基于單片機的智能越障探測小車系統設計
2024-03-04 05:11:12楊瑞麗王俊仃陳冉冉
微處理機 2024年1期
楊瑞麗,王俊仃,陳冉冉
(商丘工學院信息與電子工程學院,河南商丘 476000)
1 引言
隨著人工智能的快速發展,智能車輛的應用領域日益廣泛。智能車輛是集傳感器識別模塊、智能控制模塊和驅動模塊等為一體的智能系統[1],是無人駕駛領域的研究熱點。其中的智能小車是以電動小車為載體,屬于一種移動地面智能車,涉及電子技術、計算機、自動控制、信息技術、人工智能等領域的最新技術[2],是智能汽車的典型代表之一。智能探測車可以分為自主式和非自主式。自主式智能探測車可以依靠自身系統獨立導航、避障,獨立執行不同的探測任務;半自主式智能探測車可在人類操作員的監督下自主運行,操作員可在遇到車輛困難時進行遠程干預。智能探測車輛通常配備各種傳感器,可適用于各種工作環境,承擔人們較難執行的探測任務。智能探測小車具有體積小、反應快、生存能力強、成本低、機動性好等特點,它可以移動到固定機器人無法到達的指定地點或危險系數較高的環境,如戶外勘探和考古挖掘、軍事領域等,因此具有很大的應用價值和現實意義。
2 系統設計
2.1 系統硬件設計
系統的控制核心是單片機,其他硬件主要包括信號檢測模塊、驅動模塊和攝像模塊。其整體設計框架如圖1 所示。
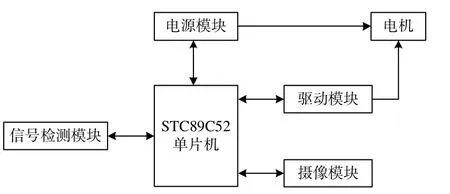
圖1 系統的整體設計框圖
單片機模塊采用STC89C52。作為控制核心,它是一款能耗要求低、可移動存儲、可編程、高性能集成的CMOS 8 位和8k 字節的只讀存儲器。此外,STC89C52 是一個基于靜態邏輯設計的芯片[3],工作時頻率歸零,支持兩種軟件選項的電流節約模式。當中斷RAM 和定時器的串行電壓測量接口并中斷系統的正常工作運行過程時,CPU 在非活動模式下停止運行。下行模式存儲幀的內容,會凍結振蕩器,直到下一個硬件重新啟動其它芯片功能。
驅動模塊中,系統采用的是H 橋驅動電路。L298N 是一個高電壓、高功率的H 電橋,作為驅動電路進行工作的驅動元件[4],擁有一個控制終端。它具有輸入頻率高、靜態電流損失小、輸出工作電流大、電路設置簡單、散熱穩壓效果好、不易變形燃燒等多種特點。它的速度可調節,具有很強的抗干擾能力,可以單獨控制兩臺直流發動機,并且能夠單獨控制直流發動機[5]。
信號檢測模塊向前方介質發出一束紅外線,在前方一定的距離空間內,紅外線如遇到其他障礙物便會快速被該物體反射,紅外線反射信號可實時通過紅外接收管來檢測到。通過合理調整紅外發射管的安裝位置,接收管可確定車輛運行時與前方障礙的距離[6-7]。紅外接收器通常安裝在車輛前端,可串聯安裝。此模塊成本低,安裝方便,運行時響應速度快。
攝像模塊采用單獨的無線攝像裝置,通過攝像頭把智能小車前方的環境信息發送到所連接的便攜式終端,比如手機。手機終端可通過Wi-Fi 功能與攝像頭模塊直接相連,以此可使操控者實時掌握小車所探測地域的環境信息。
2.2 系統軟件設計
整體的軟件設計是采用兩個計數器溢出中斷信號來自動計算兩個障礙物間的距離。其中一個是T0計數器溢出中斷,當與障礙物距離遠且超過既定間隔時,中斷功能將會用于重新設置標志位;另一個是T1 開關中斷,用來檢測道路障礙物、及時評估道路狀態和改變車輛方向的時間間隔[8],以便車輛能夠及時避開障礙物。系統總體設計流程如圖2 所示。
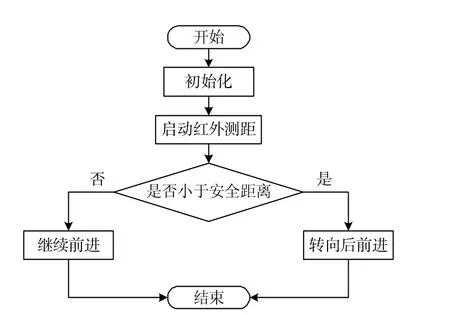
圖2 整體設計流程圖
對于信號檢測子模塊,在軟件設計中,需要小車系統的探測原理。紅外探測器向前方發出紅外線光,遇到障礙物后光線會被反射回來并被紅外光接收器接收,根據接收到的光線強弱進行信號的反饋。假設前方有障礙物,光電開關產生低電平信號,并將信號傳輸至單片機,由單片機進行處理后再產生指令,并將指令傳輸至驅動模塊。這時車輛會按照相應程序向右或向左行駛,以避開障礙物。紅外檢測流程圖如圖3 所示。

圖3 紅外檢測流程圖
驅動子模塊主要采用兩個直流電機實現相關功能,通過改變電機兩端輸入電壓的相對極性來實現正反轉電流的控制,從而實現對直流電機的運行狀況的控制。自主避障流程圖如圖4 所示。
3 系統實現
經過反復調整和測試,系統正常工作。當遇到前方障礙物,會自動調整轉向,圖像傳輸正常穩定。硬件電路調試的實物狀況如圖5 所示。
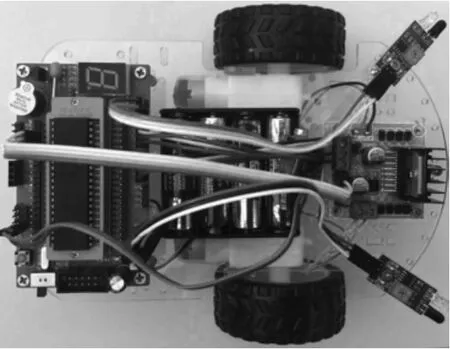
圖5 硬件電路調試實物圖
當小車左前方遇到障礙物時,左前方信號檢測模塊LED 燈全亮,顯示情況如圖6 所示。
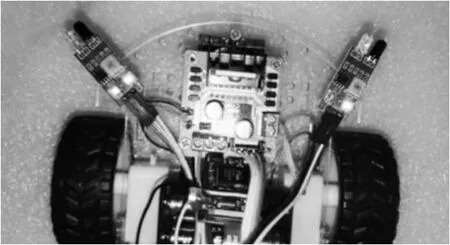
圖6 信號檢測模塊檢測到左前方障礙物
當小車右前方遇到障礙物時,右前方信號檢測模塊LED 燈全亮,顯示情況如圖7 所示。
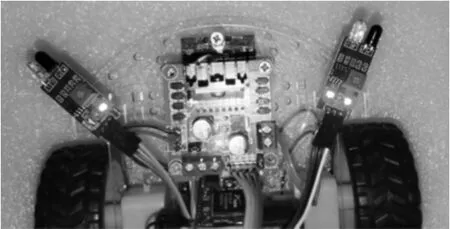
圖7 信號檢測模塊檢測到右前方障礙物
將攝像模塊與單片機相連。當攝像模塊正常工作時,手機通過Wi-Fi 與攝像模塊相連,然后打開手機安裝好的應用軟件WiFi View,可實時查看小車所拍攝的環境信息。手機查看圖像界面如圖8 所示。

圖8 手機查看圖像界面
至此,該智能小車越障探測系統的設計功能得到完好的實現。
4 結束語
整個系統以STC89C52 單片機作為主控芯片,以紅外探測裝置作為信號檢測單元,再輔以電源、驅動等多個功能模塊,實現了系統的穩定獨立運行。通過紅外傳感器和STC89C52 芯片獨特的微機功能以及PWM 技術實現控制發動機轉速的功能。此外,采用能夠進行圖像無線傳輸的RT5350 Wi-Fi 攝像模塊,確保在陌生環境條件下,操控者可以運用所配套的手機終端遠程查看現場圖像。整個小車系統反應靈敏、性能穩定,具有較好的研究價值和應用前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42