基于免疫粒子群的水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑模控制系統(tǒng)
2024-03-06 05:32:16張繼光丁正紅李騰飛
自動化與儀表 2024年2期
關(guān)鍵詞:系統(tǒng)
張繼光,丁正紅,李騰飛
(陜西省水電開發(fā)集團股份有限公司,西安 710065)
開發(fā)水力發(fā)電對于能源安全、水資源利用、環(huán)境保護等方面有著重要的意義[1]。水電站發(fā)電可通過改變水輪機速度達到對輸出功率的調(diào)整。傳統(tǒng)的控制器已經(jīng)滿足不了水輪機的非線性和負載的無規(guī)律變化,因此為了提高水輪機的控制效果,近年來,許多學(xué)者做了不少研究。如文獻[2]通過對PI 控制器采用模糊處理,提出了一種參數(shù)可以隨著水輪機轉(zhuǎn)速實時變化的滑模控制系統(tǒng),雖然可以控制水輪機調(diào)節(jié)系統(tǒng)的抖振問題,但是模糊控制的設(shè)計需要大量的經(jīng)驗,而且控制精度低;文獻[3]提出一種自適應(yīng)趨近率的滑模變結(jié)構(gòu)控制系統(tǒng),該系統(tǒng)適用于非線性系統(tǒng),可以屏蔽干擾,修正目標(biāo)軌道的跟蹤控制,從而達到控制需求。但是該系統(tǒng)存在參數(shù)配置不好,收斂速度慢的問題。
免疫粒子群算法具有魯棒性,適用復(fù)雜多變的求解問題,具有收斂速度快、全局尋優(yōu)能力強的特點。為此本文結(jié)合免疫粒子群算法以及動態(tài)滑膜控制,提出一種基于免疫粒子群的水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑模控制系統(tǒng),保障水輪機調(diào)節(jié)系統(tǒng)的靈活調(diào)度和安全穩(wěn)定運行,最大程度保障水力發(fā)電效果,促進清潔能源可持續(xù)發(fā)展。
1 水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑模控制系統(tǒng)
1.1 水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑模控制系統(tǒng)結(jié)構(gòu)
水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑模控制系統(tǒng)的框架圖如圖1 所示。
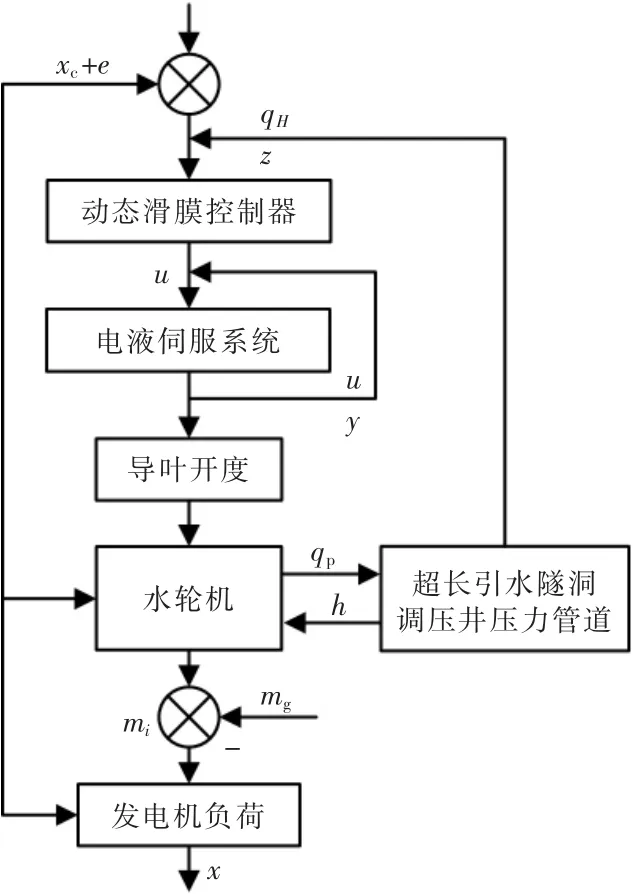
圖1 水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑膜控制系統(tǒng)框架圖Fig.1 Frame diagram of dynamic sliding film control system of hydraulic turbine governing system
該隧洞的動力學(xué)方程具有非線性,表達式為
式中:超長隧洞的水流慣性時間常數(shù)用TwH0描述;調(diào)壓室水位的變化幅度用z 來描述;水輪機的水頭損失用hH0描述;水頭用H0來表示;超長引水隧洞的流量用qH來描述。
調(diào)壓室的動力學(xué)方程表達式為
式中:壓力管道流量用qp表示;調(diào)壓室時間常數(shù)用TF表示。
水輪機力矩、流量的表達式為
式中:水輪機力矩的傳遞系數(shù)分別用eh、ex和ey表示;水輪機流量的傳遞系數(shù)分別用eqh、eqx和eqy表示;力矩偏差的相對值為mt;發(fā)電機轉(zhuǎn)速偏差的相對值為x;導(dǎo)葉開度的偏差相對值為y。
電液伺服機構(gòu)作為水輪機的主要驅(qū)動裝置,可以放大控制信號并驅(qū)動導(dǎo)葉機構(gòu)的運動。電液伺服機構(gòu)的動力學(xué)方程表達式為
式中:電液伺服機構(gòu)的時間常數(shù)用Ty描述;控制器輸出用u 來描述。
綜上所述,建立水輪機調(diào)節(jié)系統(tǒng)方程組表示為
水輪機調(diào)節(jié)系統(tǒng)的方程組轉(zhuǎn)換為標(biāo)準(zhǔn)形式來方便控制器的建立。n 階非線性動力系統(tǒng)的表達式為
式中:水輪機調(diào)節(jié)系統(tǒng)的狀態(tài)向量為X;n 維向量場為A(X)和B;有限控制輸出為u;輸出向量為Y。
通過式(6)能夠找到理想軌跡的控制律xd,達到動態(tài)滑膜控制下的水輪機調(diào)節(jié)系統(tǒng)按照理想軌跡進行輸出,目的是為了讓跟蹤誤差xd-x 無限趨近于0。
1.2 電液伺服系統(tǒng)
電液伺服系統(tǒng)通過液壓傳動原理創(chuàng)建的自動控制系統(tǒng)[4-5]。電液伺服系統(tǒng)具備輸出功率大、控制精度高等優(yōu)點,在工業(yè)生產(chǎn)的各個領(lǐng)域中廣泛應(yīng)用,可通過控制油缸位置,保障對水輪機狀態(tài)穩(wěn)定和精確調(diào)節(jié),并及時跟蹤和響應(yīng)系統(tǒng)狀態(tài)的變化。其中位移傳感器用于采集實際位置信號,轉(zhuǎn)換成電壓電流信號后,反饋至動態(tài)滑膜控制器,形成閉環(huán)結(jié)構(gòu)。電液伺服系統(tǒng)結(jié)構(gòu)如圖2 所示。
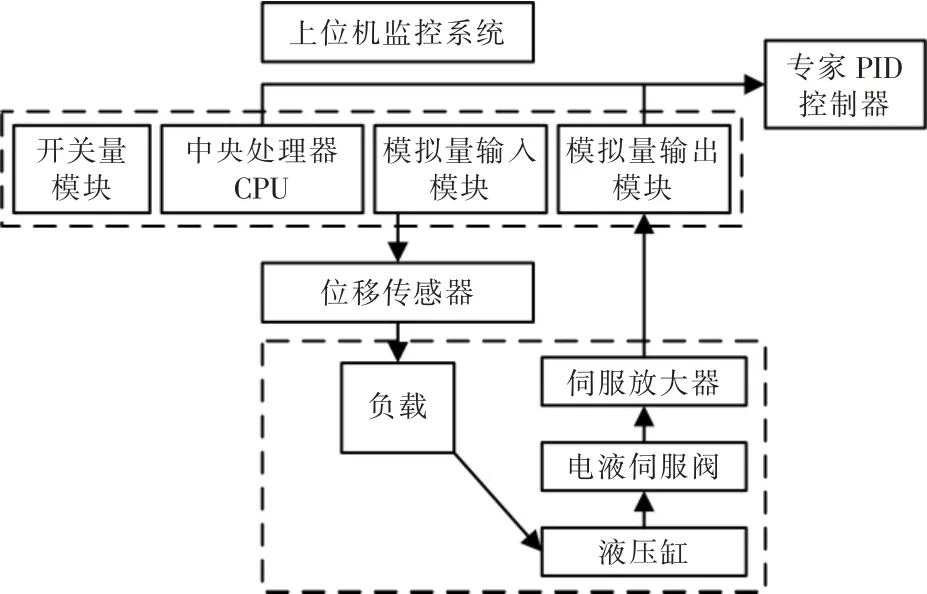
圖2 電液伺服系統(tǒng)框架圖Fig.2 Frame diagram of electro-hydraulic servo system
1.3 動態(tài)滑模控制器
在1.1 小節(jié)構(gòu)建水輪機調(diào)節(jié)系統(tǒng)狀態(tài)方程的基礎(chǔ)上,秉持水輪機調(diào)節(jié)系統(tǒng)的動態(tài)和穩(wěn)態(tài)運行目標(biāo),布局與調(diào)節(jié)系統(tǒng)控制變量維度一致的輸出方程,即:
式中:布局的輸出變量用w 來描述;輸出的加權(quán)矩陣表達式為C=[c1c2c3c4];輸出的積分項系數(shù)用k 描述;調(diào)速器永態(tài)轉(zhuǎn)差率用bp描述。
對控制系統(tǒng)動態(tài)性能的要求用Cx 表示,設(shè)Cj(j=1,2,3,4)分別對應(yīng)不同工況運行下的取值,系統(tǒng)運行過程中,水壓波動幅度小,與水壓相關(guān)的系數(shù)c3、c4通常取0;轉(zhuǎn)速加權(quán)系數(shù)用c1來描述,開度加權(quán)系數(shù)用c2來描述;進行構(gòu)建的輸出值全面考慮了水輪機調(diào)節(jié)過程中動態(tài)和靜態(tài)的要求。系統(tǒng)的動態(tài)輸出方程為
式中:動態(tài)滑模控制系統(tǒng)的不確定參數(shù)函數(shù)為f(x,θ)=CF(x,θ)+k(x1+bpx2);輸入系數(shù)為b=-CB∈R,b≠0的前提條件是當(dāng)c2≠0。
滑模控制是采用控制輸入的增加來解決系統(tǒng)不確定動態(tài)特征的方法[6]。為此,需要對不確定動態(tài)特性具有已知上界的要求。假設(shè)存在已知的且滿足條件的正定上界函數(shù)ρ(·),即:
通過采用具有滑模結(jié)構(gòu)的魯棒控制方案,可以有效處理系統(tǒng)中的未知動態(tài)特性,并獲得期望的控制性能。
根據(jù)水輪機調(diào)節(jié)系統(tǒng)在不同運行工況下的性能要求,可以設(shè)計一個參考模型。對于式(9)所描述的不確定參數(shù)系統(tǒng),其控制目標(biāo)是使系統(tǒng)的輸出w(t)跟蹤參考模型的輸出wd∈R。方便后續(xù)設(shè)計的跟蹤誤差定義為
基于根據(jù)誤差結(jié)果,建立動態(tài)方程,整理得到:
基于上述系統(tǒng)的動態(tài)方程,得到滑模控制器的輸出控制項表達式為
可通過控制項u 保障系統(tǒng)的輸出w(t)跟蹤參考模型的輸出wd∈R。式中,正反饋增益用ke∈R+表示,定義符號函數(shù)sgn(e)為
1.4 基于免疫粒子群算法的動態(tài)滑模控制器參數(shù)優(yōu)化
為進一步提升滑模控制器對水輪機調(diào)節(jié)系統(tǒng)控制效果,采用免疫粒子群優(yōu)化算法對系統(tǒng)滑模控制器的輸出控制項u 進行優(yōu)化[7]。通過優(yōu)化滑膜控制器的運行參數(shù),提高系統(tǒng)整體性能。結(jié)合免疫種群和粒子群優(yōu)化算法的方式,達到對動態(tài)滑模控制系統(tǒng)最佳參數(shù)尋找的目的[8-9]。免疫粒子群算法是將粒子群個體描述為滑模控制器的輸出控制項u 的可行解,將尋找最優(yōu)控制參數(shù)的過程模仿成粒子個體搜查的過程,是一種全局搜索的優(yōu)化算法。設(shè)置Q為免疫種群,g 為供水系統(tǒng)的關(guān)系因子。免疫粒子群對滑模控制器的輸出控制項進行優(yōu)化的適應(yīng)度計算公式如下:
通過對其賦值得到每個控制輸入值的適應(yīng)度,即:
式中:代表各免疫粒子的適應(yīng)度概率用Pi(qi)描述;δ 代表免疫記憶細胞;qi表示迭代次數(shù);N 代表粒子群規(guī)模;控制參數(shù)的適應(yīng)度和需求類型的選擇概率用Px描述,則有:
式中:控制參數(shù)u 的適應(yīng)度用f(qi)描述。
依據(jù)式(16)獲取適應(yīng)度最小的免疫粒子作為滑模控制器的輸出控制項u 的最優(yōu)解,完成水輪機調(diào)節(jié)系統(tǒng)的最佳控制。
2 實驗結(jié)果與分析
使用Octave 軟件搭建仿真實驗,深入研究本文設(shè)計水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑膜控制系統(tǒng)的應(yīng)用情況,水輪機調(diào)節(jié)系統(tǒng)的實驗參數(shù)設(shè)置如表1 所示。
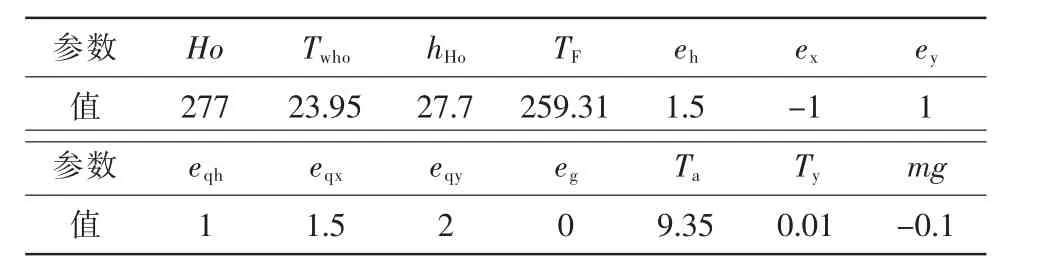
表1 水輪機調(diào)節(jié)系統(tǒng)參數(shù)Tab.1 Parameters of hydraulic turbine governing system
為驗證研究的水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑模控制系統(tǒng)的有效性和適配性,選擇鋸齒波信號和階躍信號作為系統(tǒng)的輸入,設(shè)定動態(tài)滑模控制器的跟蹤軌跡,并通過與傳統(tǒng)滑模控制器對比檢驗本文系統(tǒng)的有效性。兩種控制器的鋸齒波、階躍信號參數(shù)如表2和表3 所示。

表2 動態(tài)滑模控制器參數(shù)Tab.2 Parameters of dynamic sliding mode controller
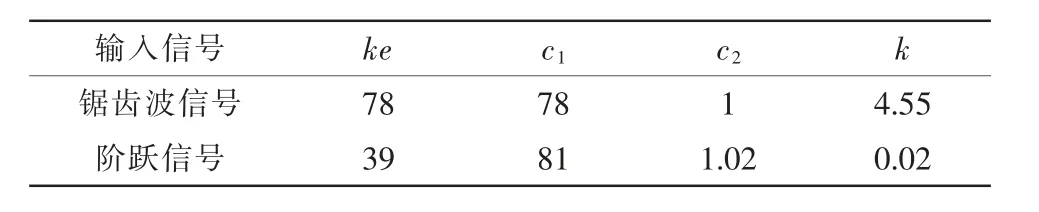
表3 傳統(tǒng)滑模控制器參數(shù)Tab.3 Parameters of traditional sliding mode controller
對水輪機調(diào)節(jié)系統(tǒng)的追蹤路線如圖3 所示。由圖3 可知,傳統(tǒng)的滑模控制器在兩種信號下的跟蹤軌跡有偏差,而設(shè)計的動態(tài)滑模控制器能夠保證水輪機調(diào)速裝置在選定的軌道上平穩(wěn)工作,同時在速度軌道跟蹤上動態(tài)反饋效果良好,并且不管是階躍還是鋸齒波,所設(shè)計的動態(tài)滑模控制器均具備魯棒性和強跟蹤能力。
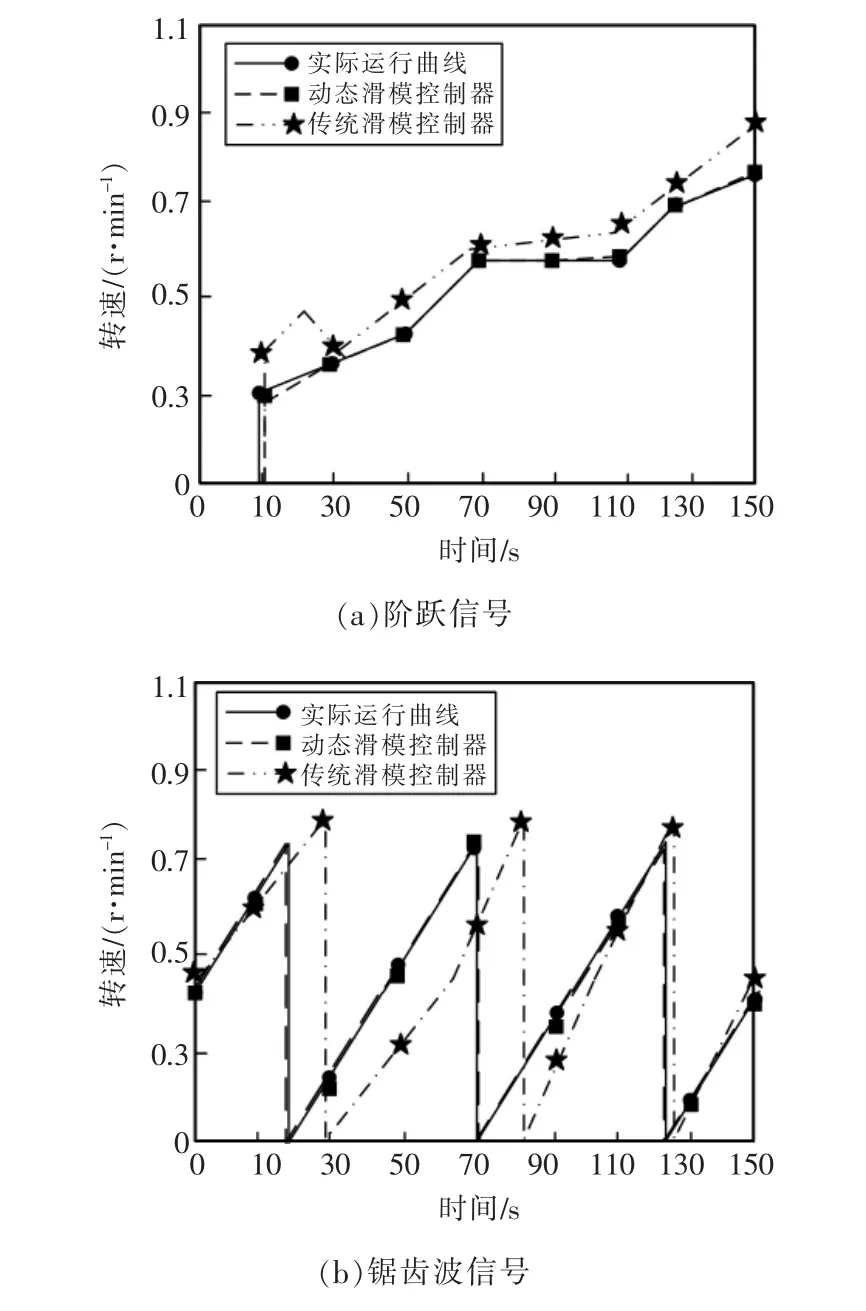
圖3 不同信號下動態(tài)滑模控制的軌跡跟蹤曲線Fig.3 Trajectory tracking curves of dynamic sliding mode control under different signals
為了分析比較研究所設(shè)計控制系統(tǒng)的動態(tài)滑模控制器和傳統(tǒng)滑模控制器對水輪機調(diào)節(jié)系統(tǒng)的控制性能,利用兩種控制器將水輪機穩(wěn)定在隨機的固定點,并采用兩種控制器來調(diào)整系統(tǒng)的響應(yīng)。在兩種信號下的轉(zhuǎn)速誤差情況如圖4 所示。由圖4(a)可知,在階躍信號下,兩種控制器的轉(zhuǎn)速在快穩(wěn)定之前,傳統(tǒng)滑模控制器抖振很嚴(yán)重,而且轉(zhuǎn)速誤差變化明顯。而研究的動態(tài)滑模控制器沒有出現(xiàn)明顯的抖振現(xiàn)象,轉(zhuǎn)速誤差幾乎為0,因此對水輪機調(diào)節(jié)系統(tǒng)的控制性起到了穩(wěn)定的作用。由圖4(b)可知,在鋸齒波信號下,兩種控制器的轉(zhuǎn)速在穩(wěn)定之后,傳統(tǒng)滑模控制器依然有連續(xù)的抖振現(xiàn)象,而研究的動態(tài)滑模控制器依然平穩(wěn),而且誤差幾乎為0。因此對動態(tài)滑模控制器的應(yīng)用可以控制水輪機調(diào)節(jié)系統(tǒng)穩(wěn)定運行,具有良好的動態(tài)響應(yīng)。
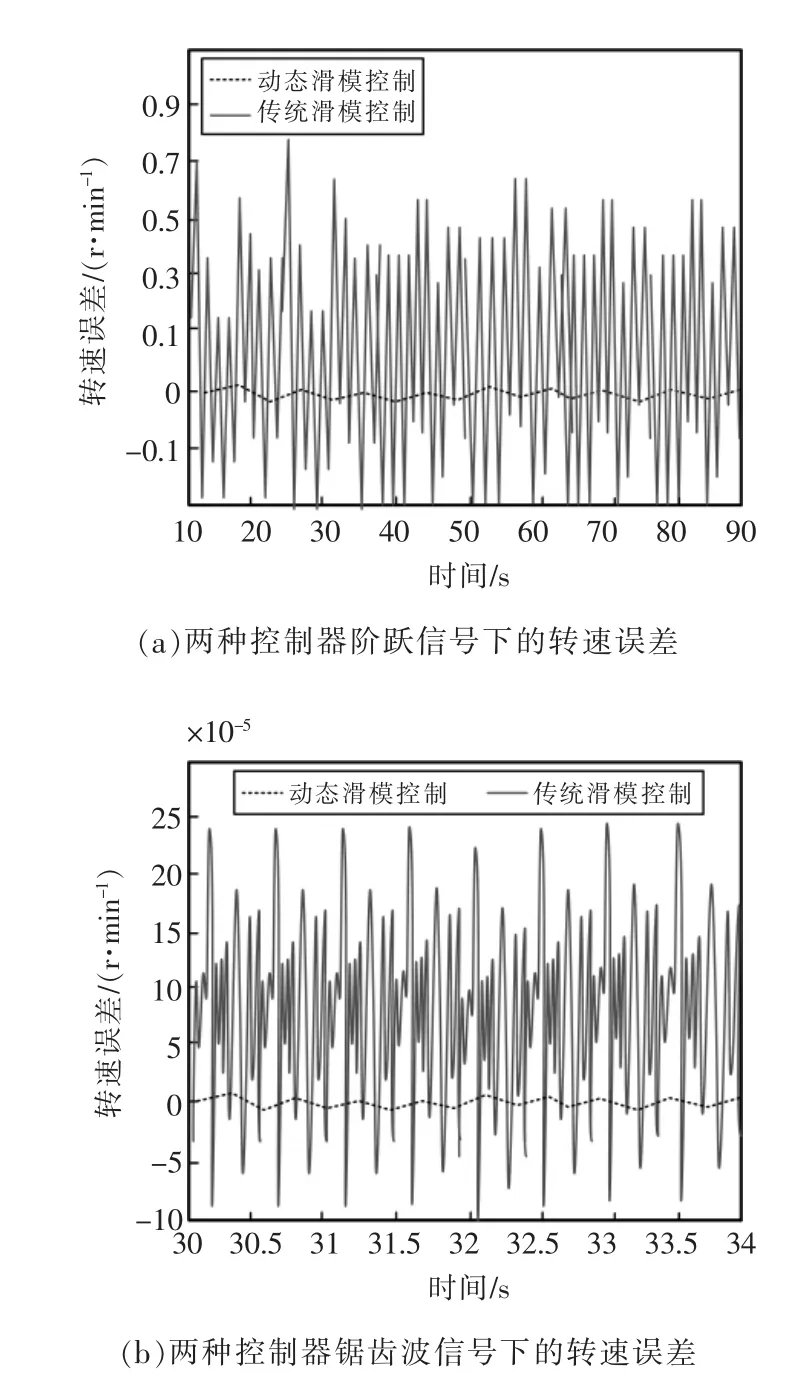
圖4 控制器在不同參考信號下的轉(zhuǎn)速誤差Fig.4 Speed error of controller under different reference signals
為了驗證免疫粒子群(IPSO)的性能,選取遺傳算法(GA)和混沌算法(CA)對水輪機調(diào)節(jié)系統(tǒng)動態(tài)滑模控制器進行參數(shù)優(yōu)化結(jié)果為對比。3 種算法的種群規(guī)模和最大迭代次數(shù)都相同。為了排除算法的隨機性,對3 種算法分別獨立運行100 次,統(tǒng)計結(jié)果得到最優(yōu)控制參數(shù)如表4 所示。由表4 可知,經(jīng)IPSO 算法得到的最優(yōu)值、平均值和標(biāo)準(zhǔn)差相較于GA 和CA 算法均有明顯降低,最優(yōu)適應(yīng)度值分別下降了2.12%和2.83%;平均適應(yīng)度值分別下降了3.34%和1.35%。研究選用的IPSO 的標(biāo)準(zhǔn)差僅為0.0086,明顯低于其他兩種算法。因此,基于免疫粒子群優(yōu)化的動態(tài)滑模控制器具有參數(shù)精度較高和穩(wěn)定性好的優(yōu)勢。

表4 三種算法參數(shù)優(yōu)化的統(tǒng)計結(jié)果Tab.4 Statistical results of parameter optimization of three algorithms
為了更加直觀的比較,對3 種算法進行100 次獨立計算得到最優(yōu)適應(yīng)度值,3 種算法收斂曲線如圖5 所示。由圖5 可知,GA 算法擁有較好的初始解,但是IPSO 算法的收斂速度明顯快于其他兩種算法,在13 代左右就已完成收斂,而GA 和CA 算法分別在21 和32 左右才成功收斂。實驗結(jié)果表明,研究的免疫粒子群算法對動態(tài)滑模控制器參數(shù)的尋優(yōu)能力優(yōu)于GA 和CA 算法,效率更高,能夠為水輪機調(diào)節(jié)系統(tǒng)的動態(tài)滑模控制器提供更優(yōu)的參數(shù)選取方案。

圖5 最優(yōu)適應(yīng)度值收斂曲線Fig.5 Convergence curve of optimal fitness value
3 結(jié)語
研究的基于免疫粒子群動態(tài)滑模控制系統(tǒng),用于水輪機調(diào)節(jié)系統(tǒng)的精確跟蹤控制。對研究的控制系統(tǒng)的實際應(yīng)用效果進行相關(guān)數(shù)據(jù)分析,并確定免疫粒子群擁有計算精度高和收斂速率快的優(yōu)勢,為水輪機的控制系統(tǒng)提出更優(yōu)的參數(shù)選取;同時,對動態(tài)滑模控制系統(tǒng)的研究比一般的滑模控制器有著更好的特性,該系統(tǒng)研究了在不同條件下都能夠正確跟蹤,并能夠正確處理滑模的抖振問題,從而改善了水輪機調(diào)節(jié)系統(tǒng)的控制特性,具有高魯棒性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32