直流充電樁電能計量關鍵技術設計
2024-03-14 09:08:52李雪城潘全成
自動化儀表 2024年1期
關鍵詞:交流
李雪城,趙 成,仝 霞,靳 陽,潘全成
(國網北京市電力公司電力科學研究院,北京 100051)
0 引言
直流充電樁在人們生活中發揮著至關重要的作用。現有技術在電動汽車直流充電樁充電時,存在以下技術弊端。
①計量方法問題。充電樁大部分采用交流充電的方法,因此存在電壓不穩定、誤差精度高、測量效率低的問題。計量誤差過高容易給直流充電樁帶來沉重的負擔。
②電源供源不穩定。電能計量裝置存在穩定性差、計量精度低等實際問題。這使得直流充電樁在應用過程中的穩定性出現問題。
③充電速度慢。由于電動汽車直流充電樁在應用過程中需要較大功率,常規的電源難以滿足其充電速度快的需求。
④隨著電動汽車數量的增多,常規管理的方法難以實現遠程在線監控。一車一監會帶來沉重的運行壓力[1]。
基于上述弊端,文獻[2]采用Kriging-Krging偏最小二乘(Kriging partiol least squares,KPLS)法的直流充電樁現場檢定自適應補償方法。該方法通過使用Kriging插值法,在多維影響因素下,實現含有電壓電流誤差試驗數據點間的相關性及結構特征數據信息的分析;應用了電壓電流的誤差模型實現電壓電流數據信息的在線補償,減小了現場工況對檢定裝置的影響。但該方法無法實現計量與分析一體化,因此在應用過程中的抗干擾能力比較差。文獻[3]將STM32F107作為主控芯片,通過設置主控內核和控制中心,并構建多通道電流、電壓和功率的ADE7816計量芯片,使得充電和電能計量能力大幅提高。這種方法雖然能夠提高直流充電樁計量檢定效率,但是數據分析能力較差。文獻[4]通過引入基于多指標綜合評價方法的可持續評價指標體系,匯總多種數據信息,并提煉其影響因素。這種方法雖然提高了直流充電樁的應用能力,但評價指標的選擇和賦值受主觀因素影響較大,結果可比性差。
基于上述技術缺陷,本文針對直流充電樁計量方案進行了設計,通過BF533芯片及其外設有效地控制模數(analog-to-digital,A/D)采集電路。同時,本文還進行了電樁測試電源設計,通過增量補償控制輸出模塊有效地補償了電網電壓和實際輸出電壓的差值。
1 直流充電樁計量方案設計
本文利用直流充電樁的交流輸入作為三相電路,以及三相有功功率的瞬時值在理想的情況下等于三相有功功率平均值的特點,研制了基于硬件乘法器級聯原理的三相交流有功功率的瞬時值硬件電路[2-3]。該電路實現了交流有功功率在時域上的快速、精確獲取,且輸出為單一的直流信號,為雙通道模數轉換器(analog-to-digital converter,ADC)同步測量提供了輸出信號為μs級別(輸出精度比較高)的交流有功功率信號(帶紋波的直流信號)[4]。充電樁計量電路如圖1所示。
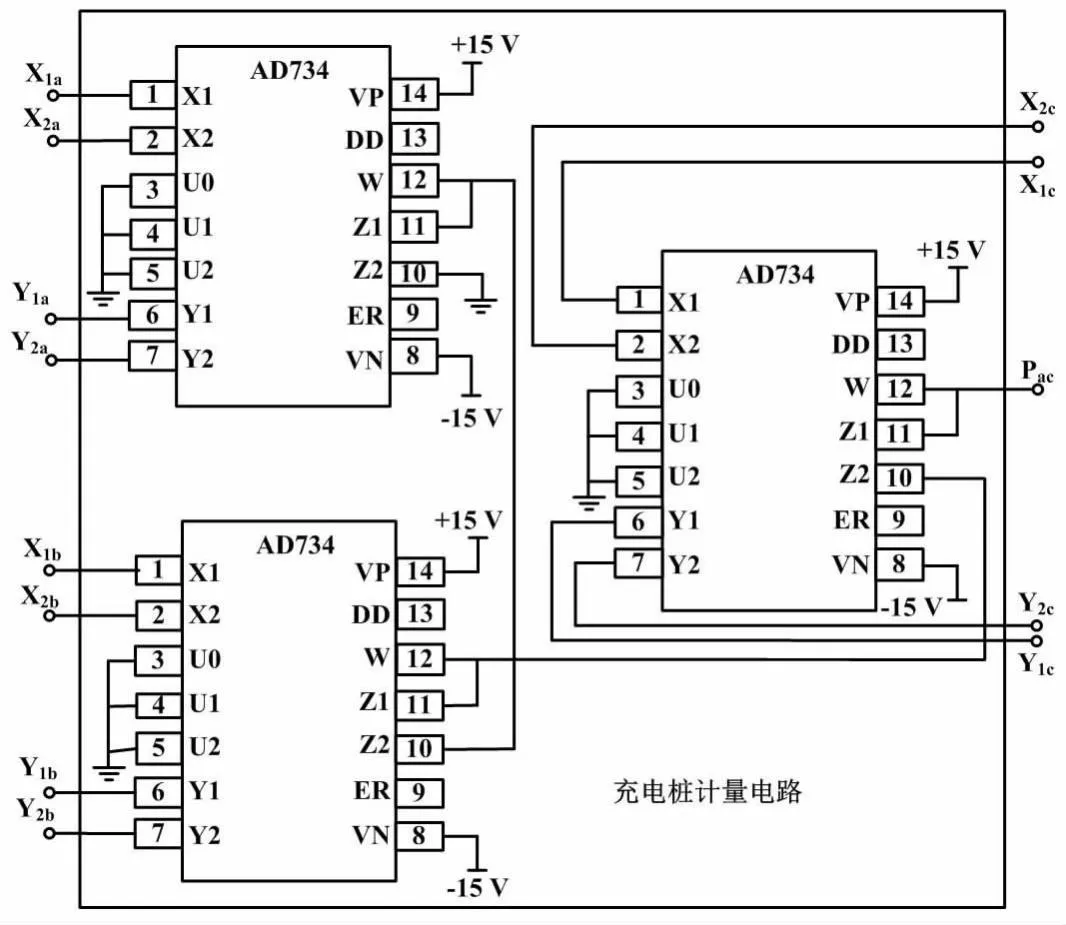
圖1 充電樁計量電路示意圖
由圖1可知:交流瞬時有功測量電路自動把三相交流有功功率轉換為1個帶紋波的直流輸出信號;直流瞬時有功測量電路自動把充電樁的直流輸出轉換為1個帶紋波的直流輸出信號[5]。BF533芯片及其外設控制A/D采集電路按1 MSPS的采樣率,同步采樣交流有功功率和直流有功功率[6]。
BF533芯片及其外設電路如圖2所示。
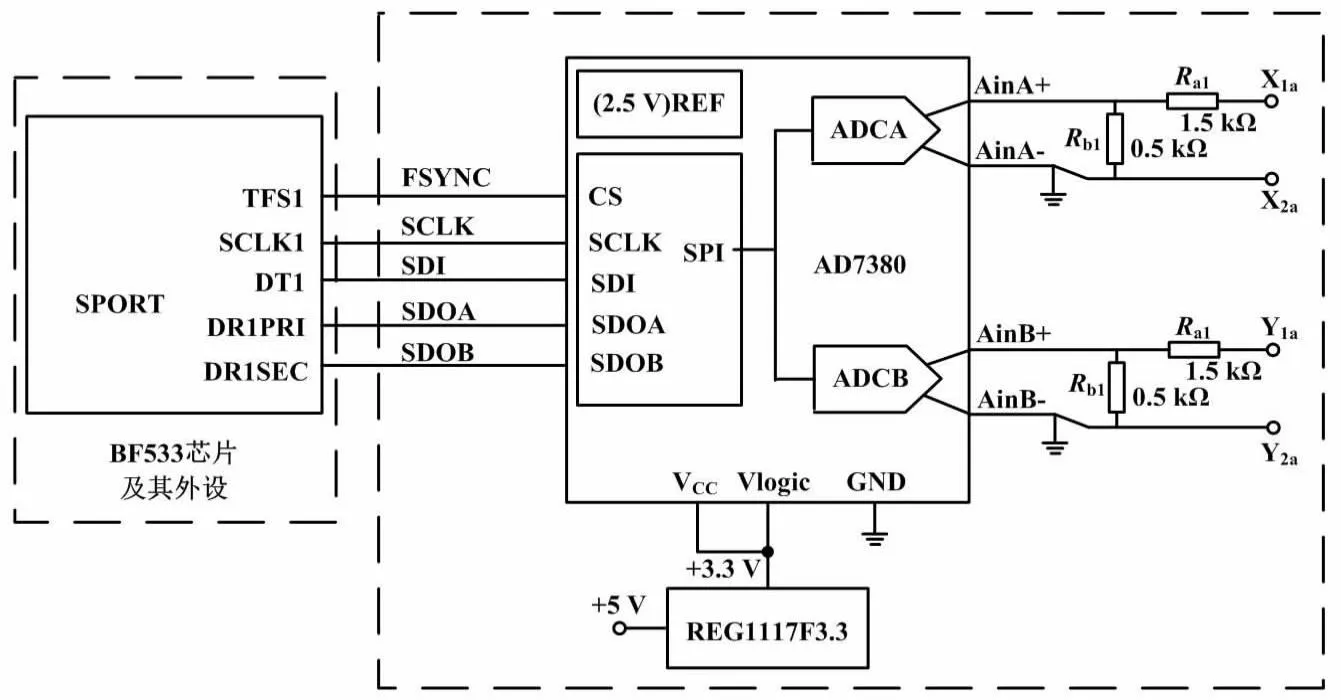
圖2 BF533芯片及其外設電路示意圖
BF533芯片每秒計算一次采樣效率。對于三相交流有功功率,其瞬時值實際上等于三相有功功率的平均值[7]。也就是說,其在理想的情況下輸出1個恒定的直流輸出信號。由于實際電壓波動和三相不平衡,其輸出帶紋波的直流輸出信號。
(1)
式中:uA為電壓的瞬時值;U為恒定直流電壓;ω為電能計量過程中電壓和電流輸出瞬時值的相位角;t為輸出時間。
(2)
式中:iA為電流瞬時值;I為恒定直流電流;φ為頻率角。
(3)
式中:PA為A相有功功率的瞬時值;PB為B相有功功率的瞬時值;PC為C相有功功率的瞬時值。
P=PA+PB+PC=3UIcosφ
(4)
式中:P為疊加的功率輸出總值。
(5)
式中:Pac為不同象限之間的數據計算功率值;Paci為交流瞬時有功采樣點;N為1 s的采樣點數,N=1 000 000。
(6)
式中:Pdc為直流輸出功率;Pdci為交互直流瞬時有功采樣點。
(7)
式中:η為充電機效率。
本文設計能夠嚴格地進行同步測量,消除信號非同步的誤差;同時,采用硬件乘法器原理和交直流零磁通傳感器,測量穩定且準確度高。
2 充電樁測試電源設計
本文通過增量補償控制輸出模塊,補償電網電壓和實際輸出電壓的差值,以實現電壓的穩定輸出和±15%的調節[8-9]。本文電源為基于數字調節的D類功率放大器(效率高)增量補償的充電樁測試電源[10]。測試電源設計如圖3所示。
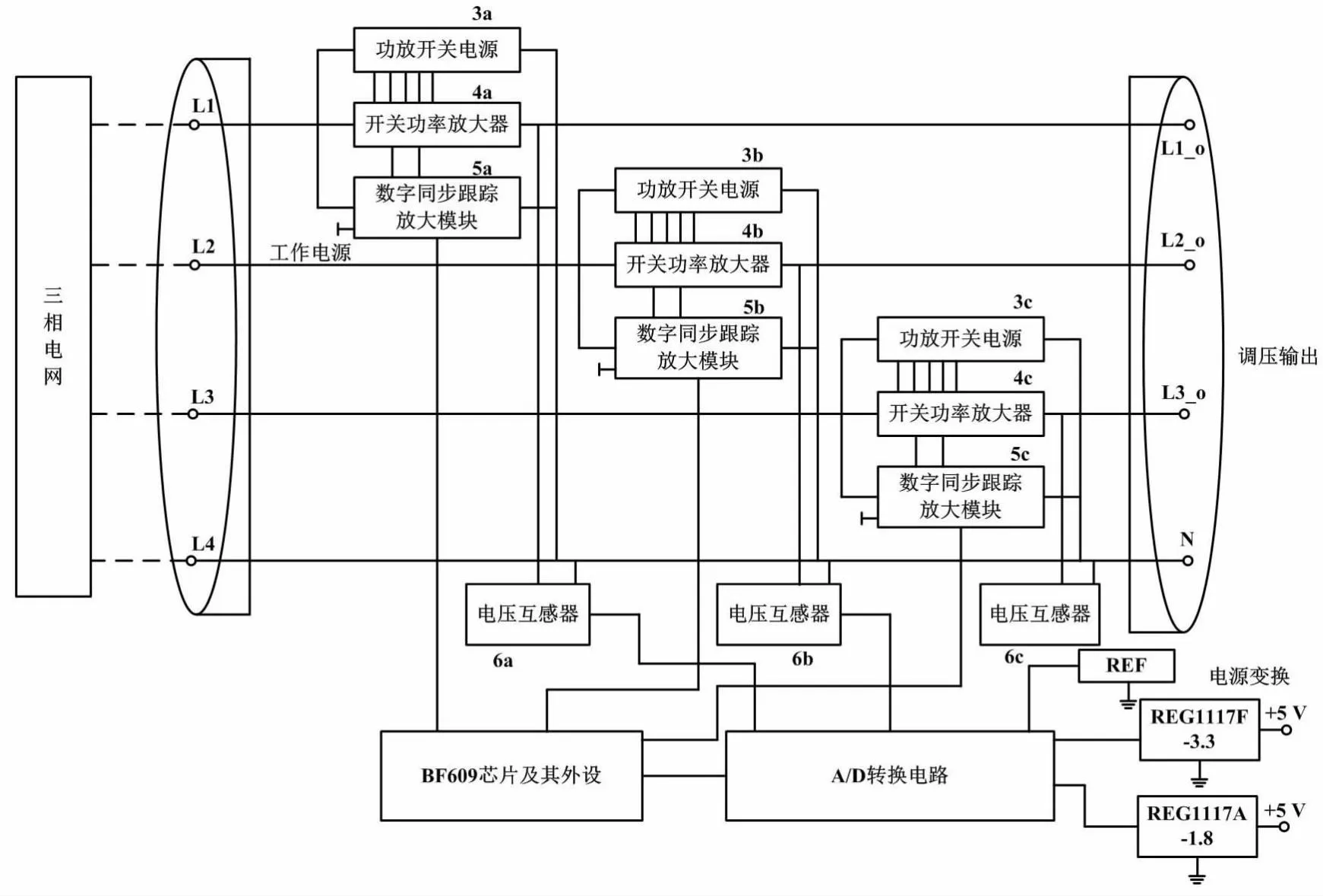
圖3 測試電源設計
測試電源設計中:交流供電插座為連接到三相電網的插座(200 A),為測試電源的輸出插座;電源模塊采用±15 V 和 5 V輸出的開關小電源;電流輸出為2 A;電壓互感器 6a/6b/6c 采用0.02級的電壓互感器[11]。電壓互感器的變比為220∶1,即220 V的電壓輸入的二次輸出為1 V。其帶負載能力為5 mA。電源變換器1為5 V轉3.3 V的線性穩壓模塊,即把5 V的電源轉換為3.3 V供BF609和ADC使用。該轉換采用固定電壓輸出芯片REG1117F-3.3實現。電源變換器2為5 V轉1.8 V 的線性穩壓模塊,即把5 V的電源轉換為1.8 V供BF609和ADC使用。該轉換使用固定電壓輸出芯片REG1117F-1.8實現[12-13]。參考電壓由芯片ADR441B輸出2.5 V的電壓值,溫度漂移優于3×10-6。A/D轉換電路采用24 bit的通道嚴格同步 sigma-delta ADC ADS1278。積分誤差典型值為±0.000 3%,最大采樣率為128 kSPS。BF609芯片及其外設由ADI公司的BF609芯片及其外設構成。芯片內置了大量的外設,包括2個串行外設接口(serial peripheral interface,SPI)、3個SPORT口、16個通用輸入/輸出(input/output,I/O)口、AMC接口(異步存儲接口)等[14]。顯示為液晶顯示模塊。其直接由BF609芯片及其外設通過AMC接口驅動顯示。鍵盤為簡易鍵盤,共6個鍵盤輸入到處理器BF609芯片及其外設的6個I/O上。功放開關電源3a/3b/3c用于給開關功率放大器4a/4b/4c供電,也可以和多種規格單獨的開關電源并聯使用。
電源在工作時,電壓互感器6a/6b/6c將三相交流電壓信號縮小220倍后輸入到A/D轉換電路的三個通道上。BF609及其外設控制A/D轉換電路以 12.8 kSPS的采樣率,通過連續不斷的方式采集電壓波形值,計算電壓幅值,并將計算值與設定值比較。其差值通過SPORT1、SPORT2、SPORT3口輸出到數字同步跟蹤放大器上[15]。
本文通過鍵盤KEY 10 手動輸入電源,并輸出設置值Uset(單位V,浮點存儲)。電源電壓一般為220 V。當測試輸入過壓保護試驗時,電源電壓設置為220×1.15=253 V。當測試輸入欠壓保護試驗時,電源電壓設置為220×0.85=187 V。BF609芯片及其外設通過A/D轉換電路采集并計算輸出的電壓值U。 BF609芯片及其外設計算差壓Ue=Um-Uset。差壓Ue乘以系數K(本文取K=100),得到16位有符號數deltaD=INT(Ue×K)。本文設數字同步跟蹤放大器的上一次數字值為Di-1,則本次設定值Di=Di-1+deltaD。Di通過SPORT1、SPORT2、SPORT3口輸出到數字同步跟蹤放大器[16]。
數字同步跟蹤放大器的數字值和Di的關系為:
(8)
式中:Uin為電壓互感器 501的二次輸出值,默認為 2.75 V,峰值為3.89 V;S為16 bit的無符號數值,取值為0~65 535。
當S為有符號數且剛好是大于32 768的值時,S為負值。當Ue為負值時,應該補償為正值。Ue可代入式(1)進行補償。K值為研究的關鍵。K的取值越大,則調整速度越快。但這容易超調,會降低輸出穩定度。K的取值越小,則調節越穩定。但這會導致調整速度慢[17-18]。本文取K值為100、計算窗口時間為100 ms。假如差壓為最大值33 V,則輸出最大值為32 768。其大概需要10個循環就可以控制到接近設定值。10個循環的時間為1 s,可以滿足調節速度要求。假如差壓很小(0.5 V),可以在100 ms內實現快速調節,以保證源輸出的穩定度。取K值為100兼顧了跟蹤放大器的快速調節和穩定性。
通過上述設計,本文只需要控制增量部分的能量,就可以實現±0.5%的偏差。
3 遠程通信設計
本文研究的直流充電樁能夠遠程無線通信。通過建立固定國際互連協議(internet protocol,IP)地址的服務器以及通過4G模塊或其他的上網裝置建立鏈接、轉發命令和數據,可以實現多地區多客戶端界面和現場操作終端界面的操作流程和數據的實時同步。這解決了多地技術人員的技術協助所需要的現場操作流程和數據的問題。遠程通信架構如圖4所示。
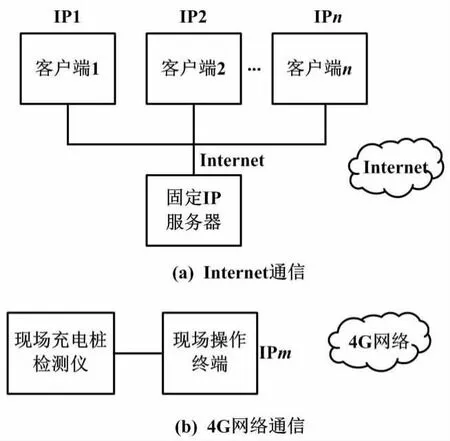
圖4 遠程通信架構示意圖
遠程通信架構的硬件結構主要包括現場操作終端以及客戶端等。所有界面都使用同樣的界面, 也就是主控操作界面只能有1項操作,其他均作為從同步操作界面。
現場操作終端在工作時必須在現場和現場充電樁校驗儀連接,并通過4G模塊和服務器進行通信。通信服務器必須安裝在有固定IP且能長期供電的位置。客戶端可以安裝在任何位置。當現場操作終端作為主控操作界面時,其他的客戶端均能同步到與現場操作終端一樣的界面。客戶端和現場操作終端使用統一的操作軟件和界面,避免了對界面大流量信息的遠程傳送。遠程同步只傳送控制命令和數據,大幅降低了對通信速率的要求、提高了遠程同步的實時性。操作命令和遠程數據的傳輸只需要10 kbit/s的通信速率即可。通過人工點擊界面按鈕的方式,可以把界面的操作權轉讓給任意1個客戶端,以便遠程技術人員直接操控充電樁校驗儀,從而實現實時診斷。
為驗證本文直流充電樁電能計量關鍵技術的性能,本文將方案1和方案2與本文方案進行對比分析。其中:方案1為傳統技術的三相交流充電樁計量情況;方案2為型號為FLUKE6003A的三相功率校準源。在具體研究中,本文設置5個測試點。不同的數據測試點分別為 (150 V,5 A)、(150 V,15 A)、(150 V,25 A)、(200 V,15 A)、(250 V,25 A)。在這些不同的測試點上,待測試的計量檢定系統能夠輸出電能脈沖信號。在不同的脈沖信號中,可配置參考功率,以核對電能誤差。傳統方案Tc或Td延時如圖5所示。
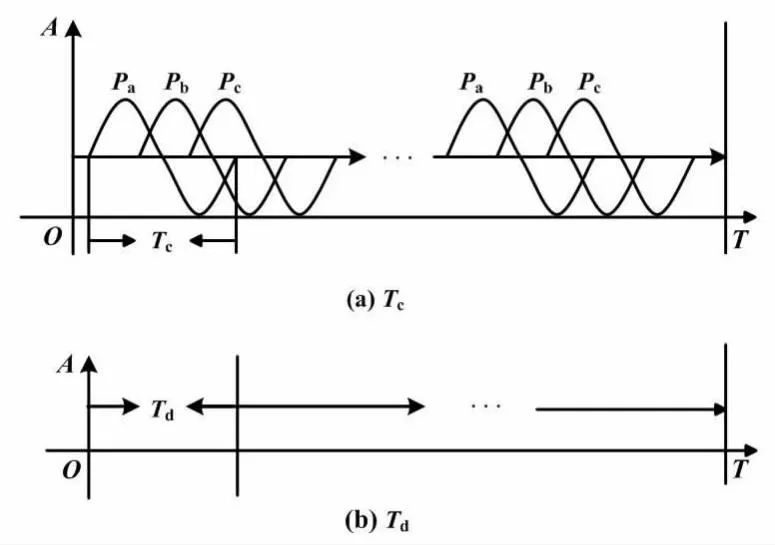
圖5 傳統方案Tc或Td延時示意圖
圖5中,橫坐標T表示時間周期情況,縱坐標A表示振幅。
本文方案Tc或Td延時如圖6所示。
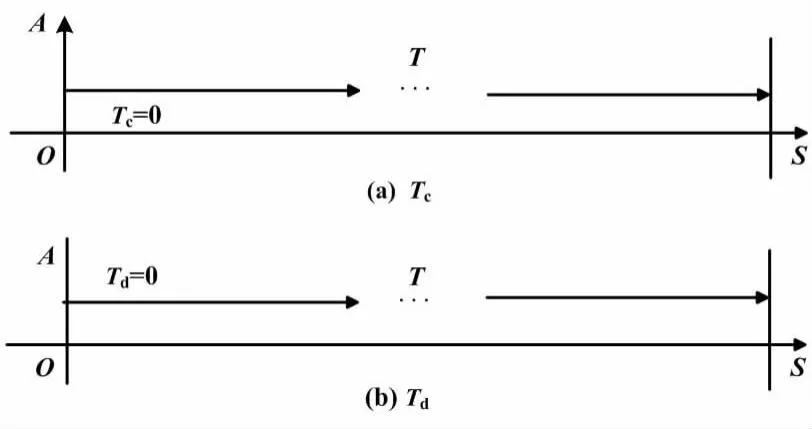
圖6 本文方案Tc或Td延時示意圖
由圖5、圖6可知,波形輸出為0,說明采用本文方案的電源紋波較小。下面對本文方案的測量精度進行對比。試驗抽樣數據如表1所示。
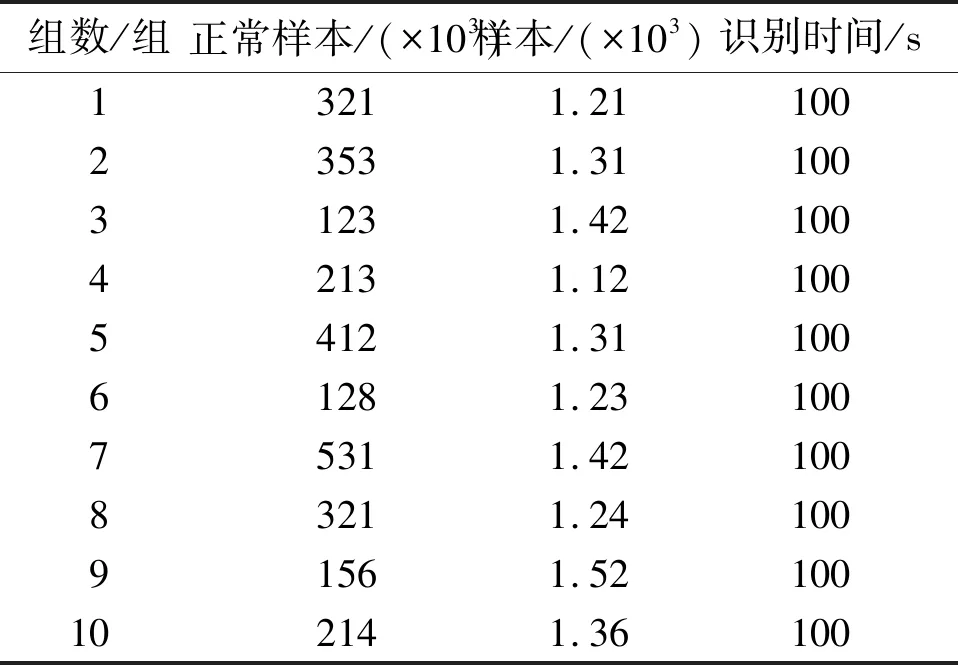
表1 試驗抽樣數據
試驗通過數據抽取,將計算機和移動終端的錄入數據作為對比信息分析。試驗結果顯示了3種計量校準方案對新能源汽車充電樁計量精度的變化曲線。利用仿真曲線可分析各系統性能。充電樁計量精度曲線如圖7所示。
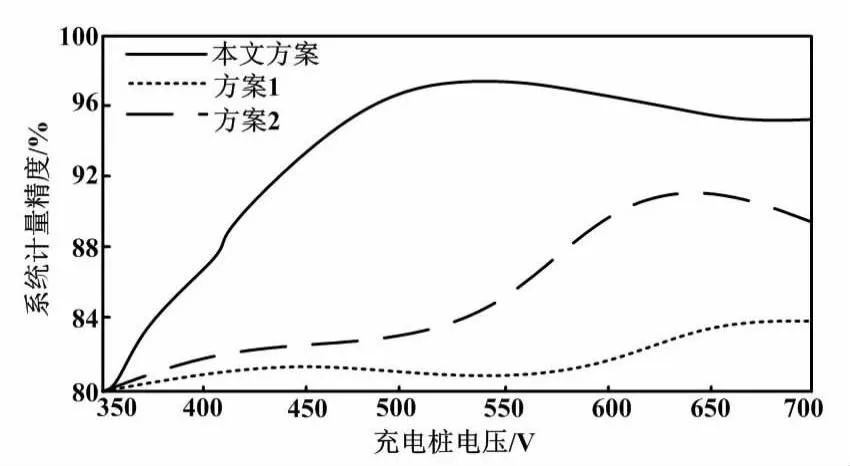
圖7 充電樁計量精度曲線
圖7中,充電樁計量精度受充電樁電壓影響。本文方案在充電樁電壓為530 V時計量精度達到最大。最大計量精度達到96%以上,之后逐漸降低。本文方案在電壓為700 V時,計量精度為95%。方案1在充電樁電壓為700 V時達到最大(89%),在560 V產生最小計量精度值(82%)。方案2在充電樁電壓為620 V時達到最大(88%),之后逐漸降低;在電壓為700 V時,計量精度為85%。在計算功率誤差時,可采用以下計算式:
(9)
式中:E為標準;F為測量值。
通過本文方法得出的交流充電樁測量數據如表2所示。
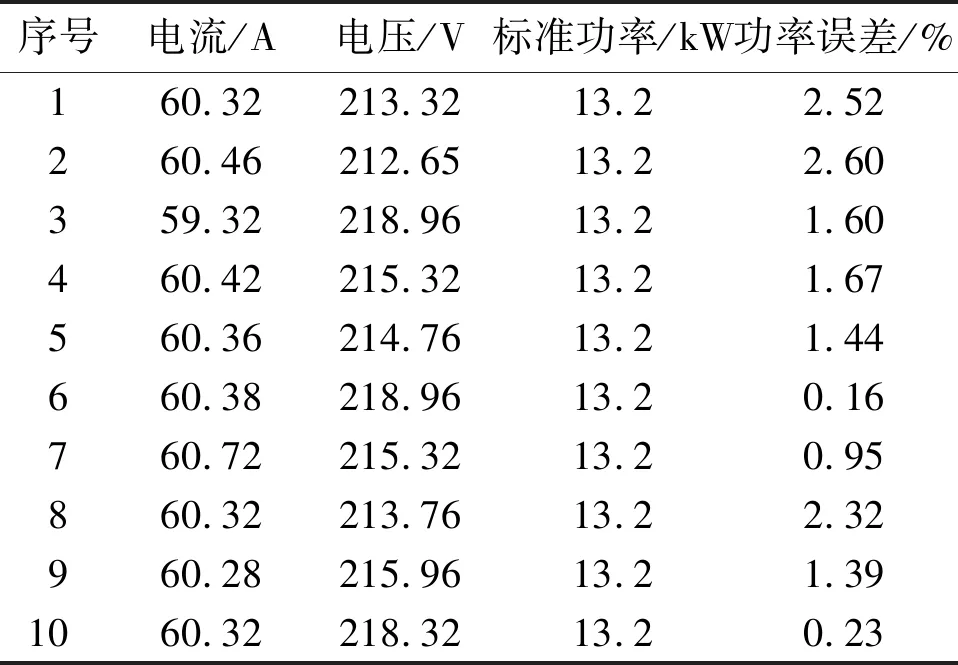
表2 交流充電樁測量數據表
由表1、表2可知,本文方案的計算誤差較小。交流充電樁誤差對比如圖8所示。
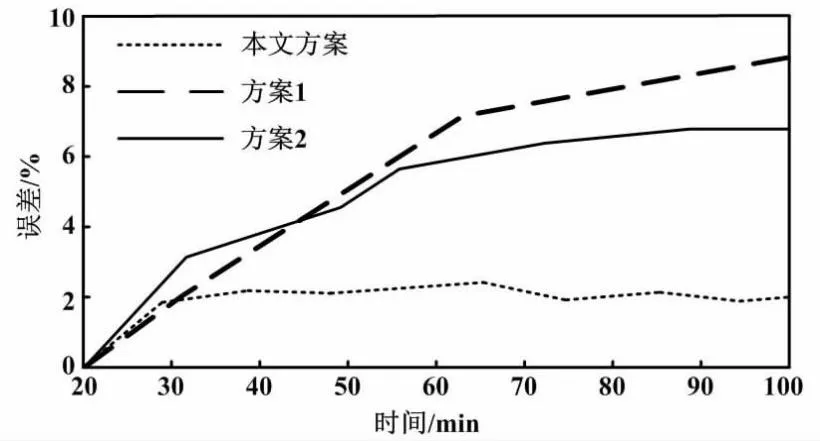
圖8 交流充電樁誤差對比示意圖
由圖8可知,隨著時間的延長,3種方案誤差都在逐步提高。本文方案誤差最低,大大節約了現場的檢測時間、提高了檢測效率。
4 結論
針對直流充電樁問題,本文基于硬件乘法器級聯原理的三相交流有功功率的瞬時值硬件電路,實現了交流有功功率在時域上的快速、精確獲取,且輸出為單一的直流信號。本文通過雙通道A/D同步測量,提高了電能計量能力。本文設計的新型直流電源硬件結構,通過增量補償控制輸出模塊,能夠有效地補償電網電壓和實際輸出電壓的差值,實現了電壓的穩定輸出和±15%的調節、提高了充電樁測試電源的增量補償能力。本文設計了1套遠程無線通信架構的硬件結構方案,提高了充電樁遠程通信能力和管理能力。
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
四川勞動保障(2021年10期)2021-12-02 01:41:42
今日農業(2021年14期)2021-10-14 08:35:28
四川勞動保障(2021年4期)2021-07-22 08:08:54
四川勞動保障(2021年5期)2021-07-19 06:09:54
四川勞動保障(2021年3期)2021-06-09 07:09:22
四川勞動保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
