浮式風力機若干特征動力學問題綜述
2024-03-12 09:27:58程友良曹淑剛萬聲權
海洋工程 2024年1期
關鍵詞:模型
程友良,曹淑剛,3,萬聲權
(1.華北電力大學 動力工程系,河北 保定 071003;2.華北電力大學 河北省低碳高效發電技術重點實驗室,河北 保定 071003;3.龍源(北京)新能源工程設計研究院有限公司,北京 100034)
海上風電作為一種新興清潔能源,發展潛力巨大。根據支撐結構不同,海上風電可分為固定式和漂浮式2種。其中,漂浮式風電通過漂浮在水中的浮體支撐上部風電機組并利用系泊錨固定于海底,可應用于水深超過60 m 的深遠海海域[1]。1972 年,Heronemus[2]率先提出漂浮式海上風電的概念,但直到20 世紀末,該項技術才引起人們的關注。隨后,美國可再生能源實驗室(NREL)于2004 年開始漂浮式風電的研究工作并持續至今[3],先后開展OC3~OC6等[4-7]多個研究項目,在浮式風力機氣動—水動—系泊理論研究、數值仿真及模型試驗方面取得了豐碩的成果,開發了著名的FAST 軟件。直到2009 年,世界第一臺漂浮式風電樣機Hywind Demo 進行海試[8],漂浮式海上風電才從理論向實踐邁出了第一步,在此基礎上,英國于2017 年建成第一個漂浮式海上風電場[9],標志著浮式風電技術逐步實現商業化。相比而言,中國漂浮式風電起步較晚,2012 年,國家863 計劃項目首次對浮式風力機技術研究進行立項支持,到2018 年才真正開始漂浮式試驗樣機研發工作。但基于“雙碳”目標的提出,中國在漂浮式風電技術研發方面后勁十足,截至2023年7月,已完成3臺浮式樣機的研發及海上安裝,并仍有3個試驗示范項目正在推進過程中[10]。
雖然漂浮式海上風電前景廣闊,但其技術難度大,相關動力學問題仍處于探索研究階段[11-13]。浮式風力機動力學問題涉及風力機—浮體—系泊錨固—海床之間的多體耦合,并受伺服控制、隨機波浪、湍流風、潮流以及臺風、海嘯、地震等極端環境條件影響,而浮式風力機運行又對穩定性要求較高,《DNVGL-RP-0286》[14]建議浮式風力機運行時塔頂最大加速度不宜超過0.3g,最大傾角不宜超過10°,這給浮式風力機系統設計帶來較大挑戰。對浮式風力機的穩定性和抗風浪性能進行評估,準確預測其在復雜海洋環境中的耦合動力響應,是開展浮式風力機系統設計的前提,也是其動力學問題研究的重要內容。這里將對目前典型浮式風力機面臨的幾個特征動力學問題進行研究和分析,并對該類問題常用的研究方法及研究進展進行綜述。
1 漂浮式風力機類型及特性
漂浮式海上風力機形式靈活多樣,但大部分可以歸納為4種[15]形式(如圖1所示):立柱型、半潛型、駁船型和張力腿型。不同形式具有不同的適用水深和技術路線,但所有的形式都是由風電機組、浮體、系泊系統組成,且都是依靠浮體漂浮在水面上支撐上部機組,通過系泊系統進行定位,浮體和系泊系統長期經受風浪流荷載的作用,故所有類型的漂浮式風力機系統面臨的動力學問題及研究方法比較一致,但不同形式之間由于浮體結構或技術路線的不同仍然存在個性問題需要單獨討論[16-17]。

圖1 漂浮式海上風力機類型[18]Fig.1 Diverse categories of floating offshore wind power
1.1 立柱型浮式風力機
立柱型浮式風力機又稱Spar 型,其特點在于浮體采用細長柱體結構,長度可達60~100 m。柱體一般分為硬艙及軟艙兩部分,硬艙用來提供浮力,軟艙用來調節壓載以降低整個結構的重心,最終可使整個浮體的重心位于浮心之下,從而獲得足夠的回復力矩和較大的橫搖、縱搖慣性阻力,這種設計理念保證了整個系統的穩定性,使得立柱型浮式風力機成為所有類型中抗傾覆能力最強的一種。與此同時,立柱型浮式風力機采用較小的水線面設計且吃水較深,使其具有良好的抗垂蕩性能。雖然立柱型設計具有諸多優點,但也伴隨著產生一些特征動力學問題,如在海流的作用下細長柱體兩側會產生交替脫落的漩渦,這使得立柱結構受到周期性的脈動壓力,繼而引發渦激運動,當渦激升力與結構頻率接近時會造成鎖頻(lock-in)現象,引起共振。同時立柱型浮體不同自由度之間的運動響應會有耦合效應,相關的數值和試驗研究發現當立柱型浮體垂蕩周期大約為橫搖或縱搖周期2 倍時,會出現明顯的垂蕩—橫搖、垂蕩—縱搖耦合響應,繼而誘發較大的垂向運動,這種現象被稱為馬修不穩定效應(Mathieu instability)[19],也是一種參激振動響應。目前立柱型浮式風力機主要用于水深超過80 m的海域,世界上第一個商業化漂浮式風電場Hywind Scotland 即采用該種類型風力機。
1.2 半潛型浮式風力機
半潛型浮式風力機多為三立柱或四立柱型結構[20],立柱底部一般設計有垂蕩板,并設置壓載艙,通過調整各壓艙程度來實現合理的重力、浮力分布,半潛型浮式風力機系統一般重心會高于浮心。半潛型浮體一般水線面面積較大,在浮體產生傾斜時能夠提供較大的搖動回復力矩,使得橫搖及縱搖的穩定性較好。但同時也由于其浮體尺度的增大,使得在同等海況下所受的波浪載荷更大。半潛型浮式風力機的特性動力問題是對低頻波浪荷載較為敏感,二階低頻慢漂響應是該類型浮式風力機需要重點關注的問題[21]。半潛型浮式風力機適用水深范圍較廣,是最適合中國海域的基礎形式,中國目前研發浮式樣機都采用了半潛型的技術路線。
1.3 駁船型浮式風力機
駁船型浮式風力機與半潛型類似,部分學者會直接將其歸為半潛式,其同樣具有較大的水線面面積,但與半潛型相比其吃水更小,駁船型的動力響應特性也與半潛型類似,大水線面會導致受到的波浪荷載更大,對低頻慢漂響應更為敏感。該類型的代表是法國的Damping Pool[22]浮式風力機概念,其設計理念來源于船舶減搖水艙和鉆井船月池的設計,通過中間阻尼池和內部減搖水艙等手段增加阻尼,減少整體的運動響應,其縱、橫搖固有周期一般在14 s左右,垂向運動固有頻率一般在一階波浪頻率范圍內,故波頻響應較為敏感,設計時需要對平臺運動進行頻率優化。
1.4 張力腿型浮式風力機
張力腿型浮式風力機的設計理念與其他形式差異較大,最大不同在于浮體浮力要遠大于重力,通過施加較大預張力的張緊式系泊來實現定位[23]。張力腿型的系泊系統使得浮體平面外運動響應(橫搖、縱搖和垂蕩)較小,但由于其對水平面內約束相對較弱,受到波浪和水流作用力后浮體會產生面內運動(橫蕩、縱蕩和艏搖)。張力腿型浮式風力機垂向運動的固有頻率要高于一階波浪力頻率范圍,其特性動力學問題是對高頻波浪荷載特別敏感[24-26],應重點關注波浪二階和頻及高階非線性波導致的共振問題。張力腿型浮式風力機系泊系統用海面積小,平臺面外運動小,利于上部風電機組的穩定運行和發電效率的提升,但張力腿技術門檻較高,一旦失效將造成風力機傾覆,目前該類型浮式風力機仍不成熟。
浮式風力機在不同自由度上運動響應的固有周期能夠很大程度上反映設計理念和設計合理性,一般是動力學問題研究的首要關注點。表1給出了不同類型浮式風力機在不同自由度運動時的周期范圍及其對應的特征動力學問題,可作為設計及研究參考。
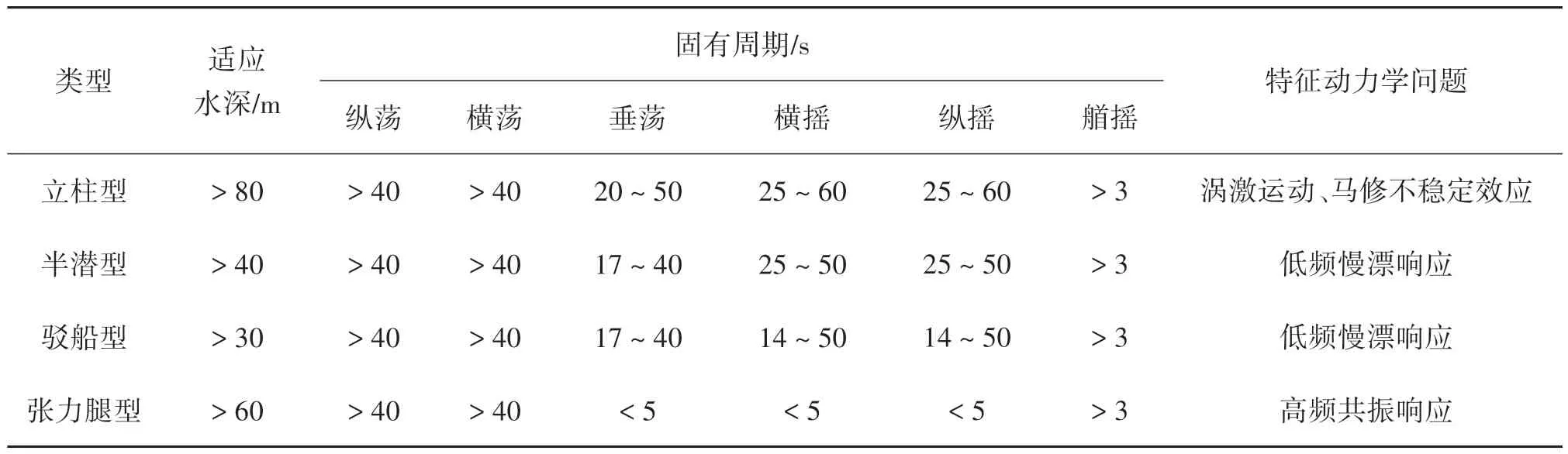
表1 典型浮式風力機平臺固有周期范圍[27]Tab.1 The representative natural periods of typical FOWT floating support structures
2 浮式風力機系統特征動力學問題
2.1 系統動力學方程
如圖2所示,浮式風力機整個系統由浮式基礎、上部風機、錨泊系統組成,在海水中受風浪流環境荷載和風電機組荷載作用,動力學分析涉及氣動—水動—結構—伺服控制相互耦合。為簡化分析,假設整個系統為剛體運動,此時其動力學方程可表示為:
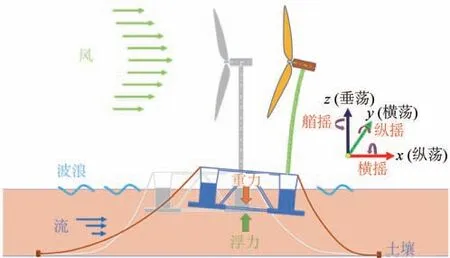
圖2 浮式風力機多體耦合動力學示意Fig.2 Multi-body coupling dynamics of floating wind turbines
式中:M為浮式風力機系統質量矩陣;μ為附加質量矩陣;η為浮式風力機系統剛體運動位移矩陣;C為阻尼矩陣;K1為靜水剛度矩陣;K2為系泊剛度矩陣;Fe為外荷載矩陣;ω為合外力作用頻率,rad/s。其中,外荷載Fe可表示為:
式中:Fwind為風荷載;Fwave為波浪荷載;Fcurrent為流荷載;Fturbine為風電機組荷載。
在浮式風力機水動力研究中一般采用頻響函數來反映浮體在海洋環境中所受外界激勵荷載和動態響應之間的關系,頻響函數可表示為:
其中,H即為頻響函數,又稱運動響應傳遞函數。
以上將漂浮式風力機系統簡化為剛體運動,該種方法對于研究浮體運動響應、系泊錨鏈受力等具有重要意義,也是目前漂浮式風力機半耦合設計中常用的方法。但實際上浮式風力機是一個典型的剛柔多體耦合動力學系統,在該系統中,浮體的剛體運動、塔架和葉片結構的柔性變形、系泊錨鏈的張緊或松弛等同時出現,且相互耦合、相互作用,整個系統具有較強的非線性。如何建立剛柔多體耦合的動力學模型以及對模型進行求解是浮式風力機動力學問題研究的難點。目前,關于浮式風力機剛柔多體耦合動力學的研究已有一些研究成果,Likins[28]提出了混合坐標動力學模型,Chen等[29]基于卡爾丹角坐標系提出了旋轉懸臂梁模型和多體運動傳遞模型,這些模型可較好地描述浮式風力機剛柔耦合多體動力學行為;而對于浮式風力機剛柔耦合動力學模型的求解目前也已開發出了相關的數值計算軟件,如FAST、OrcaFlex、HAWC2 等。但這些模型及求解方法的準確性和計算效率仍存在較大的優化空間。
2.2 浮式風力機氣動荷載
浮式風力機氣動荷載是影響動力響應的重要因素,然而來流本身的復雜性以及葉片旋轉、變槳、彈性變形、浮體運動等原因造成的繞流的復雜性導致氣動荷載的準確評估非常困難。目前風力機氣動荷載的計算方法主要有葉素—動量理論(BEM)、渦流理論(FVM)和計算流體力學(CFD)三種。其中,葉素—動量理論是最常用的方法[30],其基本思路是將葉素理論和動量理論相結合,葉片沿長度方向分成若干葉素,假設各葉素的荷載互不干擾,分別求解每個葉素的局部誘導速度,然后沿葉展方向將氣動力進行積分。圖3為葉素單元力學分析示意圖,圖中:CL、CD分別為升力系數和阻力系數;Ve-ip、Ve-op分別為葉片葉素局部運動的速度分量;a、a'分別為軸向誘導因子和切向誘導因子;φ為入流角;FL為升力;FD為阻力;α為攻角;β為槳距角;U∞為入射風速。
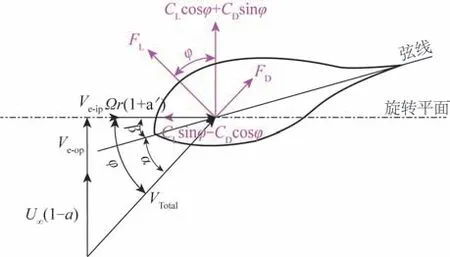
圖3 葉素單元受力分析示意Fig.3 Mechanical analysis of the blade element
當葉片自身運動較小時,此時可以忽略葉片本身的運動,得到入流角、軸向誘導因子和切向誘導因子之間滿足如下關系:
式中:Ω為葉輪轉速,rad/s;r為葉素單元距輪轂中心的距離,m。當r=R時,
式中:R為葉輪半徑,m;λR為葉尖速比。
當葉片自身運動較大時,在計算入流角時需要計入葉素局部運動速度,此時:
根據葉素—動量理論,可以得出距離葉輪中心r處寬度為dr的葉素單元上產生的推力和扭矩分別為:
式中:c為葉片剖面弦長,m;VTotal為入射風速與考慮葉輪旋轉及葉素單元局部運動速度的合成風速,m/s。
葉素—動量理論用于計算風力機氣動荷載簡單有效,但同時也具有一些局限性。一是該理論是基于靜平衡狀態得出的,當軸向誘導因子a>0.4時,尾跡進入湍流狀態,此時直接應用葉素—動量理論將會失效;二是當葉片發生平面外大變形時計算誤差將增大。因此,近年來一些學者針對葉素—動量理論提出了較多的修正模型:Mikkelsen[31]基于大量試驗測試,提出了旋翼推力系數修正方法;Buhl[32]引入了葉尖損失的修正系數;劉利琴等[33]對動態失速、風剪切以及塔影效應等進行了修正。此外,浮式風力機平臺運動響應較大,其氣動荷載計算的挑戰還在于平臺運動引起的相對風速的復雜變化,這種影響又稱為動態入流效應,可能會導致負阻尼現象的出現,故當采用葉素—動量理論時還應增加一個動態入流模型的修正。
當然,除了最常用的葉素—動量理論外,也有一些學者采用渦流理論或CFD 方法來研究風電機組的氣動荷載。渦流理論法是采用在葉片展向微段上布置馬蹄渦代替葉片的計算方法,每個馬蹄渦包括附著渦和尾渦,故該方法的關鍵是附著渦模型和尾跡渦模型的構建和處理。尾跡模型又分為固定尾跡模型、預定尾跡模型和自由尾跡模型[34],其中自由尾跡模型是通過求解整場誘導速度來確定尾渦模型,能夠計算尾跡的畸變和卷起,是目前應用最廣泛的渦流計算方法。Shen等[35]采用自由尾跡模型計算了浮式風力機在預設運動下的非定常氣動荷載,Rodriguez和Jaworski[36]將自由渦尾跡與氣動彈性算法相結合,模擬了浮式風力機與尾流的相互作用。此外,Greco 和Testa[37]建立葉片和尾流的三維數值渦模型并提出模型求解的面元法。CFD 方法是通過數值求解流體控制方程來實現流場的準確模擬,其中風力機建模、網格生成以及湍流描述是CFD 方法的核心。目前網格生成的方法主要有多重坐標系法、滑移網格法和嵌套網格法,而湍流模擬的方法主要有直接數值模擬(DNS)、大渦模擬(LES)和雷諾平均(RANS)3種,其中RANS是應用最廣泛的方法,該方法中常用的湍流模型包括S-A、k-ε、SST k-ω等。CFD方法的優點在于計算精度高,但對計算資源要求較高且耗時較長,通常在學術研究中應用較多,如:Liu 等[38]基于開源CFD 工具箱OpenFOAM 研究了OC4 半潛浮式風力機氣動荷載對平臺運動、系泊響應的影響以及平臺運動對風力機氣動性能的影響;Li 等[39]對CFD方法計算氣動荷載的計算域尺寸、網格劃分策略、時間步長等進行了詳細論述;Fu等[40]采用CFD方法對浮式風力機在俯仰運動下的氣動荷載進行了分析。
2.3 浮式風力機水動荷載
2.3.1 水動力計算方法
浮式風力機水動力計算方法主要有勢流理論法、Morison方程法以及兩種方法的結合。其中勢流理論法主要用于d/L≥0.2(d為結構特征尺寸,L為波長)的大尺度浮體結構,如浮式風力機浮體結構;而Morison 方程是一種半理論半經驗公式,主要用于d/L≤0.2 的小尺度構件,如浮式風力機基礎的橫撐、斜撐、系泊鏈等。勢流理論是假設流體為理想流體且無旋,流場的速度勢?滿足拉普拉斯方程,即:
該方程為勢流理論基本方程,當波浪傳播過程中遇到浮體,波浪傳播方向會改變,產生波浪繞射,而浮體在六自由度運動時也會對周圍的流場產生影響,進而產生輻射速度勢。當考慮規則波時,浮體所受的波浪力可以分為波浪激勵力、繞射力、輻射力,其對應的速度勢可以寫為:
式中:?I為一階單位波幅波浪下的激勵速度勢;?d為繞射勢;?rj為六自由度的輻射勢。
要想求解上述方程需要補充物面處、海底處、自由表面處、無窮遠等處邊界條件,具體求解原理可參考波浪力學的相關文獻[41-42]。相比勢流理論,Morison方程比較簡單,其主要原理是考慮波浪對細長物體產生的拖曳阻力與慣性力。作用在圓柱體任意高度z處長度為dz的柱體上的波浪力可表示為:
式中:ux為來流速度,m/s;ρ為流體密度,kg/m3;D為柱體直徑,m;CD為阻力系數,反映了流體黏滯效應,一般由試驗測得;CM為慣性力系數。
需要注意的是Morison 方程在理論上是有缺陷的,其中流體拖曳阻力是按照黏性流體定常均勻流繞過柱體時對柱體的作用力分析得到的,而慣性力是按照理想流體有勢非定常流理論分析得到的,兩者沒有共同的理論基礎。雖然存在上述缺陷,但是目前還沒有一個更好的方程能夠取代它。多年的工程應用經驗表明Morison方程尚能給出比較準確的結果,因此,其至今仍然是小尺度結構水動力計算的主要方法。
流體的黏性效應會對浮式風力機水動力計算的準確性產生影響。基于勢流理論的水動力計算方法不能考慮流體的黏性,這往往會低估浮式風力機水動力荷載,若考慮黏性效應,一般需基于切片理論或基于模型試驗得出附加阻尼系數對計算參數進行修正,或采用Morision公式修正后進行計算[43],這些方法往往涉及諸多假設或試驗,分析結果有時會與實際有較大差異。關于黏性效應的影響:Clement等[44]研究表明黏性阻尼對浮式風力機垂蕩、縱搖、橫搖運動影響顯著;Hallak等[45]采用附加阻尼矩陣法來考慮黏性阻尼力,但在計算精度方面并未做更深入的探索;程友良等[46]、曹淑剛等[47]證明了黏性效應對浮式風力機共振周期附近的響應值影響明顯,在水動力計算時不可忽略。
2.3.2 非線性波浪荷載
如前所述,浮式風力機浮體波浪荷載計算通常采用勢流理論,流場中的速度勢函數滿足拉普拉斯方程,函數求解滿足自由表面邊界條件、海底邊界條件、物面條件、初始條件和輻射條件,根據物面邊界條件和自由表面條件階數的不同,可以分為線性理論和非線性理論。線性理論是指自由表面邊界條件和物面條件的攝動階次均為一階,而非線性理論則為二階甚至更高階的階次[48]。目前,對于規則波來說,線性波理論主要為Airy波理論,非線性波理論主要有Stokes波理論、橢圓余弦波理論、孤立波理論、流函數理論。線性波浪理論的速度和加速度解析解中只含有低階項,而對于浮式風力機,長期服役于惡劣的外海環境,按照線性理論已不能滿足對其水動力性能的預測精度。實踐證明,結合非線性二階波浪作用后的計算模型能夠較好地改進波浪和結構之間的相互作用,使預測更接近實際,故目前工程計算中一般至少需要考慮到二階波浪力[49-50]。二階波浪力一般通過數值或試驗方法來得到,但由于其理論體系尚不完善,諸多學者還在探討更準確有效的計算方法。二階波浪力由定常項、合頻項與差頻項3部分合成,水平方向的定常力又被稱為平均漂移力[51],其大小正比于波高的平方,主要由浮體對波浪繞射作用產生。二階波浪力的數值求解方法有遠場積分法、近場積分法和中場積分法[52]。遠場積分法是根據流域中能量和動量守恒方程得到浮體在規則波中的平均二階波浪力,該方法在遠離浮體的控制面上進行積分,計算簡便,且比近場積分法更加準確,但該方法只能給出二階力中的定常部分。近場積分法是通過瞬時物體表面水動壓力積分求得二階力在各個坐標軸上的分量,該方法能夠計算定常、低頻和高頻二階力,但計算相對復雜且耗時。中場積分法首先在浮體附近建立一個控制面,然后利用斯托克斯公式和高斯公式,將近場積分法中對物面的積分轉化成在控制面及平均水線面上的積分,這一方法避免了浮體表面網格劃分對速度勢求解精度的影響,并能夠計算定常、低頻、高頻二階力,具有較好的數值穩定性。歐紹武和付世曉[53]對遠場法、近場法和中場法進行了總結,基于HydroStar 軟件分析了網格密度、浮體形狀、水深對二階波浪力的影響,得出遠場法具有較好的數值穩定性,而近場法受網格密度、浮體形狀等因素影響較大。二階波浪力中的低頻成分通常是懸鏈線式系泊浮體關注的重點,低頻波浪力的計算可以采用近場積分法或中場積分法來求解完整的二階傳遞函數矩陣,又稱全QTF法,該方法需要求解二階速度勢,求解過程極其耗時,為提高效率,工程中常使用Newman 提出的利用定常二階力近似低頻二階力的方法,該方法稱為Newman 近似法,Newman 近似在頻率較低時與全QTF 法計算結果會比較接近,但在頻率較高時可能會存在一定的誤差。
浮式風力機一般有懸鏈線式系泊和張緊式系泊,不同系泊方式對波浪力不同成分的敏感性也不同。對于半潛型和駁船型浮式風力機一般采用懸鏈線式系泊,此時二階波浪荷載中的差頻成分對浮體運動及系泊力的影響較大;而對于張力腿型浮式風力機采用的是張緊式系泊,此時二階和頻甚至更高階波浪荷載對其系泊及浮體運動的影響更為敏感;對于立柱型浮式風力機,周濤等[54]利用SESAM 軟件計算二階波浪力并利用FAST 軟件對該浮式風力機系統進行時域耦合仿真,結果表明二階慢漂力對立柱型浮式風力機垂蕩運動有較大影響,且易激發較大的縱搖運動,并產生較大的錨纜張力。
在海洋工程中還有一種強非線性波叫畸形波,畸形波對海上結構物危害極大,研究浮式風力機在畸形波作用下的動力響應具有重要意義。關于畸形波的定義,Klinting[55]認為需滿足以下3個條件:
1)畸形波波高與有效波高的比值不小于2,即Hmax/Hs≥2;
2)畸形波的波峰高與波高比值不小于0.65,即ηc/Hmax≥0.65;
3)畸形波與前后相鄰的波峰高的比值不小于2,即Hmax/H1≥2、Hmax/H2≥2。
以上3個條件同時滿足較為苛刻,實際工程中為保證海洋結構物的安全,通常認為滿足條件1)即為畸形波。起初畸形波的研究主要集中在畸形波生成的數值模擬,近些年逐步過渡到畸形波對海洋結構物的作用[56]。Zhong 等[57]利用新波理論和隨機海浪理論建立了畸形波入射波模型,研究發現畸形波對半潛平臺運動響應和系泊纜動張力影響較大;李業成等[58]將含畸形波的隨機波浪試驗與一般隨機波浪試驗進行對比研究,結果發現半潛平臺縱蕩、縱搖的極大值以及波浪爬升與氣隙的極大值受畸形波的影響顯著增大,且畸形波增強了波浪爬升與氣隙響應的非線性;常爽等[59]求解畸形波作用下張力腿平臺動力響應,發現二階畸形波會引起浮式風力機平臺縱蕩、垂蕩和縱搖的大幅值運動。浮式風力機在畸形波作用下的動力響應是其動力學研究的重要內容,特別是對于臺風多發的惡劣海域。
2.3.3 流荷載及渦激響應
浮式風力機結構中存在許多圓柱體結構,海流流過圓柱體時會產生一定周期交替變化的漩渦,漩渦會在圓柱體上產生交替變化的升力和阻力,當結構的某階自振頻率接近漩渦泄放頻率時,結構就會產生共振,該現象稱為渦激振動,浮式風力機的系泊纜或張力腿等柔線性結構中會出現渦激振動現象。而對于采用柱體建造的浮式風力機基礎,在海流作用下由于柱體自身特征及流體黏性,柱體表面流體發生分離時會產生不連續的漩渦脫落,導致柱體表面壓力發生不對稱變化,激發柱體整體產生激勵力,進而引起浮體發生剛體運動,這種響應稱為渦激運動(vortex induced motion, 簡稱VIM)[60]。渦激運動在帶立柱或浮箱的浮式風力機基礎中都會產生,是浮式風力機重要的流固耦合動力學問題[61],特別是對于深吃水半潛浮式風力機以及Spar型浮式風力機。但截至目前對于浮式風力機VIM 的研究還比較少,大部分研究仍依靠數值仿真或試驗方法進行:Liu 等[62]采用Fluent軟件對OC4 半潛型浮式風力機進行渦激運動研究,分析了海流不同入射角度以及上下游立柱對渦激運動的影響,發現當鎖頻現象發生時流致渦激力會大幅度增加浮體運動響應;Duan等[63]采用1∶50 的縮尺比對Spar 型浮式風機進行水池試驗研究,發現風浪對平臺的橫蕩渦激運動有抑制作用。通過研究可知:流速、流向、流剖面、結構幾何形狀、附屬構件都會對渦激運動響應產生影響,截至目前還沒有成熟的渦激運動預報分析工具,相比而言模型試驗被認為是較為可靠的方法。渦激運動研究的最終目的是找到抑制渦激振動的措施或對結構、系泊進行加強,保證浮式風力機的安全。
2.4 浮式風力機控制動力學
浮式風力機控制動力學技術主要包括基于伺服控制的機組運行控制和基于結構的減振控制。伺服控制包括變轉速控制、變槳控制、偏航控制3 個方面。圖4 所示為風力機控制原理圖,根據風速及機組運行狀態分為4個區域:當風速小于切入風速時(區域Ⅰ)風力機處于停機狀態,此時槳距角一般為0°;當風速達到切入風速時(區域Ⅱ),風力機開始運轉,并且隨著風速增大輸出功率逐漸增大,轉速控制使風電機組始終處于最佳風能捕獲狀態,實現發電功率最大化,此時槳距角一般為1°~2°;隨著風速繼續增大到區域Ⅲ范圍內時,風速處于額定風速和切出風速之間, 此時控制目標是通過主動變槳調節葉片槳距角, 使機組保持穩定的輸出功率;當風速繼續增大,超過切出風速時,機組進入停機控制區(區域Ⅳ),此時葉片調節至90°順槳狀態,機組停止運行。偏航控制比較簡單,是風電機組根據風向對風進行調節的一種控制。上述控制調節在風電機組運行時實時發生并影響機組氣動荷載,通過優化控制策略可進行氣動降載。浮式風力機控制系統的挑戰在于浮體存在大幅度運動響應,采用傳統控制策略容易出現負阻尼效應[64],這種效應導致風力機輸出功率波動或降低,甚至會引起其他共振問題,故一般浮式風力機需要開發專門的控制策略或對固定式機組控制策略優化后應用。Wakui等[65]針對Spar型浮式風力機開發了一種多反饋伺服控制系統,實現了通過變槳和變轉速控制降低功率波動和俯仰運動的目的;Suemoto 等[66]證明了獨立變槳能顯著降低浮式風力機葉片荷載。除此之外,基于深度學習、多目標決策及魯棒控制的技術也逐步被應用到浮式風力機控制策略中[67-68],這對于控制系統的改進和發電量的提升具有重要意義。更多關于半潛、Spar、TLP、駁船型浮式風力機控制系統的研究進展可參閱文獻[69]。
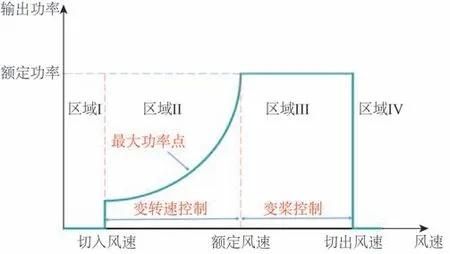
圖4 風力機控制原理Fig.4 The control system for a wind turbine in a schematic diagram
基于結構的控制是高聳結構物常用的減振控制技術,對于浮式風力機主要通過增加額外阻尼器,調節塔筒結構振動和浮體運動響應來實現降低浮式風力機荷載的目的。其中基于調諧質量阻尼器(TMD)的控制技術在浮式風力機結構控制中應用最為廣泛,其最早是由Lackner 和Rotea[70]研究并應用于駁船型浮式風力機。隨后,Park 等[71]、金鑫等[72]諸多學者對TMD 控制技術進行了研究和仿真模擬,并在TMD 基礎上發展了多種結構減振控制阻尼器。如Fitzgerald 等[73]提出了主動調諧質量阻尼器(ATMD),Hu 和He[74]提出了混合質量阻尼器(HMD)并進行了試驗研究,Tian 等[75]提出半主動調諧質量阻尼器(SATMD)等。雖然以TMD為代表的結構控制阻尼裝置能夠有效降低結構振動和浮體運動,但也存在諸多挑戰,如:TMD 附加質量大、行程遠,可能會對浮式風力機的重心高度和內部空間布置產生影響;再者TMD 是一種線性系統,控制頻帶窄,往往只能在設計頻率附近產生較好的抑振效果。故目前基于TMD技術的優化仍是浮式風力機結構控制的研究熱點。除此之外,其他類型的阻尼控制技術也在浮式風力機中廣泛應用,如著名的WindFloat 主動調載控制技術[76]、Nazokkar 和Dezvareh[77]研發的半主動液柱氣體阻尼器(SALCGD)控制技術等,這些控制技術雖然原理不同、形式多樣,但目的都是為了提高浮式風力機整體穩定性,降低結構振動和機組荷載。
2.5 浮式風力機結構動力學問題
浮式風力機涉及到的結構動力學問題主要包括葉片結構動力學、塔架結構動力學、系泊結構動力學以及他們之間的相互耦合[78]。浮式風力機葉片是捕獲風能的主要結構,是一個展向長、弦向短的細長彈性體,除受氣動荷載外,在運行過程中還面臨偏航、變槳、變速等機械操作,受力比較復雜,是一個極易發生振動的氣動彈性部件。葉片振動形式有揮舞、擺振和扭振3種,3種振動與氣動力耦合形成風力機的氣動彈性問題。葉片結構動力學模型包括等效梁模型(EBM)、有限元模型(FEM)和多體動力學模型(MBD)3 大類,3 類模型可不同程度地反映揮舞、擺振、扭振之間復雜的彈性和慣性耦合關系,將葉片氣動荷載計算模型與結構模型進行組合可得到不同的氣動—彈性耦合模型,如BEM-FEM 模型、BEM-EBM 模型、CFD-MBD 模型等,考慮到計算精度和效率,結合葉素動量理論和等效梁模型的氣動—彈性模型(BEM-EBM)是應用最廣泛的模型。塔架結構動力學問題主要指塔架固有特征及其動力響應分析,同時還應關注風致渦激振動引起的塔架螺栓松動及結構疲勞問題。系泊動力學問題是傳統海洋工程問題,目前應用比較多的分析理論有懸鏈線理論、集中質量法以及細長桿理論。其中,懸鏈線理論主要用于懸鏈式系泊,該理論僅考慮浮體定常運動和慢漂運動,忽略浮體波頻響應以及系泊線本身受浪流的作用,由懸鏈線方程或受力—位移曲線來分析系泊系統的動力學行為。該方法雖然存在誤差,但計算簡單快捷,在項目初期評估時被廣泛采用,但由于忽略了錨鏈的慣性力和拖曳力,在極端海況以及系泊錨鏈固有頻率與波浪譜峰頻率接近時往往會低估系泊力。集中質量法是將系泊線簡化為無質量的彈簧與集中質量點的方法,其求解通常采用有限差分法,該方法數學模型簡單,易收斂,在一些商業軟件如OrcaFlex 中被廣泛應用,但該理論同樣不適用于張緊式系泊。細長桿理論是由Garrett[79]提出,是一種基于有限元方法的理論模型,并在后續發展形成了彈性細長桿理論[80],該理論計算精度高,且能夠對人工合成材料、張緊式系泊等多種情況進行模擬,是目前系泊系統動力分析中最具優勢的分析理論,對于深水系泊需要采用該理論。
浮式風力機結構動力學最大難題是氣動—水動—結構—控制多體耦合模型(圖5)的建立及其動力響應求解,浮體的剛體運動與塔架、葉片的柔性變形同時出現且相互作用,具有較強非線性特征,屬于典型的剛柔耦合多體動力學問題。Roach 等[81]、Zhang 等[82]、Ramzanpoor 等[83]分別采用數值軟件FAST、AQWA、SIMA等對浮式風力機進行多體耦合建模和動力學分析;Yang 等[84]、Al-Solihat 和Nahon[85]通過試驗方法對浮式風力機多體耦合動力響應進行了研究。雖然諸多學者對浮式風力機氣動—水動—結構耦合問題進行了大量研究,但大部分模型在氣動荷載計算精度、非線性波浪荷載處理、多體運動耦合計算方面都存在一些問題,導致目前浮式風力機一體化設計仍存在困難,截至目前,提高浮式風力機在復雜風浪環境下耦合動力響應的預測精度和計算效率仍是一項極其重要的工作。
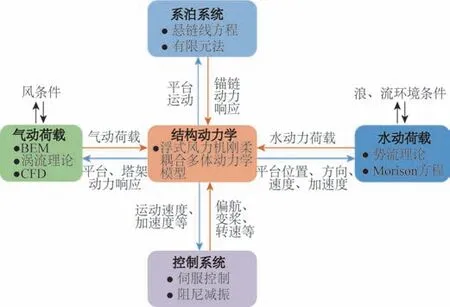
圖5 浮式風力機耦合動力學模型組成Fig.5 The coupling dynamic model of floating wind turbines
3 浮式風力機動力響應研究方法
3.1 模型試驗技術
模型試驗是浮式風力機動力響應研究最常用也最有效的方法。一般對新型浮式風力機都要進行模型試驗測試。如圖6 所示,模型試驗通常在大型風浪水池中進行,其主要目的包括:1)得到并驗證系統的阻尼等參數;2)驗證數值計算的正確性;3)得到極端工況響應,發現一些特殊試驗現象,保證系統安全。模型試驗項目一般包括風力機氣動載荷試驗,靜水衰減試驗,白噪聲試驗以及風、浪、流單獨或聯合作用試驗[86]。試驗成果包括浮式風力機平臺運動固有周期與阻尼、運動RAO、不同工況下的運動響應、機艙和平臺加速度、錨鏈張力、波浪爬升高度等數據。
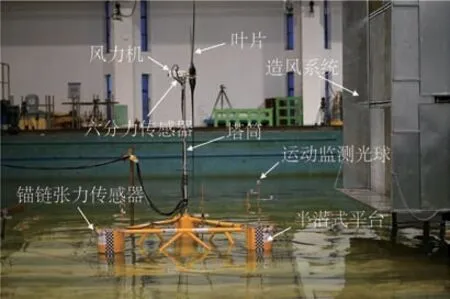
圖6 浮式風力機水池試驗模型及布置Fig.6 Model and layout of a basin test for a floating wind turbine
模型試驗中模型的精確制作是最關鍵的一步,一般試驗前首先需要確立相似準則,并根據試驗條件及測試需要確定相應的縮尺比,進而制作各部件模型。浮式風力機模型試驗應滿足的相似準則包括[87]:
1)幾何相似:LsLm=λ,其中,L為線尺度參數,s、m 分別代表原型和模型,λ為縮尺因子。試驗中的線性尺度參數,如長度、型深、重心坐標、水深、波高及波長等,均須滿足幾何相似條件。
2)弗勞德數(Froude number)相似:VmgLm=VsgLs,表示模型與原型之間的重力和慣性力相似。其中V、L分別為特征速度(包括波浪水質點速度和風速等)、特征線尺度。
3)雷諾數(Reynolds number)相似:LmVmν=LsVsν,保證模型和實體之間慣性力和黏性力的正確相似關系。其中ν為流體的運動黏度。由于風力機的空氣動力性能與空氣黏性密切相關,因此滿足雷諾數相似可以保證模型風力機與實體之間具有相同的空氣動力學性能。
4)葉尖速比(λR)相似:ΩmRmVwm=ΩsRsVws,其中,Ω為風輪旋轉角速度,Vw為來流風速,R為葉輪半徑。滿足λR相似可以保證模型與實體之間的風輪旋轉速度和由于風輪轉子不平衡所產生的系統激振頻率以及塔影效應影響相同。
5)KC 數(Keuligan-Carpenter number)相似:VmTmLm=VsTsLs,保證模型和原型之間阻力和慣性力的正確相似關系,其中T為波浪周期。在滿足弗勞德數相似條件下,KC數也同時滿足。
6)斯特勞哈爾數(Strouhal number)相似:fmLmVm=fsLsVs,保證模型和原型之間渦激運動響應的正確相似關系。其中f為渦泄頻率。
7)結構剛度相似:KmKs=λ,模型與原型之間結構剛度相似可以保證結構固有頻率和變形相似。
根據以上相似準則可推導出模型與原型之間關鍵物理量的比尺關系如表2所示。
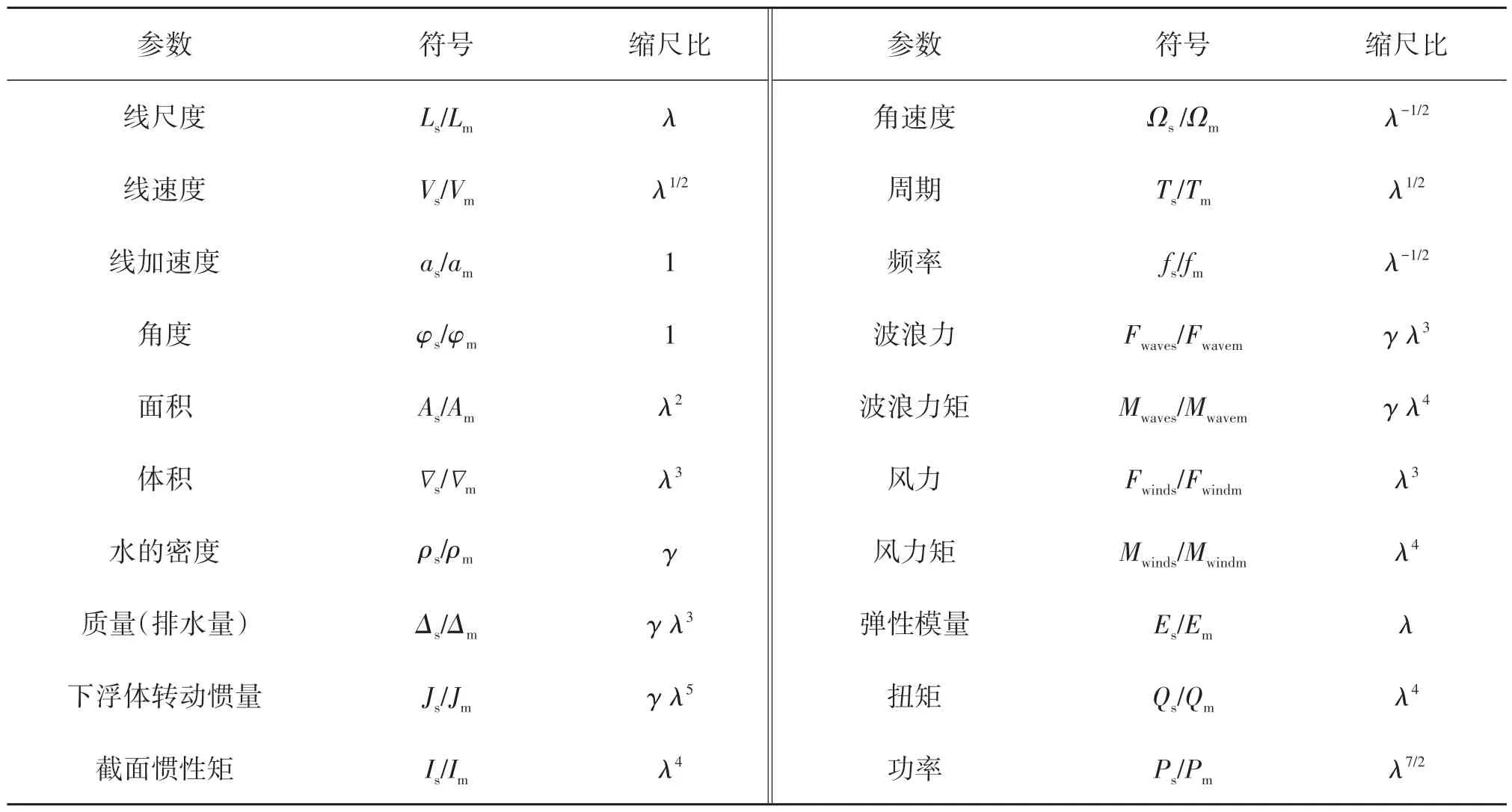
表2 浮式風力機模型試驗原型與模型各種物理量的轉換關系Tab.2 Scaling factors relating the model and prototype
實際試驗中模型與原型無法做到全相似,考慮到機組載荷和環境載荷是動力響應的主要影響因素,正確模擬重力、慣性力和風輪推力對于預報浮式風力機耦合動力響應至關重要,因此一般首選弗勞德數相似。但在滿足弗勞德數相似的條件下,雷諾數不能滿足相似,由此造成二者力學性能上的差異稱為“尺度效應”。尺度效應主要影響風力機氣動載荷、下浮體及錨泊系統的黏性效應以及下浮體的渦激運動響應。
對于黏性效應,當浮體尺度足夠大時其占比較小可忽略不計,但對于Spar 型浮體、張力腿型的張力筋腱,尺度效應會影響水池試驗中渦激運(振)動響應的測試,此時建議在拖曳水池中單獨開展渦激運(振)動試驗。如何處理尺度效應對風力機氣動荷載的影響是目前模型試驗的重點和難點,截至目前,還沒有一種可以實現無瑕疵模擬真實風力機氣動性能的試驗方法,常用的模擬風力機氣動力荷載的方法主要有4種:
方法一:采用推力圓盤模擬氣動推力。2009年,Cermelli等[88]在加州大學伯克利分校對半潛型浮式風力機進行了模型試驗,為保證推力相似,上部采用圓盤模擬。推力圓盤可簡單有效地模擬風力機的氣動推力,這對于測試浮式風力機的整體運動和動態響應是比較關鍵的,然而,由于缺少葉片,推力盤不能模擬如空氣動力扭矩、倍頻力等其他空氣動力載荷。
方法二:采用幾何匹配的葉片進行氣動力等效。風力機模型葉片不僅要求氣動力相似,還要求轉子引起的旋轉載荷也要相似。早期的水池試驗通常采用葉片幾何相似的做法來滿足上述要求。2005年,Hywind項目在Marintek 波浪水池進行的試驗中首次使用了幾何匹配的葉片[89]。2011 年,DeepCwind 項目[90]在MARIN 波浪水池中開展的模型試驗同樣采用了幾何相似的葉片,但由于弗勞德數相似下雷諾數的降低,導致模型的氣動推力達不到目標推力,為此,試驗采用了提高風速的方法獲得了目標推力。與推力盤相比,幾何匹配葉片可以模擬更多氣動載荷細節,如湍流風脈動和倍頻力等,然而卻不能精確地模擬氣動力矩。
方法三:采用性能匹配的葉片進行氣動力等效。在弗勞德數相似定律下,幾何匹配的葉片雷諾數較小,導致風力機模型氣動力性能降低,為此,Martin等[91]提出了使用低雷諾數翼型重新設計葉片模型的方法。重新制作性能匹配的葉片能滿足在弗勞德數相似的情況下獲得期望的氣動力性能,同時在試驗中可以模擬變槳控制系統,該方法是目前模型試驗中最推薦的方法。
方法四:實時混合模型試驗方法[92]。該方法將模型分為物理子結構和數值子結構。物理子結構是指試驗測試的模型,而數值子結構是使用計算機進行數值模擬生成的。在每個時間步,從數值子結構導出的運動或力的命令通過執行器施加到物理子結構上,同時物理子結構測試的運動或力反饋到數值子結構,用于后續時間步的計算。該方法理論上可以利用數值計算生成更準確的氣動荷載,但目前仍具有局限性:
1)目前氣動荷載的數值模擬主要基于葉素動量(BEM)和廣義動態尾流(GDW)理論,這些理論能夠保證氣動載荷一定的精度,但是,他們也包含近似理論和經驗模型,其準確性往往取決于具體的應用條件,在條件不適宜時可能會導致錯誤。
2)為了滿足試驗實時性交互的要求,需要進行快速和高頻計算,因此,在數值子結構中往往對模型進行簡化處理,如將葉片視為剛體,盡可能減少葉片單元的數量,這會導致計算精度的降低。
3)湍流風場的生成缺乏全面可靠的數據,只能參考相關規范和經驗,存在不確定性。
4)數值子結構中所采用的計算方法對時間步長要求嚴格,在試驗中難以與物理模型匹配。
綜上所述,當前模型試驗仍然是研究浮式風力機動力性能的重要途徑,但如何通過更合理的模型等效或試驗方法來實現更準確的原型預測是模型試驗需要進一步研究的方向,目前采用性能匹配的葉片進行氣動力等效是模型試驗中獲得風力機氣動力性能最為可靠且推薦的方法。
3.2 數值仿真及工具開發
數值仿真成本低、速度快、精度高,是浮式風力機動力學研究最普遍使用的方法。然而,浮式風力機涉及氣動—水動—伺服—系泊—錨土耦合,具有較強的非線性,其分析理論涉及多學科交叉,如何建立精確有效的數值模型及模型動力學求解是數值仿真技術研究的重點和難點。
浮式風力機動力學數值模型可以歸納為結構動力學模型、空氣動力學模型、流體動力學模型以及他們之間的相互耦合。頻域法和時域法是浮式風力機數值計算常用的方法,通過頻域法可以得到浮體關鍵水動力參數,包括附加質量、勢流阻尼、幅頻響應RAO、一階波浪力傳遞函數、二階波浪力傳遞函數等。頻域計算時在隨機波η作用下,浮式風力機所受的一階及二階和頻、差頻波浪載荷可表示為:
式中:F1(ω)為一階波浪力傳遞函數(LTF);F2s(ω,ω)為二階和頻波浪力傳遞函數;F2d(ω,ω)為二階差頻波浪力傳遞函數。
典型浮式風力機數值仿真水動力模型如圖7所示,其頻域計算得到的二階波浪力傳遞函數三維圖如圖8所示。頻域法計算效率高,但無法準確仿真系統非線性特征,無法捕捉瞬態響應,難以實現浮式風力機多體耦合的精確分析,故對于復雜的耦合非線性的研究必須采用時域法,即通過生成代表性的海洋環境條件,并基于時間步進方法將其作用于浮式風力機多體耦合模型,最終得到每個時間步對應的動力響應,DNV 規范要求浮式風力機系泊分析必須采用時域方法[93]。
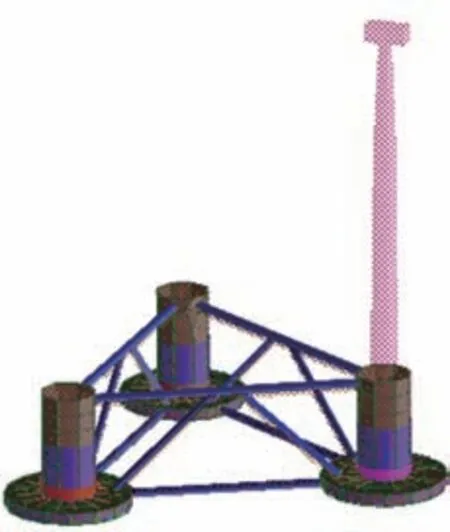
圖7 浮式風力機水動力仿真模型Fig.7 Hydrodynamic simulation model for a floating wind turbine
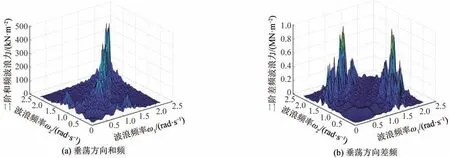
圖8 典型頻域方法計算二階波浪力傳遞函數[94]Fig.8 Calculation of second-order wave force transfer function using frequency domain method
在浮式風力機數值分析方面諸多學者已進行了大量研究。MIT 的Lee[95]對浮式風力機非線性波浪荷載數值計算方法進行了研究;Lupton[96]提出了將結構動力模型、空氣動力模型、水動力模型以及伺服模型分別線性化再耦合計算的頻域方法;Karimi[97]利用FAST 和WAMIT 開發了一種風力機—浮體—系泊耦合分析頻域模型;Cui 等[98]基于雙多流管模型、三維勢流理論、懸鏈線理論研發了氣動—水動—系泊耦合模型并對垂直軸浮式風力機進行了時域分析;此外,Hegseth 和Bchynski[99]、Karimi 等[100]以及Pegalajar-Jurado 等[101]也對浮式風力機數值計算模型進行了研究。但目前所有研究在處理氣動荷載、多體耦合、非線性響應等方面仍存在許多不足。
隨著浮式風力機各種數值模型的發展,部分模型被包裝成利于使用的專業軟件,其中,美國可再生能源實驗室(NREL)開發的FAST(現為OpenFAST)[102-103]是浮式風力機動力分析使用最廣泛的數值工具之一,包括氣動模塊AeroDyn、水動模塊HydroDyn、控制模塊ServoDyn、動力求解模塊ElastoDyn 等,通過該軟件可實現氣動—水動—系泊耦合時域分析[104],并可模擬轉速調節、偏航、變槳等行為。挪威科技大學工業和技術研究協會(SINTEF)開發的SIMA程序[105]也是常用的浮式風力機動力學分析工具,集成了SIMO和RIFLEX 兩個模塊,目前該程序已被DNV 融入到了SESAM 軟件中,可成功調用SESAM 水動力計算結果,且可與著名的氣動力軟件Bladed[106]結合使用。Orcina開發的OrcaFlex[107]是另一款海洋工程時域分析工具,該工具開發之初需借助FAST進行風力機氣動荷載計算,近年來該軟件做了較大升級,目前已具有了控制模塊和氣動力計算的功能,可獨立進行浮式風力機耦合動力分析。丹麥技術大學(DTU)開發的HAWC2[108]也是浮式風力機動力學求解的一款較好軟件,但其水動力模塊只內置了Morison 方程,對于大型浮體需要調用外部水動力荷載和系泊荷載。此外,還有挪威NTNU 大學[109]研發的AeroDyn/SIMO/Riflex,胡志強[110]研發的DARwind,Yang等[111]開發的FAST2AQWA以及CAT4IFES等都是可用于浮式風力機耦合動力學仿真的工具。為便于了解不同工具的特點,表3對常見的浮式風力機數值軟件及其采用的基本理論進行了統計,可以看出大部分工具采用的理論比較類似,然而它們在時域模型建立時也幾乎都需要來自頻域求解器的輸入,即在時域分析前需首先進行頻域分析。常用頻域分析工具有WAMIT、AQWA等,通過頻域求解輻射、衍射問題得到相關動力學系數后傳遞到時域工具即可進行時域計算。

表3 浮式風力機系統動力學求解軟件匯總[10,110,112]Tab.3 Numerical software for solving dynamic response of floating wind turbines
數值仿真工具的計算精度和效率是人們關注的重點,為此諸多學者和機構開展了大量不同軟件之間以及軟件與物模試驗之間的對比研究。比較知名的是國際能源署(IEA)資助的OC3~OC6項目[4-7],其中OC3和OC4項目對不同理論及不同軟件的計算結果進行了比較,發現在波頻范圍內對于半潛風力機采用勢流理論與采用Morison方程具有類似的結果,但是勢流理論計算的俯仰運動響應大于Morison公式法計算的結果,而采用Morison 公式法計算的黏性力要大于采用等效阻尼矩陣法的結果;同時發現,不同軟件在計算浮體平均漂移力和二階慢漂響應時存在較大的差異。OC6 項目[113]對軟件計算結果與物模試驗結果的差異進行了研究,發現大多數數值軟件對極端荷載和疲勞荷載有所低估,數值軟件非線性差頻荷載計算不準確導致浮式風力機縱蕩和縱搖自由度的低頻響應及在固有頻率附近的非線性響應被低估,推測是由于仿真工具缺少準確預測非線性以及低頻荷載所需的一些物理參量造成的。
隨著計算機軟硬件性能的提高,近年來基于CFD 的數值仿真技術也在浮式風力機動力學研究中廣泛應用,如:Tran 和Kim[114-115]基于CFD 和面元法開發了浮式風力機耦合動力求解程序;Cheng 等[116]、Cheng 和Wan[117]基于CFD開源工具OpenFOAM 和重疊網格技術開發了naoe-FOAM-SJTU用于浮式風力機耦合動力學求解。CFD 技術主要是通過對流體運動基本控制方程(Navier-Stokes方程)進行直接求解或模型化求解得到流場及結構響應相關信息,研究發現CFD 法能夠更準確地預測浮式風力機在縱蕩和縱搖自由度的載荷[112,118],為此可根據CFD 結果對軟件工具進行進一步的優化改進。雖然CFD 技術能夠提供精度較高的結果,但在浮式風力機動力分析方面還有很多問題有待解決,如CFD 仿真存在成本高、周期長及計算結果不確定性大等問題。
通過研究可以發現目前浮式風力機動力學數值分析方法還不甚完善,大部分工具的動力學模型基本都采用了簡單的強行界面耦合法或迭代計算法,這些方法無法準確反映浮式風力機多體耦合及流固耦合的本質,故對于浮式風力機全耦合數值模型的開發及優化仍具有必要性。另一方面對于氣動荷載、非線性波浪荷載計算程序的優化及精度提高也是下一步的研究重點。考慮到數值方法與物理模型試驗的優缺點,在很長一段時間內數值仿真結合物模試驗的方法將是浮式風力機動力響應研究的主要方法。
3.3 漂浮式樣機與設計規范
浮式風力機樣機測試是通過在原型樣機上布設傳感器直接測得各組成動力響應的方法。一般浮式風力機在大規模推廣前都要通過樹立樣機對其運行狀態進行測試和分析。樣機測試成本高且存在一定風險,故樣機設計時一般都需經嚴格的數值仿真或模型試驗對其動力特性進行研究。世界上第一臺浮式樣機是2009 年的Hywind Demo 樣機,該樣機采用單柱式平臺,測試機組為2.3 MW,經過數年運行監測,得到了一手數據,驗證了技術可行性,最終以該樣機為基礎的6 MW浮式風力機于2017年被應用于Hywind Scotland風電場。與此類似,2011年Principal Power在葡萄牙開展了半潛型浮式風力機樣機測試,該樣機采用Windfloat主動調載技術,浮體為帶垂蕩板的三立柱結構,采用2 MW Vestas 機組,測試時間為5 年,期間根據測試結果對原設計進行了多輪技術優化和迭代,2019 年以該樣機為基礎的單機8.3 MW 的浮式風力機在葡萄牙實現商業化應用。日本在2013—2016年也開展了浮式風力機樣機測試項目,其在福島先鋒項目中安裝了3臺基礎不同、容量不等的浮式樣機。近幾年,中國也逐步開始了浮式風力機樣機試驗,2021 年,中國“三峽引領號”半潛型浮式風力機下水,開啟中國漂浮式樣機元年,之后“扶搖號”、“海油觀瀾號”也分別于2022 年和2023年相繼下水,目前還有龍源電力集團股份有限公司的“國能共享號”以及明陽智慧能源集團股份公司的“OceanX”雙轉子浮式樣機項目也在建造中,預計將于近期下水。除此之外其他國家相關研究團隊也進行了大量樣機測試工作,表4 匯總了目前全球主要的漂浮式海上風電項目。浮式風力機樣機測試能夠獲得實際海況下樣機運行數據,可直接驗證技術的可行性,并為浮式風力機設計優化、發電量提升提供依據,但目前大多數的樣機實測數據處于未公開狀態。

表4 全球浮式風力機樣機項目匯總Tab.4 Comprehensive overview of prototype projects for floating wind turbines worldwide
樣機測試技術難點在于樣機設計本身,樣機設計一般做法是參考相關標準或規范進行,大部分規范會對浮式風力機組成、動力響應計算方法、工況校核標準進行詳細介紹。目前比較有代表性的標準或規范主要有IEC 標準[119]、DNV 規范[93,120]、ABS 規范[27,121],近期中國船級社CCS 也發布了《海上浮式風機平臺指南》[122]。由于目前浮式風力機運行數量較少,以上標準或規范尚不完善,不同規范之間也存在較大差異,部分規范更是直接借鑒海洋油氣行業的做法,這導致浮式風力機設計過程中許多動力分析方法、參數取值、校核標準并不完全合理。以浮式風力機系泊設計為例,ABS規范借鑒了海洋油氣領域規范《API RP 2SK》[123]的分析方法,只在輸入和安全系數上做了調整,系泊分析時允許采用頻域或時域的方法,系泊張力校核時采用的是單一安全系數法,直接將系泊張力與錨鏈破斷強度進行比較,但與《API RP 2SK》相比環境重現期由100年降低為50 年,并分成了有冗余設計和無冗余設計兩種情況,對生存工況下的衡準系數也由1.25 調整為了1.05。DNV 規范在其海工規范《DNV GL-OS-E301》[124]基礎上做了較大修改,環境重現期由100 年降低為50年,海工規范《DNV-OS-E301》中允許采用頻域方法或時域方法,而在浮式風力機規范,《DNV-ST-0119》[93]中只允許采用時域方法,系泊張力計算方法方面兩個規范都采用抗力分項系數法,不同的是《DNV-OS-E301》采用錨鏈預張力與環境荷載產生的特征張力進行分項組合,而《DNV-ST-0119》采用的是平均張力與動態張力進行分項組合,其中平均張力是由錨鏈預張力、靜態風、流力以及波浪漂移力產生,而動態張力是由波頻和低頻振蕩產生的。目前DNV規范更多的考慮了浮式風力機本身的動力特征,在行業內認可度較高。中國浮式風力機技術發展較晚,目前CCS 發布的浮式風力機設計指導性文件還比較簡略,其系泊分析直接指向了《海上移動平臺入級規范》[125],且未對采用的環境重現期做出嚴格規定,分析方法接受頻域或時域方法,系泊張力校核采用單一安全系數法,對風力機本身高聳結構、動力荷載長期循環等特征的考慮略顯不足。從以上分析可以發現,浮式風力機相關的規范和標準還處于待完善和待驗證階段。浮式風力機與海洋油氣分屬不同行業、安全等級不同、失效后造成的后果也不同,直接借鑒油氣行業的設計標準會造成設計不合理。浮式風力機設計時應根據所在海域及當地要求甄別選擇適合的標準和規范。同時,也要充分利用樣機測試數據對現有標準或規范進行校驗和修訂,以使其更好地指導浮式風力機的設計及研究工作。
4 結 語
經過數十年的發展,浮式風力機在理論、數值仿真及應用技術方面都取得了較大進展,但作為一種新興技術,浮式風力機動力學具有機理復雜性和獨特性,下一步仍需對其進行研究,研究方向可重點關注:
1)浮式風力機機組及基礎的研發及優化。機組方面包括大型化浮式機組的研發,大型葉片結構、氣動荷載的研究,控制策略的優化及降載技術的研究;此外,AI、大數據等新興技術在機組研發中的應用,特別是在控制策略優化方面的應用也是機組研究的重要內容。浮式基礎方面主要包括浮體的輕量化設計、混凝土等新材料的應用研究以及新型基礎結構的水動力性能研究。此外,浮式風力機平臺與波浪能、養殖網箱等的融合研究也是浮式基礎研究的重要內容。
2)浮式風力機多場、多體耦合動力響應研究及數值工具開發。浮式風力機氣動—水動—結構—伺服耦合動力分析難度較大,特別是氣動荷載、非線性波浪荷載、流固耦合計算方法以及剛柔多體耦合模型的建立仍存在較大挑戰。雖然已存在FAST、OrcaFlex、SIMA 等工具可實現浮式風力機耦合分析,但這些工具在模型建立時存在諸多近似或假設,在計算準確度和效率方面有較大優化空間,且目前國內尚無一款自主研發的一體化仿真工具,故耦合模型的研究及數值工具的開發將是中國浮式風力機領域亟需攻克的技術問題。
3)浮式風力機模型試驗方法研究。由于模型試驗無法實現全相似,導致預測精度存在差異,特別是模型氣動荷載的等效方面目前還存在諸多難點,下一步浮式風力機模型試驗方法的改進及預測精度的提高仍將是浮式風力機領域研究的重要方向之一。
4)浮式風電場級研究及系泊優化。不同于固定式海上風力機,浮式風力機運動響應對氣動荷載更加敏感,浮式風電場內尾流效應對風力機運動及發電量的影響是未來需要研究的問題之一;此外,深海浮式升壓站技術是浮式風電場規模開發需要面臨的另一問題。系泊系統方面,目前中國浮式樣機大多采用9根錨鏈,數量明顯多于國外,下一步系泊系統優化及場級共享錨泊的研究將是重要研究內容之一。
這里對浮式風力機的分類特征、主要動力學問題及其研究方法進行綜述,總結了浮式風力機空氣動力學、水動力學、結構動力學、控制動力學相關理論及研究現狀,并對氣動荷載、水動荷載的計算方法以及二階波浪力、畸形波等特殊非線性動力學問題進行了介紹,闡述了浮式風力機動力學研究的模型試驗方法、數值仿真方法、樣機測試方法。浮式風力機動力學問題復雜,這里僅對部分特征問題進行了介紹,以期為相關研究人員提供借鑒和參考,隨著后續研究的不斷深入,可以預見大規模漂浮式海上風電場將成為現實。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
