一種礦用管道檢測(cè)機(jī)器人設(shè)計(jì)及牽引性能分析
2024-03-01 09:54:12趙鵬洋閆宏偉張登崤肖粲俊何勃龍
工礦自動(dòng)化 2024年1期
關(guān)鍵詞:檢測(cè)
趙鵬洋, 閆宏偉, 張登崤, 肖粲俊, 何勃龍
(1. 中北大學(xué) 機(jī)械工程學(xué)院,山西 太原 030051;2. 山西宏安翔科技股份有限公司,山西 運(yùn)城 044000)
0 引言
隨著瓦斯抽采管道服役時(shí)間的增長(zhǎng),瓦斯管道內(nèi)會(huì)出現(xiàn)漏點(diǎn)、凹坑、腐蝕等問題,引起管道薄弱處破損泄漏,使空氣進(jìn)入管道內(nèi),當(dāng)管道內(nèi)瓦斯?jié)舛冉抵帘O限時(shí),可能引發(fā)爆炸事故,影響安全生產(chǎn)[1-4]。目前普遍采取人工巡查方式檢查井下瓦斯抽采管道運(yùn)行情況,無法及時(shí)發(fā)現(xiàn)管道泄漏點(diǎn),且效率低下。礦用管道機(jī)器人在煤礦瓦斯管道泄漏事故預(yù)防與應(yīng)急防控領(lǐng)域有很好的發(fā)展?jié)摿Α5V用管道機(jī)器人是一種作業(yè)在狹小空間內(nèi)的特種機(jī)器人,可搭載多種類型的傳感器,具備數(shù)據(jù)分析、存儲(chǔ)能力,能夠與遠(yuǎn)程控制臺(tái)通信并保持良好的姿態(tài)控制,實(shí)現(xiàn)煤礦管道內(nèi)作業(yè)[5-8]。然而,煤礦井下管道內(nèi)部的爆炸性氣體環(huán)境、封閉受限空間、無線通信衰減等,均給礦用管道機(jī)器人的結(jié)構(gòu)設(shè)計(jì)和巡檢作業(yè)帶來嚴(yán)峻挑戰(zhàn)[9]。
根據(jù)管道機(jī)器人結(jié)構(gòu)不同,將管道機(jī)器人分為輪式和非輪式。輪式機(jī)器人根據(jù)運(yùn)動(dòng)方式又可分為直輪驅(qū)動(dòng)式和螺旋驅(qū)動(dòng)式[10]。文獻(xiàn)[11]設(shè)計(jì)了一種輪式管道封堵機(jī)器人,研究其通過焊縫時(shí)的動(dòng)態(tài)特性,并通過鯨魚算法控制機(jī)器人通過焊縫時(shí)的傾角與振動(dòng)。文獻(xiàn)[12]設(shè)計(jì)了一種履帶式管道檢測(cè)機(jī)器人,通過調(diào)整每個(gè)履帶足速度,實(shí)現(xiàn)機(jī)器人在管道內(nèi)的姿態(tài)調(diào)節(jié),以適應(yīng)管道內(nèi)幾何約束,同時(shí)調(diào)節(jié)履帶足的正壓力。文獻(xiàn)[13]設(shè)計(jì)了一種螺旋式管道機(jī)器人,通過拉繩結(jié)構(gòu)變換螺旋角,實(shí)現(xiàn)在分支管道和曲率半徑為零的分支管道中運(yùn)行。非輪式機(jī)器人包括腿式、蛇形式等結(jié)構(gòu)。蛇形式機(jī)器人由多個(gè)關(guān)節(jié)模塊組成,具有很多自由度,但控制系統(tǒng)非常復(fù)雜[14];腿式機(jī)器人具有更好的運(yùn)動(dòng)步態(tài),但運(yùn)行速度不如輪式機(jī)器人,且需要復(fù)雜的算法[15]。
煤礦井下作業(yè)環(huán)境復(fù)雜、惡劣,用于瓦斯抽采管道檢測(cè)的機(jī)器人設(shè)計(jì)應(yīng)遵循輕量化、低功耗、易于控制的原則,且需具備良好的牽引性能[16-17]。履帶式機(jī)器人的履帶與管道接觸面積較大,能提供較大的摩擦力和良好的牽引力[18],但其結(jié)構(gòu)復(fù)雜,且容易出現(xiàn)“運(yùn)動(dòng)死點(diǎn)”現(xiàn)象,導(dǎo)致其轉(zhuǎn)彎時(shí)性能較差[19]。螺旋式機(jī)器人結(jié)構(gòu)簡(jiǎn)單、易于控制,在彎管中的通過性能較好,但通常僅有1 個(gè)驅(qū)動(dòng)器,存在牽引力不足、載重能力有限等問題[20-21]。
基于瓦斯抽采管道檢測(cè)用機(jī)器人的設(shè)計(jì)原則,本文選用螺旋驅(qū)動(dòng)式結(jié)構(gòu),設(shè)計(jì)了一種礦用管道檢測(cè)機(jī)器人,通過試驗(yàn)平臺(tái)驗(yàn)證了影響機(jī)器人牽引特性的因素,旨在提升礦用螺旋式管道機(jī)器人的工作效率和安全性。
1 礦用管道檢測(cè)機(jī)器人設(shè)計(jì)
1.1 機(jī)器人結(jié)構(gòu)
礦用管道檢測(cè)機(jī)器人由螺旋運(yùn)動(dòng)單元、電動(dòng)機(jī)驅(qū)動(dòng)單元、支撐單元、前置檢測(cè)與控制單元、后置檢測(cè)與控制單元組成,如圖1 所示。機(jī)器人整體采用非金屬外殼封裝,具備防塵、防潮、抗腐蝕功能,以適應(yīng)煤礦井下氣體環(huán)境、管道內(nèi)封閉受限空間條件。

圖1 礦用管道檢測(cè)機(jī)器人模型Fig. 1 Model of mine pipeline inspection robot
螺旋運(yùn)動(dòng)單元結(jié)構(gòu)如圖2 所示。其有3 個(gè)驅(qū)動(dòng)模塊,彼此間隔120°。每個(gè)驅(qū)動(dòng)模塊內(nèi)置彈簧與舵機(jī),驅(qū)動(dòng)模塊上的驅(qū)動(dòng)輪與管道軸線之間有一個(gè)夾角,稱為螺旋角。驅(qū)動(dòng)輪旋轉(zhuǎn)可產(chǎn)生沿管道軸線方向的驅(qū)動(dòng)力。中心電動(dòng)機(jī)通過錐齒輪傳動(dòng),帶動(dòng)同步帶與絲杠旋轉(zhuǎn)。絲杠螺母可在絲杠上移動(dòng),以調(diào)節(jié)彈簧壓縮量,從而控制驅(qū)動(dòng)輪的正壓力。聯(lián)軸器用于連接電動(dòng)機(jī)驅(qū)動(dòng)單元,周向設(shè)有3 個(gè)電池倉(cāng),內(nèi)置電池來保證續(xù)航。
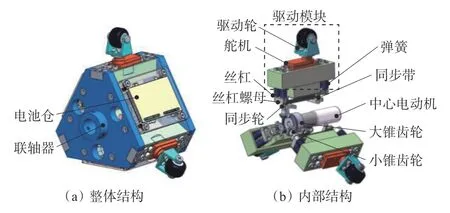
圖2 螺旋運(yùn)動(dòng)單元結(jié)構(gòu)Fig. 2 Structure of spiral motion unit
電動(dòng)機(jī)驅(qū)動(dòng)單元結(jié)構(gòu)如圖3(a)所示。電池箱為主體支撐,具有4 個(gè)電池倉(cāng)。驅(qū)動(dòng)電動(dòng)機(jī)由4 個(gè)連接桿固定。支撐單元結(jié)構(gòu)如圖3(b)所示。3 個(gè)支撐模塊周向120°焊接在支撐座上,支撐輪可通過升降桿擠壓彈簧,從而主動(dòng)適應(yīng)不同管徑的管道。支撐單元可平衡螺旋運(yùn)動(dòng)單元旋轉(zhuǎn)過程中產(chǎn)生的反向轉(zhuǎn)矩,驅(qū)動(dòng)電動(dòng)機(jī)帶動(dòng)前側(cè)的螺旋運(yùn)動(dòng)單元繞管道軸線做圓周運(yùn)動(dòng),驅(qū)動(dòng)機(jī)器人在管道內(nèi)做螺旋運(yùn)動(dòng)。
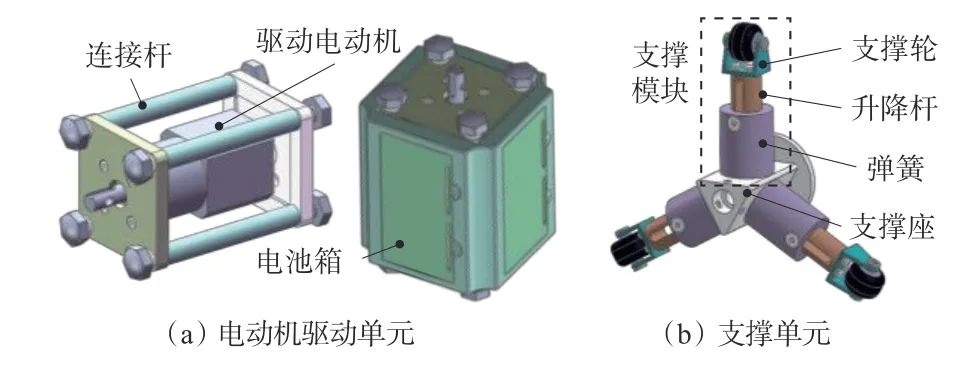
圖3 電動(dòng)機(jī)驅(qū)動(dòng)單元與支撐單元結(jié)構(gòu)Fig. 3 Structure of motor drive unit and support unit
礦用管道檢測(cè)機(jī)器人的主要技術(shù)參數(shù)見表1。

表1 礦用管道檢測(cè)機(jī)器人主要技術(shù)參數(shù)Table 1 Main technical parameters of mine pipeline inspection robot
1.2 檢測(cè)與控制系統(tǒng)
礦用管道檢測(cè)機(jī)器人檢測(cè)與控制系統(tǒng)包括管道信息采集單元、機(jī)器人運(yùn)動(dòng)控制單元、無線通信單元,如圖4 所示。
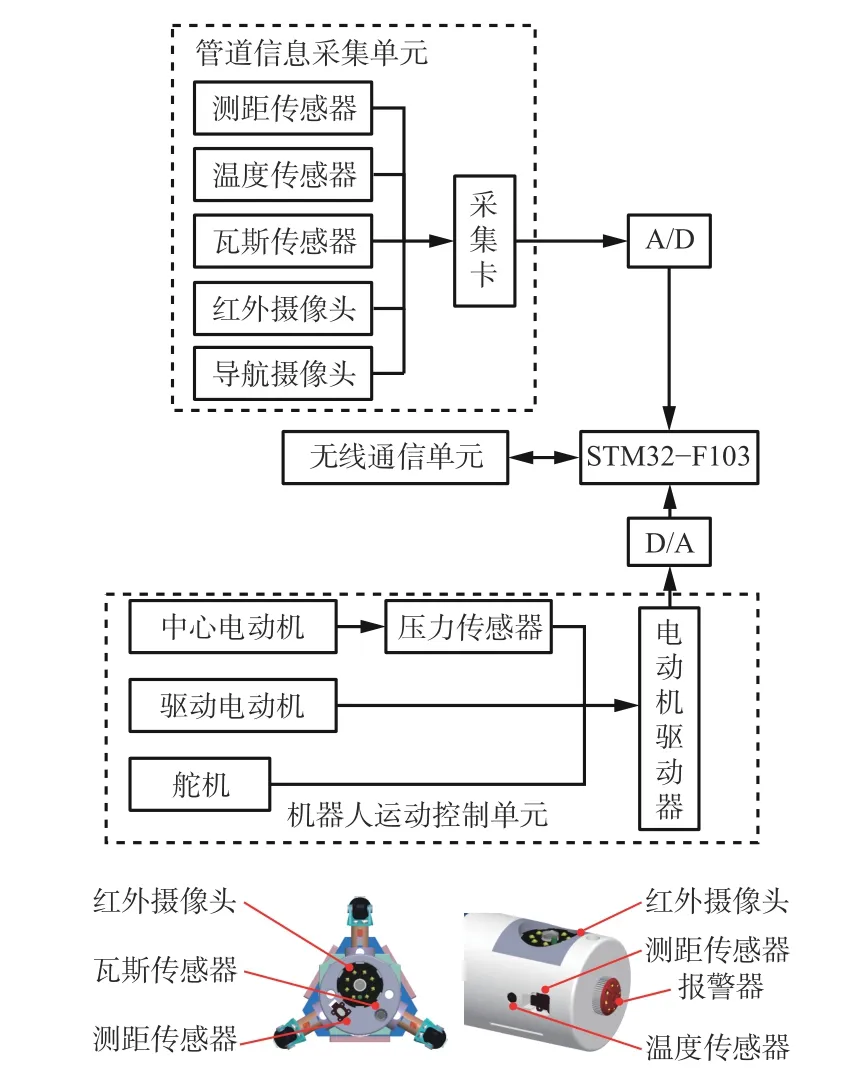
圖4 礦用管道機(jī)器人檢測(cè)與控制系統(tǒng)組成Fig. 4 Composition of detection and control system of mine pipeline inspection robot
管道信息采集單元可采集管道圖像信息和環(huán)境信息。圖像信息采集單元由2 個(gè)可自動(dòng)對(duì)焦的紅外夜視攝像頭組成,攝像頭放置于機(jī)器人前側(cè)與后側(cè),可在機(jī)器人螺旋前進(jìn)過程中繞管道軸線不斷旋轉(zhuǎn)掃描,在昏暗的環(huán)境內(nèi)捕捉管道內(nèi)壁裂紋、漏點(diǎn)、凹坑、腐蝕等缺陷信息,滿足管道內(nèi)壁360°檢測(cè)需求。環(huán)境信息采集單元包括瓦斯傳感器、溫度傳感器、測(cè)距傳感器,分別用于測(cè)量管道內(nèi)瓦斯?jié)舛取囟取⒐軓健.?dāng)檢測(cè)到瓦斯?jié)舛冉抵帘O限時(shí),機(jī)器人實(shí)時(shí)報(bào)警。管道信息采集單元還包含導(dǎo)航攝像頭,實(shí)現(xiàn)機(jī)器人定位導(dǎo)航功能。
機(jī)器人運(yùn)動(dòng)控制單元可控制3 個(gè)舵機(jī)的偏轉(zhuǎn)角度、驅(qū)動(dòng)電動(dòng)機(jī)轉(zhuǎn)速及中心電動(dòng)機(jī),從而調(diào)節(jié)機(jī)器人在管道內(nèi)運(yùn)行的位姿、速度及過彎方式。壓力傳感器用于測(cè)量驅(qū)動(dòng)輪對(duì)管道內(nèi)壁的壓力,計(jì)算當(dāng)前壓力與目標(biāo)壓力之間的誤差,將誤差信號(hào)作為PID 輸出信號(hào)來控制中心電動(dòng)機(jī)調(diào)節(jié)正壓力,以達(dá)到設(shè)定的機(jī)器人牽引力,提高機(jī)器人在管道內(nèi)的工作效率。
機(jī)器人CPU 選用STM32-F103。機(jī)器人與上位工控機(jī)之間通過無線方式通信。機(jī)器人可將采集數(shù)據(jù)上傳至工控機(jī),并接收操作員通過上位機(jī)發(fā)出的指令,執(zhí)行管道內(nèi)運(yùn)行、信息采集和缺陷檢測(cè)等任務(wù)。
2 機(jī)器人力學(xué)模型建立與分析
2.1 機(jī)器人直管牽引性能分析
管道機(jī)器人進(jìn)入管道作業(yè)時(shí),受制于管道內(nèi)幾何形狀的約束,其產(chǎn)生的牽引力有限。機(jī)器人牽引力分析模型如圖5 所示。Fw為機(jī)器人牽引力,F(xiàn)T為驅(qū)動(dòng)模塊旋轉(zhuǎn)過程中作用在驅(qū)動(dòng)輪上的驅(qū)動(dòng)力,F(xiàn)f為機(jī)器人在螺旋行進(jìn)過程中由于驅(qū)動(dòng)輪發(fā)生側(cè)滑而產(chǎn)生的側(cè)向力,N為驅(qū)動(dòng)輪與管道內(nèi)壁間的法向力, α為螺旋角, θ為機(jī)器人實(shí)際運(yùn)行方向與期望運(yùn)行方向的夾角。

圖5 管道檢測(cè)機(jī)器人牽引力分析模型Fig. 5 Tractive force analysis model of mine pipeline inspection robot
機(jī)器人受到的側(cè)向力Ff計(jì)算公式為
式中: μ為動(dòng)摩擦因數(shù);Ky為驅(qū)動(dòng)輪的偏轉(zhuǎn)剛度系數(shù)。
機(jī)器人能夠產(chǎn)生牽引力的條件為
考慮到理想狀況下,驅(qū)動(dòng)輪可提供足夠的摩擦力,驅(qū)動(dòng)輪不發(fā)生滑移,即θ=α,此時(shí)機(jī)器人的牽引力Fw計(jì)算公式為
由上述分析可知,機(jī)器人在管道內(nèi)運(yùn)行的牽引力與螺旋角、機(jī)器人所受的法向力、驅(qū)動(dòng)輪與管道內(nèi)壁接觸情況及管道材質(zhì)相關(guān)。設(shè)定μ=0.2,機(jī)器人牽引力與螺旋角、法向力的關(guān)系如圖6 所示。可看出牽引力隨法向力的增大而增大,隨螺旋角的增大先增大后減小,螺旋角約為40°時(shí)牽引力最大,為90°(驅(qū)動(dòng)輪與管道軸線垂直)時(shí)牽引力為0。法向力約為100 N 時(shí)符合管道機(jī)器人牽引力設(shè)計(jì)需求,為后續(xù)仿真設(shè)置合理參數(shù)和初值奠定了理論依據(jù)。

圖6 管道檢測(cè)機(jī)器人牽引力與螺旋角和法向力的關(guān)系Fig. 6 The relationship between traction force, spiral angle and normal force of mine pipeline inspection robot
2.2 機(jī)器人過彎分析
由2.1 節(jié)可知,機(jī)器人在直管中運(yùn)行時(shí)保持螺旋角 α不變,則可以穩(wěn)定運(yùn)行。但在彎管中運(yùn)行(過彎)時(shí),若仍保持螺旋角不變,受制于管道內(nèi)復(fù)雜的幾何約束,驅(qū)動(dòng)輪會(huì)與管道內(nèi)壁發(fā)生側(cè)滑,影響機(jī)器人過彎時(shí)的牽引性能。在直管中運(yùn)行時(shí),機(jī)器人的每個(gè)驅(qū)動(dòng)輪沿管道軸線方向的速度是一樣的,過彎時(shí)可控制驅(qū)動(dòng)輪的螺旋角不同,使驅(qū)動(dòng)輪沿管道軸線方向速度不一致,即差速過彎。因此,提出一種變螺旋角過彎方式,即機(jī)器人主動(dòng)控制螺旋角隨螺旋運(yùn)動(dòng)單元轉(zhuǎn)動(dòng)以正弦式規(guī)律變化,使機(jī)器人在過彎時(shí)具有良好的牽引性能。機(jī)器人過彎牽引力分析模型如圖7 所示。 φ為螺旋運(yùn)動(dòng)單元旋轉(zhuǎn)過程中轉(zhuǎn)過的角度,R為管道曲率半徑,D為管道直徑, β為管道轉(zhuǎn)角。

圖7 管道檢測(cè)機(jī)器人過彎牽引力分析模型Fig. 7 Traction force analysis model of mine pipeline inspection robot navigating curved pipes
機(jī)器人在直管中的運(yùn)行速度為[20]
dt時(shí)間內(nèi)管道軸線內(nèi)側(cè)驅(qū)動(dòng)輪走過的弧長(zhǎng)為
式中αmin為最小螺旋角。
dt時(shí)間內(nèi)管道軸線外側(cè)驅(qū)動(dòng)輪走過的弧長(zhǎng)為
式中αmax為最大螺旋角。
構(gòu)造變螺旋角函數(shù):
式中m,n為構(gòu)造系數(shù),m,n>0。
針對(duì)D=200 mm 的管道,設(shè)定管道曲率半徑R=600 mm,管道轉(zhuǎn)角β=π/2,則構(gòu)造的螺旋角變化規(guī)律如圖8 所示,該曲線方程為

圖8 螺旋角變化規(guī)律Fig. 8 Variation of spiral angle
2.3 機(jī)器人最佳行進(jìn)姿態(tài)分析
機(jī)器人在管道內(nèi)作業(yè)時(shí)不僅前后運(yùn)行,還會(huì)繞管道軸線轉(zhuǎn)動(dòng),負(fù)重作業(yè)時(shí)要求保持最佳的運(yùn)行姿態(tài)角。機(jī)器人運(yùn)行時(shí)所受法向力如圖9 所示。以管道截面中心點(diǎn)為原點(diǎn)建立三維坐標(biāo)系OXYZ, ω為姿態(tài)角,即支撐單元與OXZ平面的夾角,N1,N2,N3為3 個(gè)驅(qū)動(dòng)輪所受法向力,F(xiàn)i為驅(qū)動(dòng)輪與管道內(nèi)壁之間的摩擦力。驅(qū)動(dòng)輪與管道內(nèi)壁總封閉力為

圖9 管道檢測(cè)機(jī)器人運(yùn)行時(shí)的法向力分布Fig. 9 Normal force distribution during operation of mine pipeline inspection robot
式中:m為支撐單元的質(zhì)量;g為重力加速度; γ為管道坡度(管道與水平面的夾角)。
定義Ig為驅(qū)動(dòng)因子,即驅(qū)動(dòng)輪與管道內(nèi)壁總封閉力與機(jī)器人重力的比值。
由式(14)可知,機(jī)器人姿態(tài)角影響驅(qū)動(dòng)因子。為了最大程度地利用驅(qū)動(dòng)因子,可增加法向力并選擇最優(yōu)姿態(tài)角來提升機(jī)器人的牽引性能。驅(qū)動(dòng)因子與姿態(tài)角關(guān)系如圖10 所示。設(shè)定管道坡度γ=0,當(dāng)姿態(tài)角 ω=0,120,240°時(shí),機(jī)器人具有最大驅(qū)動(dòng)因子。
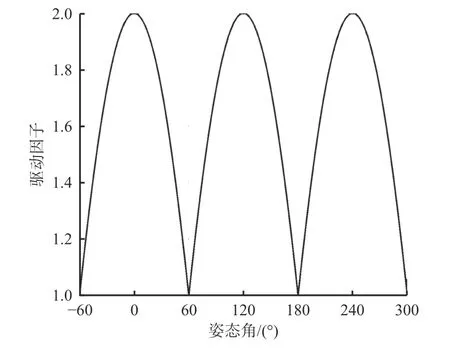
圖10 驅(qū)動(dòng)因子與姿態(tài)角關(guān)系Fig. 10 Relationship between driving factor and attitude angle
3 機(jī)器人牽引性能仿真
基于ADAMS 仿真軟件建立管道檢測(cè)機(jī)器人仿真模型,如圖11 所示。模型中刪除外殼等不必要零件,僅保留具有傳動(dòng)部分的零件,添加相應(yīng)的運(yùn)動(dòng)副。

圖11 管道檢測(cè)機(jī)器人仿真模型Fig. 11 Simulation model of mine pipeline inspection robot
3.1 管道材質(zhì)對(duì)牽引力的影響
為擴(kuò)大管道檢測(cè)機(jī)器人應(yīng)用場(chǎng)景,仿真中選用鋼、鋁及有機(jī)玻璃作為管道材質(zhì)。管道檢測(cè)機(jī)器人的牽引力取決于驅(qū)動(dòng)輪與管道內(nèi)壁的摩擦力,與管道材質(zhì)、運(yùn)輸介質(zhì)、運(yùn)輸壓力有關(guān)。
在ADAMS 中模擬不同工況下管道檢測(cè)機(jī)器人在直管中運(yùn)動(dòng)的牽引力。根據(jù)2.1 節(jié)分析可知,螺旋角在40°左右時(shí)機(jī)器人具有最大牽引力,因此設(shè)定螺旋角為40°。設(shè)置機(jī)器人各部件材料屬性:剛度系數(shù)為2 855,力的指數(shù)為1.1,阻尼系數(shù)為0.57,穿透深度為0.1。驅(qū)動(dòng)輪材質(zhì)為橡膠,其與管道接觸參數(shù)見表2。設(shè)定管道直徑為200 mm,機(jī)器人在不同材質(zhì)管道中的靜平移速度均為1 mm/s,摩擦平移速度均為10 mm/s,運(yùn)行時(shí)間為5 s。根據(jù)2.3 節(jié)分析結(jié)果可知,姿態(tài)角為0,120,240°時(shí)機(jī)器人的驅(qū)動(dòng)因子最大,因此設(shè)置機(jī)器人姿態(tài)角為0。對(duì)管道與大地添加固定副,管道坡度為0。
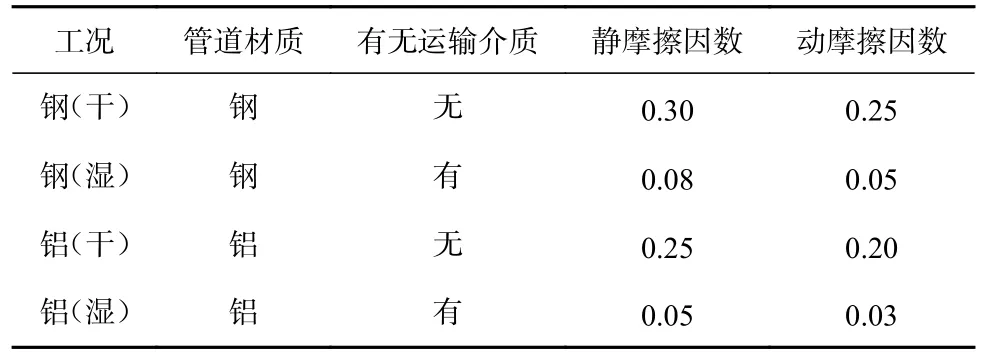
表2 驅(qū)動(dòng)輪與管道接觸參數(shù)Table 2 Contact parameters of driving wheel and pipe
仿真時(shí)在機(jī)器人與管道之間放置一個(gè)拉壓彈簧,模擬機(jī)器人在運(yùn)行過程中產(chǎn)生的牽引力(與彈簧彈力大小相等,方向相反)。拉壓彈簧放置于管道軸線上,一端連接機(jī)器人中心點(diǎn),另一端連接管道截面中心點(diǎn)。設(shè)置彈簧的剛度系數(shù)為800,阻尼系數(shù)為0.5。機(jī)器人在直管中運(yùn)行時(shí)的牽引力仿真結(jié)果如圖12 所示。可看出在4 種工況下,牽引力隨機(jī)器人運(yùn)行逐漸增大,當(dāng)機(jī)器人達(dá)到最大速度后牽引力逐漸穩(wěn)定,并在小范圍內(nèi)波動(dòng),此時(shí)機(jī)器人發(fā)生打滑;機(jī)器人牽引力隨摩擦因數(shù)的增大而增大;在相同材質(zhì)的管道內(nèi),無運(yùn)輸介質(zhì)時(shí)機(jī)器人牽引力遠(yuǎn)大于有運(yùn)輸介質(zhì)時(shí)。

圖12 管道檢測(cè)機(jī)器人在直管中不同工況下的牽引力仿真結(jié)果Fig. 12 Traction force simulation results of mine pipeline inspection robot in straight pipe under different working conditions
3.2 螺旋角對(duì)牽引力的影響
設(shè)置機(jī)器人過彎時(shí)的參數(shù):管徑為200 mm,管道曲率半徑為600 mm,管道材質(zhì)為鋼(干),其余參數(shù)與直管內(nèi)運(yùn)行時(shí)相同。
設(shè)定2 種運(yùn)行工況:① 機(jī)器人以固定螺旋角40°過彎。② 機(jī)器人以變螺旋角過彎,螺旋角隨旋轉(zhuǎn)運(yùn)動(dòng)單元轉(zhuǎn)動(dòng)以第2.3 節(jié)構(gòu)造的余弦函數(shù)(式(12))變化,最小值為20°,最大值為60°。機(jī)器人過彎時(shí)牽引力仿真結(jié)果如圖13 所示。可看出機(jī)器人過彎時(shí)產(chǎn)生的牽引力小于相同條件下在直管中運(yùn)行時(shí)的牽引力,且在一定范圍內(nèi)波動(dòng);機(jī)器人以變螺旋角過彎時(shí),牽引力達(dá)到最大值的時(shí)間早于以定螺旋角過彎,且牽引力波動(dòng)程度更小。變螺旋角過彎時(shí),機(jī)器人與彎管截面呈圓形,而定螺旋角過彎時(shí)呈橢圓形。因此,變螺旋角過彎時(shí)機(jī)器人運(yùn)行更平穩(wěn)、高效。
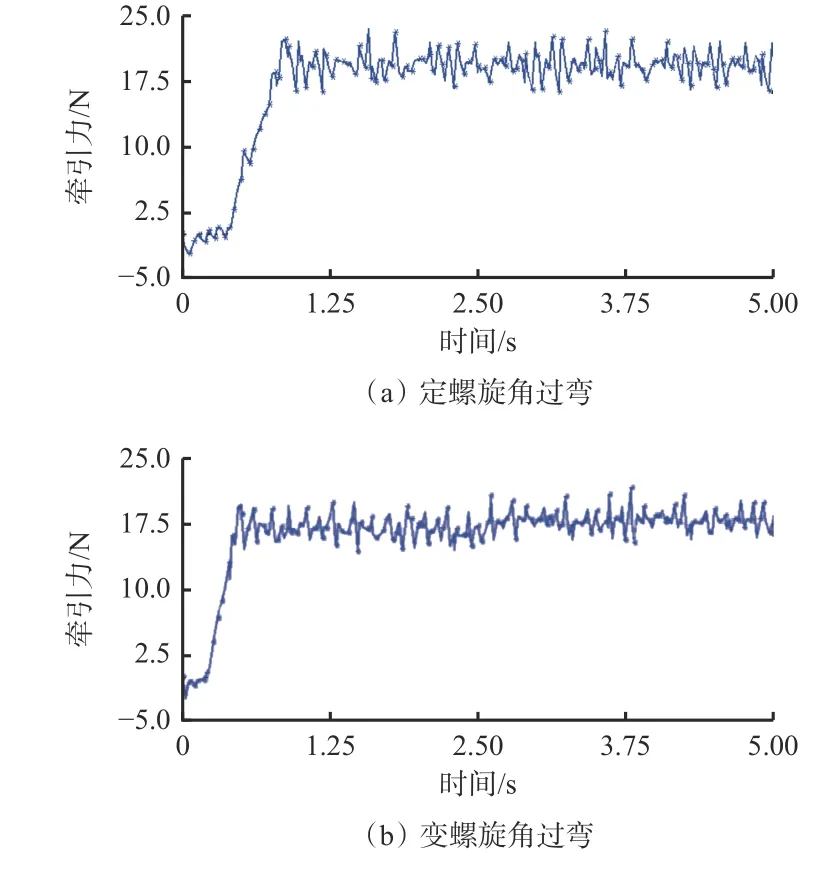
圖13 管道檢測(cè)機(jī)器人過彎時(shí)牽引力仿真結(jié)果Fig. 13 Simulation results of traction force during mine pipeline inspection robot bending
3.3 法向力對(duì)牽引力的影響
管道檢測(cè)機(jī)器人的3 組支撐輪以周向間隔120°布置,管道內(nèi)壁對(duì)每個(gè)支撐輪產(chǎn)生一個(gè)法向力。法向力過大會(huì)使機(jī)器人產(chǎn)生過多功耗,過小會(huì)導(dǎo)致機(jī)器人驅(qū)動(dòng)輪無法與管道內(nèi)壁產(chǎn)生足夠摩擦力。設(shè)定管道內(nèi)無運(yùn)輸介質(zhì),材質(zhì)為有機(jī)玻璃,靜摩擦因數(shù)為0.2,動(dòng)摩擦因數(shù)為0.15,仿真時(shí)間為10 s。根據(jù)2.1 節(jié)分析可知,機(jī)器人在40°螺旋角和100 N 法向力時(shí)具有較大牽引力。設(shè)定螺旋角為40°,其他參數(shù)為定值,法向力分別為100,110,120,130 N,機(jī)器人牽引力仿真結(jié)果如圖14 所示。可看出4 種法向力下牽引力分別為33,36,38,38 N,均大于牽引力設(shè)計(jì)需求30 N。驅(qū)動(dòng)輪的牽引力隨法向力增大而增大,當(dāng)法向力增大到一定值時(shí),牽引力趨于穩(wěn)定。為了保證機(jī)器人在管道內(nèi)平穩(wěn)運(yùn)行,且具有較小功耗,可將法向力控制在100~120 N。
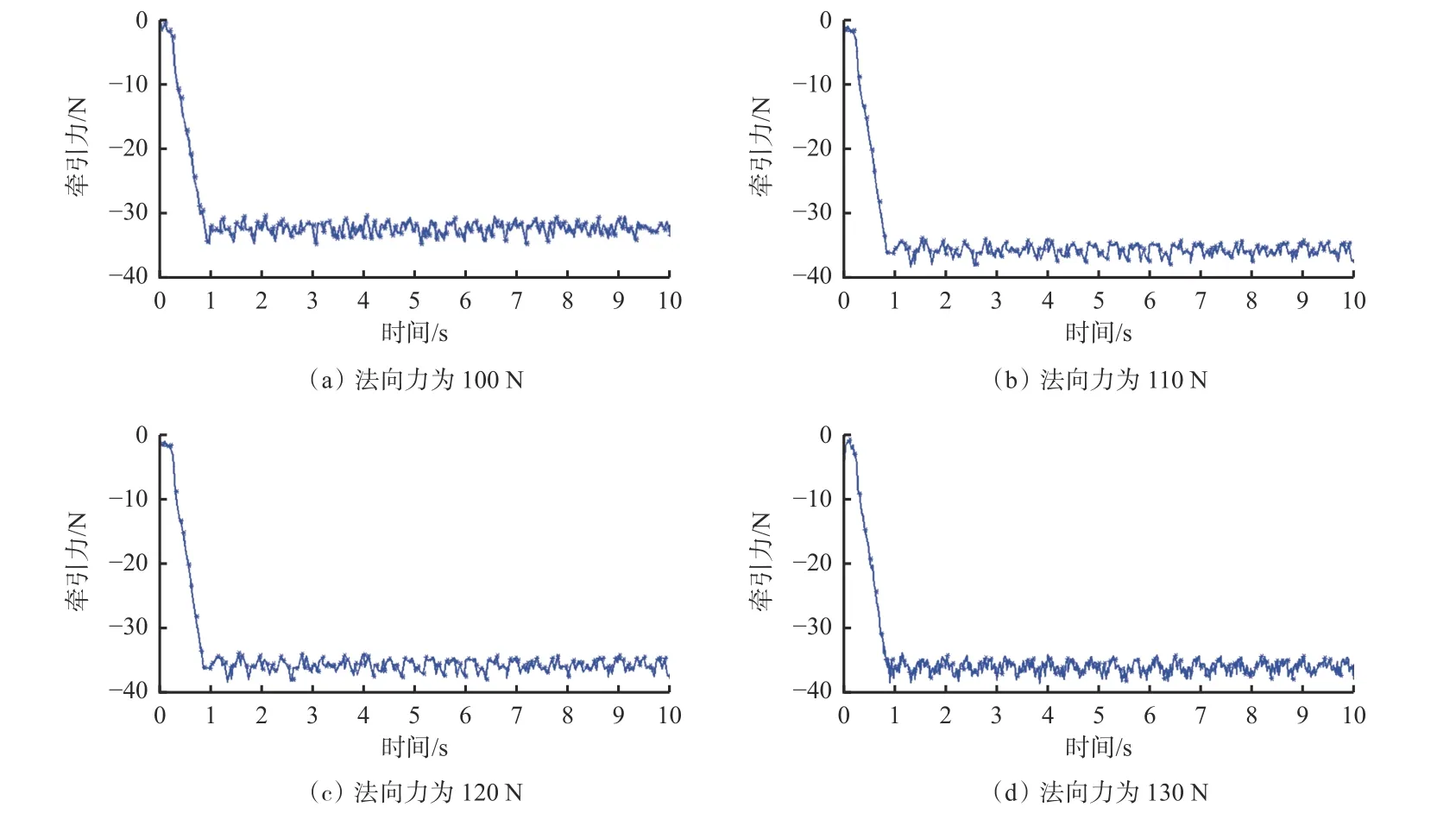
圖14 不同法向力下管道檢測(cè)機(jī)器人牽引力仿真結(jié)果Fig. 14 Traction force simulation results of mine pipeline inspection robot under different normal forces
4 機(jī)器人牽引性能測(cè)試
為了測(cè)試管道檢測(cè)機(jī)器人的牽引性能,搭建機(jī)器人牽引力測(cè)試平臺(tái),組裝實(shí)物樣機(jī),如圖15 所示。機(jī)器人驅(qū)動(dòng)電動(dòng)機(jī)采用42 系列電動(dòng)機(jī),其最大轉(zhuǎn)速為100 rad/min。測(cè)試平臺(tái)主要由上位機(jī)、機(jī)器人升降平臺(tái)、有機(jī)玻璃管道、鋼管等組成。通過機(jī)器人升降平臺(tái)使機(jī)器人對(duì)接不同材質(zhì)的管道,分別為有機(jī)玻璃管道(干)、有機(jī)玻璃管道(濕)、鋼管(干)、鋼管(濕)。彈簧一端連接機(jī)器人,另一端連接SBT630 壓力傳感器。機(jī)器人開始工作后,牽引力數(shù)據(jù)通過壓力傳感器上傳至上位機(jī)測(cè)力軟件進(jìn)行實(shí)時(shí)顯示。上位機(jī)控制機(jī)器人螺旋角變化及中心電動(dòng)機(jī)壓縮彈簧量,壓力傳感器采集驅(qū)動(dòng)輪與管道內(nèi)壁的正壓力并發(fā)送至上位機(jī)界面進(jìn)行顯示。

圖15 管道檢測(cè)機(jī)器人牽引力測(cè)試平臺(tái)Fig. 15 Test platform of traction force of mine pipeline inspection robot
選取鋼管和有機(jī)玻璃管道作為測(cè)試管道,涂抹工業(yè)潤(rùn)滑油來模擬實(shí)際運(yùn)輸介質(zhì)。設(shè)計(jì)2 組正交實(shí)驗(yàn),研究因素A 為螺旋角,因素B 為法向力,因素C 為管道工況。設(shè)驅(qū)動(dòng)電動(dòng)機(jī)轉(zhuǎn)矩為10 N·m。測(cè)試組1 以固定法向力100 N 進(jìn)行測(cè)試,研究螺旋角和管道工況對(duì)牽引力的影響;測(cè)試組2 為鋼管(干)工況,研究螺旋角和法向力對(duì)牽引力的影響。
測(cè)試組1 測(cè)試結(jié)果如圖16 所示。可看出隨著螺旋角增大,牽引力先增大后減小,與理論分析結(jié)果基本相符。在螺旋角較小(10~30°)時(shí),管壁不能提供足夠摩擦力,驅(qū)動(dòng)輪與管道內(nèi)壁存在側(cè)向力,機(jī)器人運(yùn)行時(shí)螺旋角小于設(shè)定值,驅(qū)動(dòng)輪發(fā)生滑移,導(dǎo)致機(jī)器人運(yùn)行不平穩(wěn)。隨著螺旋角增大,機(jī)器人打滑現(xiàn)象逐漸消失。4 種管道工況中,機(jī)器人運(yùn)動(dòng)的最佳螺旋角均不同,因此實(shí)際運(yùn)行中應(yīng)根據(jù)管道材質(zhì)設(shè)定螺旋角。機(jī)器人在鋼管(干)、有機(jī)玻璃管(干)中運(yùn)行的牽引力大于在鋼管(濕)、有機(jī)玻璃管(濕)中,可見在管道材質(zhì)相同的情況下,機(jī)器人在有運(yùn)輸介質(zhì)的管道中運(yùn)行時(shí)牽引力小于在無介質(zhì)運(yùn)輸?shù)墓艿乐羞\(yùn)行時(shí)的牽引力。

圖16 不同管道工況下機(jī)器人牽引力測(cè)試結(jié)果Fig. 16 Ttraction force test result of mine pipeline inspection robot under different pipe conditions
測(cè)試組2 中管道工況為鋼管(干),分別設(shè)定驅(qū)動(dòng)輪的法向力為100,110,120 N,記錄牽引力峰值與螺旋角的關(guān)系,如圖17 所示。可看出該管道工況下,機(jī)器人的最佳螺旋角約為40°,且隨著法向力增大,最佳螺旋角沒有顯著變化。

圖17 不同法向力下機(jī)器人牽引力測(cè)試結(jié)果Fig. 17 Traction force test results of mine pipeline inspection robot under different normal forces
選擇曲率半徑為600 mm 的彎管,測(cè)試機(jī)器人在不同電動(dòng)機(jī)轉(zhuǎn)速、不同螺旋角情況下的運(yùn)動(dòng)性能,結(jié)果見表3,其中“√”表示通過彎管,“○”表示未通過彎管。選擇變螺旋角過彎方式時(shí),機(jī)器人未出現(xiàn)明顯的停滯及波動(dòng)現(xiàn)象,順利完成過彎。選擇定螺旋角過彎方式時(shí),在螺旋角為10,20°情況下,由于機(jī)器人牽引力較小,過彎性能較差;螺旋角為30,40°時(shí)機(jī)器人具有較好的彎管通過性,未出現(xiàn)明顯的停滯現(xiàn)象;螺旋角為50,60°時(shí),機(jī)器人在低速情況下對(duì)彎管的通過性較差;螺旋角為70,90°時(shí)機(jī)器人牽引力不足,無法通過彎管。可見,變螺旋角過彎較定螺旋角過彎具有更好的通過性與穩(wěn)定性。
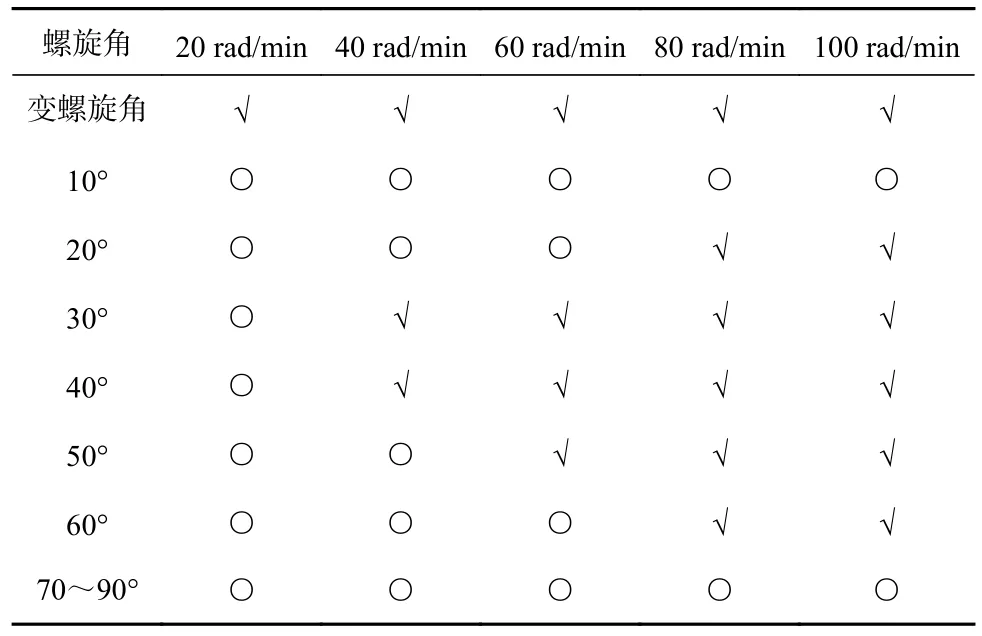
表3 管道檢測(cè)機(jī)器人過彎測(cè)試結(jié)果Table 3 Test results of mine pipeline inspection robot bending
5 結(jié)論
1) 設(shè)計(jì)了一種螺旋式礦用管道檢測(cè)機(jī)器人,構(gòu)建了力學(xué)模型,并通過動(dòng)力學(xué)仿真探討了機(jī)器人的牽引性能。研究結(jié)果表明,牽引力與法向力、螺旋角、驅(qū)動(dòng)輪與管道接觸情況、管道材質(zhì)密切相關(guān)。在較小的螺旋角范圍(10~30°)內(nèi),機(jī)器人容易出現(xiàn)打滑現(xiàn)象。隨著螺旋角增大,打滑現(xiàn)象逐漸減少,牽引力呈先增大后減小趨勢(shì),當(dāng)螺旋角達(dá)到90°時(shí),牽引力為0。
2) 機(jī)器人在不同材質(zhì)的管道中運(yùn)行時(shí)最佳螺旋角不同,因此實(shí)際運(yùn)行時(shí)需根據(jù)管道材質(zhì)設(shè)置螺旋角。在相同材質(zhì)的管道中,無介質(zhì)運(yùn)輸情況下機(jī)器人的牽引力明顯高于有介質(zhì)運(yùn)輸情況。
3) 在相同的工況下,通過調(diào)整驅(qū)動(dòng)輪的法向力可以改變機(jī)器人的牽引力。牽引力隨著法向力增大而增大。當(dāng)法向力發(fā)生變化時(shí),最佳螺旋角沒有明顯變化。
4) 變螺旋角過彎時(shí),機(jī)器人主動(dòng)控制螺旋角隨螺旋運(yùn)動(dòng)單元轉(zhuǎn)動(dòng)以正弦式規(guī)律變化,使得管道內(nèi)側(cè)的螺旋角小于外側(cè)。采用變螺旋角過彎方式時(shí)機(jī)器人在彎管內(nèi)具備良好的通過性和穩(wěn)定性。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48