基于北斗的重載鐵路列控系統(tǒng)新增功能測(cè)試方法
2024-02-27 09:33:46史立柱
鐵路通信信號(hào)工程技術(shù) 2024年2期
關(guān)鍵詞:設(shè)備
史立柱
(國(guó)能新朔準(zhǔn)池鐵路(山西)有限責(zé)任公司,山西朔州 036002)
1 概述
重載鐵路是承擔(dān)大型貨物或原材料運(yùn)輸?shù)蔫F路,具有列車(chē)總重大、行車(chē)密度大和運(yùn)量大的特點(diǎn),其在鐵路運(yùn)輸中占有重要地位,并在推動(dòng)國(guó)民經(jīng)濟(jì)發(fā)展中也起到了至關(guān)重要的作用。隨著國(guó)內(nèi)鐵路建設(shè)的快速發(fā)展,為列車(chē)運(yùn)行控制系統(tǒng)對(duì)列車(chē)運(yùn)行速度、運(yùn)行效率與安全性等也提出更高的要求。
基于北斗的普速鐵路列控系統(tǒng)在既有信號(hào)設(shè)備(聯(lián)鎖、軌道電路、LKJ)基礎(chǔ)上,增加列車(chē)自動(dòng)防護(hù)(ATP)系統(tǒng)、列車(chē)輔助駕駛設(shè)備、數(shù)據(jù)管理控制設(shè)備、臨時(shí)限速服務(wù)器(TSRS)設(shè)備、以及應(yīng)答器組,打造最高安全等級(jí)(SIL4級(jí))的列車(chē)運(yùn)行控制系統(tǒng)。系統(tǒng)結(jié)構(gòu)示意如圖1所示。
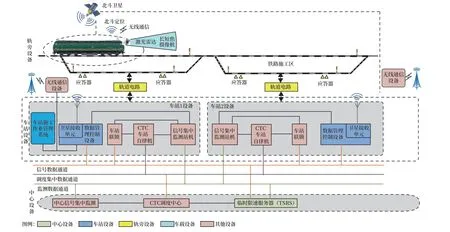
圖1 系統(tǒng)結(jié)構(gòu)示意Fig.1 Schematic diagram of system structure
基于北斗的重載鐵路列控系統(tǒng)主要功能包括列車(chē)占用檢查、安全防護(hù)距離、軌道電路發(fā)碼、應(yīng)答器設(shè)置、臨時(shí)限速命令管理、控車(chē)轉(zhuǎn)換、列車(chē)多源融合定位與測(cè)速測(cè)距、衛(wèi)星定位及短報(bào)文通信等。
系統(tǒng)采用基于北斗的多源融合技術(shù)實(shí)現(xiàn)列車(chē)主動(dòng)精準(zhǔn)定位,通過(guò)無(wú)線通信網(wǎng)絡(luò)實(shí)現(xiàn)線路數(shù)據(jù)(含限速信息)車(chē)-地信息傳輸。軌道電路實(shí)現(xiàn)列車(chē)占用檢查并提供行車(chē)許可,車(chē)載設(shè)備計(jì)算目標(biāo)距離連續(xù)速度模式曲線,監(jiān)控列車(chē)安全運(yùn)行[1-4]。
基于北斗的重載鐵路列控系統(tǒng)與傳統(tǒng)列控系統(tǒng)相比,最大的區(qū)別在于無(wú)線網(wǎng)絡(luò)的覆蓋范圍。傳統(tǒng)CTCS-3級(jí)列控系統(tǒng)的無(wú)線覆蓋全線,列車(chē)在正常工作狀態(tài)下的運(yùn)行過(guò)程中始終與地面無(wú)線閉塞中心設(shè)備保持無(wú)線通信會(huì)話建立狀態(tài),以獲得實(shí)時(shí)的移動(dòng)授權(quán),控制列車(chē)安全運(yùn)行。基于北斗的重載鐵路列控系統(tǒng)僅在站內(nèi)覆蓋了無(wú)線網(wǎng)絡(luò),當(dāng)列車(chē)運(yùn)行至區(qū)間時(shí)將通過(guò)站內(nèi)提前發(fā)送的區(qū)間線路數(shù)據(jù)等信息,結(jié)合區(qū)間軌道電路狀態(tài)保證列車(chē)安全運(yùn)行。由于重載鐵路一般存在全線基礎(chǔ)設(shè)施改造困難、線路里程長(zhǎng)等特點(diǎn),使用這種列控方案能顯著降低建設(shè)成本和后期的運(yùn)營(yíng)維護(hù)難度。根據(jù)上述新特點(diǎn),針對(duì)基于北斗的重載鐵路列控系統(tǒng)中各設(shè)備的功能特點(diǎn)的測(cè)試驗(yàn)證以及工程數(shù)據(jù)測(cè)試等工作提出了新的要求和挑戰(zhàn)[5-7]。
2 基于北斗的重載鐵路列控系統(tǒng)
在車(chē)站覆蓋無(wú)線網(wǎng)絡(luò)情況下,該系統(tǒng)由CTC、計(jì)算機(jī)聯(lián)鎖(Computer Based Interlocking,CBI)、TSRS、車(chē)站數(shù)據(jù)管理控制設(shè)備、列車(chē)自動(dòng)防護(hù)系統(tǒng)以及車(chē)站無(wú)線網(wǎng)絡(luò)系統(tǒng)組成。該系統(tǒng)中地面的數(shù)據(jù)管理控制設(shè)備負(fù)責(zé)和列車(chē)建立通信會(huì)話,當(dāng)列車(chē)在站內(nèi)時(shí)通過(guò)無(wú)線網(wǎng)絡(luò)與車(chē)載設(shè)備實(shí)現(xiàn)雙向通信,并根據(jù)列車(chē)位置信息實(shí)現(xiàn)列車(chē)管理;通過(guò)以太網(wǎng)與計(jì)算機(jī)聯(lián)鎖、TSRS通信,根據(jù)進(jìn)路、道岔、信號(hào)機(jī)狀態(tài)和TSRS下達(dá)的臨時(shí)限速信息計(jì)算列車(chē)運(yùn)行路徑下的線路信息和臨時(shí)限速信息,實(shí)時(shí)生成無(wú)線報(bào)文消息,并通過(guò)無(wú)線網(wǎng)絡(luò)向車(chē)載設(shè)備發(fā)送線路信息及臨時(shí)限速信息。當(dāng)列車(chē)運(yùn)行至區(qū)間時(shí)通過(guò)北斗短報(bào)文通信方式與車(chē)載設(shè)備進(jìn)行應(yīng)急通信,接收車(chē)載設(shè)備發(fā)送的線路數(shù)據(jù)校驗(yàn)請(qǐng)求信息,并將線路數(shù)據(jù)校驗(yàn)結(jié)果通過(guò)北斗短報(bào)文方式發(fā)送給車(chē)載設(shè)備。
3 新增測(cè)試內(nèi)容分析
通過(guò)對(duì)新增列控設(shè)備的功能特點(diǎn),以及特定功能驗(yàn)證的分析,需要在無(wú)線網(wǎng)絡(luò)覆蓋邊界點(diǎn)測(cè)試、臨時(shí)限速邊界測(cè)試、列車(chē)特殊控車(chē)模式、區(qū)間應(yīng)急通信等方面的測(cè)試方法進(jìn)行詳細(xì)設(shè)計(jì)。
3.1 車(chē)站覆蓋無(wú)線網(wǎng)絡(luò)邊界點(diǎn)測(cè)試
在車(chē)站無(wú)線網(wǎng)絡(luò)覆蓋范圍內(nèi),列車(chē)接收到車(chē)站數(shù)據(jù)管理控制設(shè)備發(fā)送的列車(chē)運(yùn)行前方臨時(shí)限速信息、線路信息后,以不引起列車(chē)制動(dòng)為最小原則,同時(shí)考慮列車(chē)與車(chē)站控制設(shè)備通信容忍安全余量。需要針對(duì)車(chē)站覆蓋無(wú)線網(wǎng)絡(luò)的L無(wú)線覆蓋值進(jìn)行測(cè)試。
如圖2所示,測(cè)試前提應(yīng)使列車(chē)在進(jìn)入L無(wú)線覆蓋起點(diǎn)4097信號(hào)機(jī)前,排列A站的通過(guò)進(jìn)路,同時(shí)確保列車(chē)在4097信號(hào)機(jī)前的列車(chē)速度達(dá)到列車(chē)最高允許運(yùn)行速度。觀察列車(chē)在與車(chē)站控制設(shè)備建立通信的最大允許鏈接時(shí)間內(nèi)完成建鏈時(shí),列車(chē)不降速運(yùn)行并通過(guò)A站。

圖2 車(chē)站無(wú)線網(wǎng)絡(luò)覆蓋區(qū)示意Fig.2 Schematic diagram of station wireless network coverage area
3.2 臨時(shí)限速范圍邊界點(diǎn)測(cè)試
當(dāng)列車(chē)出站后,接收到車(chē)站控制設(shè)備發(fā)送的臨時(shí)限速信息,車(chē)站控制設(shè)備管轄的臨時(shí)限速范圍,以在列車(chē)與下一個(gè)相鄰車(chē)站的車(chē)站控制設(shè)備建立連接時(shí),列車(chē)前方臨時(shí)限速信息不引起列車(chē)制動(dòng)為基本原則。考慮車(chē)站控制設(shè)備設(shè)計(jì)為管轄單個(gè)車(chē)站,因此,以上一相鄰站反向進(jìn)站信號(hào)機(jī)作為臨時(shí)限速管轄左邊界,以下一相鄰正向進(jìn)站信號(hào)機(jī)作為臨時(shí)限速管轄右邊界,作為車(chē)站控制設(shè)備的臨時(shí)限速管轄范圍。
1)無(wú)線覆蓋范圍內(nèi)的臨時(shí)限速邊界點(diǎn)測(cè)試
如圖3所示,在A站管轄范圍末端(B站X進(jìn)站信號(hào)機(jī))左右兩側(cè)分別設(shè)置臨時(shí)限速TSR-1和TSR-2。當(dāng)列車(chē)在A站無(wú)線管轄范圍內(nèi),A站的車(chē)站數(shù)據(jù)管理控制設(shè)備僅會(huì)將TSR-1限速命令發(fā)送給車(chē)輛。當(dāng)列車(chē)運(yùn)行至B站無(wú)線管轄范圍內(nèi),且與B站的車(chē)站數(shù)據(jù)管理控制設(shè)備注冊(cè)成功時(shí),應(yīng)能同時(shí)收到由B站的車(chē)站數(shù)據(jù)管理控制設(shè)備發(fā)送的TSR-1與TSR-2的臨時(shí)限速命令。

圖3 臨時(shí)限速區(qū)管轄范圍示意Fig.3 Schematic diagram of jurisdiction of temporary speed restriction zone
2)無(wú)線覆蓋范圍外的臨時(shí)限速邊界測(cè)試
如圖4所示,當(dāng)列車(chē)處于A站無(wú)線覆蓋范圍內(nèi)時(shí),在A站管轄范圍末端(B站X進(jìn)站信號(hào)機(jī))設(shè)置臨時(shí)限速TSR-1。A站的車(chē)站數(shù)據(jù)管理控制設(shè)備僅會(huì)將TSR-1限速命令發(fā)送給車(chē)輛。
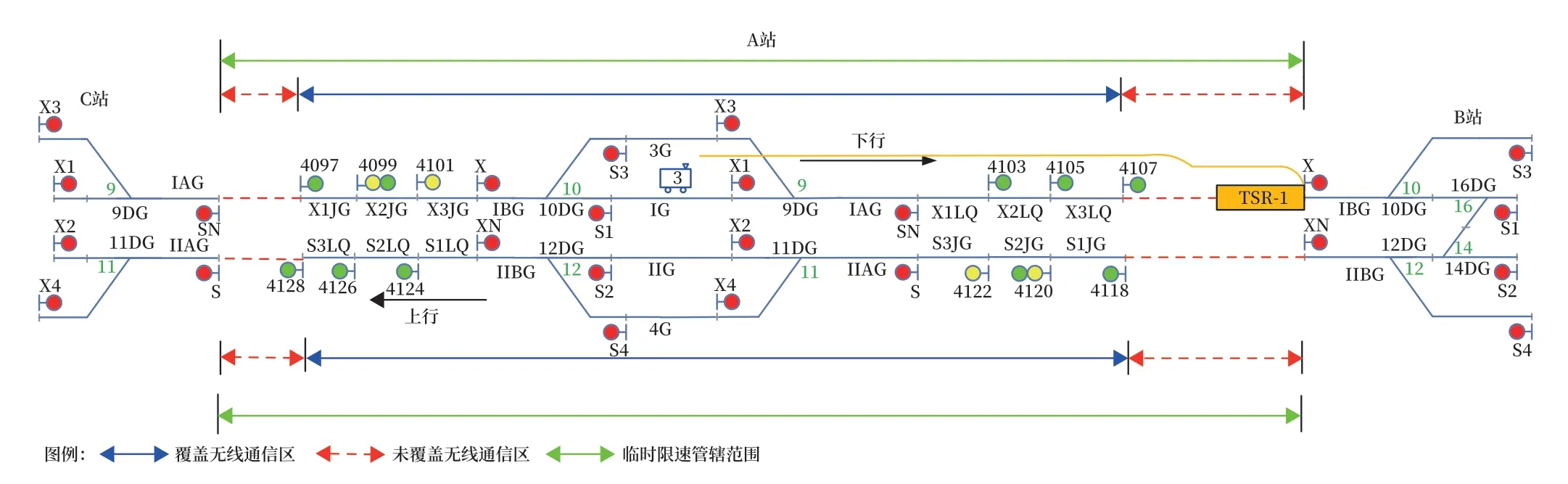
圖4 無(wú)線覆蓋范圍邊界臨時(shí)限速測(cè)試示意1Fig.4 Schematic Diagram No.1 of temporary speed restriction test for the wireless coverage boundary
如圖5所示,當(dāng)列車(chē)越過(guò)A站無(wú)線覆蓋范圍4107信號(hào)機(jī),且與A站車(chē)站數(shù)據(jù)管理控制設(shè)備完成注銷(xiāo)后,在A站管轄范圍末端(B站X進(jìn)站信號(hào)機(jī))設(shè)置臨時(shí)限速TSR-1。列車(chē)將無(wú)法收到臨時(shí)限速TSR-1。因此要求調(diào)度員在下達(dá)區(qū)間臨時(shí)限速時(shí),確保該區(qū)間內(nèi)無(wú)列車(chē)運(yùn)行。

圖5 無(wú)線覆蓋范圍邊界臨時(shí)限速測(cè)試示意2Fig.5 Schematic Diagram No.2 of temporary speed restriction test for the wireless coverage boundary
3.3 臨時(shí)限速功能故障測(cè)試
1)臨時(shí)限速移交站通信故障
當(dāng)列車(chē)A站出發(fā)后,列車(chē)使用A站預(yù)告發(fā)送的臨時(shí)限速進(jìn)行控制運(yùn)行,當(dāng)列車(chē)在進(jìn)入B站建鏈范圍內(nèi),若未能與B站建立通信更新臨時(shí)限速信息,為確保行車(chē)安全,列車(chē)應(yīng)該在A站往B站方向的臨時(shí)限速管轄范圍末端停車(chē)后轉(zhuǎn)入人工模式,由司機(jī)按照相關(guān)無(wú)限速下的安全行駛速度要求駕駛列車(chē)進(jìn)站。
2)區(qū)間通信故障
當(dāng)列車(chē)A站出發(fā)后,列車(chē)使用A站預(yù)告發(fā)送的臨時(shí)限速進(jìn)行控制運(yùn)行,當(dāng)列車(chē)尚未進(jìn)入B站建鏈范圍內(nèi),且在進(jìn)入?yún)^(qū)間無(wú)線覆蓋盲區(qū)后無(wú)法通過(guò)應(yīng)急通信方式與A站進(jìn)行連接,為確保行車(chē)安全,此時(shí)列車(chē)應(yīng)該停車(chē)后轉(zhuǎn)入人工模式,由司機(jī)按照相關(guān)無(wú)限速下的安全行駛速度要求駕駛列車(chē)在區(qū)間運(yùn)行。
3.4 列車(chē)特殊控車(chē)模式
為保證重載鐵路既有機(jī)車(chē)控制設(shè)備在跨制式運(yùn)行及區(qū)間故障模式下與基于北斗的重載鐵路列控系統(tǒng)間的互通性,在測(cè)試過(guò)程中也需要重點(diǎn)對(duì)區(qū)間信號(hào)故障降級(jí)模式下的走停走功能及ATP與LKJ不停車(chē)切換功能進(jìn)行專(zhuān)項(xiàng)測(cè)試。
1)走停走功能測(cè)試
機(jī)車(chē)牽引的列車(chē)運(yùn)行至自動(dòng)閉塞區(qū)間通過(guò)信號(hào)機(jī)前,車(chē)載設(shè)備收到地面發(fā)送HU碼時(shí),停車(chē)持續(xù)時(shí)間超過(guò)2 min,司機(jī)選擇“解鎖”并確認(rèn)后,解除停車(chē)控制轉(zhuǎn)為走停走模式,并以20 km/h監(jiān)控列車(chē)越過(guò)該信號(hào)機(jī)直至次一架信號(hào)機(jī),如圖6所示。測(cè)試應(yīng)對(duì)停車(chē)持續(xù)時(shí)間2 min以內(nèi)及2 min以外分別設(shè)置前置條件,對(duì)地面收HU碼或其他碼序分別設(shè)置前置條件,并對(duì)模式轉(zhuǎn)換后列車(chē)運(yùn)行速度是否按照20 km/h進(jìn)行相應(yīng)測(cè)試。

圖6 走停走測(cè)試示意Fig.6 Schematic diagram of go-stop-go test
2)與LKJ不停車(chē)切換測(cè)試
車(chē)載ATP設(shè)備在通常模式(FS)控制列車(chē)運(yùn)行時(shí),收到轉(zhuǎn)入LKJ控車(chē)的預(yù)告應(yīng)答器信息,通過(guò)DMI提示司機(jī)前方將切換至LKJ控車(chē)。車(chē)載ATP設(shè)備接收到LKJ回復(fù)的控車(chē)狀態(tài)后,將控車(chē)權(quán)切換至LKJ,車(chē)載ATP設(shè)備進(jìn)入后臺(tái)工作,在通過(guò)切換應(yīng)答器后,通過(guò)DMI提示司機(jī)已切換至LKJ控車(chē)。切換場(chǎng)景如圖7所示。

圖7 ATP切換LKJ測(cè)試示意Fig.7 Schematic diagram of the test about ATP switching to LKJ
因此,測(cè)試方法中需要針對(duì)LKJ的切換條件前置模式的預(yù)置,可通過(guò)環(huán)境注入報(bào)文的方式,復(fù)用圖示中的信號(hào)機(jī)2837外方500 m處布置的一組無(wú)源應(yīng)答器作為預(yù)告應(yīng)答器,在出站信號(hào)機(jī)2797外方1 000 m處布置一組應(yīng)答器作為切換應(yīng)答器。在整個(gè)切換過(guò)程中關(guān)注ATP與LKJ之間在預(yù)告及切換下的消息交互環(huán)節(jié),以及最終控制模式進(jìn)行重點(diǎn)功能驗(yàn)證。
3.5 區(qū)間應(yīng)急通信
由于列車(chē)運(yùn)行至區(qū)間后,存在一定范圍的無(wú)線覆蓋盲區(qū)。因此當(dāng)車(chē)載設(shè)備在此區(qū)域內(nèi)出現(xiàn)故障,將導(dǎo)致列車(chē)降級(jí)運(yùn)行或停車(chē)。當(dāng)車(chē)載設(shè)備故障恢復(fù)后,需要對(duì)車(chē)載設(shè)備內(nèi)存儲(chǔ)的線路數(shù)據(jù)與當(dāng)前實(shí)際的數(shù)據(jù)進(jìn)行校驗(yàn),以使其快速投入正常的工作模式。車(chē)載設(shè)備將連接北斗衛(wèi)星導(dǎo)航系統(tǒng),啟動(dòng)故障恢復(fù)程序,通過(guò)北斗短報(bào)文的通信方式與數(shù)據(jù)管理控制設(shè)備進(jìn)行通信交互。
針對(duì)區(qū)間內(nèi)有數(shù)據(jù)變化和無(wú)數(shù)據(jù)變化進(jìn)行分別的測(cè)試驗(yàn)證設(shè)計(jì)。
1) 數(shù)據(jù)無(wú)變化
如圖8所示,列車(chē)由A站發(fā)車(chē)時(shí),在無(wú)線覆蓋盲區(qū)內(nèi)設(shè)置一處臨時(shí)限速TSR-1,當(dāng)列車(chē)運(yùn)行至無(wú)線覆蓋盲區(qū)后,未到達(dá)臨時(shí)限速TSR-1起點(diǎn)位置時(shí),將車(chē)載設(shè)備重啟。此時(shí)車(chē)載設(shè)備恢復(fù)工作后,將通過(guò)北斗衛(wèi)星采用短報(bào)文通信方式與A站數(shù)據(jù)管理控制設(shè)備進(jìn)行數(shù)據(jù)交互。此時(shí)由于區(qū)間內(nèi)未發(fā)生數(shù)據(jù)變化,車(chē)載設(shè)備將根據(jù)數(shù)據(jù)校驗(yàn)結(jié)果信息判斷已存儲(chǔ)的線路信息有效,使用線路信息計(jì)算控車(chē)曲線,列車(chē)進(jìn)入通常模式,恢復(fù)正常運(yùn)行。列車(chē)將正常處理TSR-1的臨時(shí)限速命令。

圖8 區(qū)間數(shù)據(jù)無(wú)變化示意Fig.8 Schematic diagram of no data change in the section
2) 數(shù)據(jù)有變化
如圖9所示,列車(chē)由A站發(fā)車(chē)時(shí),在無(wú)線覆蓋盲區(qū)內(nèi)設(shè)置一處臨時(shí)限速TSR-1,當(dāng)列車(chē)運(yùn)行至無(wú)線覆蓋盲區(qū)后,未到達(dá)臨時(shí)限速TSR-1起點(diǎn)位置時(shí),將車(chē)載設(shè)備重啟。此時(shí)在B站進(jìn)站信號(hào)機(jī)外方設(shè)置TSR-2,車(chē)載設(shè)備恢復(fù)工作后,將通過(guò)北斗衛(wèi)星采用短報(bào)文通信方式與A站數(shù)據(jù)管理控制設(shè)備進(jìn)行數(shù)據(jù)交互。由于區(qū)間內(nèi)發(fā)生數(shù)據(jù)變化,車(chē)載設(shè)備將根據(jù)數(shù)據(jù)校驗(yàn)結(jié)果信息判斷已存儲(chǔ)的線路信息無(wú)效,使用最低運(yùn)行速度控制列車(chē)運(yùn)行至B站無(wú)線覆蓋范圍后,再投入正常運(yùn)行。

圖9 區(qū)間數(shù)據(jù)有變化示意Fig.9 Schematic diagram of data change in the section
4 結(jié)束語(yǔ)
本文研究了基于北斗的重載鐵路列控系統(tǒng)新增功能及接口,完成了相關(guān)測(cè)試方法設(shè)計(jì)。針對(duì)不具備全線覆蓋無(wú)線網(wǎng)絡(luò)的重載鐵路,實(shí)施有針對(duì)性的列控系統(tǒng)功能測(cè)試方法,對(duì)未來(lái)推動(dòng)重載鐵路升級(jí)改造及功能驗(yàn)證提供了可行的解決方案。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
IT時(shí)代周刊(2015年8期)2015-11-11 05:50:37
汽車(chē)維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00