北斗三號(hào)系統(tǒng)衛(wèi)星自主完好性監(jiān)測(cè)技術(shù)
2024-03-05 11:14:10高為廣蔡洪亮戴永珊胡旖旎
導(dǎo)航定位與授時(shí) 2024年1期
陳 雷, 裴 凌, 高為廣, 蔡洪亮, 戴永珊, 陳 穎, 胡旖旎
(1. 北京跟蹤與通信技術(shù)研究所,北京 100094;2. 智慧地球重點(diǎn)實(shí)驗(yàn)室,北京 100094;3. 上海交通大學(xué)上海市導(dǎo)航與位置服務(wù)重點(diǎn)實(shí)驗(yàn)室,上海 200240;4. 上海微小衛(wèi)星工程中心,上海 201304)
0 引言
隨著衛(wèi)星導(dǎo)航系統(tǒng)應(yīng)用范圍越來(lái)越廣,導(dǎo)航用戶對(duì)衛(wèi)星導(dǎo)航系統(tǒng)的完好性要求也越來(lái)越高,需要系統(tǒng)提供當(dāng)前服務(wù)的精度等級(jí),且在導(dǎo)航系統(tǒng)發(fā)生異常時(shí),能夠快速向用戶提供告警信息,以保證導(dǎo)航用戶的使用安全[1]。衛(wèi)星導(dǎo)航服務(wù)在生命安全領(lǐng)域應(yīng)用時(shí)對(duì)性能提出了精度、完好性、連續(xù)性和可用性4個(gè)衡量指標(biāo)。其中,完好性是誤差超限時(shí)的及時(shí)告警能力,根據(jù)霍普金斯大學(xué)的分析報(bào)告《GPS RISK》,將完好性故障風(fēng)險(xiǎn)主要分類為:衛(wèi)星段故障、傳播異常及非敵意干擾等。根據(jù)不同完好性故障風(fēng)險(xiǎn)發(fā)生概率和故障特征,提出了空基增強(qiáng)、陸基增強(qiáng)和星基增強(qiáng)技術(shù),成功地將全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)應(yīng)用到民航、鐵路、自動(dòng)駕駛等領(lǐng)域[2-4]。
目前,北斗三號(hào)系統(tǒng)定位精度逐漸接近1 m級(jí),已能滿足大部分用戶對(duì)精度的需求[5-6]。與之相比,決定用戶安全性能的完好性問(wèn)題變得日益突出。從用戶安全的角度考慮,尤其是對(duì)于生命安全服務(wù),衛(wèi)星導(dǎo)航系統(tǒng)的完好性具有極其重要的地位。對(duì)于不同用戶類型,系統(tǒng)應(yīng)給出更加詳細(xì)具體的告警門限和完好性風(fēng)險(xiǎn)需求,要求在盡量節(jié)省系統(tǒng)資源的前提下提供更短時(shí)間和更小風(fēng)險(xiǎn)的完好性服務(wù),同時(shí)也兼顧完好性風(fēng)險(xiǎn)概率與可用性、連續(xù)性之間的協(xié)調(diào)一致性[7-9]。
完好性監(jiān)測(cè)技術(shù)從實(shí)現(xiàn)載體的角度,通常可以分為三類:接收機(jī)自主完好性監(jiān)測(cè)(receiver autonomous integrity monitoring,RAIM)技術(shù)、衛(wèi)星自主完好性監(jiān)測(cè)(satellite autonomous integrity monitoring,SAIM)技術(shù)和系統(tǒng)地面完好性通道(ground integrity channel,GIC),一般以告警限值、告警時(shí)間和完好性風(fēng)險(xiǎn)概率共3項(xiàng)具體指標(biāo)表征。北斗衛(wèi)星導(dǎo)航系統(tǒng)由地球靜止軌道(geostationary orbit, GEO)衛(wèi)星、傾斜地球同步軌道(inclined geosynchronous orbit,IGSO)衛(wèi)星、中圓軌道(medium Earth orbit,MEO)衛(wèi)星混合星座組成[10],區(qū)域監(jiān)測(cè)網(wǎng)[11]對(duì)移動(dòng)衛(wèi)星尤其是MEO衛(wèi)星可監(jiān)測(cè)弧段非常短,若僅依靠地面GIC進(jìn)行監(jiān)測(cè),難以滿足全球范圍對(duì)快變誤差的監(jiān)測(cè)告警需求。為彌補(bǔ)地面區(qū)域監(jiān)測(cè)網(wǎng)覆蓋不足,提升系統(tǒng)完好性服務(wù)能力,北斗三號(hào)系統(tǒng)在全球范圍內(nèi),首次工程化實(shí)現(xiàn)了SAIM功能,通過(guò)SAIM與GIC聯(lián)合,提升了系統(tǒng)基本完好性服務(wù)能力,SAIM技術(shù)的優(yōu)勢(shì)是告警時(shí)間最短,難點(diǎn)在于對(duì)星上、星間鏈路資源要求高[12-14],監(jiān)測(cè)算法由于不是第三方監(jiān)測(cè),相較于地面完好性監(jiān)測(cè)更為復(fù)雜,是完好性監(jiān)測(cè)技術(shù)發(fā)展的前沿趨勢(shì),GPS III和Galileo等國(guó)外衛(wèi)星導(dǎo)航系統(tǒng)均競(jìng)相發(fā)展。
本文介紹了北斗三號(hào)系統(tǒng)SAIM技術(shù)的功能設(shè)計(jì)、實(shí)現(xiàn)原理及后續(xù)發(fā)展建議,可為我國(guó)更好地提升和發(fā)展完好性監(jiān)測(cè)能力提供參考。
1 北斗三號(hào)SAIM技術(shù)體制
SAIM技術(shù)[15],是指在衛(wèi)星上自主完成完好性監(jiān)測(cè),導(dǎo)航衛(wèi)星自身對(duì)所播發(fā)的導(dǎo)航信號(hào)通過(guò)多路直接反饋處理,進(jìn)行調(diào)制信號(hào)、導(dǎo)航電文數(shù)據(jù)和衛(wèi)星鐘等狀態(tài)的監(jiān)測(cè)處理,形成相應(yīng)的完好性信息隨導(dǎo)航電文播發(fā)給用戶。作為一種全新的完好性監(jiān)測(cè)手段,由于不受傳播路徑誤差影響,完好性監(jiān)測(cè)處理方法簡(jiǎn)單,告警實(shí)時(shí)性高,是GNSS衛(wèi)星導(dǎo)航系統(tǒng)完好性技術(shù)升級(jí)的重要內(nèi)容之一[16]。SAIM技術(shù)的主要難點(diǎn)在于星載監(jiān)測(cè)設(shè)備的設(shè)計(jì)與實(shí)現(xiàn),GPS將在GPS III系統(tǒng)中實(shí)現(xiàn)SAIM[17-18],而北斗三號(hào)系統(tǒng)則是首次實(shí)現(xiàn)SAIM技術(shù)的全球衛(wèi)星導(dǎo)航系統(tǒng)。
1.1 功能設(shè)計(jì)
由于北斗衛(wèi)星導(dǎo)航區(qū)域監(jiān)測(cè)網(wǎng)對(duì)衛(wèi)星的覆蓋局限,對(duì)傳統(tǒng)的地面完好性監(jiān)測(cè)提出了挑戰(zhàn)。北斗衛(wèi)星導(dǎo)航系統(tǒng)由GEO/IGSO/MEO混合星座組成,圖1給出了北斗地面控制系統(tǒng)監(jiān)測(cè)網(wǎng)對(duì)衛(wèi)星的覆蓋深度,其中白色為衛(wèi)星星下點(diǎn)軌跡,從圖中可以看出,地面監(jiān)測(cè)網(wǎng)對(duì)移動(dòng)衛(wèi)星尤其是MEO衛(wèi)星可監(jiān)測(cè)弧段非常短,僅依靠地基完好性監(jiān)測(cè),難以保證全球范圍對(duì)快變誤差的監(jiān)測(cè)告警需求。

(a) MEO衛(wèi)星
北斗三號(hào)系統(tǒng)SAIM事件及告警手段如圖2所示,主要對(duì)導(dǎo)航信號(hào)異常和衛(wèi)星鐘異常進(jìn)行在軌監(jiān)測(cè),其中導(dǎo)航信號(hào)異常主要包括功率跳變、偽距跳變、相關(guān)峰畸變及碼載波偏離等,但實(shí)際在軌相關(guān)峰畸變和碼載波偏離異常暫未參與實(shí)際告警;衛(wèi)星鐘異常包括衛(wèi)星鐘頻率異常和衛(wèi)星鐘相位異常,均參與實(shí)際告警。告警手段主要包括導(dǎo)航信號(hào)切非標(biāo)準(zhǔn)碼和對(duì)衛(wèi)星健康狀態(tài)置不可用兩種手段。

圖2 北斗三號(hào)SAIM事件及告警手段示意圖
1.2 實(shí)現(xiàn)原理
北斗三號(hào)SAIM載荷設(shè)計(jì)主要包括兩個(gè)部分:一是星上時(shí)頻穩(wěn)定性監(jiān)測(cè),即監(jiān)測(cè)星上時(shí)鐘的突變;二是星上信號(hào)質(zhì)量監(jiān)測(cè),包括偽距相位監(jiān)測(cè)、信號(hào)功率監(jiān)測(cè)、信號(hào)畸變監(jiān)測(cè)和碼相位一致性監(jiān)測(cè)。北斗SAIM設(shè)計(jì)流程如圖3所示。
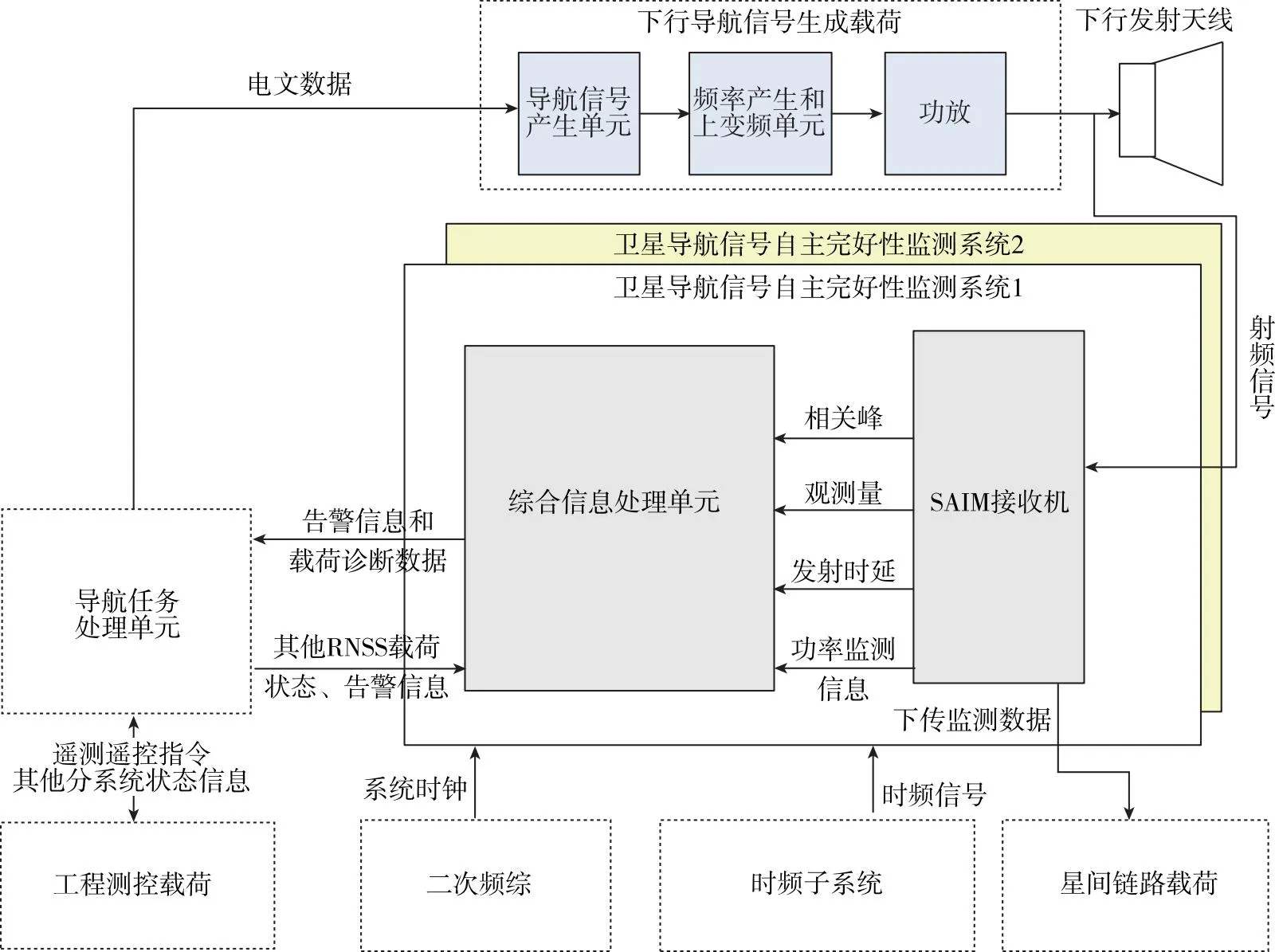
圖3 SAIM實(shí)現(xiàn)原理
星上時(shí)頻穩(wěn)定性監(jiān)測(cè),利用星載原子鐘產(chǎn)生參考?xì)v元,同時(shí)輸出頻率通過(guò)歷元發(fā)生器產(chǎn)生一個(gè)歷元。利用晶振頻率填充參考?xì)v元和輸出頻率產(chǎn)生的歷元,再通過(guò)相位量尺比較相位誤差,相位誤差經(jīng)過(guò)環(huán)路濾波器后進(jìn)行星載原子鐘的完好性監(jiān)測(cè)。這樣的設(shè)計(jì)充分利用原子鐘長(zhǎng)期穩(wěn)定度好、晶振短期穩(wěn)定度好的優(yōu)點(diǎn),并利用環(huán)路濾波器減小相位量尺噪聲的影響,保障了衛(wèi)星自主完好性可以準(zhǔn)確監(jiān)測(cè)到時(shí)鐘跳變。
星上利用獨(dú)立信號(hào)監(jiān)測(cè)接收機(jī)接收衛(wèi)星所發(fā)射的各個(gè)導(dǎo)航信號(hào)和數(shù)據(jù),獲取信號(hào)的相關(guān)峰數(shù)據(jù)和原始測(cè)量數(shù)據(jù)等信息,接收機(jī)內(nèi)部通過(guò)對(duì)相關(guān)峰數(shù)據(jù)分析信號(hào)質(zhì)量,監(jiān)測(cè)可能的信號(hào)畸變異常現(xiàn)象,然后利用接收機(jī)載波和偽碼測(cè)量數(shù)據(jù)檢查載波與碼相位一致性、利用信噪比檢查信號(hào)功率異常,完成星上信號(hào)質(zhì)量監(jiān)測(cè)。自主完好性監(jiān)測(cè)北斗三號(hào)衛(wèi)星的3個(gè)新體制信號(hào)B1C、B2a和B3A,3種信號(hào)的調(diào)制和服務(wù)方式列于表1。
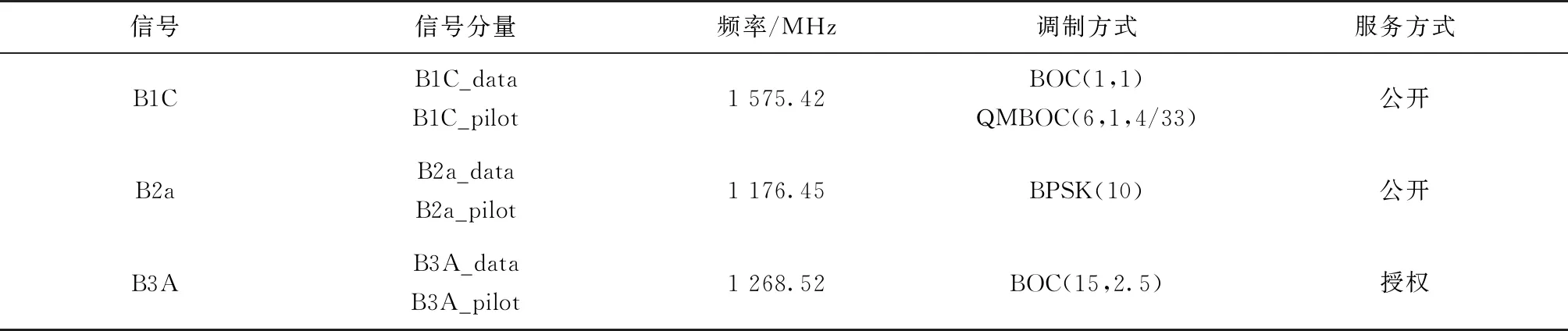
表1 北斗三號(hào)衛(wèi)星下行信號(hào)調(diào)制與服務(wù)方式
北斗SAIM采取兩種方式標(biāo)識(shí)信號(hào)狀態(tài),當(dāng)監(jiān)測(cè)到異常時(shí),一種方式通過(guò)電文進(jìn)行告警,將電文參數(shù)SIF置為“1”;一種方式是將偽碼由標(biāo)準(zhǔn)碼調(diào)制為非標(biāo)準(zhǔn)碼。但是衛(wèi)星自主完好性不能獨(dú)立完成告警退出,需要地面完好性監(jiān)測(cè)確認(rèn)信號(hào)恢復(fù)正常后,由地面發(fā)射信號(hào)狀態(tài)恢復(fù)指令,才能退出衛(wèi)星自主完好性告警狀態(tài)。
通過(guò)上述設(shè)計(jì),當(dāng)衛(wèi)星出現(xiàn)信號(hào)畸變、功率低于最小發(fā)射功率或衛(wèi)星鐘跳變大于3 ns時(shí),衛(wèi)星自主完好性可以給出秒級(jí)告警。SAIM單機(jī)通過(guò)主備全開的“雙工”模式,能夠有效降低監(jiān)測(cè)虛警,主份和備份獨(dú)立監(jiān)測(cè)衛(wèi)星鐘、導(dǎo)航信號(hào)及導(dǎo)航電文異常狀態(tài),僅在主備份均出現(xiàn)異常時(shí)才發(fā)出告警標(biāo)識(shí)。
2 在軌運(yùn)行分析
北斗三號(hào)系統(tǒng)首次在實(shí)際在軌衛(wèi)星上工程化實(shí)現(xiàn)了SAIM技術(shù)[19-20]。雖然前期在系統(tǒng)的服務(wù)性能監(jiān)測(cè)評(píng)估中,對(duì)SAIM數(shù)據(jù)的正確性進(jìn)行過(guò)驗(yàn)證,但對(duì)于其監(jiān)測(cè)數(shù)據(jù)的分布特性尚無(wú)系統(tǒng)性分析。理論上,SAIM數(shù)據(jù)在衛(wèi)星正常運(yùn)行服務(wù)期間,應(yīng)圍繞某一均值,附加高斯白噪聲,即理論服從正態(tài)分布。但考慮到實(shí)際在軌衛(wèi)星所處空間環(huán)境較為復(fù)雜,且監(jiān)測(cè)數(shù)據(jù)受單機(jī)工作狀態(tài)、溫度及不同研制單位產(chǎn)品特性等多種不確定因素影響[21],其實(shí)際在軌的正態(tài)分布特性服從程度和長(zhǎng)期穩(wěn)定性等問(wèn)題需利用長(zhǎng)期在軌實(shí)際連續(xù)監(jiān)測(cè)數(shù)據(jù),開展系統(tǒng)性、全星座的深入研究。
本文隨機(jī)選取某一顆MEO衛(wèi)星自2020年7月31日北斗三號(hào)系統(tǒng)正式開通服務(wù)以來(lái)至2021年7月31日連續(xù)1年期間的監(jiān)測(cè)數(shù)據(jù),得到工程化應(yīng)用的SAIM數(shù)據(jù)分布特性,以驗(yàn)證其監(jiān)測(cè)數(shù)據(jù)實(shí)際在軌分布特性。
2.1 導(dǎo)航下行信號(hào)功率監(jiān)測(cè)
2.1.1 監(jiān)測(cè)方法
在下行導(dǎo)航天線前端,通過(guò)耦合得到小功率信號(hào)作為完好性監(jiān)測(cè)接收機(jī)的輸入端。輸入信號(hào)經(jīng)過(guò)數(shù)字采樣量化后,經(jīng)過(guò)混頻、濾波、抽取及量化后輸出。
根據(jù)信號(hào)處理模塊采集到的功率監(jiān)測(cè)信息,從衛(wèi)星信號(hào)的功率方面監(jiān)測(cè)和評(píng)估導(dǎo)航信號(hào)質(zhì)量。正常情況下,星上監(jiān)測(cè)的信號(hào)功率圍繞均值在一定范圍內(nèi)波動(dòng),一旦導(dǎo)航信號(hào)功率下降超過(guò)告警閾值,SAIM給出告警信息。在衛(wèi)星發(fā)射之前,SAIM的告警閾值采用經(jīng)驗(yàn)初始值。在信號(hào)正常情況下,星上信號(hào)功率監(jiān)測(cè)數(shù)據(jù)應(yīng)該具有較高的穩(wěn)定性,通過(guò)對(duì)實(shí)際數(shù)據(jù)標(biāo)準(zhǔn)偏差和分布特性進(jìn)行分析,設(shè)計(jì)合理的星上告警閾值,對(duì)星上告警門限進(jìn)行重構(gòu)。
2.1.2 在軌監(jiān)測(cè)數(shù)據(jù)統(tǒng)計(jì)
圖4給出了北斗三號(hào)PRN C19衛(wèi)星全年的功率監(jiān)測(cè)時(shí)間序列。其中,圖4(a)為B1C信號(hào)功率監(jiān)測(cè)值,圖4(b)為監(jiān)測(cè)值的Q-Q圖,圖中紅色線為正態(tài)分布參考線,藍(lán)色線為功率監(jiān)測(cè)數(shù)據(jù)的分布曲線。藍(lán)色線越接近紅色線,表明監(jiān)測(cè)數(shù)據(jù)越接近正態(tài)分布,橫坐標(biāo)單位為d。
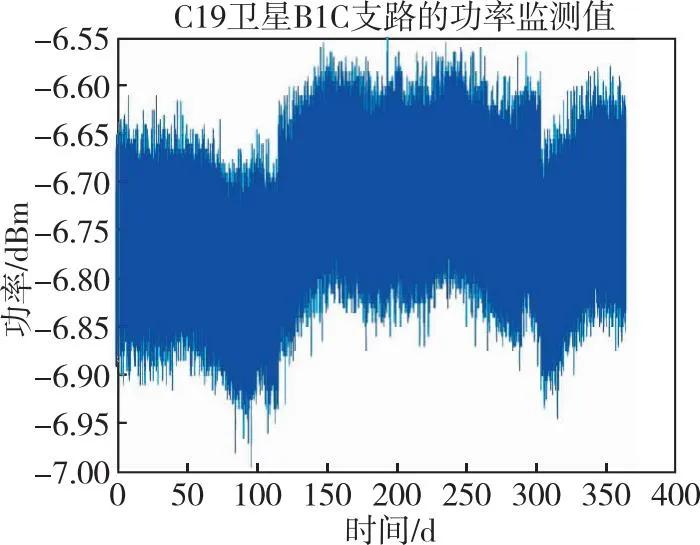
(a) 原始監(jiān)測(cè)數(shù)據(jù)
2.2 偽距測(cè)量監(jiān)測(cè)
2.2.1 監(jiān)測(cè)方法
星上載荷故障或指令異常可能引起用戶觀測(cè)的偽距異常跳變。利用星上接收機(jī)對(duì)偽距觀測(cè)值進(jìn)行監(jiān)測(cè),由于星上接收機(jī)和衛(wèi)星鐘采用了不同的頻率源,星上偽距測(cè)量存在線性漂移,通過(guò)在信號(hào)時(shí)延測(cè)量過(guò)程中進(jìn)行鐘差補(bǔ)償,使星上監(jiān)測(cè)接收機(jī)的偽距圍繞均值在一定范圍內(nèi)波動(dòng)。
星上偽距計(jì)算方式是通過(guò)測(cè)量本地時(shí)間和信號(hào)時(shí)間來(lái)計(jì)算偽距的,由于下行信號(hào)延遲較小且延遲相對(duì)固定,因此信號(hào)時(shí)間只需要計(jì)算碼片計(jì)數(shù)和碼相位,無(wú)需解整周模糊[22-23]。
Pr=tsignal-tlocal
(1)
tsignal=Cntchip/Rchip+ Phasecode*216/Rchip
(2)
tlocal=Cnt20 ms×0.02+Cnt10.23/10.23×106+
Clkphase*216/10.23×106
(3)
式中,Cntchip是碼片計(jì)數(shù);Rchip是碼速率;Phasecode是碼相位;216是由于碼數(shù)字振蕩器(numerically controlled oscillator, NCO)采用16位實(shí)現(xiàn);Cnt20 ms是20 ms計(jì)數(shù);Cnt10.23是10.23 M計(jì)數(shù);Clkphase是10.23 M碼相位。如果某路導(dǎo)航信號(hào)的偽距發(fā)現(xiàn)異常跳變,且超過(guò)告警閾值,則給出該路信號(hào)的告警信息。
2.2.2 在軌監(jiān)測(cè)數(shù)據(jù)統(tǒng)計(jì)
圖5給出了北斗三號(hào)PRN C19衛(wèi)星全年時(shí)間的偽距監(jiān)測(cè)時(shí)間序列。其中,圖5(a)為B1C偽距測(cè)量監(jiān)測(cè)值,圖5(b)為監(jiān)測(cè)值的Q-Q圖,圖中紅色線為正態(tài)分布參考線,藍(lán)色線為偽距測(cè)量監(jiān)測(cè)數(shù)據(jù)的分布曲線。藍(lán)色線越接近紅色線,表明監(jiān)測(cè)數(shù)據(jù)越接近正態(tài)分布,橫坐標(biāo)單位為d。

(a) 原始監(jiān)測(cè)數(shù)據(jù)
2.3 衛(wèi)星原子鐘相位和頻率監(jiān)測(cè)
2.3.1 監(jiān)測(cè)方法
星鐘頻率的輸出信號(hào)可以表示為
V(t)=[V0+ε(t)]sin[2πf0t+φ(t)]
(4)
式中,V0為標(biāo)稱振幅;ε(t)為振幅的起伏;f0為標(biāo)稱頻率或長(zhǎng)期平均頻率;φ(t)為相位偏差;由式(4)可知,信號(hào)的瞬時(shí)相位為
φ(t)=2πf0t+φ(t)
(5)
而瞬時(shí)頻率是相位的時(shí)間導(dǎo)數(shù),即
(6)
于是,瞬時(shí)頻率為
(7)
瞬時(shí)相對(duì)頻率偏差為
(8)
由式(8)可知,對(duì)于星鐘,主要監(jiān)測(cè)φ(t)項(xiàng)。星鐘跳頻、跳相的監(jiān)測(cè)是通過(guò)鎖相環(huán)實(shí)現(xiàn)的,即一個(gè)環(huán)路相位跟蹤系統(tǒng),它通過(guò)負(fù)反饋來(lái)對(duì)本地信號(hào)的頻率和相位進(jìn)行調(diào)節(jié),以實(shí)現(xiàn)對(duì)參考信號(hào)的跟蹤。若衛(wèi)星鐘相位或頻率異常跳變超過(guò)預(yù)設(shè)的告警門限,則所有信號(hào)均進(jìn)行告警。通過(guò)對(duì)相鄰歷元鐘差測(cè)量值進(jìn)行二次差分,消除衛(wèi)星鐘與本地參考晶振的頻差引入的相位偏移,可以對(duì)衛(wèi)星鐘相位跳變進(jìn)行監(jiān)測(cè)。衛(wèi)星鐘頻率跳變可由相位跳變導(dǎo)出。
2.3.2 在軌監(jiān)測(cè)數(shù)據(jù)統(tǒng)計(jì)
由于衛(wèi)星鐘頻率跳變可由相位跳變導(dǎo)出,即頻率監(jiān)測(cè)值和相位監(jiān)測(cè)值有著一致的分布特性,因此本文中在軌監(jiān)測(cè)數(shù)據(jù)分布特性選取相位監(jiān)測(cè)值作為分析。
圖6給出了北斗三號(hào)PRN C19衛(wèi)星全年時(shí)間的相位監(jiān)測(cè)時(shí)間序列。其中,圖6(a)為相位監(jiān)測(cè)值,圖6(b)為監(jiān)測(cè)值的Q-Q圖,圖中紅色線為正態(tài)分布參考線,藍(lán)色線為相位監(jiān)測(cè)數(shù)據(jù)的分布曲線。藍(lán)色線越接近紅色線,表明監(jiān)測(cè)數(shù)據(jù)越接近正態(tài)分布,橫坐標(biāo)單位為d。
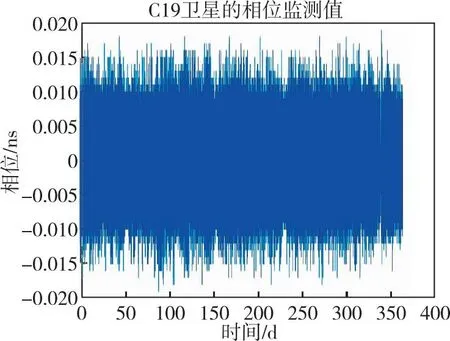
(a) 原始監(jiān)測(cè)數(shù)據(jù)
通過(guò)隨機(jī)選取某一顆衛(wèi)星對(duì)衛(wèi)星自主完好性在軌監(jiān)測(cè)數(shù)據(jù)中的功率監(jiān)測(cè)、偽距測(cè)量監(jiān)測(cè)、衛(wèi)星原子鐘相位和頻率監(jiān)測(cè)結(jié)果按照時(shí)間序列繪制Q-Q圖,綜合表2所示的統(tǒng)計(jì)數(shù)據(jù),可以得到以下結(jié)論:

表2 北斗三號(hào)衛(wèi)星下行信號(hào)調(diào)制與服務(wù)方式
1)導(dǎo)航下行信號(hào)功率監(jiān)測(cè)和偽距測(cè)量監(jiān)測(cè)結(jié)果基本符合正態(tài)分布特性;
2)衛(wèi)星鐘頻率和相位監(jiān)測(cè)值整體上看均有較高穩(wěn)定性,偏度絕對(duì)值均小于0.5,近似正態(tài)分布;
3)SAIM數(shù)據(jù)在長(zhǎng)時(shí)間段下呈現(xiàn)出細(xì)微分段現(xiàn)象,主要是受空間環(huán)境、衛(wèi)星工作狀態(tài)影響,導(dǎo)致監(jiān)測(cè)結(jié)果長(zhǎng)期特性存在細(xì)微分段,但整體依然滿足正態(tài)分布。
3 未來(lái)研究與發(fā)展方向
由于北斗三號(hào)系統(tǒng)是首個(gè)工程化實(shí)現(xiàn)SAIM技術(shù)手段的GNSS,相關(guān)SAIM的參數(shù)處理算法和相應(yīng)的用戶使用算法都沒(méi)有成熟的理論方案可供參考,因此在后續(xù)發(fā)展方面,仍有較大提升優(yōu)化空間。本文結(jié)合SAIM在軌實(shí)際運(yùn)行狀態(tài),針對(duì)性提出后續(xù)研究與發(fā)展方向。
3.1 告警門限動(dòng)態(tài)優(yōu)化
北斗三號(hào) SAIM 告警門限與地面完好性監(jiān)測(cè)告警門限是獨(dú)立設(shè)計(jì),SAIM告警門限設(shè)置比目前地面完好性監(jiān)測(cè)告警門限值更為嚴(yán)苛,星地告警門限值相互之間并無(wú)匹配映射關(guān)系,存在 SAIM 監(jiān)測(cè)告警、但地面完好性監(jiān)測(cè)由于未達(dá)到告警門限而不告警問(wèn)題,對(duì)用戶應(yīng)用造成困擾。
SAIM告警門限包括時(shí)延監(jiān)測(cè)告警門限、功率監(jiān)測(cè)告警門限、衛(wèi)星鐘相位跳變監(jiān)測(cè)告警門限和衛(wèi)星鐘頻率跳變監(jiān)測(cè)告警門限,這些告警門限均是衛(wèi)星上天之前,主要依據(jù)地面測(cè)試仿真情況設(shè)計(jì)的。目前北斗三號(hào)系統(tǒng)已正式開通服務(wù)2年多,部分衛(wèi)星在軌運(yùn)行最長(zhǎng)已4年有余,已經(jīng)積累了大量SAIM數(shù)據(jù),應(yīng)根據(jù)在軌監(jiān)測(cè)數(shù)據(jù)長(zhǎng)期變化特征及分布特性、系統(tǒng)服務(wù)指標(biāo)要求,結(jié)合故障診斷和用戶告警等多種完好性監(jiān)測(cè)需求,開展告警門限優(yōu)化設(shè)計(jì),滿足實(shí)際應(yīng)用要求,從而優(yōu)化系統(tǒng)服務(wù)的完好性、連續(xù)性和可用性。
3.2 分級(jí)告警策略設(shè)計(jì)
現(xiàn)行的告警策略,無(wú)論是SAIM還是地面,都是只要一觸發(fā)告警門限就會(huì)告警。目前地面告警,以判斷空間信號(hào)測(cè)距誤差(signal-in-space range error, SISRE)為主,目的是確保用戶的測(cè)距精度滿足要求。而衛(wèi)星監(jiān)測(cè)的對(duì)象中,偽距、相位、頻率這3項(xiàng),是可以映射到地面SISRE的,也就是說(shuō),這3個(gè)監(jiān)測(cè)對(duì)象的告警門限設(shè)計(jì)還需兼顧與地面告警一致性。
目前地面告警門限是4.42 SISA(約5 m),HS是固定門限(單頻4 m和雙頻7 m),扣除傳播段誤差后,直接反映到衛(wèi)星上的偽距、相位、頻率的門限值為3 m,而相較于告警門限值1 m差別較大,其本質(zhì)原因是門限值1 m是面向衛(wèi)星運(yùn)行健康狀態(tài)的監(jiān)測(cè),而門限值3 m是面向用戶使用的監(jiān)測(cè),因此客觀上就會(huì)存在很大差異。但現(xiàn)行的告警策略是執(zhí)行單一告警門限,監(jiān)測(cè)數(shù)據(jù)觸發(fā)后即向用戶告警,即使用面向衛(wèi)星健康狀態(tài)監(jiān)測(cè)的門限值,去向用戶發(fā)出告警,相比系統(tǒng)為用戶提供的服務(wù)精度更加嚴(yán)苛,后續(xù)可以針對(duì)衛(wèi)星健康狀態(tài)監(jiān)測(cè)和用戶服務(wù)的差異,采樣分級(jí)的監(jiān)測(cè)門限,優(yōu)化系統(tǒng)虛警性能。
SAIM的告警方式包括非標(biāo)準(zhǔn)碼告警、電文告警及通過(guò)遙測(cè)向地面站告警3種方式,應(yīng)該根據(jù)具體告警門限進(jìn)行多級(jí)完好性監(jiān)測(cè)告警。
3.3 星歷完好性自主監(jiān)測(cè)設(shè)計(jì)
目前,星歷的完好性監(jiān)測(cè),只能依賴地面基本完好性監(jiān)測(cè)實(shí)現(xiàn),衛(wèi)星自主完好性尚不具備對(duì)星歷的自主監(jiān)測(cè)能力,將對(duì)系統(tǒng)完好性風(fēng)險(xiǎn)造成潛在影響。雖然當(dāng)前空間環(huán)境下,星歷異常事件屬于小概率事件,系統(tǒng)整體的完好性風(fēng)險(xiǎn)概率也能夠滿足指標(biāo)要求,但考慮到未來(lái)一段時(shí)間的空間環(huán)境變化對(duì)導(dǎo)航衛(wèi)星造成的單粒子效應(yīng)影響問(wèn)題,可以預(yù)見(jiàn)衛(wèi)星星歷異常發(fā)生的頻率將隨之增加,如不解決對(duì)星歷的完好性監(jiān)測(cè)問(wèn)題,后續(xù)系統(tǒng)完好性風(fēng)險(xiǎn)概率有超差的風(fēng)險(xiǎn)。
北斗三號(hào)MEO衛(wèi)星軌道高度約20 000 km,在此高度上,衛(wèi)星會(huì)長(zhǎng)期處于周期性波動(dòng)的高能電子輻射空間環(huán)境中。根據(jù)導(dǎo)航衛(wèi)星的設(shè)計(jì)及實(shí)現(xiàn)情況,并基于長(zhǎng)期運(yùn)行監(jiān)測(cè)經(jīng)驗(yàn),發(fā)現(xiàn)空間環(huán)境發(fā)生惡劣變化,會(huì)威脅并影響衛(wèi)星內(nèi)部電子器件性能,可能導(dǎo)致相應(yīng)數(shù)據(jù)bit位發(fā)生錯(cuò)誤翻轉(zhuǎn),最終產(chǎn)生錯(cuò)誤信息。因此,可以認(rèn)為導(dǎo)航電文中星歷信息發(fā)生異常的概率與導(dǎo)航衛(wèi)星所處的空間環(huán)境呈正相關(guān)關(guān)系,即空間環(huán)境越惡劣,則星歷信息發(fā)生異常的概率越大。北斗三號(hào)MEO衛(wèi)星的設(shè)計(jì)壽命為10年,將經(jīng)歷整個(gè)太陽(yáng)活動(dòng)周期,其中有5年是處在太陽(yáng)活動(dòng)峰值期,爆發(fā)活動(dòng)相對(duì)比較頻繁,衛(wèi)星受單粒子效應(yīng)的影響將更為顯著。中科院空間環(huán)境監(jiān)測(cè)中心對(duì)2006年—2022年太陽(yáng)周期F10.7 cm輻射通量的空間環(huán)境情況進(jìn)行統(tǒng)計(jì)及未來(lái)趨勢(shì)進(jìn)行預(yù)測(cè),結(jié)果顯示,2014年—2022年為太陽(yáng)活動(dòng)平緩期,2022年之后將進(jìn)入空間環(huán)境活躍期,將在2026年左右到達(dá)太陽(yáng)活動(dòng)峰值。根據(jù)過(guò)往歷史運(yùn)維經(jīng)驗(yàn),太陽(yáng)活躍程度與單粒子效應(yīng)發(fā)生頻率呈正相關(guān),空間環(huán)境惡化程度明顯,意味著星歷信息發(fā)生異常的概率也將隨之增大,如果不對(duì)星歷完好性監(jiān)測(cè)這一短板進(jìn)行補(bǔ)強(qiáng),將導(dǎo)致在太陽(yáng)活躍周期期間,北斗系統(tǒng)處于完好性風(fēng)險(xiǎn)事件高發(fā)期,制約用戶使用。因此,非常有必要基于當(dāng)前系統(tǒng)實(shí)際情況,針對(duì)北斗三號(hào)衛(wèi)星星歷的連續(xù)自主監(jiān)測(cè)問(wèn)題進(jìn)行深入研究,對(duì)SAIM功能進(jìn)行升級(jí),使其具備對(duì)星歷的連續(xù)、自主完好性監(jiān)測(cè)功能。
4 結(jié)論
針對(duì)實(shí)際在軌的正態(tài)分布特性服從程度和長(zhǎng)期穩(wěn)定性等問(wèn)題,隨機(jī)選取某一顆MEO衛(wèi)星自2020年7月31日北斗三號(hào)系統(tǒng)正式開通服務(wù)以來(lái)至2021年7月31日連續(xù)1年期間的監(jiān)測(cè)數(shù)據(jù),得到如下工程化應(yīng)用的SAIM數(shù)據(jù)分布特性:
1)導(dǎo)航下行信號(hào)功率監(jiān)測(cè)和偽距測(cè)量監(jiān)測(cè)結(jié)果基本符合正態(tài)分布特性;
2)衛(wèi)星鐘頻率和相位監(jiān)測(cè)值整體上看均有較高穩(wěn)定性,偏度絕對(duì)值均小于0.5,近似正態(tài)分布;
3)SAIM數(shù)據(jù)在長(zhǎng)時(shí)間段下呈現(xiàn)出細(xì)微分段現(xiàn)象,主要是受空間環(huán)境、衛(wèi)星工作狀態(tài)影響,導(dǎo)致監(jiān)測(cè)結(jié)果長(zhǎng)期特性存在細(xì)微分段,但整體依然滿足正態(tài)分布。
后續(xù)發(fā)展必要性建議方向:告警門限優(yōu)化、分級(jí)告警策略設(shè)計(jì)、星歷完好性自主監(jiān)測(cè)等。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25