3T1R并聯機構運動學分析與多目標優(yōu)化設計
2024-03-11 09:09:08張莉,朱磊
機械設計與制造工程 2024年2期
張 莉,朱 磊
(1.江蘇安全技術職業(yè)學院機械工程系, 江蘇 徐州 221011)
(2.中國礦業(yè)大學材料與物理學院, 江蘇 徐州 221116)
三平移一轉動(3T1R)并聯機構廣泛應用于高速分揀、搬運和碼垛等工程應用領域[1-2]。近年來專家學者對3T1R并聯機器人機構的研究越來越多[3]。如章鵬程等[4]構造的新型3T1R力觸覺主端操作并聯機構;劉偉等[5]根據位移流形理論對具有固定轉動軸線和變轉動軸線特性的3T1R機構進行構型綜合,設計了具有兩種運動模式的3T1R并聯機構;沈惠平等[6]根據并聯機構拓撲結構設計理論提出一種低耦合度三平移一轉動并聯機構;Zhao等[7]提出一種具有空間三維移動且繞z軸轉動的4PPa-2PaR結構的四自由度并聯機器人,具有幾何對稱、運動學簡單、平移工作空間沿直線方向無限擴展等優(yōu)點。基于以上研究內容,本文提出一種具有三平移一轉動的四自由度2-P(RPR_RRR)R并聯機器人機構。
1 機構設計
1.1 機構模型介紹
圖1為2-P (RPR_RRR) R并聯機構結構簡圖,支鏈1和支鏈2均由RRR構成,Ri1∥Ri2∥Ri3(i=1,2),Ri1∥Ri3⊥Pi2(i=3,4),其中R14、R24均垂直于動平臺平面。動平臺內切圓半徑為r,R11到P1與R21到P2的距離均為m1,R31到P1與R41到P2的距離均為m2。移動副P1和P2的最大位移為l1,移動副P32和P42的最大位移為l2。機構三維模型如圖2所示。

圖1 2-P(RPR_RRR)R并聯機構結構簡圖

圖2 2-P(RPR_RRR)R并聯機構三維模型
1.2 機構的自由度計算
進行自由度分析前需要確定每個回路方程的獨立位移方程數[8],分析過程如下:
1)確定第1個獨立運動回路位移方程數,第1個獨立運動回路由單開鏈SOC{P1-R11-R12-R13-}與SOC{-R31-P32-R13}構成:
ξL1=dim{Mb1∪Mb2}=
(1)
式中:ξL1為第1個回路的獨立位移方程數,Mbi為每條支鏈的方位特征集,t表示移動副,r表示轉動,dim為方位特征集的維數。
第1個獨立運動回路子并聯機構的自由度為:
(2)
式中:F1-2為第1個獨立運動回路的自由度,fi為支鏈第i個運動副的自由度,ξLj為第j個回路的獨立位移方程數。
2)確定第2個獨立運動回路位移方程數,子并聯機構由單開鏈SOC{P2-R21-R22-R23-}與SOC{-R41-P42-R24}構成:
ξL2=dim{Mb1∪Mb2}=
(3)
第2個獨立運動回路子并聯機構的自由度為:
(4)
3)確定第3個獨立運動回路位移方程數,第3個獨立運動回路由單開鏈SOC{-R14-}與SOC{-R24-}構成:
ξL3=dim{MR∪(MH1∩MH2)∪MR}=4
(5)
并聯機構自由度F1-2-3為:
(6)
式中:MR為單開鏈SOC{-R14-}的方位特征集,MH1和MH2分別為混合支鏈1和混合支鏈2的方位特征集。
由上述分析可知,機構執(zhí)行末端具有空間三維移動和繞z軸轉動的運動特性。
2 運動學分析
2.1 位置逆解分析
在底座、動平臺上定義靜坐標系{o-xyz}、動坐標系{o-uvw}。根據位置輸出位姿向量p(x,y,z,θ)T分析得到主動副輸入位移(d1,d2,d3,d4),將動坐標系下的位置坐標轉換成靜坐標系下坐標的轉換矩陣TOP為:
(7)
式中:θ為旋轉角度。
Ri4點在動坐標系下的坐標向量pR14(0,-r,0)T和pR24(-r,0,0)T,利用坐標轉換原理可得Ri4點在靜坐標系下坐標向量:
(8)
根據位置特點,可得逆解表達式:
(9)
2.2 位置正解分析
可根據式(9)推導得到位置正解(x,y,z,θ)表達式:
(10)
根據上述正解表達式可知機構的位置正解有4組。
2.3 位置逆解算例分析
隨機生成幾組(x,y,z,θ)值,利用式(9)得到輸入位移值(d1,d2,d3,d4),令r=0.2 m,m1=0.1 m,m2=0.1 m,得到的位置逆解算例見表1。

表1 逆解算例
由表可知,一組(x,y,z,θ)參數只能得到一組運動輸入值。
2.4 位置正解算例分析
根據2.3節(jié)的結構參數和表1的部分運動輸入值,通過式(10)得到正解(x,y,z,θ),詳見表2。

表2 正解算例
算例分析得到的正解和表1的逆解可以相互驗證,證明了正解公式的正確性。
3 奇異分析
3.1 機構雅可比矩陣

(11)
其中:
M12=M13=M14=M21=M23=M24=M31=M42=0
M11=M22=1
M32=-2(m2-y+rcosθ)
M33=2(z-m1)
M34=2(m2-y)
M43=2(z-m1)
M41=-2(m2-x+rcosθ)
M44=2(m2-x)
式中:JX為正雅可比矩陣,Jd為逆雅可比矩陣。
由此可計算得到:
(12)
式中:det()表示矩陣行列式的值。
3.2 逆解奇異性分析
逆解奇異滿足條件為det(Jd)=0且det(JX)≠0,令det(Jd)=0,即d3=0或d4=0兩種情況。由于移動副的限制,這類情況無法出現,因此這類奇異不存在。
3.3 正解奇異性分析
正解奇異滿足條件為det(Jd)≠0且det(JX)=0,令det(JX)=0,即{z=-m1,x=y},當R31、R41、p共面時正解奇異出現。正解奇異如圖3所示。

圖3 正解奇異
4 工作空間分析
工作空間是評價并聯機構運動性能的重要指標[9]。取動平臺半徑r=0.2 m,m1=0.05 m,m2=0.05 m;移動副P1和P2的最大位移l1=0.4 m,移動副P32和P42的最大位移l2=0.4 m。采用蒙特卡洛法完成可達工作空間以及定姿態(tài)工作空間搜索。
4.1 可達工作空間分析
選擇上述尺寸參數進行并聯機構工作空間算例分析,搜索得到的可達工作空間如圖4所示。
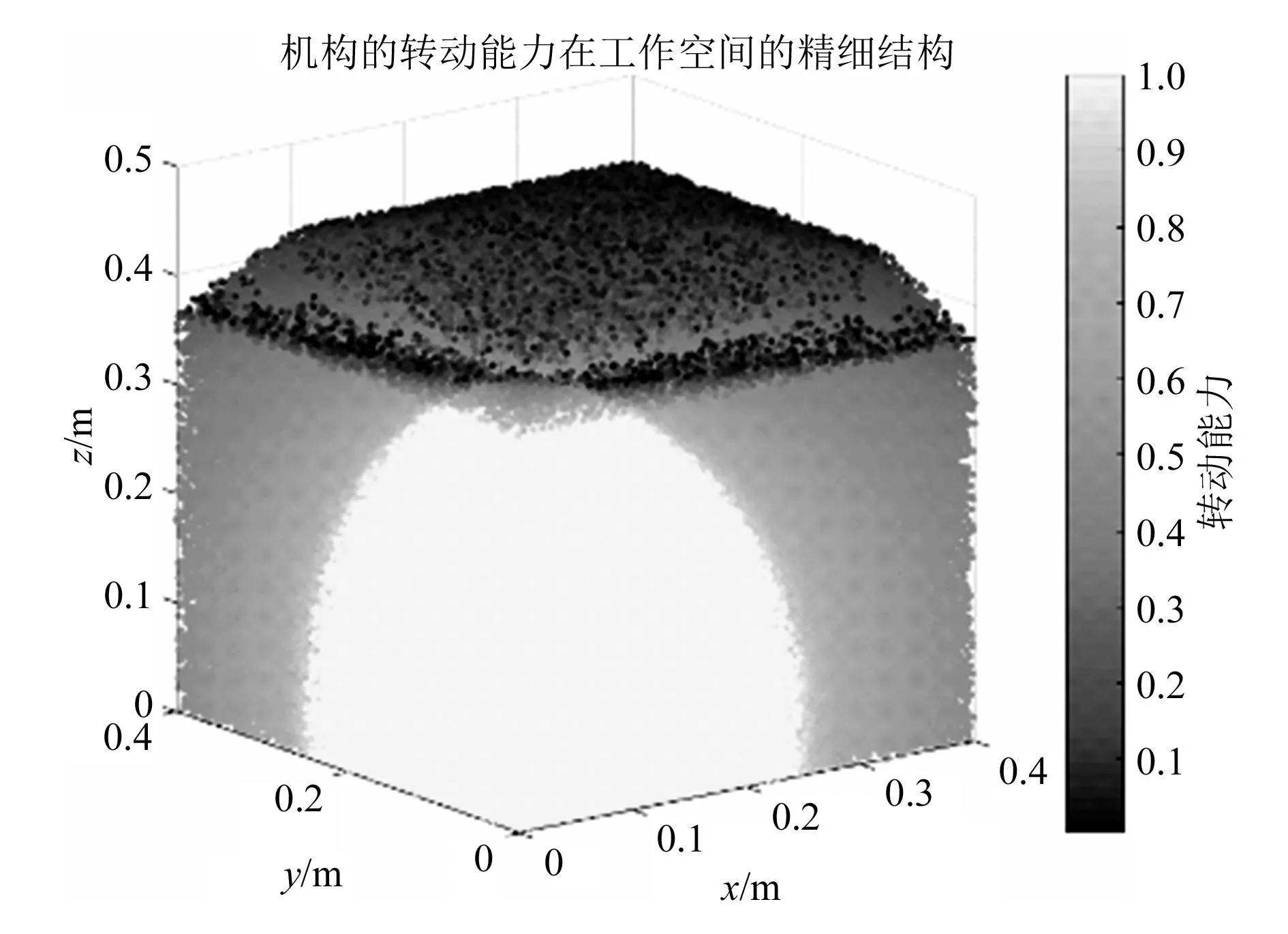
圖4 3T1R機構可達工作空間轉動能力分布圖
由圖可得:工作空間呈對稱分布,沿著各個投影面為正方形,沿著z軸方向呈中間高兩邊低分布;無空洞且邊界光滑。
4.2 定姿態(tài)工作空間分析
以姿態(tài)角0°、60°、120°作為算例對機構在不同姿態(tài)角下的定姿態(tài)工作空間進行分析,如圖5所示。

圖5 3T1R機構定姿態(tài)工作空間圖
分析可知:姿態(tài)角越大所對應定姿態(tài)工作空間越小,且不同姿態(tài)角下沿著xoy投影的形狀均為正方形;姿態(tài)角為0°、60°時的定姿態(tài)工作空間接近于正方體,姿態(tài)角為120°時的定姿態(tài)工作空間為1/4半錐形。
4.3 轉動能力分析
選擇上述尺寸參數進行搜索得到轉動能力,即機構的執(zhí)行末端在可達工作空間內的任意點的最大轉角范圍,得到不同高度下的轉動能力(本文用數值量化轉動能力),如圖6所示。

圖6 3T1R機構可達工作空間轉動能力分布圖
由圖可知,絕大部分工作空間的轉動能力都較大(指標大于0.5),在靠近z軸的部分有較大的空間轉動能力,這部分體積占比為25.13%。分析不同高度截面下的轉動能力可知:整周轉動的面積逐漸減少,并且形狀為正方形。
5 多目標參數優(yōu)化設計
5.1 優(yōu)化模型的建立和算法選擇
為了選取合適的機構設計參數,現以工作空間體積和全局轉動能力作為優(yōu)化設計目標,建立機構的多設計參數多目標優(yōu)化模型,分別以工作空間體積V和轉動能力指標T為優(yōu)化目標,具體約束如下所示。
(13)
(14)
優(yōu)化采用NSGA-II算法[10]。其中,經典算法選擇迭代次數為100、種群大小為300,適應度計算方法采用非支配排序法,重組方式選擇分散重組,交叉分布數量為20,變異分布數量為20。,得到了約束條件下的Pareto優(yōu)化前沿解集,如圖7所示。

圖7 Pareto優(yōu)化前沿解集
由圖可知,在體積小于0.85 m3的區(qū)域,全局轉動能力都在0.92以上,在這個區(qū)域兩個優(yōu)化目標背離程度較低;在體積大于0.85 m3的區(qū)域,轉動能力迅速降低,此時兩個優(yōu)化目標背離程度較大,體積為0.98 m3時,全局轉動能力已經降到0.62。可以根據需求從此優(yōu)化前沿解曲線中,獲得滿足兩個目標的參數值,部分的Pareto優(yōu)化解列于表3中,并得到轉動能力占比η。

表3 部分Pareto解
5.2 優(yōu)化算例
根據5.1節(jié)仿真結果,列出了部分參數下的轉動能力空間分布,如圖8所示,并且計算整周回轉的工作空間占比,見表4。可以發(fā)現參數優(yōu)化后整周回轉工作空間占比都較高,第二組參數得到的最高占比為95.0%,形狀接近于一個長方體,第4組參數轉動能力為1的占比為87.6%。通過算例和多目標能夠指導實際的參數選擇,以此平衡轉動能力和工作空間大小。

表4 整周回轉的工作空間占比

圖8 優(yōu)化后的工作空間
6 結束語
本文構造的結構簡單、具有解析式位置正解的2-P(RPR_RRR)R并聯機器人機構可以改變執(zhí)行末端姿態(tài)方向且可以沿著任意方向移動。根據奇異性分析可知,機構不存在逆解奇異,當動靜平臺共面且支鏈1和支鏈2移動輸入位移相同時,機構存在位置正解奇異。研究表明:機構的操作性能較好,具有較大的可達工作空間和定姿態(tài)工作空間;工作空間邊界光滑、對稱分布,無明顯空洞情況。
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
