基于改進支持向量回歸的空戰飛行動作識別 *
2024-03-18 07:22:14劉慶利李蕊喬晨昊
現代防御技術 2024年1期
劉慶利,李蕊,喬晨昊
(大連大學 通信與網絡重點實驗室,遼寧 大連 116622)
0 引言
空軍的強大是一個國家強大的重要體現,空軍是否強大取決于飛機的質量和飛行員的作戰經驗,所以通過一些方法使飛行員與飛機進行有效的溝通,是現代戰斗機的發展方向。當今空戰不僅僅是機炮、導彈等熱兵器的對決,更為重要的是電子戰,如何有效提升信息的獲取是本文研究的方向,而準確的獲取自身和敵機的飛行狀態是獲取有效信息最為關鍵的一環。
近幾十年來,隨著科技的發展,出現了越來越多的飛機飛行動作的識別方法,主要有:支持向量機、聚類、神經網絡、狀態規則匹配法等智能算法。文獻[1]采用基于聚類的方法,先提取飛行數據的主要參數,通過趨勢識別后得到的機動片段進行聚類劃分,缺點在于趨勢識別的機動片段難以捕捉準確的機動片段,會對聚類的結果有影響;文獻[2]采用模糊支持向量機算法(fuzzy support vector machine,FSVM),解決了支持向量機在處理多分類任務時出現的不可分區域問題,對分類的結果有一定準確性,但是受限于支持向量機的參數c和g,如果參數不能很好地優化,得到的模型也必然大打折扣;文獻[3]整體采用神經網絡的方法進行分類,對飛行數據的處理采用微分分割的思想建立神經網絡的輸入,缺點在于神經網絡需要大量的數據來支持模型,對于較難獲得的飛行數據來說,大量數據的獲取是關鍵性問題;文獻[4]采用支持向量機模型,對飛行數據采用狀態匹配的方法進行處理,但是處理方法需要人工識別,會導致無法實時地進行處理,也會給飛行員與飛機的交互造成一定程度的障礙;文獻[5]采用決策樹模型,對飛機飛行的動作先進行分類再進行識別,是一個實時的系統模型,它可以利用真實數據進行動作識別,但效率較低,在瞬息萬變、講求效率的戰場上,采用離線的、訓練好的模型會極大縮短時間,提高效率;文獻[6]采用C-支持向量機模型,先對飛行數據進行降維處理,再將處理后的數據進行模型化訓練,缺點在于C-支持向量機模型對多分類問題表現仍然不夠理想;文獻[7]采用智能算法對飛行規則進行提取,提出了映射突變機制,對目標函數的優化效果較為理想,該方法對于飛行規則提取是可行的,但對于飛行動作識別是遠遠不夠的,需要聯合人工智能算法實現;文獻[8]采用建立知識庫的方式對飛行動作進行匹配,這種方法對于已有的飛行動作可以進行大概的匹配,對于要求較為苛刻的空戰和未知的飛行動作則顯得難以駕馭;文獻[9]采用樽海鞘群優化算法對飛行數據進行提取和匹配,但該算法僅對于部分動作有較好的效果,不具有通用性,難以滿足現代化空戰的需要;文獻[10]采用動態時間調整與馬爾可夫算法相結合的方法,對于實時性的表現較好,但是對于復雜的機動識別,應提前建立離線的知識儲備庫來應對。
綜上所述,主要存在以下幾點問題:一是現有識別方法處理飛行數據的能力存在不足,對于復雜的飛行動作,僅由基本動作組成的方式處理數據是遠遠不夠的,相似的動作極易發生識別錯誤的情況;需要對輸入數據根據規則進行逐一判斷,當需要處理批量數據時,所需識別時間較長;二是識別飛行動作的準確率還存在提升的空間,因此非常有必要提高模型的分類能力和回歸能力,并提高判斷識別的準確度,所以對空戰中飛機的飛行動作識別的研究是非常有意義的。針對以上問題,本文采用麻雀搜索算法(sparrow search algorithm,SSA)和支持向量回歸算法(support vector regression,SVR)相結合的方式,提出了強化麻雀搜索支持向量回歸(intensify SSA-SVR,ISSA-SVR)的識別方法,采用高斯核函數作為線性核函數[11],同時利用混沌初始化和小孔成像反向學習策略優化麻雀搜索算法,并利用優化后的麻雀搜索算法對支持向量回歸算法的高斯核函數參數進行優化,使其找到最優解,從而達到識別準確的效果。
1 空戰飛行態勢數據預處理
根據戰斗機的實際飛行軌跡和飛行姿態可以將飛機的機動動作看作是一系列復雜的機動動作,而復雜的機動動作又可以分解為一系列具有時間序列的基本飛行動作[12-15]。國際上較為認可的是美國國家航空咨詢委員會NASA 提出的7 種基本動作:原狀態飛行、加速直線飛行、減速直線飛行、左轉飛行、右轉飛行、爬升飛行、俯沖飛行。本文將這7 種基本動作歸納為平飛、俯沖、轉彎、橫滾和爬升五大類。
要對飛機動作進行識別,首先要將飛行動作分解成一系列計算機可識別的數據,該過程是由人工完成的,識別出來的數據是一系列具有時間序列的飛行片段[16-20]。而基本動作也可以分解成不同飛行參數的組合,本文主要研究的飛行參數包括:偏航角ψ、滾轉角Φ、俯仰角γ和高度h,基本動作與飛行參數的關系由表1 所示。
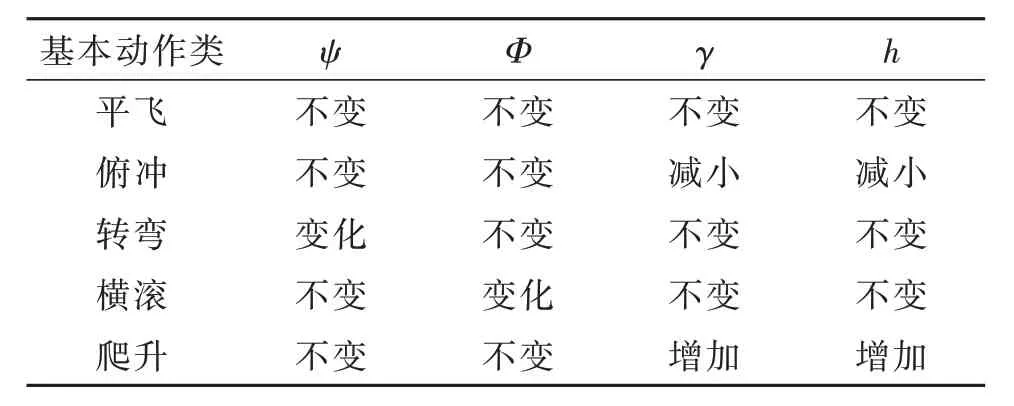
表1 基本動作與飛行參數的關系Table 1 Basic flight action division
基本動作往往只是最基本的飛行方式,遠遠不能滿足空戰的需要,而飛行員需要掌握復雜的飛行方式,尤其是優秀的飛行員可以熟練使用各種復雜的飛行方式。本文研究的復雜飛行動作有:斤斗、半滾倒轉、水平橫滾、上升轉彎、俯沖轉彎、半斤斗倒轉和急規避轉彎7 種,其編號和動作組成如表2所示。

表2 復雜飛行動作描述Table 2 Description of complex flight movements
以半斤斗倒轉為例,將機動動作可以拆分為3類片段:爬升、平飛和橫滾。這些動作對于飛行員而言,是最基本的飛行態勢,但不會保持一個固定的參數,會允許該參數在一個小范圍內浮動。
對于復雜的飛行動作,僅僅由基本動作組成的方式處理數據是遠遠不夠的,相似的動作極易發生識別錯誤的情況,這種情況是災難性的,因此準確識別一個復雜動作還需要對變化量及其他條件進行限制。本文對復雜動作進行如下處理:
(1)對于飛行過程中,飛機航向角由350°變為0°的這種極端情況,飛行實際上只變化了10°,但是計算機處理時,會認為轉彎了340°,由此對飛行參數進行條件限制,角度的變化量為
(2)對于爬升轉彎和俯沖轉彎,角度的變化量都是相似的,計算機很難識別飛機的飛行姿態,所以對于高度而言,爬升是正變化量,俯沖是負變化量,假設高度變化量為Δh,爬升則是+Δh,俯沖則是-Δh。
(3)對于俯仰角,其變化量不超過90°,否則會造成失速,導致飛機處于危險的情況,假設俯仰角變化量為Δγ,則Δγ< 90°。
2 改進支持向量回歸算法
2.1 支持向量回歸算法
SVR 是從支持向量機算法(support vector machine,SVM)中衍生出來的,主要針對的是回歸問題。通過SVR 算法,可以找到一個回歸平面并使得一個集合中的所有數據距離該平面的距離最短。SVR 的模型是一個線性函數f(x) =wTx+b,w和b為不確定的參數,區別于線性回歸的地方在于損失函數和目標函數,SVR 在線性函數兩側制造出一個邊緣界限,所有落入其中的樣本,都不計算損失,這樣通過與邊緣界限的距離與總的損失來優化模型,達到最優的效果。SVR 的數學模型:;前一部分表示優化目標;后一部分表示代價函數;c為懲罰因子;m為樣本個數。損失函數為
式中:ε為線性函數;f(x)與邊緣界限的距離;|z|為線性函數f(x)與樣本點之間的距離。
此時的模型還不是最優模型,需要加入松弛變量ξi和進行優化,得
其中:ξi為隔離帶上邊緣之上樣本點的縱坐標值,與對應橫坐標在“上邊緣超平面”上投影的差;而為隔離帶下邊緣之下樣本點,到隔離帶下邊緣上的投影,與該樣本點縱坐標值的差。
在此基礎上再次引入拉格朗日乘子μi,,ai,得
使得式(4)左邊對各參數的偏導為0,得
滿足最優解就需要滿足KKT 條件,即
最終得到最優解為
式中:為SVR 較為優秀的高斯核函數。
2.2 強化麻雀搜索算法
麻雀搜索算法雖然具有流程簡單、尋優能力強、收斂速度快的優點,但與其他的智能優化算法一樣,麻雀搜索算法自身也有一定的局限性,因此,本文先對麻雀搜索算法進行以下幾方面改進。
2.2.1 混沌初始化
借助Logistic 映射產生的混沌序列可以解決初始值不敏感的問題,本文利用Logistic 混沌策略來初始化麻雀種群,既可以使種群更加全面地對空間進行搜索,又可以解決因初始值選擇不合適而使搜索時間延長的問題。Logistic 混沌策略如下:
式中:X為混沌變量;λ為混沌系數,當λ= 4 時混沌變量X處于全混沌狀態。給X賦一個初值x0,便可產生一個麻雀的中期序列[x1,xm],這個序列就是一個混沌變量,該序列一直迭代下去可不重復地遍歷混沌范圍。
2.2.2 強化反向學習策略
在混沌初始化之后開始迭代發現者的階段,當R2<ST時,麻雀的數量以及多樣性會逐步減少,這意味著該算法會隨著麻雀數量的減少而陷入局部最優,其中,R1,R2∈[0,1)為預警值;ST∈[0.5,1)為安全值。因此利用類似小孔成像的方式,將反向原理運用到學習策略中解決麻雀搜索算法的問題,如圖1 所示。
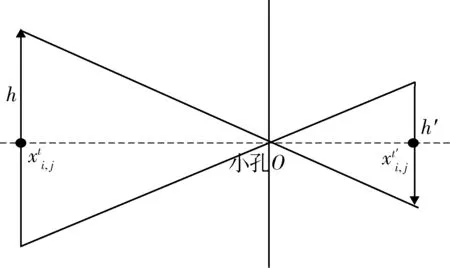
圖1 小孔成像反向學習原理圖Fig. 1 Schematic diagram of keyhole imaging reverse learning
假設每只麻雀位置變化的范圍是[ai,bi],高度為h的火焰在x軸上的投影為麻雀種群中發現者的位置,其透過小孔成像得到一個高度為h′的倒影,此時的橫坐標為,由三角形相似原理可得
當k= 1 時,可得
k= 1 時,小孔成像反向學習就退化為基本的反向學習策略,此時解為固定解,而小孔成像的策略可以通過比例系數k來調整解的空間,得到更完全的解。
本文利用改進后的反向學習策略更新發現者的位置,通過式(8)映射到空間中得到最優解,將原本發現者位置的適應度值與改進后的適應度值進行比較,保留最優的適應度值。小孔成像反向學習策略可以大幅增加發現者的尋優方向,使每只麻雀可以在不固定的區域尋找最優位置,該策略大大增加了種群的多樣性,并增強了麻雀全局搜索的能力,減少局部收斂的概率。
2.3 強化麻雀搜索優化的支持向量回歸算法
本文利用強化麻雀搜索算法來優化支持向量回歸算法,形成新的算法:強化ISSA-SVR 算法。利用該算法的特點進行飛機飛行動作的預測與回歸,該算法由強化麻雀搜索算法和支持向量回歸兩部分組成:
(1) 輸入:處理飛行數據,進行歸一化處理;
(2) 構建預測與回歸的支持向量回歸算法;
(3) 利用ISSA 優化SVR 的目標函數,其中包括確定麻雀的參數、混沌初始化麻雀的位置、利用小孔成像原理更新發現者的位置、躲避發現者的位置。
(4) 計算最佳適應度函數,滿足目標則停止迭代,否則繼續執行3)
(5) 輸出:得到最優的SVR 的參數c和g,并以此建立最終的預測與回歸的模型,并得到識別的準確率。
ISSA-SVR 的算法迭代圖如圖2 所示。
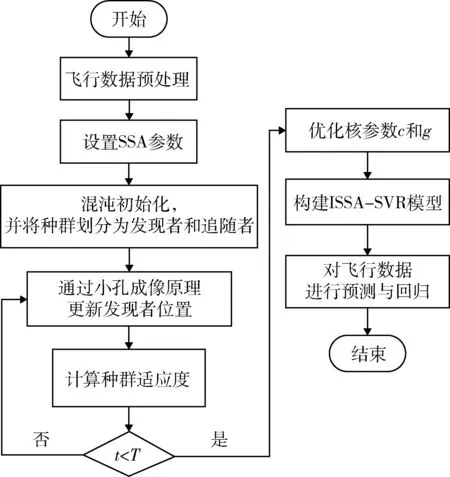
圖2 ISSA-SVR 算法流程圖Fig.2 ISSA-SVR algorithm flow chart
3 仿真校驗
本文采用識別動作的準確率來對算法進行評價,準確率=正確識別的飛行動作個數/輸入的飛行動作總和,首先進行參數設置,選取好參數后進行仿真,對基本動作和復雜動作都進行了仿真驗證,然后用相同的參數對SVM 算法、FSVM 算法、基于高斯混和模型的聚類算法(Gaussian mixture model,GMM)[20]以及基于自組織圖的人工神經網絡方法(neural gas)進行仿真對比。
3.1 參數設置
設置算法參數,對算法的最大迭代次數、種群數量、發現者占比、意識到危險的麻雀數量、懲罰因子、高斯核參數進行取值,具體參數設置如表3所示。
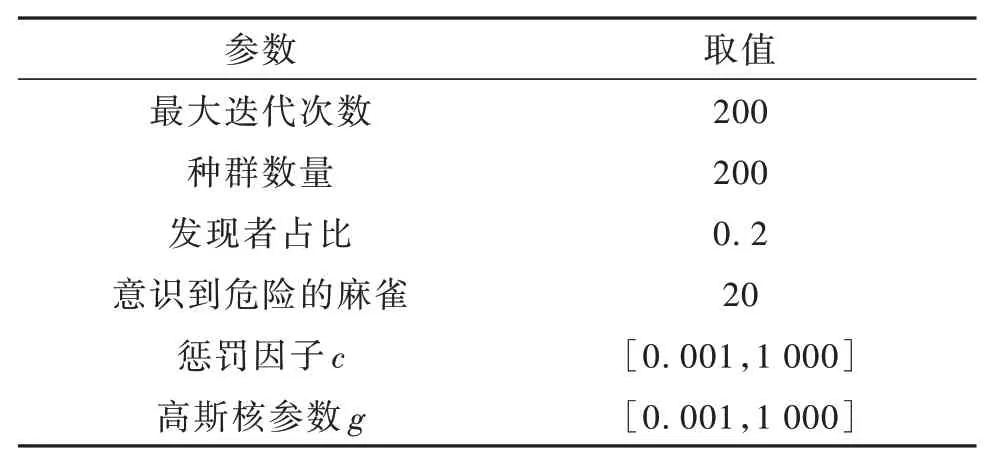
表3 ISSA-SVR 參數設置Table 3 ISSA-SVR parameter setting
3.2 基本動作仿真分析
如表4 所示,ISSA-SVR 對平飛、俯沖、轉彎、橫滾、爬升等飛行基本動作的識別率最低達到了99.03%,最高達到了100%。
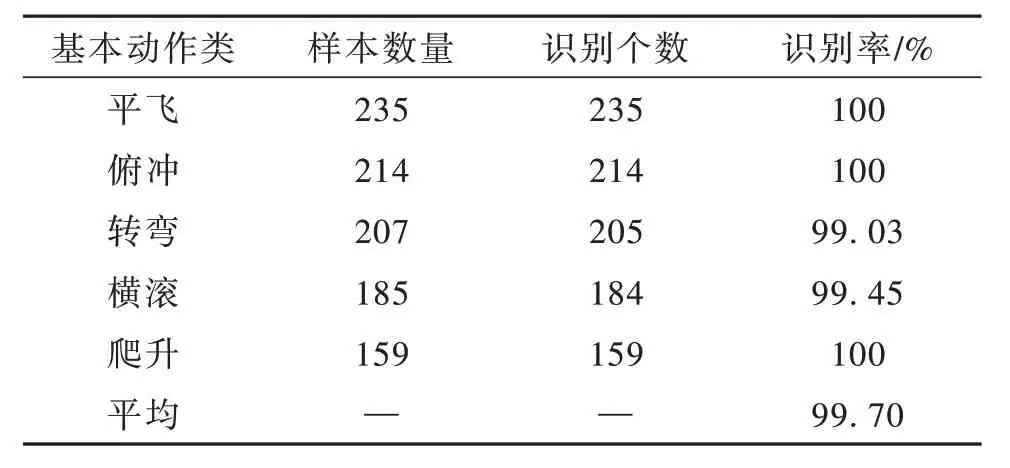
表4 ISSA-SVR 對基本動作的識別率Table 4 ISSA-SVR recognition rate of basic actions
從圖3 可以明顯看出,ISSA-SVR 算法相較其他幾種算法對基本動作識別的準確性有了明顯提高。ISSA-SVR 算法對基本飛行動作的平均識別率為99.7%,SVR 算法、FSVM 算法、GMM 算法以及Neural Gas 算法的平均識別率分別為97%,97.5%,88.72%,92.34 %。相較之下,ISSA-SVR 算法對基本飛行動作的平均識別率至少提升了2.2%。
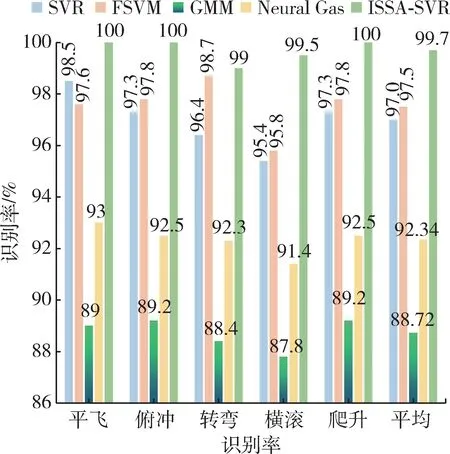
圖3 5 種算法的基本動作識別率Fig. 3 Basic action recognition rate of five algorithms
3.3 復雜動作仿真分析
如表5 所示,ISSA-SVR 對飛行復雜動作的平均識別率為95.3%,相較于簡單動作,識別率有所降低,這是因為復雜的飛行動作的時間序列連貫性較高,在短時間內會產生多個基本動作,導致識別率下降。斤斗、半滾倒轉、半斤斗倒轉動作的識別率分別為93.0%,87.5%,94.5%,相較其他復雜動作識別率偏低,這是因為本文采用的是高斯核函數,對非線性的飛行動作識別率會有所降低。
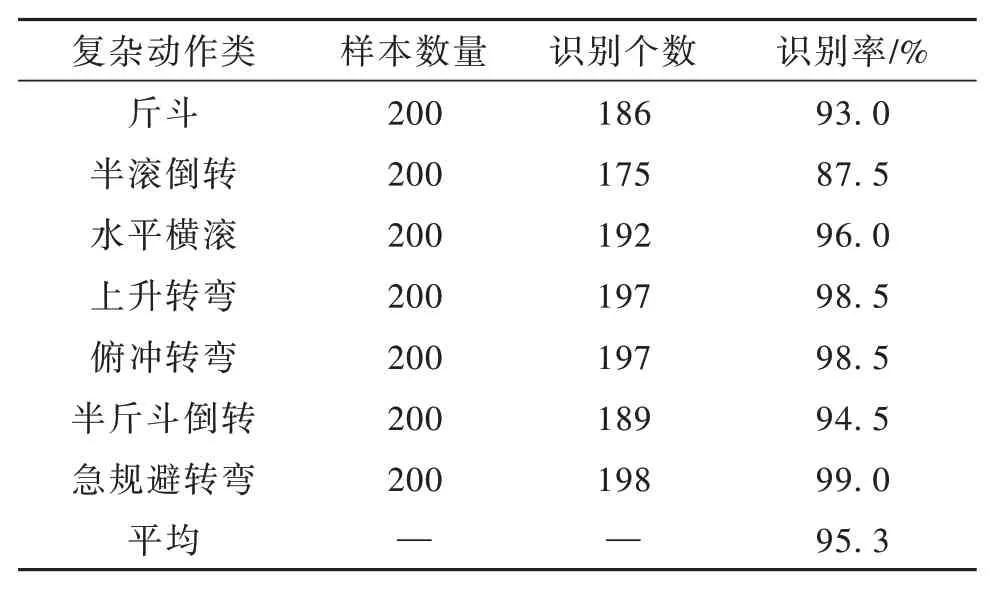
表5 ISSA-SVR 對復雜動作的識別率Table 5 ISSA-SVR Recognition rate of complex actions
從圖4 可以明顯看出,在對復雜動作的識別中,ISSA-SVR 算法依舊保持優勢,這是因為ISSA-SVR算法前期是由ISSA 進行目標函數優化的,得到的最優解遠好于其他幾種算法。幾種算法對復雜飛行動作的平均識別率分別為95.3%,90.8%,91.6%,87%,78.1%。ISSA-SVR 算法對比其他兩種算法的平均識別率至少提升了3.7%。

圖4 5 種算法的復雜動作識別率Fig. 4 Complex action recognition rate of five algorithms
3.4 態勢識別結果分析
根據圖3,4 可以得出以下結論:
(1)對于簡單的飛行動作,幾種算法的識別率都非常高,識別率幾乎接近100%,因為基本的飛行動作時間序列較為連貫,不易出現短時間內產生多個飛行片段的現象,ISSA-SVR 在識別基本動作時略好于其他幾種算法。
(2)對于復雜的飛行動作,幾種算法的識別率有所下降,這是因為復雜飛行動作的時間序列連貫性較高,在短時間內會有多個飛行片段,產生多個基本動作,在復雜的飛行動作下,由于SVR 會由ISSA 進行目標函數優化,得到的最優解遠好于其他幾種算法,識別率也有較大的提升。
(3)對于斤斗、半滾倒轉、半斤斗倒轉等動作的識別率相較其他復雜動作識別率偏低,是由于幾種算法均采用的是線性核函數,對非線性的飛行動作識別率會有所降低。
4 結束語
針對傳統算法識別飛機的飛行動作精確度低的問題,本文采用支持向量回歸算法,解決了普通的支持向量機在處理多分類任務時出現不可分區域的問題,從而有效解決了飛行動作分類與回歸的問題,在此基礎上使用強化麻雀搜索算法優化了支持向量回歸算法,使得支持向量回歸算法的精確度有了一定的提升。仿真結果表明,ISSA-SVR 算法較SVR 算法、FSVM 算法、GMM 聚類算法以及神經網絡算法在識別飛機飛行動作的準確率上有所提升,尤其是對復雜動作的識別率有大幅度的提升。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41