRSHICK R,et al.Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks[J]. IEEE transactions on pattern analysis and machine intelligence. 2017,39(6):1137-1149.
[8] LIU Z,ZHONG J, YANG L, et al. Location and fault detection of catenary support components based on deep learning[C]//IEEE2018 International Instrumentation and Measurement Technology Conference,2018:1-6.
[9] YAO Z, HE D, CHEN Y, et al. Inspection of Exterior Substance on High-Speed Train Bottom Based on Improved Deep Learning Method[J]. Measurement, 2020(163):108013.
[10] 張江勇.基于深度學(xué)習(xí)的動(dòng)車關(guān)鍵部位故障圖像檢測(cè)[D].成都:電子科技大學(xué),2019.
[11] 杜家豪,秦娜,賈鑫明,等.基于聯(lián)邦學(xué)習(xí)的多線路高速列車轉(zhuǎn)向架故障診斷[J].西南交通大學(xué)學(xué)報(bào),2024,59(1):185-192.
[12] 趙江平,徐恒,黨悅悅.基于改進(jìn)Faster R-CNN的鐵路客車螺栓檢測(cè)研究[J].中國(guó)安全科學(xué)學(xué)報(bào),2021,31(7):82-89.
[13] 李利榮,王子炎,張開,等.基于OSE-dResnet網(wǎng)絡(luò)的列車底部零件檢測(cè)算法[J].計(jì)算機(jī)工程與科學(xué),2022,44(4):692-698.
[14] BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: Optimal Speed and Accuracy of Object Detection [C]//IEEE conference on Computer Vision and Pattern Recognition,2020: 2004.10934.
[15] WANG C Y, LIAO H Y M, WU Y H, et al.CSPNet: A New Backbone that can Enhance Learning Capability of CNN[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW).IEEE, 2020.
[16] DAI J,QI H,XIONG Y,et al. Deformable convolutional networks[C]//Proceedings of the IEEE international conference on computer vision,2017:764-773.
海洋石油勘探開發(fā)中,固定式導(dǎo)管架平臺(tái)是目前最為經(jīng)濟(jì)且技術(shù)最為成熟的平臺(tái)之一,導(dǎo)管架平臺(tái)開發(fā)的難點(diǎn)在于大型導(dǎo)管架的安裝,此類導(dǎo)管架下水的方式通常采用滑移下水。在這一過(guò)程中,搖臂作為重要的受力結(jié)構(gòu),承擔(dān)著為導(dǎo)管架提供支撐力和保護(hù)導(dǎo)管架主體結(jié)構(gòu)的重要作用,是保證下水成功的關(guān)鍵。搖臂在導(dǎo)管架下水過(guò)程中隨水平角度的變化而發(fā)生翻轉(zhuǎn)運(yùn)動(dòng)。然而,由于搖臂通常重量較大,導(dǎo)致?lián)u臂復(fù)位成為一個(gè)挑戰(zhàn)性任務(wù),需要綜合考慮安全、穩(wěn)定和效率等因素。這種導(dǎo)管架滑移下水后搖臂的復(fù)位問(wèn)題,不僅對(duì)駁船自身的強(qiáng)度提出了更高的要求,也對(duì)搖臂復(fù)位技術(shù)提出了更為精確和嚴(yán)格的要求。那么該類搖臂使用什么方法復(fù)位,如何更高效,更安全復(fù)位,就成為了工程實(shí)際中急需解決的問(wèn)題。
1? 背景介紹
導(dǎo)管架滑移下水是海洋石油勘探開發(fā)中常用的下水方式之一,它具有成本低、操作簡(jiǎn)單、適用范圍廣等優(yōu)點(diǎn)。然而,滑移下水的過(guò)程中,導(dǎo)管架及其附屬結(jié)構(gòu)所承受的力學(xué)性能要求極高,其安全性和穩(wěn)定性是下水成功的重要保障。搖臂作為導(dǎo)管架的一個(gè)重要受力結(jié)構(gòu),承擔(dān)著支撐導(dǎo)管架和保證下水成功的關(guān)鍵作用。
在現(xiàn)有的搖臂復(fù)位方法中,常規(guī)的方法需要大量人力和物力,操作風(fēng)險(xiǎn)高;而自動(dòng)化復(fù)位方法雖然可以提高效率,但需要高成本的設(shè)備支持,對(duì)于很多企業(yè)而言難以承擔(dān),而且自動(dòng)復(fù)位方案還有搖臂與導(dǎo)管架主體結(jié)構(gòu)碰撞的風(fēng)險(xiǎn)[1]。本研究以駁船海洋石油229為例,針對(duì)搖臂復(fù)位問(wèn)題,通過(guò)復(fù)位方案和工具的優(yōu)化設(shè)計(jì),并通過(guò)實(shí)際操作驗(yàn)證復(fù)位效果,旨在提供一種可靠有效的解決方案,為滑移下水過(guò)程中搖臂復(fù)位帶來(lái)創(chuàng)新思路和方法。
新設(shè)計(jì)搖臂復(fù)位專用門字框?qū)蚪Y(jié)構(gòu)。系固纜系固于搖臂首部吊軸,由麻繩固定在搖臂上,待導(dǎo)管架下水后,系固纜另一端通過(guò)八字扣連接過(guò)橋纜,過(guò)橋纜上端通過(guò)鉤頭纜由浮吊船起吊,起吊力通過(guò)門字框發(fā)生變向,從而完成搖臂復(fù)位。
2? 方案介紹
2.1? 復(fù)位方案所需結(jié)構(gòu)與物料
方案中主要構(gòu)成要件如圖1所示。
海洋石油229:運(yùn)輸駁船,負(fù)責(zé)導(dǎo)管架的運(yùn)輸,滑移下水等工作。其參數(shù)見表1。
海洋石油201:負(fù)責(zé)提供復(fù)位力。其參數(shù)見表2。
搖臂:在導(dǎo)管架滑移下水時(shí)能夠隨導(dǎo)管架水平角度的變化而翻轉(zhuǎn),從而分散導(dǎo)管架局部應(yīng)力,減小壓強(qiáng),保護(hù)導(dǎo)管架主體結(jié)構(gòu)[2]。
門字框:改變復(fù)位力方向,作用相當(dāng)于定滑輪。
系固纜:?椎80×28 m高強(qiáng)纜,一端系固于搖臂首部吊柱,沿?fù)u臂預(yù)布,用麻繩固定,另一端固定于甲板。待導(dǎo)管架滑移下水后,與過(guò)橋纜用“八字扣”連接。
過(guò)橋纜:?椎80×20 m高強(qiáng)纜,連接系固纜與鉤頭纜。
鉤頭纜:?椎80×10 m高強(qiáng)纜,上端直接連接鉤頭,下端通過(guò)150 t卡環(huán)連接過(guò)橋纜。
2.2? 復(fù)位方案
在本方案中,系固纜從門字框中通過(guò),門字框起到萬(wàn)向滑輪的作用。頂部滑動(dòng)滾軸套在門字框上,以減小纜繩與門字框之間的摩擦。此外,為了避免卡環(huán)無(wú)法通過(guò)門字框的問(wèn)題,系固纜和過(guò)橋纜采用了“八字扣”連接方式。綜合HYSY229船艉處甲板面布置,基于DP動(dòng)力定位浮吊船進(jìn)行的搖臂復(fù)位作業(yè)的特點(diǎn),考慮復(fù)位過(guò)程中搖臂受力分析,復(fù)位門字框設(shè)計(jì)結(jié)構(gòu)形式如圖2所示。門字框布置在駁船滑道的兩端,整體布置如圖3所示。
搖臂復(fù)位詳細(xì)過(guò)程如下。
1)隨著導(dǎo)管架完成滑移下水,搖臂傾斜到最大角度85°,此時(shí)系固纜經(jīng)由八字扣形式連接到過(guò)橋纜,過(guò)橋纜上端用卡環(huán)連接鉤頭纜,鉤頭纜上部連接到提升鉤頭。如圖4所示。
在工程實(shí)際中因?yàn)榭ōh(huán)體積過(guò)大難以通過(guò)門字框,因此,使用八字扣連接(圖5)系固纜和過(guò)橋纜,簡(jiǎn)化施工過(guò)程,且有效地減少了摩擦力。
2)提升鉤頭力,扯斷系固纜固定麻繩,使八字扣通過(guò)門字框。如圖6所示。
3)繼續(xù)提升鉤頭力,浮吊提供的復(fù)位力逐漸將搖臂復(fù)位,在這個(gè)過(guò)程中回復(fù)力為搖臂浮力和纜繩拉力,傾斜力為搖臂結(jié)構(gòu)重力和搖臂內(nèi)水重力,圖7所示時(shí)刻為搖臂與水線面夾角45°。
隨著搖臂角度逐漸回復(fù),鉤頭施加的回復(fù)力與搖臂接近垂直,拉力力矩達(dá)到最大值,浮力逐漸減小。搖臂的傾斜力包括搖臂重力和壓載水重力力距也在逐漸減小。圖8所示為搖臂與水平面角度為30°。
角度減小到30°以下,重心位置回落到駁船一側(cè),重力變?yōu)榛貜?fù)力,浮力完全消失,傾斜力為搖臂水重力。繼續(xù)提升鉤頭高度,載荷逐漸減小,直至搖臂水平,此時(shí)搖臂復(fù)位完成。如圖9所示。
2.3? 關(guān)鍵節(jié)點(diǎn)計(jì)算
為了分析搖臂的受力狀態(tài),本研究選取85°、45°、30°和0° 4個(gè)關(guān)鍵節(jié)點(diǎn)作為樣本,計(jì)算搖臂上的各個(gè)作用力,包括搖臂自身重力、進(jìn)水艙內(nèi)水的重力、搖臂浸水部分的浮力、浮吊提供的復(fù)位力,以及轉(zhuǎn)軸處駁船提供的支持力。其中搖臂的重心X=FR0+1 967 mm;Y=0;Z=13 434 mm,其總重量為716 724 kg。搖臂重心位置如圖10所示。
搖臂各部分構(gòu)件的重量重心見表3。
以搖臂處于45°時(shí)的狀態(tài)為例,搖臂受力分析如圖11所示。
根據(jù)力矩平衡原理,浮吊的提升力P=(G1×L1+G2×L2-G3×L3)/L,具體受力計(jì)算見表4。
浮吊所能提供的最大拉力為800 t,遠(yuǎn)高于所需的浮吊提升力,符合工程要求。
為了確保門字框足夠強(qiáng)度以承受負(fù)荷,本文使用ANSYS進(jìn)行有限元分析,進(jìn)行強(qiáng)度校核[3]。將250 t的負(fù)荷施加到框架平面偏轉(zhuǎn)18°的方向上,結(jié)果顯示極限強(qiáng)度因子UC為0.90,強(qiáng)度滿足工程要求[4]。
2.4? 優(yōu)勢(shì)分析
相比于原方案[5],采用絞車+滑輪組拉動(dòng)搖臂進(jìn)行復(fù)位的方法,通過(guò)液壓絞車拖動(dòng)滑輪組,帶動(dòng)纜繩,作用力于系固纜柱。本研究提出的新方案采用了更加簡(jiǎn)潔有效的復(fù)位方案和更少量的作業(yè)工具,剔除絞車滑輪組進(jìn)行的拖拉作業(yè),避免因復(fù)位纜剮蹭搖臂而使復(fù)位方案失效,避免了因兩側(cè)絞車操作誤差而受力不均,從而大大縮短了作業(yè)時(shí)長(zhǎng),降低了作業(yè)耗費(fèi)的資源和成本,用時(shí)消除原方案存在的隱患。同時(shí),新方案的工具設(shè)計(jì)更加合理,避免了復(fù)位纜繩與搖臂固定筋板干涉的問(wèn)題,提高了復(fù)位效果和安全性。綜合來(lái)看,新方案具有操作簡(jiǎn)便、耗費(fèi)資源少、成本低廉等優(yōu)點(diǎn),為搖臂復(fù)位問(wèn)題的解決提供了更加可靠和有效的方案和工具。
3? 結(jié)論
本研究以海洋石油229為例,以陸豐12-3項(xiàng)目為依托,對(duì)搖臂復(fù)位方法進(jìn)行了優(yōu)化設(shè)計(jì),并通過(guò)實(shí)際操作驗(yàn)證了此方案的可行性。結(jié)果表明,本文提出的優(yōu)化復(fù)位方案和工具可以有效地解決搖臂復(fù)位過(guò)程中的問(wèn)題,與原方案對(duì)比具有高效率、低成本、低風(fēng)險(xiǎn)的特點(diǎn),并且具有較高的安全性和可操作性[6]。此外,本研究對(duì)海洋石油勘探開發(fā)領(lǐng)域中的搖臂復(fù)位現(xiàn)存問(wèn)題進(jìn)行了深入探討和分析,并提出了可靠的解決方案和創(chuàng)新思路。這些成果不僅為搖臂復(fù)位問(wèn)題的解決提供了一種新的思路和方法,同時(shí)也為滑移下水過(guò)程中的安全穩(wěn)定運(yùn)行提供了一定的參考和借鑒價(jià)值。
綜上所述,本研究對(duì)于海洋石油勘探開發(fā)領(lǐng)域中的搖臂復(fù)位問(wèn)題的解決具有一定的實(shí)際應(yīng)用和推廣價(jià)值,為日后同類的搖臂復(fù)位作業(yè)提供了寶貴的經(jīng)驗(yàn)和思路。
參考文獻(xiàn):
[1] 劉玲.導(dǎo)管架下水后駁船搖臂運(yùn)動(dòng)與自動(dòng)復(fù)位研究[D].天津:天津大學(xué),2009.
[2] 樊之夏.深水導(dǎo)管架安裝研究[J].中國(guó)海洋平臺(tái),2003(2):29-31.
[3] 梁學(xué)先,張永國(guó),何敏,等.MOSES軟件在大型導(dǎo)管架海上安裝分析中的應(yīng)用[J].中國(guó)造船,2012,53(S2):362-371.
[4] 環(huán)境條件和環(huán)境荷載規(guī)范:SY/T 10050—2004[S].
[5] 邵亮亮,魏佳廣,劉濤,等.牽引系統(tǒng)輔助工程駁船搖臂復(fù)位研究[J].石油工程建設(shè),2018,44(1):27-29,35.
[6] 侯金林,于春潔,沈曉鵬.深水導(dǎo)管架結(jié)構(gòu)設(shè)計(jì)與安裝技術(shù)研究——以荔灣3-1氣田中心平臺(tái)導(dǎo)管架為例[J].中國(guó)海上油氣,2013,25(6):93-97,127.
猜你喜歡
中國(guó)教育技術(shù)裝備(2016年19期)2016-12-27 19:23:52
中國(guó)遠(yuǎn)程教育(2016年11期)2016-12-27 18:07:31
現(xiàn)代商貿(mào)工業(yè)(2016年25期)2016-12-26 09:58:02
江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:36:29
現(xiàn)代情報(bào)(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時(shí)代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(huì)(2016年32期)2016-12-01 15:25:53
軟件導(dǎo)刊(2016年9期)2016-11-07 22:20:49