基于改進麻雀搜索算法模糊PID控制器設計
2024-03-01 07:07:16陳鯉文劉偉濤寧志翔朱婧
電工材料 2024年1期
陳鯉文, 劉偉濤, 寧志翔, 朱婧
(福建工程學院 泛在感知與多傳感器智能融合研究所,福建福州 350118)
0 引言
無刷直流電機具有效率高、維護少、控制精確等優點,廣泛應用于汽車、自動化、航空航天等工業控制領域。無刷直流電機主要采用電子換向,利用電子設備通過霍爾元件感應永磁極的位置,電子電路及時切換線圈中的電流方向,驅動電機。這種方法不僅消除了有刷電機的電刷與換向器之間的摩擦功耗等缺點,而且使其更容易控制。無刷直流電機的主要挑戰是換向轉矩波動。
近年來提出了多種控制電機轉矩和轉速的方法。采用大功率無刷直流電機的閉環控制對其轉速進行檢測,并采用PID調整參數,使其運行性能穩定在穩態,但它會在瞬態中有一些超調。由于無刷直流電機的非線性特性,傳統的PID控制方法在達到穩態時會產生抖動。因此有必要設計一個適用的PID控制器[1]。本設計主要通過時變慣性權重改進麻雀搜索算法模糊PID控制器控制無刷直流電機,并采用Matlab/Simulink進行仿真驗證。
1 控制器設計
1.1 模糊PID控制器
選用的模糊控制器為單變量二維模糊邏輯控制器。在Matlab模糊控制中定義誤差e、誤差變化率ec及控制量u的模糊集及其論域。確定模糊變量的隸屬函數。采用模糊PID控制無刷直流電機的轉速與轉矩,在構建模糊PID控制器[2-3]時,輸入為系統的誤差e和誤差變化率ec,通過模糊語言變量將輸入變為模糊語言變量E和EC,讓模糊控制結果作用在PID控制器上,用來實時調節PID的Kp、Ki、Kd參數。
1.2 時變慣性權重改進的麻雀搜索算法模糊PID控制器
麻雀搜索算法[4-5]是受麻雀覓食行為和反捕食行為啟發而提出的一種新型群體智能優化算法。在麻雀覓食過程中,可將其整體種群分為發現者和追蹤者,并且加入偵察預警機制,發現者在種群中的主要任務是尋找食物并為整個麻雀種群提供覓食區域和方向,而追隨者主要是依賴發現者來獲取食物。為了獲得食物,麻雀可采用發現者和追隨者兩類行為策略進行覓食。偵察預警機制主要是從種群總體中選取一定比例個體來偵察預警,若此類麻雀發現危險則選擇放棄食物,以保證種群安全。對于每個麻雀個體,其可能有三種狀態改變:充當發現者、作為追隨者、具備警戒機制。
種群中發現者,有較強的搜索能力,且具備全局導向能力,因此發現者需要具備更大的覓食搜索范圍,由此抽象其位置更新表達式為:
種群中除去發現者,剩余麻雀均為追隨者。追隨者的位置更新表達式為:
當最優位置麻雀在局部最優解處搜索時,隨著不斷地迭代,剩余的麻雀也會沿著最優麻雀的方向移動,從而出現局部最優的問題。為了解決這一問題,引入一個非線性遞減權在Piecewise混沌映射改進的麻雀搜索算法中,主要是其可以在早期促進全局最優的搜索,在后期進行局部最優搜索。這可以有效地防止種群陷入局部最優。時變慣性權重如公式(3)所示。
在Piecewise混沌映射改進的麻雀搜索算法中加入時變慣性權重之后,最終更新表達式為:
基于改進麻雀搜索算法模糊PID控制器如圖1所示。
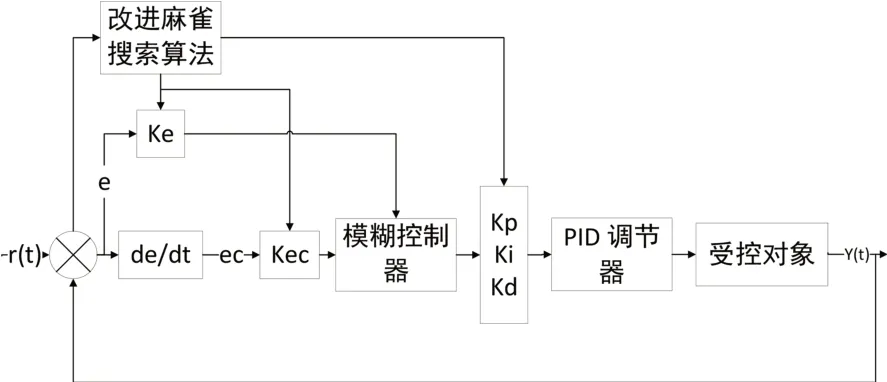
圖1 改進麻雀搜索算法模糊PID控制器
2 Matlab仿真與實驗結果
2.1 無刷直流電機的數學建模[6]
Simulink模型中無刷直流電機的驅動方式采用兩相導通方式,定子三相繞組采用星形連接,無中性線,轉子磁極為環形內轉子磁極。假設無刷直流電機工作在理想狀態下,忽略電機的摩擦損耗和雜散損耗,根據能量守恒定律,輸出的機械能和吸收的電能相等。電樞繞組為三相對稱結構,各繞組的互感和電阻相同。基于直流無刷電機理想化模型其電壓方程為:
式中:uA,uB,uC為定子電壓;eA,eB,eC為定子反電動勢;iA,iB,iC為定子電流;R為電子繞組相電阻,且RA=RB=RC=R;L為定子電感,且LA=LB=LC=L;M為定子繞組間互感,且LAB=LAC=LBA=LBC=LCA=LCB=M;t為時間。假設電動機轉速為ω,則電磁轉矩的計算公式為:
式中:Te為BLDC的電磁轉矩;ω為BLDC的角速度。
機械運動方程為:
式中:TL為負載轉矩;J為電機轉動慣量;B為阻尼系數。
電機控制主要研究的是無刷直流電機的輸出轉速與轉矩。模型主要是時變慣性權重改進麻雀搜索算法模糊PID控制器的輸出電流參考值,比較作差后輸入電流滯環控制器,經過PWM控制三相六臂全橋驅動器控制電機輸出。控制直流無刷電動機運動仿真如圖2所示。

圖2 直流無刷電機控制仿真
2.2 實驗結果分析
通過時變慣性權重改進的麻雀搜索算法優化模糊PID控制器對無刷直流電機進行仿真,初始條件設為960 r/min,在1 s時進行速度切換,速度變為200 r/min;在0.5 s時加入小負載,在1 s時撤去負載并且改變電機的轉速,總仿真時長設置為2 s。圖3和圖4分別為時變慣性權重改進麻雀搜索算法模糊PID控制器控制下的無刷直流電機轉速與轉矩輸出仿真圖。從圖3可以看出,電機在啟動后經過0.45 s達到預定的速度,并且0.5 s時能快速響應負載波動變化。在1 s時電機開始切換速度且撤去負載,當負載與速度切換同時發生時,無刷直流電機既能響應負載變化,又能同時進行速度切換。經過0.25 s,電機速度趨于平穩輸出。從圖4可以看出,無刷直流電機在上升到預定速度過程中轉矩波動較大,但電機穩定運行時轉矩保持平穩,在無刷直流電機轉速切換時引起輕微波動,但此波動在規定范圍內。經過0.36 s后電機轉矩達到平穩狀態。仿真結果平穩且符合實際要求。

圖3 時變慣性權重改進麻雀搜索算法模糊PID控制器控制下的直流無刷電機轉速
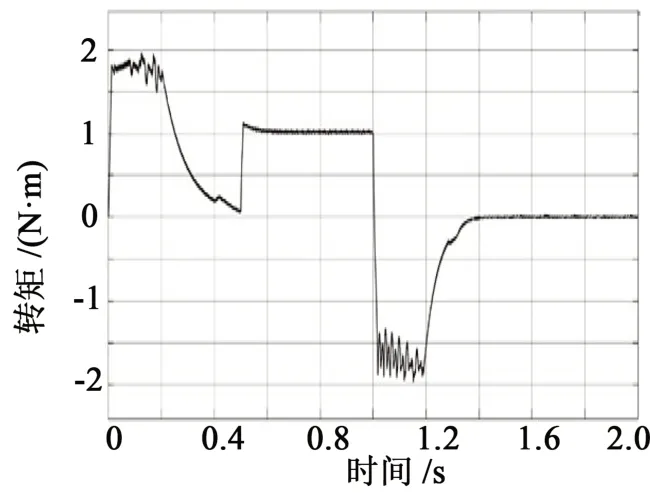
圖4 時變慣性權重改進麻雀搜索算法模糊PID控制器控制下的直流無刷電機轉矩
為進一步驗證設計的控制器的有效性,通過Matlab生成了三種PID的控制曲線(如圖5所示)。從PID控制曲線可以看出當無刷直流電機上升到預定速度時會出現超調導致電機的速度不穩定,并且無刷直流電機轉速產生較大的波動。在PID的基礎上使用模糊邏輯模仿人的行為去控制無刷直流電機的轉速,由曲線可以看出,當無刷直流電機達到預定速度時,無刷直流電機能夠平穩運行,但在達到預定速度時間上慢于PID控制控制器。在模糊PID的基礎上加入時變慣性權重改進麻雀搜索算法,從圖中曲線可以看出電機能夠很快到達預定的速度且沒有超調,相對于模糊PID控制器在達到預定速度時在時間上減少了50%且快于PID控制器。由此進一步驗證了設計的時變線性權重改進的麻雀搜索算法優化模糊PID控制器是可靠的且符合要求。

圖5 模糊控制器PID直流無刷電機轉矩
3 結論
建立了無刷直流電機轉速轉矩控制仿真模型,通過Matlab/Simulink建立控制器將其加載到無刷直流電機上進行模擬控制,通過仿真實驗與三種控制器的轉速對比驗證了提出的改進的麻雀搜索算法優化模糊PID控制器的有效性。