多層可延展柔性電路互連結(jié)構(gòu)優(yōu)化*
2024-02-24 03:55:20張烈平彭忠全
傳感器與微系統(tǒng) 2024年2期
張 鑫,張烈平,唐 滔,張 明,彭忠全
(1.桂林理工大學(xué) 機(jī)械與控制工程學(xué)院,廣西 桂林 541006;2.大連交通大學(xué) 軟件學(xué)院,遼寧 大連 116021;3.江西應(yīng)用科技學(xué)院 人工智能學(xué)院,江西 南昌 330100)
0 引言
近年來,新材料、器件設(shè)計(jì)、制造工藝、裝配工藝等領(lǐng)域的發(fā)展,為柔性可延展電子的研發(fā)提供了許多新的策略,使得柔性電子領(lǐng)域出現(xiàn)了爆炸式的增長(zhǎng)[1]。柔性電子通常是以超薄高彈性的有機(jī)聚合物作為基底,內(nèi)部通過層層疊加的方式嵌入各種功能模塊。為了實(shí)現(xiàn)可延展特性,內(nèi)部結(jié)構(gòu)通常設(shè)計(jì)為島橋結(jié)構(gòu)。將電子器件安放于島上,各個(gè)島之間通過蛇形導(dǎo)線相互連接[2,3]。因其能夠在三維空間中實(shí)現(xiàn)彎曲扭轉(zhuǎn)變形,可將其直接貼附于皮膚表面或植入人體實(shí)現(xiàn)人體生理參數(shù)測(cè)量、疾病預(yù)防等功能[4~6],在生命健康監(jiān)測(cè)領(lǐng)域呈現(xiàn)出巨大的應(yīng)用前景。
提高柔性電子穿戴舒適性是柔性電子系統(tǒng)設(shè)計(jì)的重要要求[7]。為了消除剛性器件與皮膚界面之間的力學(xué)差異,提高穿戴舒適性,了解表皮電子器件與皮膚之間的物理耦合至關(guān)重要[8]。近年來研究人員提出了不同的方法降低皮膚界面受力大小。文獻(xiàn)[9]通過將電子層封裝于不同模量的材料中形成核殼結(jié)構(gòu)并優(yōu)化核殼的厚度有效降低了柔性系統(tǒng)對(duì)皮膚的約束感。文獻(xiàn)[10,11]通過在電子層下方嵌入離子液體層為電子層和皮膚之間提供了應(yīng)變隔離,這種封裝結(jié)構(gòu)極大地降低了皮膚界面應(yīng)力。
上述均是通過改變封裝結(jié)構(gòu)減小皮膚界面應(yīng)力,通過改變封裝的方法固然能提高穿戴舒適性,但其制作工藝較復(fù)雜,制作成功率較低,制作成本過高,且上述研究均集中于單層結(jié)構(gòu)的研究,由于單層的可延展柔性電路限制了系統(tǒng)的集成度,從而無法完成復(fù)雜的測(cè)量任務(wù),為此黃振龍等人[12,13]研發(fā)出一種用于制備多層柔性可延展電路工藝,通過在不同電子層之間構(gòu)建垂直互連通孔(vertical interconnect access,VIA)實(shí)現(xiàn)不同層之間的電信號(hào)連接,而由于VIA的存在會(huì)對(duì)皮膚舒適性產(chǎn)生影響,文獻(xiàn)[14]通過參數(shù)對(duì)比的方式研究了VIA大小對(duì)皮膚舒適性的影響,得出在皮膚拉伸率一定的條件下,皮膚界面應(yīng)力與VIA 成正相關(guān)的結(jié)論。這種優(yōu)化方法效率低,且優(yōu)化結(jié)果不能保證為最優(yōu)參數(shù),同時(shí)忽略了導(dǎo)線焊盤對(duì)皮膚舒適性的影響。
本文將綜合考慮研究VIA及導(dǎo)線焊盤大小對(duì)舒適性的影響,為電路印刷電路板(printed circuit board,PCB)設(shè)計(jì)提供一定的理論指導(dǎo)。
1 基于皮膚舒適性的多層可延展柔性電路有限元分析
1.1 基于皮膚舒適性的多層可延展柔性電路參數(shù)化建模
本文基于Ansys Workbench 平臺(tái)SpaceClaim 模塊建立皮膚舒適性模型如圖1 所示。該模型主要分為2 個(gè)部分,分別為柔性可延展電路系統(tǒng)和皮膚。其中柔性可延展電路系統(tǒng)分為頂層電路和底層電路2 部分,每層電路有一段蛇形導(dǎo)線,兩導(dǎo)線之間通過VIA相互連接并封裝于超彈性材料硅膠(Ecoflex)中。模型尺寸以實(shí)際光刻工藝精度為參考,其中蛇形導(dǎo)線內(nèi)半徑為0.15 mm,外半徑為0.3 mm,厚度為0.02 mm,每層Ecoflex 封裝長(zhǎng)10 mm,寬1.5 mm,厚0.1 mm,皮膚長(zhǎng)10.6 mm,寬2.1 mm,厚0.8 mm。本文的研究重點(diǎn)為VIA半徑P1與導(dǎo)線焊盤半徑P2大小對(duì)皮膚舒適性的影響,因此將VIA半徑P1與導(dǎo)線焊盤半徑P2作為設(shè)計(jì)變量,為方便觀察皮膚受力情況,在VIA正下方皮膚界面添加印記面,同時(shí)為了保證結(jié)果的準(zhǔn)確性,保持印記面半徑大于VIA 與導(dǎo)線焊盤半徑,模型材料參數(shù)如表1 所示[14,15]。

圖1 皮膚舒適性結(jié)構(gòu)
1.2 皮膚界面應(yīng)力靜力學(xué)分析
在前處理操作過程中,首先將各部分賦予相應(yīng)的材料,并將皮膚印記面處的區(qū)域進(jìn)行加密處理。在接觸設(shè)置中,將皮膚與底層Ecoflex、導(dǎo)線與VIA、導(dǎo)線與Ecoflex 及各層Ecoflex之間均設(shè)置為綁定接觸,VIA與Ecoflex設(shè)置為無摩擦接觸,最終對(duì)皮膚兩端施加20%的位移載荷操作,皮膚印記面處的剪切應(yīng)力和法向應(yīng)力分布如圖2所示。
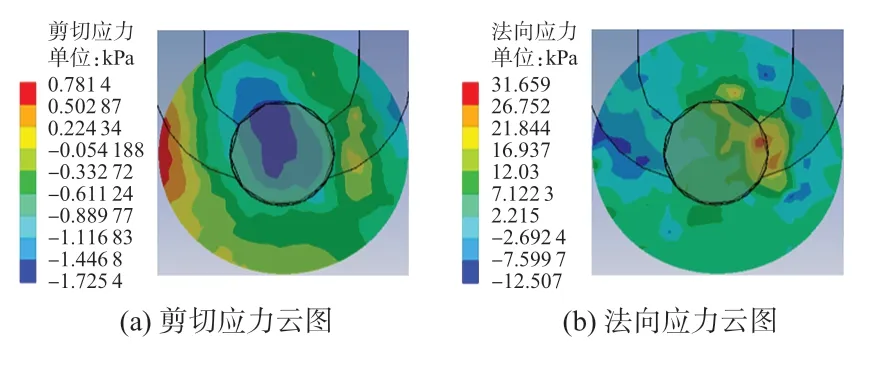
圖2 皮膚界面剪切應(yīng)力和法向應(yīng)力云圖
從圖2中可以發(fā)現(xiàn),應(yīng)力值有正負(fù)之分,當(dāng)應(yīng)力為正時(shí)表示皮膚所受拉應(yīng)力,應(yīng)力為負(fù)時(shí)表示皮膚所受壓應(yīng)力,其中,皮膚界面最大剪切應(yīng)力為1.725 4 kPa,最大法向應(yīng)力為31.659 kPa。皮膚界面應(yīng)力值是衡量皮膚舒適性的重要指標(biāo),研究表明,為了使皮膚佩戴舒適,無明顯約束感,柔性系統(tǒng)作用在皮膚上的最大應(yīng)力應(yīng)控制在20 kPa 以內(nèi)[16]。根據(jù)以上分析,皮膚界面剪切應(yīng)力滿足舒適度要求且有較大冗余,而法向應(yīng)力超過舒適度范圍要求。降低皮膚界面應(yīng)力有效方法為調(diào)整通孔與導(dǎo)線焊盤的尺寸大小,改變其參數(shù)大小是對(duì)電路模型的設(shè)計(jì)與重做,為了實(shí)現(xiàn)高效自動(dòng)化的建模與仿真,采取參數(shù)化建模的思想,將VIA和導(dǎo)線焊盤尺寸與皮膚界面應(yīng)力進(jìn)行關(guān)聯(lián),選取皮膚界面最大剪切應(yīng)力P3和最大法向應(yīng)力P4作為系統(tǒng)輸出變量,在此基礎(chǔ)上,得到關(guān)于設(shè)計(jì)變量與輸出變量之間的回歸樣本數(shù)據(jù)。
2 響應(yīng)面試驗(yàn)設(shè)計(jì)與分析
響應(yīng)面模型是利用試驗(yàn)設(shè)計(jì)法生成試驗(yàn)計(jì)劃表,將統(tǒng)計(jì)學(xué)的理論引入到優(yōu)化設(shè)計(jì)中,通過構(gòu)建擬合顯示代理模型來模擬各個(gè)設(shè)計(jì)變量與優(yōu)化目標(biāo)之間的隱士關(guān)系。優(yōu)化過程中,所有優(yōu)化的適應(yīng)度值是通過所得的響應(yīng)面模型表達(dá)式進(jìn)行計(jì)算,中間取代原來直接優(yōu)化的大量有限元計(jì)算,可在犧牲一定精度的前提下來保證計(jì)算時(shí)間和計(jì)算成本。
2.1 試驗(yàn)設(shè)計(jì)
試驗(yàn)設(shè)計(jì)(design of experiment,DOE)點(diǎn)的選擇是構(gòu)建響應(yīng)面模型的前提。它提供了一種合理而有效地獲得信息數(shù)據(jù)的方法,是當(dāng)今產(chǎn)品開發(fā)、過程優(yōu)化等環(huán)節(jié)中最重要的統(tǒng)計(jì)方法之一[17]。本文導(dǎo)線寬度為0.15 mm,同時(shí)參考了文獻(xiàn)[13]VIA范圍,設(shè)置VIA 半徑P1及導(dǎo)線焊盤半徑P2的取值范圍如表2所示。
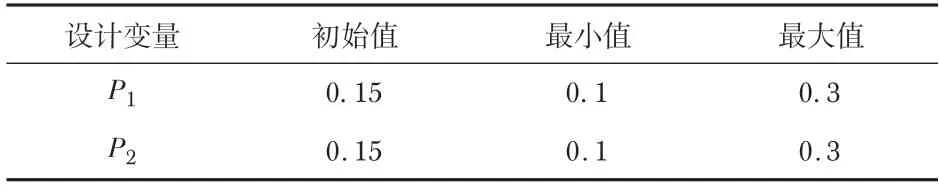
表2 設(shè)計(jì)變量的取值范圍 mm
本文選取最佳填充空間設(shè)計(jì)DOE方法,其能夠在參數(shù)空間以更加充分的取值來構(gòu)成樣本點(diǎn)空間。根據(jù)設(shè)計(jì)變量個(gè)數(shù),共生成6組樣本點(diǎn)((N +1)(N +2)/2,N為設(shè)計(jì)變量個(gè)數(shù)),生成初始樣本點(diǎn)后分別計(jì)算對(duì)應(yīng)的皮膚界面最大剪切應(yīng)力及最大法向應(yīng)力值,得到的6 組多元非線性回歸樣本數(shù)據(jù)如表3所示。
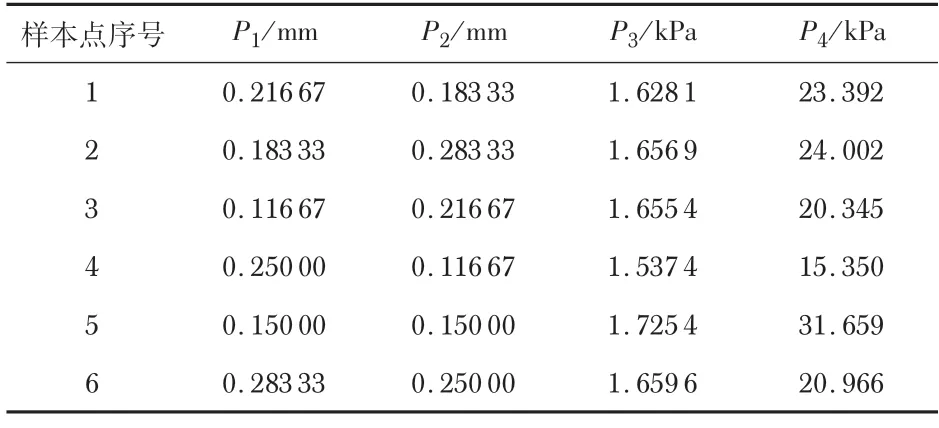
表3 多元非線性回歸樣本數(shù)據(jù)
2.2 響應(yīng)面模型的建立
通過選擇不同的響應(yīng)面類型對(duì)DOE數(shù)據(jù)點(diǎn)進(jìn)行擬合,發(fā)現(xiàn)結(jié)果較嘈雜呈現(xiàn)出非線性特點(diǎn),因此選用非參數(shù)回歸模型DOE樣本點(diǎn)建立響應(yīng)面,同時(shí)為了保證響應(yīng)面模型能夠較好地反映真實(shí)情況,需要生成驗(yàn)證點(diǎn)對(duì)其精度進(jìn)行檢驗(yàn),將偏離擬合優(yōu)度曲線的驗(yàn)證點(diǎn)設(shè)置為細(xì)化點(diǎn)以提高響應(yīng)面精度。改善后得到如圖3所示的最大剪切應(yīng)力響應(yīng)面和最大法向應(yīng)力響應(yīng)面。

圖3 最大剪切應(yīng)力和法向應(yīng)力響應(yīng)面
從圖3(a)中可以看出,當(dāng)P1為0.14 mm,P2為0.1 mm左右時(shí),皮膚所受剪切應(yīng)力較大,但仍小于皮膚舒適度閾值。從圖3(b)中可以看出,當(dāng)P1與P2均為0.14 mm左右時(shí),皮膚所受法向應(yīng)力較大,且隨著P1與P2的增加,皮膚所受法向應(yīng)力逐漸變小。響應(yīng)面擬合優(yōu)度曲線如圖4 所示,其中,橫坐標(biāo)為目標(biāo)變量的實(shí)際觀測(cè)值,縱坐標(biāo)為對(duì)應(yīng)的預(yù)測(cè)值,由圖可知,不同目標(biāo)變量的預(yù)測(cè)值隨實(shí)際觀測(cè)值呈現(xiàn)出斜率為1 的線性變化,其擬合度評(píng)價(jià)結(jié)果如表4 所示,說明響應(yīng)面擬合精度較高。

表4 響應(yīng)面擬合評(píng)價(jià)結(jié)果
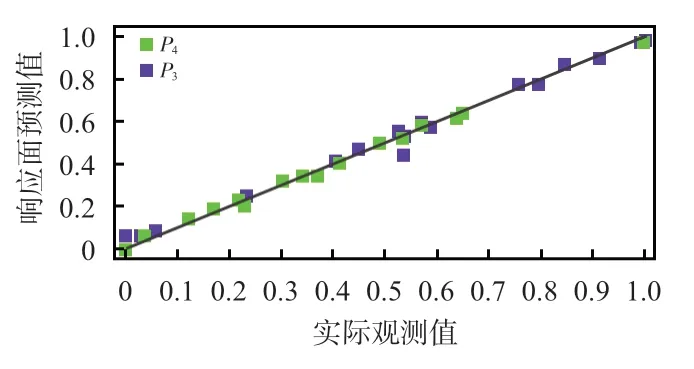
圖4 擬合優(yōu)度曲線
3 基于多目標(biāo)遺傳算法的皮膚界面應(yīng)力優(yōu)化與分析
3.1 多目標(biāo)遺傳算法
多目標(biāo)遺傳算法是最常用的遺傳算法NSGA-Ⅱ的混合變體,其具有全局搜索能力強(qiáng)、收斂性快等特點(diǎn),適合計(jì)算全局最大值或最小值[18,19]。該算法首先在定義域內(nèi)隨機(jī)生成初始種群作為染色體祖先群落,并通過對(duì)染色體進(jìn)行交叉、變異操作改變?nèi)旧w基因序列生成新的染色體群落,隨后對(duì)種群排列分類和并進(jìn)行擁擠度計(jì)算,最終通過適應(yīng)度函數(shù)對(duì)所有解進(jìn)行比較評(píng)價(jià)選擇適應(yīng)度高的個(gè)體遺傳到下一代種群中。通過不斷地演變進(jìn)化,當(dāng)滿足終止條件時(shí)所返回的解可視為問題的最優(yōu)解或次優(yōu)解。
3.2 優(yōu)化流程
本文通過響應(yīng)面方法已建立起關(guān)于VIA、導(dǎo)線焊盤與最大剪切應(yīng)力P3及最大法向應(yīng)力P4之間的函數(shù)關(guān)系,根據(jù)實(shí)際PCB 設(shè)計(jì)原則,導(dǎo)線焊盤尺寸應(yīng)大于等于VIA 尺寸,同時(shí)保證皮膚界面最大剪切應(yīng)力P3及最大法向應(yīng)力P4均不超過20 kPa。根據(jù)以上分析,確定了以導(dǎo)線焊盤與VIA之間的尺寸作為約束條件,以皮膚界面應(yīng)力作為優(yōu)化目標(biāo),其優(yōu)化模型為
具體優(yōu)化流程如下:1)在確定了優(yōu)化模型[20]后,根據(jù)設(shè)計(jì)變量、約束條件及目標(biāo)函數(shù)的設(shè)置進(jìn)行參數(shù)化建模和有限元分析,將設(shè)計(jì)變量與優(yōu)化目標(biāo)函數(shù)進(jìn)行關(guān)聯(lián)。2)選用最佳填充空間設(shè)計(jì)DOE 方法在參數(shù)空間中確定樣本點(diǎn)并計(jì)算對(duì)應(yīng)的響應(yīng)值。3)對(duì)步驟(2)中所得到的離散點(diǎn)選取合理的響應(yīng)面類型進(jìn)行擬合,根據(jù)觀測(cè)值與預(yù)測(cè)值擬合優(yōu)度曲線判斷響應(yīng)面模型是否準(zhǔn)確,若不準(zhǔn)確則改良設(shè)計(jì)空間重新進(jìn)行步驟(2)直至取得合理的響應(yīng)面模型。4)在響應(yīng)面模型選擇合理的條件下,需生成驗(yàn)證點(diǎn)檢驗(yàn)響應(yīng)面的精度是否足夠高。將偏離擬合優(yōu)度曲線的驗(yàn)證點(diǎn)設(shè)置為細(xì)化點(diǎn)提以高響應(yīng)面精度。5)利用多目標(biāo)遺傳算法在步驟(4)所建立的響應(yīng)面中尋取最優(yōu)解。6)對(duì)優(yōu)化候選點(diǎn)進(jìn)行數(shù)值計(jì)算,檢驗(yàn)優(yōu)化結(jié)果是否可靠,若不可靠,改良設(shè)計(jì)空間進(jìn)行步驟(3),可靠則輸出最佳參數(shù)。
3.3 優(yōu)化結(jié)果及可靠性分析
采用多目標(biāo)遺傳算法對(duì)VIA 及導(dǎo)線焊盤尺寸進(jìn)行優(yōu)化,設(shè)置初始種群數(shù)為2 000,每次迭代種群數(shù)為100,最大迭代次數(shù)為20,最大允許Pareto百分比和收斂性百分比分別設(shè)置為70%和2。圖5 給出了Pareto 解集分布,其中深色點(diǎn)集代表Pareto較優(yōu)的解集合,從圖中可以發(fā)現(xiàn),剪切應(yīng)力P3與法向應(yīng)力P4的解集呈負(fù)相關(guān)特性。

圖5 Pareto解集分布
從優(yōu)化候選點(diǎn)中擇優(yōu)選取一組解作為優(yōu)化后選點(diǎn),為了驗(yàn)證優(yōu)化結(jié)果的準(zhǔn)確性,將優(yōu)化候選點(diǎn)取整進(jìn)行數(shù)值計(jì)算。表5 為優(yōu)化前后各設(shè)計(jì)變量與輸出變量的對(duì)比結(jié)果,由表可知,優(yōu)化后皮膚界面剪切應(yīng)力P3及法向應(yīng)力P4均有所減小,其中剪切應(yīng)力P3與響應(yīng)面預(yù)測(cè)值1.623 7 之間的誤差為1.1%,相較于初始值1.7254降低了4.8%,法向應(yīng)力P4與響應(yīng)面預(yù)測(cè)值18.423之間的誤差為2.4%,相較于初始值31.659降低了40.4%。通過分析表4 與表5,表明基于響應(yīng)面法的目標(biāo)變量預(yù)測(cè)值與數(shù)值計(jì)算的目標(biāo)變量結(jié)果誤差較小,所得的優(yōu)化結(jié)果是可靠的。優(yōu)化前后皮膚界面剪切應(yīng)力及法向應(yīng)力分布如圖6所示。

表5 優(yōu)化前后參數(shù)對(duì)比

圖6 優(yōu)化前后皮膚界面剪切應(yīng)力和法向應(yīng)力云圖
4 結(jié)論
本文首先對(duì)多層可延展柔性電路進(jìn)行參數(shù)化建模,在有限元仿真的基礎(chǔ)上,通過DOE、響應(yīng)面數(shù)據(jù)擬合以及多目標(biāo)法向求解對(duì)VIA及導(dǎo)線焊盤設(shè)計(jì)變量進(jìn)行優(yōu)化設(shè)計(jì)。根據(jù)擬合誤差指標(biāo)可知響應(yīng)面模型的預(yù)測(cè)值與實(shí)際觀測(cè)值的相對(duì)誤差在合理范圍內(nèi)。基于多目標(biāo)遺傳算法優(yōu)化后的皮膚界面剪切應(yīng)力及法向應(yīng)力分別減小了4.8%和40.4%,取得了明顯的優(yōu)化效果,改善了皮膚界面最大應(yīng)力值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
濰坊學(xué)院學(xué)報(bào)(2016年2期)2016-12-01 13:00:11