中性浮力水下機械臂關(guān)鍵技術(shù)研究
2024-03-07 08:32:56韓亮亮晁建剛王衛(wèi)軍張崇峰
載人航天 2024年1期
關(guān)鍵詞:機械
楊 健, 韓亮亮, 晁建剛, 浣 上, 王衛(wèi)軍, 張崇峰
(1.上海宇航系統(tǒng)工程研究所, 上海 201108; 2.上海市空間飛行器機構(gòu)重點實驗室, 上海 201108;3.中國航天員科研訓(xùn)練中心, 北京 100094)
1 引言
空間站屬于中長期飛行的載人航天器,需要航天員出艙進行在軌維修和故障排除[1]。 機械臂系統(tǒng)作為中國空間站建造、運營、維修及拓展等過程中不可或缺的關(guān)鍵設(shè)備,用于協(xié)同航天員完成艙外建造、維護維修,以及艙外載荷操作任務(wù)[2?3]。
航天員在失重環(huán)境下作業(yè)方法和技巧會發(fā)生改變,為模擬微重力環(huán)境下的效應(yīng),航天員需要在水下環(huán)境進行出艙任務(wù)訓(xùn)練[4?6]。 為使站在機械臂末端的航天員能在地面訓(xùn)練中感受到與在軌狀態(tài)一致的運動與操作感受,出艙活動水下試驗亟需一臺在作業(yè)模式、操作體驗等各方面最大限度模擬真實機械臂產(chǎn)品的水下機械臂,用以提高航天員在模擬失重環(huán)境下進行出艙活動試驗和訓(xùn)練的效果。
本文結(jié)合任務(wù)需求概述水下機械臂的總體方案,分析水下機械臂與空間機械臂相比存在的技術(shù)問題,并對關(guān)鍵技術(shù)進行攻關(guān),最后進行了水下連續(xù)試驗驗證。
2 水下機械臂概述
為滿足航天飛機出艙活動的訓(xùn)練需求,NASA 在約翰遜航天中心建造了失重環(huán)境模擬設(shè)備(Weightless Environment Training Facility,WETF),可以容納航天飛機全尺寸模型,用于水下航天員太空出艙活動訓(xùn)練。 為滿足國際空間站的出艙活動訓(xùn)練,NASA 建造了中性浮力實驗室(Neutral Buoyancy Laboratory, NBL)用于配合航天員模擬失重訓(xùn)練[7?8]。 NBL 可以容納國際空間站的幾個艙段模型,并配置了尺寸和構(gòu)型與空間站機械臂一致的水下機械臂,如圖1 所示。 水下機械臂安裝在獨立的基座上,關(guān)節(jié)改為水壓驅(qū)動,運動控制在地面的控制室內(nèi)完成。
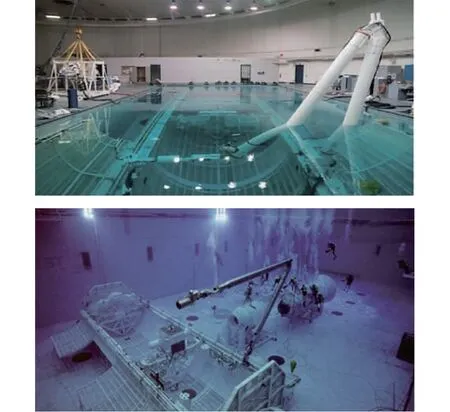
圖1 NASA 的水下機械臂[7?8]Fig.1 Underwater Manipulator in NASA[7?8]
中國空間站航天員通過腳限位器固定于機械臂末端,在機械臂的支持下進行大范圍轉(zhuǎn)移完成既定任務(wù)。 早期開展機械臂水下試驗,使用的是一套由潛水員手動驅(qū)動的簡易水下機構(gòu),只能為航天員提供定點支持功能。 由于無法提供轉(zhuǎn)運功能,航天員須離開簡易機構(gòu),在潛水員的輔助下游到新作業(yè)點,這與在軌實際情況相差甚遠,航天員無法體會在失重狀態(tài)下跟隨多自由度機械臂末端運動的感受,訓(xùn)練效果不佳。 此外,因為航天員反復(fù)上下腳限位器、潛水員挪動機構(gòu)位置等導(dǎo)致訓(xùn)練過程不連貫、訓(xùn)練效率低,已無法滿足日趨復(fù)雜的空間站出艙任務(wù)對水下試驗和訓(xùn)練的需求。
3 水下機械臂的總體方案
出艙活動水下試驗對水下機械臂的任務(wù)需求主要包括:
1)航天員固定在水下機械臂末端,由操作員操作手柄或輸入坐標位置,將航天員運送至指定位置,過程中航天員體驗機械臂的末端運動。
2)試驗過程中根據(jù)航天員的要求調(diào)整機械臂末端姿態(tài),驗證作業(yè)點位置和作業(yè)姿態(tài)設(shè)計的合理性。
3)水下機械臂鎖定位置,支持航天員開展艙外作業(yè)的訓(xùn)練任務(wù)。
水下機械臂主要技術(shù)指標要求見表1。

表1 水下機械臂技術(shù)指標Table 1 Underwater Manipulator Indicators
水下機械臂總體方案如圖2 所示。 水下機械臂通過水下基座等固定安裝在水池底部,岸上配置人機交互控制系統(tǒng)和控制與供配電系統(tǒng),為其提供電源、指令、操作控制等。
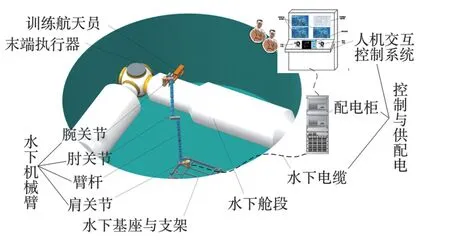
圖2 水下機械臂方案示意圖Fig.2 Scheme of underwater manipulator
空間站機械臂采用了7 自由度冗余機械臂方案,主要由7 個關(guān)節(jié)、2 個末端執(zhí)行器、2 個臂桿、1 個中央控制器以及1 套視覺相機系統(tǒng)組成。 所有關(guān)節(jié)為轉(zhuǎn)動關(guān)節(jié),關(guān)節(jié)的配置采用肩3+肘1+腕3 方案,為便于機械臂的在軌維修和更換,關(guān)節(jié)采用模塊化設(shè)計,其結(jié)構(gòu)形式完全相同。 同時配備3 臺視覺相機,肩部、肘部、腕部各1 臺,肩部和腕部相機實現(xiàn)目標的識別和位姿測量,肘部相機實現(xiàn)視頻監(jiān)視功能[3]。
按照水下機械臂在操作能力和工作空間與空間站機械臂系統(tǒng)真實產(chǎn)品相當?shù)脑O(shè)計思想,水下機械臂設(shè)計為6 個自由度,采用肩2+肘1+腕3 配置,如圖3 所示。 該構(gòu)型與空間站機械臂鎖定肩俯仰關(guān)節(jié)的構(gòu)型一致,因此6 個自由度的構(gòu)型可以滿足模擬空間站機械臂系統(tǒng)真實狀態(tài)的任務(wù)要求。 為準確反映空間站機械臂末端空間包絡(luò)與艙體的相對位置關(guān)系,腕部關(guān)節(jié)的裝配關(guān)系和尺寸參數(shù)與真實產(chǎn)品完全一致。
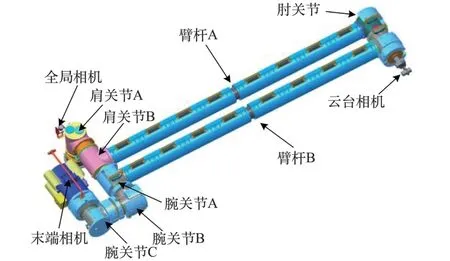
圖3 水下機械臂構(gòu)型Fig.3 Configuration of underwater manipulator
驅(qū)動關(guān)節(jié)是水下機械臂運動的核心部件,主要由電機傳動組件、諧波減速器、關(guān)節(jié)位置傳感器、應(yīng)急驅(qū)動組件、動密封組件、電氣控制組件等組成,如圖4 所示。

圖4 關(guān)節(jié)組成示意圖Fig.4 Configuration of joint
4 水下機械臂關(guān)鍵技術(shù)
針對前期試驗出現(xiàn)的單點吊掛浮力塊干擾大、水槽環(huán)境中金屬材料易腐蝕等問題,針對水下機械臂特殊的任務(wù)和功能要求,水下機械臂與空間機械臂相比存在以下技術(shù)問題:
1)水作為良好的導(dǎo)電介質(zhì),對于采用電驅(qū)動的機械臂,要解決水下密封問題;
2)水下機械臂需要通過浮力材料施加多個力來盡可能實現(xiàn)力大小和作用點的平衡,且需將浮力塊與機械臂關(guān)節(jié)賦形設(shè)計,以減少對機械臂運動的干擾;
3)水下機械臂大量使用金屬材料,在水環(huán)境介質(zhì)的作用下會產(chǎn)生多種腐蝕現(xiàn)象,為保證其使用壽命需加以防范。
4.1 水下密封技術(shù)
水下機械臂包含了關(guān)節(jié)等回轉(zhuǎn)運動的部組件,并且在關(guān)節(jié)內(nèi)部還有電機、旋轉(zhuǎn)編碼器、關(guān)節(jié)控制器等電子元器件,關(guān)節(jié)的密封性直接決定了水下機械臂是否能夠可靠地開展航天員水下訓(xùn)練活動。
密封按照其工作狀態(tài)的不同,可以分為靜密封和動密封兩大類。 靜密封是被密封部位的2 個耦合件之間不存在相對運動的密封形式。 而被密封部位的2 個耦合件之間具有相對運動的密封形式統(tǒng)稱為動密封。
O 形圈是最常用的、最簡單的一種靜密封元件,其基本工作原理是依靠密封件發(fā)生彈性變形,在密封解除面上造成接觸壓力,當此壓力大于被密封介質(zhì)的內(nèi)壓時則不發(fā)生泄漏。
泛塞是一種由非金屬夾套及彈簧組合的壓力輔助密封裝置,屬于動密封元件,在汽車、石油、化工等領(lǐng)域廣泛應(yīng)用。 密封夾套由高性能非金屬聚合材料經(jīng)精密車削成U 型外殼,泛塞安裝在密封溝槽內(nèi),彈簧將夾套唇邊緊貼密封溝槽,形成初始密封力,介質(zhì)壓力提供額外的密封力。
水下機械臂工作最大水深約為10 m,壓力約為0.1 M Pa,試驗期間水溫控制在28 ~30 ℃,水質(zhì)較為干凈,有利于O 形圈和泛塞的使用。 水下機械臂以關(guān)節(jié)部件作為基本單元進行密封,采用多重冗余手段進行防護。 第一級:機械連接界面采用O 型圈靜密封,旋轉(zhuǎn)界面采用旋轉(zhuǎn)泛塞動密封(各2 層),避免在0.1 MPa 壓力下大量水汽進入關(guān)節(jié)內(nèi)部;第二級:旋轉(zhuǎn)界面若有少量的水汽進入,關(guān)節(jié)內(nèi)部諧波減速器軸端密封也具有較好的密封效果;第三級:關(guān)節(jié)內(nèi)部元器件采用高等級防水產(chǎn)品,即使有水汽進入關(guān)節(jié)內(nèi)部,電氣元件也可以正常工作。
密封方案設(shè)計如圖5 所示。 通過動密封和靜密封的共同作用,形成了相對獨立的密封腔和過線纜通道。 其中,動密封主要包括泛塞密封組件,靜密封主要包括以O(shè) 形圈為主的外部靜密封和以膠為主的內(nèi)部靜密封。 密封組件實物如圖6所示。
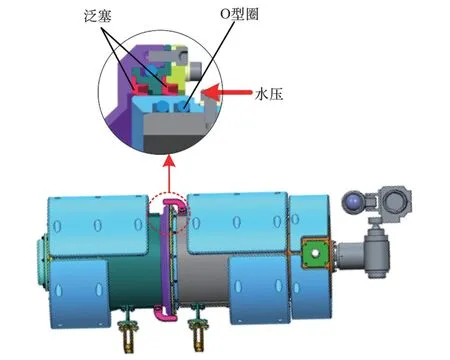
圖5 密封組件示意圖Fig.5 Sealing components
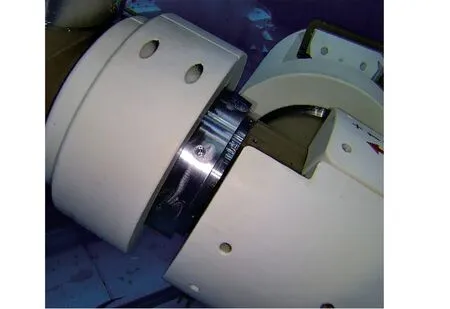
圖6 密封組件實物圖Fig.6 Physical sealing components
4.2 中性浮力配平技術(shù)
根據(jù)阿基米德原理,部分或全部浸入于靜止流體中的物體,浮力大小等于物體所排開的這部分流體所受到的重力,浮力作用點在物體排開的這部分流體原來的重心處。 一般來說,物體所受重力與浮力大小不同,物體的重心與浮心也不重合,物體會在浮力的作用下繞其質(zhì)心轉(zhuǎn)動,直到浮心位于重心的正上方,達到一個暫時的穩(wěn)定位置[9]。 當重心與浮心重合時,物體在液體中任何位置都是平衡和穩(wěn)定的,物體的這種狀態(tài)稱為隨遇平衡狀態(tài),也稱為中性浮力狀態(tài)[10]。
水下機械臂是一個6 自由度構(gòu)型可變的系統(tǒng),在機械臂運行過程中重心始終處于變化狀態(tài),但是具體到某一部件(如關(guān)節(jié)、臂桿),其重心基本不會發(fā)生變化。 因此為了在水下環(huán)境中更真實地模擬機械臂的失重狀態(tài),需要將機械臂各主要部件分開進行考慮,通過各部件的中性浮力配平來實現(xiàn)整個機械臂的力大小和作用點的平衡,各部件的重力與浮力關(guān)系如圖7 所示。

圖7 水下機械臂的重力與浮力示意圖Fig.7 Gravity and buoyancy of underwater manipulator
中性浮力配平主要包括浮力材料選取、浮力配平仿真計算、浮力塊結(jié)構(gòu)設(shè)計等環(huán)節(jié)。
泡沫浮力材料是一種由低密度調(diào)節(jié)劑填充到高強度樹脂中復(fù)合而成的聚合物基固體材料,具有密度低(0.2 ~0.7 g/cm)、吸水率低(不大于5%)、機械強度高(壓縮強度1 ~100 MPa)、耐腐蝕、可進行二次機械加工等特點。
以計算確定關(guān)節(jié)的初始質(zhì)心和浮心作為基礎(chǔ),根據(jù)關(guān)節(jié)外殼初步設(shè)計浮力塊的形狀、結(jié)構(gòu)和布局,再計算增加浮力塊后關(guān)節(jié)的質(zhì)心和浮心,通過對浮力塊形狀、大小、布局的迭代設(shè)計,直到關(guān)節(jié)的重力和浮力相抵消且浮心與重心重合。
浮力塊內(nèi)側(cè)根據(jù)關(guān)節(jié)外殼結(jié)構(gòu)進行賦形設(shè)計,外輪廓保證為圓柱形,避免影響機械臂的運動空間,如圖8 所示。

圖8 浮力配平后的關(guān)節(jié)實物Fig.8 Physical buoyancy balancing joint
4.3 防腐蝕技術(shù)
水下機械臂使用大量的金屬材料,在中性浮力水槽中長期浸泡容易產(chǎn)生腐蝕問題。 根據(jù)周雙珍等[11]的研究結(jié)果,中性浮力水槽中常發(fā)生的腐蝕現(xiàn)象主要包括:①2 種不同金屬接觸的邊線發(fā)生電偶腐蝕;②在金屬表面缺陷處發(fā)生點蝕;③在金屬與金屬、金屬與非金屬連接縫隙處發(fā)生縫隙腐蝕。
水下機械臂既需要盡可能模擬真實產(chǎn)品的結(jié)構(gòu)外形和功能,又要達到中性浮力配平的狀態(tài),接口較復(fù)雜,形狀不規(guī)整;零件的強度、剛度要足夠高,但又要避免太重而無法配平;還要考慮到試驗人員的安全和舒適性。 鑒于以上特點,水下機械臂的防腐蝕防護設(shè)計是一項復(fù)雜的綜合工作,包括原材料選擇、結(jié)構(gòu)設(shè)計、工藝等方面。
鈦及鈦合金在大氣和水溶液中很容易形成保護性極好的氧化膜,使其出現(xiàn)鈍化現(xiàn)象。 同時,鈦的鈍化膜又具有非常好的自愈性,當其鈍化膜遭到破壞時,能夠迅速修復(fù),彌合形成新的保護膜。鈦合金在無機金屬氯化物中沒有明顯的點腐蝕和應(yīng)力腐蝕開裂,無晶間腐蝕、點蝕、脫成分腐蝕等危害較大的局部腐蝕敏感性[12]。 水下機械臂關(guān)節(jié)殼體、臂桿等部分直接與水接觸,作為主要的承力結(jié)構(gòu)件對強度、剛度、重量均有較高要求,宜采用鈦合金材料,水下機械臂鈦合金關(guān)節(jié)外殼如圖9 所示。

圖9 鈦合金關(guān)節(jié)外殼Fig.9 Joint shell made by titanium alloy
緊固件材料選用雙相不銹鋼SAF2507,由于SAF2507 鉻和鉬的含量都很高,在含氯環(huán)境中,具有很高的耐腐蝕性能,同時還有良好的鈍化能力和耐微生物腐蝕性能。 對于水下基座、關(guān)節(jié)內(nèi)部零件等可以選擇316 L 不銹鋼或5A06 防銹鋁合金等材料。
水下機械臂采用合理的加工工藝和裝配工藝對于其防腐蝕性能也至關(guān)重要。 關(guān)節(jié)殼體、臂桿等需要焊接的鈦合金零件可采用等離子弧焊。 等離子弧焊能量集中,焊接穿透力強,可不填焊絲一次焊成,且易于保證均勻的背面焊透。 水下機械臂結(jié)構(gòu)與結(jié)構(gòu)之間、緊固件與安裝孔之間容易積存液體,因此總裝時要在貼合的整個表面按照工藝要求涂上密封膠,在密封膠的使用周期內(nèi)安裝好,以消除貼合面的間隙,避免電解液的殘留產(chǎn)生電化學(xué)腐蝕。
5 水下機械臂聯(lián)合試驗
水下機械臂設(shè)計臂長11.539 m,其工作空間覆蓋了空間站三艙構(gòu)型的所有作業(yè)點,滿足使用要求,如圖10 所示。 在開展聯(lián)合試驗前分別開展了出廠測試和預(yù)驗收測試,累計水下測試時間超過285 h,期間工作正常,滿足GB4208 IP68 密封性能要求。 經(jīng)過測試,水下機械臂末端位置精度優(yōu)于±4.5 cm,鎖定后末端持續(xù)(>60 s)承載能力不小于300 N,100 N 負載下變形量為100 ~135 mm,均滿足技術(shù)指標要求。
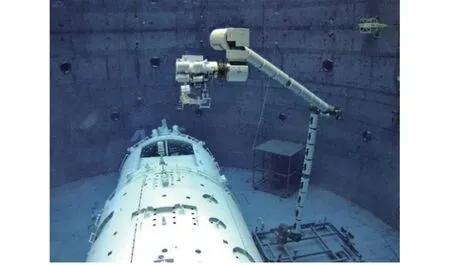
圖10 中性浮力水下機械臂實物Fig.10 Neutral buoyancy underwater manipulator
經(jīng)過關(guān)節(jié)性能測試、關(guān)節(jié)檢漏、整臂檢漏等部組件測試后,在航天員中心中性浮力水槽內(nèi)開展了機械臂與水槽試驗系統(tǒng)的聯(lián)合測試。
交付后,神舟十二號航天員乘組利用水下機械臂開展了出艙活動訓(xùn)練,如圖11 所示。 水下機械臂定點在空間站節(jié)點艙附近,支持航天員開展安裝腳限位器和艙外工作臺等出艙準備工作的訓(xùn)練。 之后航天員通過腳限位器站上水下機械臂,由水下機械臂將航天員運送到作業(yè)位置開展艙外作業(yè)支持訓(xùn)練,如圖12 所示。 水下機械臂在2020 年12 月至2021 年9 月期間參與水下試驗與訓(xùn)練任務(wù),連續(xù)水下停放超過226 天,滿足指標要求。
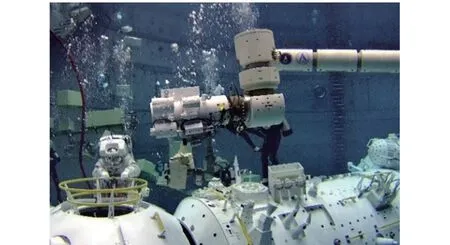
圖11 利用水下機械臂開展出艙訓(xùn)練Fig.11 EVA training using underwater manipulator
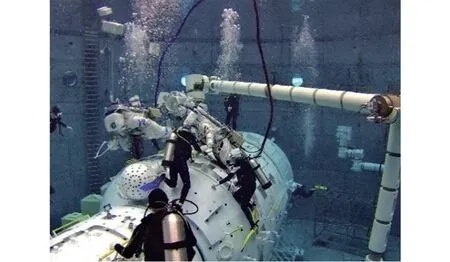
圖12 利用水下機械臂開展作業(yè)點訓(xùn)練Fig.12 Operation training using underwater manipulator
6 結(jié)論
1)對于采用電驅(qū)動的水下機械臂,以關(guān)節(jié)為基本單元,采用多重冗余密封手段,可以在10 m水深下產(chǎn)生較好的防護效果。 水下機械臂交付使用已超過2 年,最長在水下連續(xù)使用超過226 天,期間未發(fā)生漏水現(xiàn)象,關(guān)節(jié)性能滿足使用需求。
2)以關(guān)節(jié)為基本單元,采用浮力外殼與關(guān)節(jié)賦形設(shè)計進行浮力配平,可較好地解決機械臂重心始終處于變化狀態(tài)的配平問題,減少浮力塊對機械臂運動附加的干擾。
3)水下機械臂作為航天員在地面進行出艙活動試驗和訓(xùn)練的重要設(shè)備,在功能、性能、操作體驗等方面最大限度模擬真實機械臂產(chǎn)品,能夠幫助航天員感受、適應(yīng)并開展空間失重環(huán)境下站在機械臂末端的操作與活動訓(xùn)練,有效提升了空間站出艙活動水下試驗的質(zhì)量與有效性。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09