面向微納遙感星座構建的阻力差分控制方法
2024-03-12 01:47:46張國云龔軻杰何雨帆陳軍蔡立鋒王超馬騰賀于珍
航天器工程 2024年1期
關鍵詞:大氣
張國云 龔軻杰 何雨帆 陳軍 蔡立鋒 王超 馬騰 賀于珍
(西安衛星測控中心,西安 710043)
微納衛星一般指質量在1~100kg的衛星,其具有體積小、質量小、研制周期短、功耗低、發射方式靈活、能以更低成本完成很多復雜空間任務等優勢,已在低軌通信、高分辨率遙感、導航增強、科學探索等領域得到廣泛應用[1-3]。近年來,國內外微納遙感衛星數量迅速增加,通過高頻重訪大幅提升對地觀測的時間分辨率,從而滿足高時效應急觀測需求[4]。
為滿足微納遙感星座對地觀測需求,實現對全球目標的高頻重訪,通常將所有微納遙感衛星均勻等相位分布在同一軌道面上。微納遙感衛星發射入軌后首先需要完成相位捕獲,原理是利用衛星的半長軸差實現相位漂移,在適當的時機減小星座衛星間的半長軸之差,以實現相位捕獲。因此,若不考慮衛星的高度維持需求,通過控制星座衛星的半長軸衰減,理論上可以完成星座組網。微納遙感星座成規模化部署,數量多,受限于整星功耗、質量、體積和成本要求,一些微納衛星一般無推進系統[5-7]。例如:美國行星(Planet)公司的鴿群星座[8]不裝備推進系統,使用阻力差分控制技術實現衛星的相位分布與構型維持[9-11]。美國軌道通信(OrbComm)星座35顆衛星利用阻力差分與推進相結合的控制方式完成站位保持。2013年的氣動立方星-4(AeroCube-4)任務中,通過控制太陽翼展開或收回完成星間距離的控制[12],最終將3顆衛星部署于預定軌道。目前,國內尚未有阻力差分控制技術應用于微納遙感星座構型建立的先例,僅有利用大氣阻力進行星座控制的理論研究。文獻[13]中研究了大氣阻力對衛星星座的控制方法,文獻[14]中研究了利用大氣阻力進行衛星星座站位保持的方法。盡管阻力差分控制技術已經在國外有成功應用,但仍存在一定缺點。鴿群星座衛星的太陽翼面板與星體固連,只能通過調節衛星姿態實現高、低阻力模式的切換,而且需要兼顧衛星遙感任務,指令生成過程較為復雜,調節頻次高[5]。氣動立方星-4任務中展開或收回太陽翼的操作,可能影響星上能源,并不適用于大多數衛星。
本文研究無推進微納遙感星座構型建立,提出在陰影區動態調整太陽翼角度以改變迎風面積的方式,從而改變衛星半長軸的衰減率,實現阻力差分控制,相位調整期間無需改變衛星飛行姿態,不會影響成像任務與星上能源。本文的阻力差分控制方法可為大規模、低成本微納遙感星座的建立提供參考。
1 阻力差分控制原理與方法
1.1 阻力差分控制原理
利用阻力差分實現衛星的相位控制由萊納德(Leonard)在1989年提出,其原理是在低軌道(一般低于500km)利用大氣阻力,通過增加或減小衛星的迎風面積改變衛星的運行速度,從而在衛星間形成需要的相位關系,實現星座構型的建立[15]。利用阻力差分實現衛星相位控制的優點包括減少推進系統的質量、無推進劑廢氣污染、產生的相對加速度很小等。因此,阻力差分控制技術已成為對控制時效性和精度要求較低的微納遙感衛星實現軌道控制任務和編隊飛行任務的優選。
雙翼太陽翼是許多低軌衛星標準配置,本文研究的微納遙感星座衛星[16]安裝1維驅動的雙翼太陽翼。太陽翼的轉動通常可以由星上程序設定,基于能源考慮,在陰影區動態調整太陽翼迎風面積,控制衛星進入高阻力或低阻力飛行模式。區別于鴿群星座,控制期間無需改變衛星飛行姿態,不影響成像任務。采用阻力差分控制技術在軌運行示意對比如圖1和圖2所示。圖1是鴿群衛星控制期間2種機動姿態[3-5],圖中箭頭方向指向衛星的飛行方向。其中:圖1(a)是低阻力模式,迎風面積最小;圖1(b)是高阻力模式,迎風面積最大;高阻力模式下產生的阻力是低阻力模式下產生阻力的8倍。圖2是本文研究的調整太陽翼的2種模式,圖中箭頭方向指向衛星的飛行方向。圖2(a)是低阻力模式,太陽翼轉角180°,迎風面積最小;圖2(b)是高阻力模式,太陽翼轉角90°,迎風面積最大。經仿真計算,高阻力模式下的平均大氣阻力為低阻力模式的1.3倍~1.4倍。
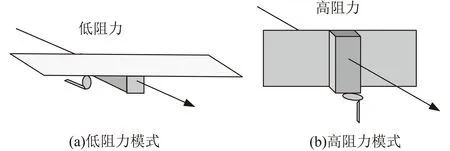
圖1 鴿群衛星的2種姿態模式
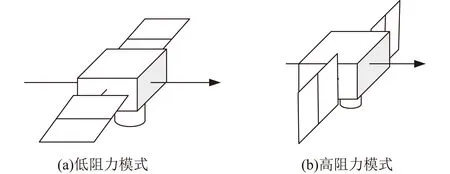
圖2 太陽翼的2種調整模式
對于同一軌道面相同高度(500km左右)的不同面質比的衛星,地球非球形攝動、日月引力攝動、太陽光壓攝動的綜合影響與大氣阻力差產生的影響相比,可以忽略[17],因此,本文只考慮大氣阻力攝動對軌道半長軸的影響。低軌衛星所受大氣阻力攝動加速度可以表示為[18]
式中:Cd為衛星的阻力系數;A為衛星的迎風面積;m為衛星質量;ρ為大氣密度,不考慮大氣旋轉;v為衛星運行速度。
假設微納星座衛星運行于500km高度的太陽同步軌道,所有衛星位于同一軌道面。入軌最大高度差不超過2km。微納星座衛星氣動外形一致,質量相同,相同阻力模式下運行整圈的太陽翼轉動程序完全相同,可以認為相同高度的相同阻力模式的衛星所受大氣阻力的影響基本一致。追蹤衛星與基準衛星所受大氣阻力之差即為阻力差分。切向只考慮大氣阻力的攝動作用,半長軸高斯攝動方程為[18]
式中:a,n,t分別為衛星軌道半長軸、平均軌道角速度和時間。
2種阻力模式下的半長軸衰減率之差為
式中:a0,n0,ad0分別為基準衛星的半長軸、平均軌道角速度和大氣阻力加速度;a1,n1,ad1分別為追蹤衛星的半長軸、平均軌道角速度和大氣阻力加速度。
2顆衛星半長軸相近時,2種阻力模式的衰減差可表示為
平均軌道角速度n表示為[18]
式中:μ為地球引力常數。
若用平均軌道角速度n表示相位θ漂移速率,式(5)對a求導可以將相位漂移速率線性化表示為
可見,2顆衛星相位漂移速率與半長軸之差成正比。
式(5)對時間求導,可得
2顆衛星相位漂移加速度可以線性化表示為
阻力差分相位控制原理可以用如下線性系統來表示[7]。

1.2 阻力差分控制方法
安裝推力器的遙感星座組網通過半長軸控制實現相位漂移與剎車,考慮的是衛星燃料消耗與組網時間的平衡,而阻力差分控制方法實現星座組網一般考慮的是盡可能發揮最大控制能力。阻力差分對相對半長軸的控制能力決定了相位控制能力Bk(uk),從而決定了完成組網的時間。阻力差分控制能力越強,即高阻力模式與低阻力模式下導致軌道高度衰減差值越大,最終完成組網的時間越短。
微納遙感星座組網的阻力差分控制可以分解為2個問題:①指定每顆衛星在最終星座部署中的位置;②規劃高、低阻力模式的調節時刻(控制窗口計算),生成高、低阻力指令,使每顆衛星進入指定的相位保持范圍。
1.2.1 星座構建的阻力差分控制方法流程
對于問題①,本文不考慮組網期間的相位交換,將高度最低的基準衛星標稱相位指定為0,根據其軌道高度從低到高,標稱相位從0°~-360°依次平均排列。
本文研究的微納遙感星座的特點是標稱相位順序與高度相關,不同衛星由于初始高度不同,完成相位捕獲的時間也不盡相同,高度較低的衛星可能率先完成相位捕獲,相對較高的衛星可能最后完成相位捕獲。率先完成相位捕獲的衛星,在相位追趕過程中(C階段),其高、低阻力模式下的阻力差分控制能力評估結果可以為未完成相位捕獲衛星提供參考。
假設所有衛星在高阻力模式或低阻力模式下的半長軸衰減率一致。根據上述策略,理想情況下微納遙感星座衛星相位控制過程示意如圖3所示。
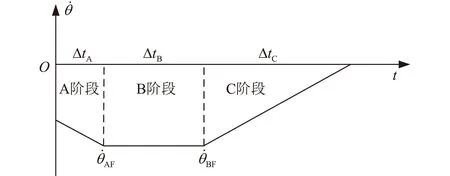
注:ΔtA,ΔtB,ΔtC分別為A階段、B階段、C階段的持續時長;和分別為A階段和B階段的末時刻漂移率。
一方面,由于大氣密度隨空間環境變化,阻力差分控制能力隨之變化;另一方面,隨著衛星高度降低,大氣密度增大,阻力差分控制能力也會相應增大。因此,阻力差分控制能力是隨時間動態變化的,微納遙感星座的相位部署不能完全按照理想情況實施高、低阻力模式的切換,否則相對高度較高的衛星相位極有可能落位不準,實際組網過程中需要不斷根據最新空間環境預報及衛星所處高度進行計算評估。組網起漂階段,先對阻力差分控制能力進行仿真估計,并開展在軌測試,利用定軌數據對阻力差分控制能力進行驗證,利用解析法計算各追蹤衛星低阻力模式與高阻力模式的切換時刻。
為了盡量避免相位超調,實際相位控制過程可以適當提前結束B階段。實際相位控制過程如圖4所示。與理想相位控制過程的區別主要體現在:C階段需要多次根據阻力差分控制能力最新評估結果進行高、低阻力模式的調整,采用階梯式降低相對高度的方法,能穩步實現相對高度控制與相位捕獲。
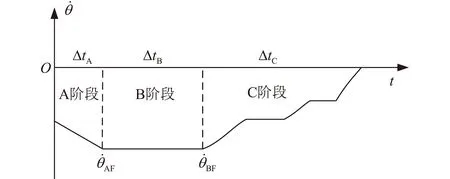
圖4 實際相位控制過程
阻力差分控制方法的實現包括5個步驟。①確定標稱相位:基準衛星相位為0,軌道高度從低到高,標稱相位從0°~-360°依次排列。②A階段控制:進行阻力差分控制能力在軌測試評估;計算ΔtA,將基準衛星保持高阻力模式,時長為ΔtA。③B階段控制:追蹤衛星與基準衛星均保持低阻力模式;根據阻力差分控制能力測試評估結果,計算ΔtB,實時更新剩余漂移時長;當B階段剩余時長小于3天時,結束B階段,開始C階段控制。④C階段控制:保持基準衛星低阻力、追蹤衛星高阻力模式;按照C階段控制的實施步驟動態調整追蹤衛星阻力模式。⑤組網結束:所有衛星到達指定標稱相位保持環中且半長軸基本一致時,組網結束。方法實現中涉及到的時間計算、C階段控制實施步驟、阻力差分控制能力評估將在下文論述。
1.2.2 控制窗口計算

B階段(相位自由漂移)可以描述為
C階段(相位追趕)可以描述為
1.2.3 C階段控制的實施步驟
1.2.4 阻力差分控制能力評估
本文提出對2顆衛星相對位置矢量夾角進行擬合的方法,對阻力差分控制能力進行評估。通過對相同時間段不同阻力模式下2顆衛星的相位進行二次多項式擬合,評估它們相位的差分控制能力,并用其相位漂移加速度計算半長軸衰減差值。具體描述如下。

θosc,i=angle(Rref,Ri)
(18)
(19)

2 實例驗證
設低軌微納遙感星座包括無推進能力的衛星20顆,星座構型要求將20顆衛星同軌道面等相位分布,為如期完成星座部署任務,本文采用阻力差分控制方法實現微納遙感星座的相位控制。選取微納遙感衛星中初始軌道高度最低的衛星5為基準衛星。以20顆衛星均勻分布為目標,追蹤衛星與衛星5相距指定相位(相鄰衛星相位間隔18°)為星座完成構建的標志。

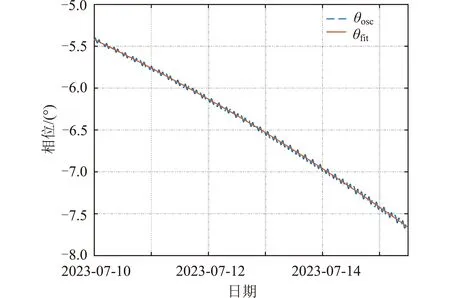
注:θosc為真實相位;θfit為擬合相位。


表1 星座初始狀態與調整日期
衛星目標相位由相對軌道高度決定,根據星座設計目標,星座完成部署后,所有衛星期望相位分布關系如圖6所示,20顆衛星基本在同一軌道面均勻分布,間隔18°,相位保持環為±2°。
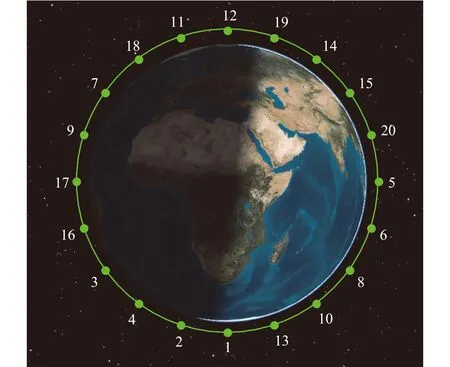
圖6 期望相位分布
圖7是2023年6月30日后20顆衛星的相位隨時間的演化情況(圖中標稱相位附近的紅色數字代表衛星編號,0,50,100,150表示調整天數)。由圖7可知:大約從初始時間150天后,20顆衛星已完成相位捕獲,目前均處于±2°的相位保持環內。
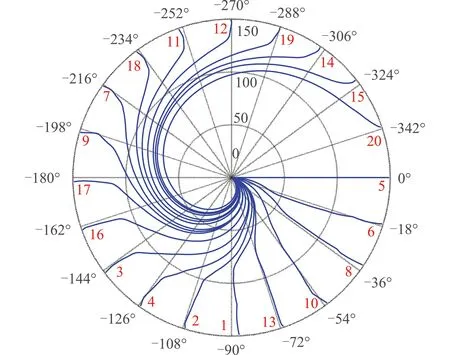
圖7 相位隨時間變化的極坐標圖
3 結束語
微納遙感星座利用阻力差分控制方法已于2023年成功完成星座構建,這是國內無動力微納星座構建的首次嘗試,對減少微納衛星研制生產、星座在軌維護成本及提高遙感衛星利用效率具有重要意義,可為同類大規模星座的部署提供參考。通過事先計算高、低阻力模式的控制窗口,可以及時更新阻力差分控制能力評估結果,以及高、低阻力模式的持續時長,盡量避免組網過程相位的超調,減少調節指令的上注頻次。后續研究可以將組網時長作為優化目標,最大程度利用阻力差分控制能力減少相位漂移時間,縮短整個星座組網周期,并進一步研究微納星座完成組網后的星座構型維持策略。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
科學(2022年5期)2022-12-29 09:48:56
家庭影院技術(2021年8期)2021-11-02 07:19:00
空間科學學報(2021年4期)2021-08-30 08:31:18
中國石油石化(2021年10期)2021-07-16 07:31:30
學生天地(2020年18期)2020-08-25 09:29:24
家庭影院技術(2019年1期)2019-01-21 02:25:02
中國篆刻(2017年3期)2017-05-17 06:20:46
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27