長沙至衡陽低真空管道磁浮線路方案動(dòng)力性能評(píng)估
2024-02-23 06:06:34黃成名楊文東王英杰鮑慧明張繼鵬
鐵道勘察 2024年1期
關(guān)鍵詞:模型
黃成名 楊文東 王英杰 鮑慧明 張繼鵬
(1.中鐵工程設(shè)計(jì)咨詢集團(tuán)有限公司,北京 100055; 2.北京交通大學(xué)土木建筑工程學(xué)院,北京 100044)
引言
低真空管道磁浮交通系統(tǒng)利用封閉管道創(chuàng)造一個(gè)萬米高空量級(jí)的低氣壓環(huán)境來減少車輛高速運(yùn)行時(shí)的空氣阻力,同時(shí)利用磁浮技術(shù)實(shí)現(xiàn)車體懸浮與推進(jìn)來降低車輛與軌道間的摩擦阻力和車軌沖擊,從而使車輛運(yùn)行速度超過1 000 km/h。該系統(tǒng)結(jié)合了輪軌高速系統(tǒng)和航空系統(tǒng)的優(yōu)點(diǎn),在民用和軍用領(lǐng)域均具有重大研究價(jià)值[1-4]。
目前,已有不少學(xué)者采用車線系統(tǒng)動(dòng)力學(xué)模型對(duì)線路設(shè)計(jì)方案開展動(dòng)力學(xué)評(píng)估。劉磊建立2動(dòng)1拖的3節(jié)高速列車編組模型,仿真計(jì)算列車以350,400 km/h等速度通過不同曲線時(shí)的安全性和平穩(wěn)性指標(biāo),并給出高低速列車共線和不共線條件下最小曲線半徑推薦取值[5];袁偉以某海外高速鐵路為例,利用車線系統(tǒng)動(dòng)力學(xué)模型對(duì)比分析原線路設(shè)計(jì)方案與優(yōu)化后的行車動(dòng)力性能指標(biāo)[6];時(shí)瑾等建立高鐵動(dòng)車-線路動(dòng)力學(xué)仿真模型,計(jì)算動(dòng)車以400 km/h速度通過某既有350 km/h線路時(shí)的安全性和舒適性指標(biāo),分析現(xiàn)有350 km/h線路開行400 km/h高速列車的可行性[7];謝毅等以標(biāo)準(zhǔn)動(dòng)車組為原型建立車線耦合動(dòng)力學(xué)模型,從安全性和舒適性的角度出發(fā)對(duì)新建滬渝蓉高速鐵路重慶至成都段線路進(jìn)行動(dòng)力學(xué)評(píng)估[8];翟婉明等建立車輛-軌道空間耦合動(dòng)力學(xué)模型,研究400 km/h條件下平面曲線參數(shù)匹配建議取值[9]。針對(duì)中低速磁懸浮線路,葛亮以長沙磁浮試驗(yàn)線為例,利用運(yùn)動(dòng)學(xué)原理結(jié)合行車模擬,確定試驗(yàn)線合理長度及平縱斷面設(shè)計(jì)參數(shù)[10];陳志賢等建立中低速高溫超導(dǎo)磁懸浮車輛動(dòng)力學(xué)仿真模型,分析車輛曲線通過性能,并在此基礎(chǔ)上對(duì)懸浮架結(jié)構(gòu)方案進(jìn)行優(yōu)化[11]。針對(duì)高速磁懸浮線路,WANG等建立高速磁浮車輛-曲線軌道梁耦合模型,以曲線最短長度為目標(biāo)、乘客舒適度限值為邊界條件研究平面曲線參數(shù)選擇[12];YUAN等采用UM軟件建立高溫超導(dǎo)(HTS)車輛-橋梁耦合模型,并對(duì)比分析EMS、EDS磁浮車輛動(dòng)力性能[13]。針對(duì)超高速磁懸浮線路,DENG等在西南交通大學(xué)高溫超高磁浮試驗(yàn)線上對(duì)磁懸浮車輛運(yùn)動(dòng)穩(wěn)定性及非線性振動(dòng)等特性進(jìn)行研究[14-15];吳昊從舒適度指標(biāo)出發(fā)研究影響平面曲線參數(shù)的因素,計(jì)算曲線半徑及緩和曲線長度取值,并利用剛體運(yùn)動(dòng)學(xué)理論對(duì)支撐力和導(dǎo)向力進(jìn)行分析[16]。綜上所述,采用車線動(dòng)力學(xué)手段對(duì)線路參數(shù)及線路方案進(jìn)行評(píng)估可有效反映車輛通過曲線時(shí)的動(dòng)力性能。然而,目前缺乏對(duì)低真空管道超高速磁懸浮線路方案動(dòng)力學(xué)評(píng)估方面的研究。
以下在前人的研究基礎(chǔ)上,在京廣通道上選取長沙至衡陽段開展線路方案研究。基于車線系統(tǒng)動(dòng)力學(xué)理論,采用低溫超導(dǎo)電動(dòng)懸浮制式,建立低真空管道磁浮車輛-線路動(dòng)力學(xué)模型,計(jì)算超高速磁懸浮車輛通過長沙至衡陽段線路時(shí)的車輛動(dòng)力性能指標(biāo),從時(shí)程曲線和頻數(shù)統(tǒng)計(jì)方面進(jìn)行分析。以期為真空管磁懸浮交通系統(tǒng)的建設(shè)和運(yùn)營提供理論依據(jù)。
1 車輛-線路動(dòng)力學(xué)模型
1.1 車輛模型
采用多體動(dòng)力學(xué)軟件Simpack建立真空管磁懸浮車輛三維空間模型。車輛模型由1個(gè)車體、2個(gè)轉(zhuǎn)向架組成,其中車體與轉(zhuǎn)向架之間由二系懸掛彈簧連接。每個(gè)轉(zhuǎn)向架包含2個(gè)H構(gòu)架,每個(gè)H構(gòu)架又有12個(gè)電磁鐵。電磁鐵安裝在H構(gòu)架兩側(cè)的縱梁下,縱梁和電磁鐵之間由一系列懸掛彈簧連接。電磁力通過阻尼彈簧模擬,彈簧側(cè)向壓縮提供導(dǎo)向力,垂向壓縮提供懸浮力。在建模過程中將車體、轉(zhuǎn)向架和H構(gòu)架等部件視為剛體,車體和轉(zhuǎn)向架考慮縱向、浮沉、橫移、側(cè)滾、點(diǎn)頭及搖頭自由度,H構(gòu)架橫梁考慮側(cè)滾自由度,H構(gòu)架縱梁考慮點(diǎn)頭自由度,電磁鐵考慮縱向、浮沉、橫移自由度。因此,真空管磁懸浮車輛模型共有174個(gè)自由度,真空管磁懸浮車輛模型示意見圖1。
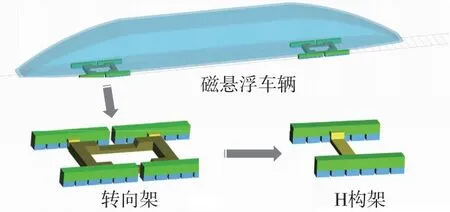
圖1 真空管磁懸浮車輛模型Fig.1 Schematic diagram of the vacuum tube maglev vehicle model
1.2 線路不平順模型
目前缺少低真空管道超高速磁懸浮實(shí)測不平順數(shù)據(jù),故施加高速磁浮鐵路線路不平順作為激勵(lì)[17],不平順功率譜密度為

(1)
式中,S(Ω)為功率譜密度;Ω為空間頻率;A、B、C、D、E、F、G均為功率譜特征參數(shù);不平順功率譜密度參數(shù)見表1。
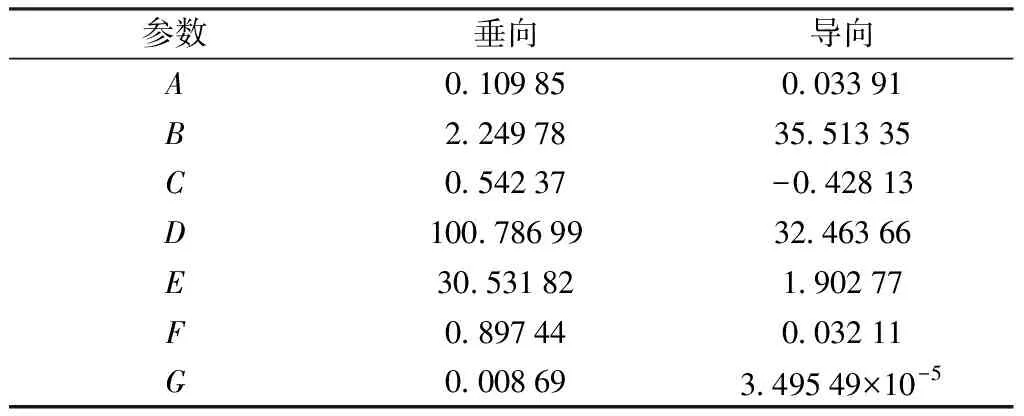
表1 不平順功率譜密度參數(shù)
2 長沙至衡陽線路方案及動(dòng)力學(xué)評(píng)價(jià)指標(biāo)
長沙至衡陽超高速磁懸浮試驗(yàn)線長度為161.86 km,最高設(shè)計(jì)速度為1 000 km/h,長沙至衡陽線路方案示意見圖2。
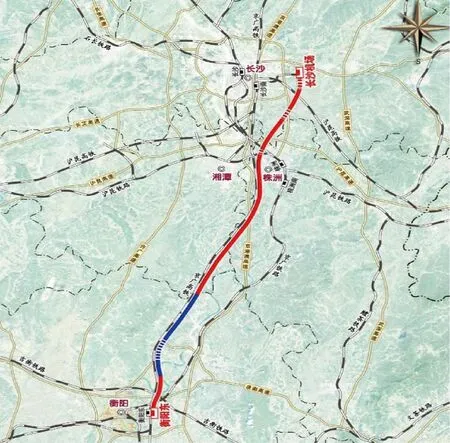
圖2 長沙至衡陽線路方案示意Fig.2 Schematic diagram of Changsha to Hengyang route
該線路方案由7段曲線組成,曲線半徑為15 000~30 000 m,緩和曲線長度均為1 400 m,長沙至衡陽線路參數(shù)見表2。此外,圓曲線橫坡為16°,車輛運(yùn)行速度為1 000 km/h。
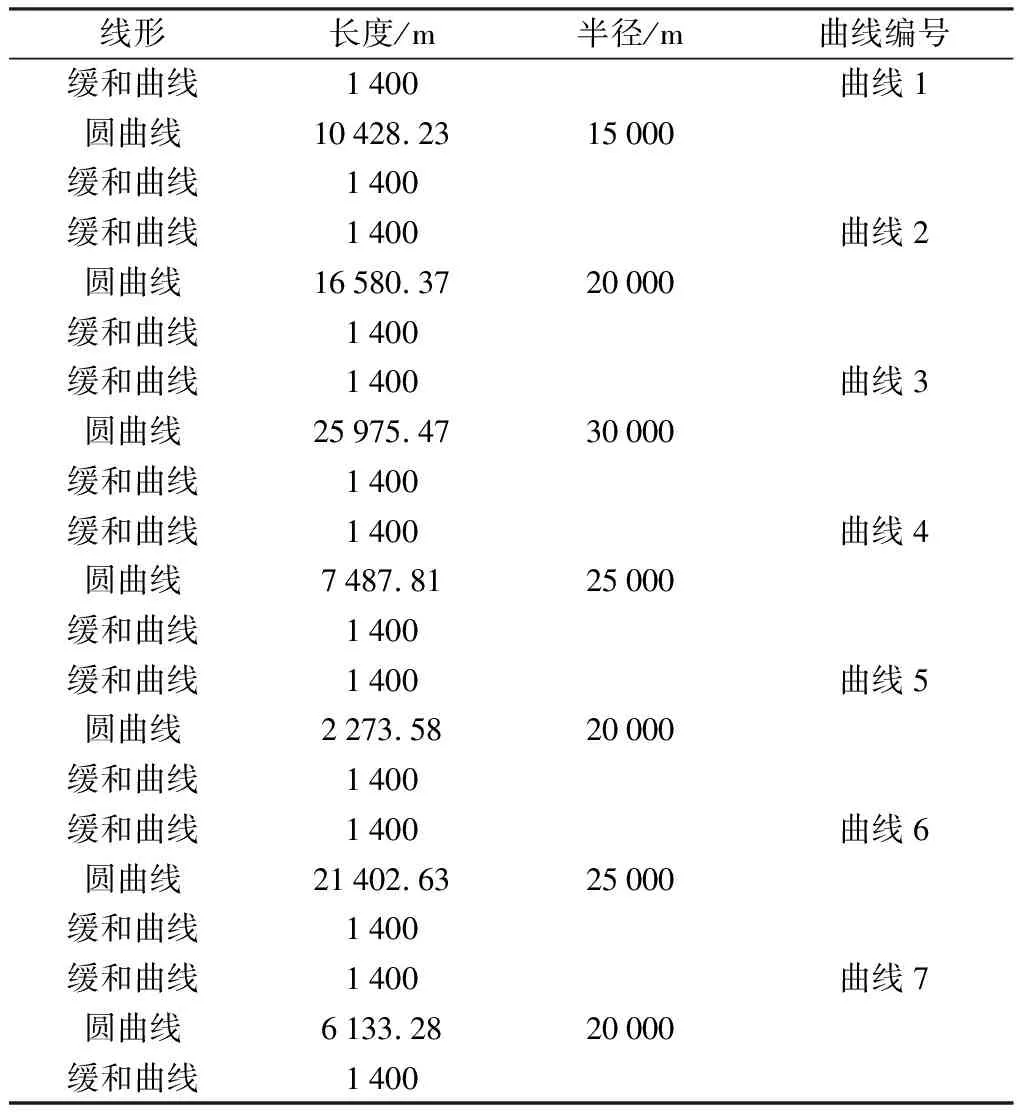
表2 長沙至衡陽線路參數(shù)
借鑒現(xiàn)有磁浮鐵路技術(shù)標(biāo)準(zhǔn)、高速鐵路設(shè)計(jì)規(guī)范中有關(guān)舒適性的規(guī)定[18-20],選取車體垂向和橫向加速度作為動(dòng)力學(xué)評(píng)價(jià)指標(biāo),動(dòng)力學(xué)評(píng)價(jià)指標(biāo)及限值見表3。

表3 動(dòng)力學(xué)評(píng)價(jià)指標(biāo)及限值 m/s2
3 動(dòng)力學(xué)評(píng)價(jià)分析
3.1 時(shí)程曲線分析
利用所建模型,計(jì)算得到車輛在該段線路上運(yùn)行時(shí)車體垂向加速度、橫向加速度響應(yīng)及前轉(zhuǎn)向架一位電磁鐵的懸浮力和導(dǎo)向力。
(1)車體垂向加速度
計(jì)算得到磁浮車輛車體垂向加速度時(shí)程曲線(見圖3)。
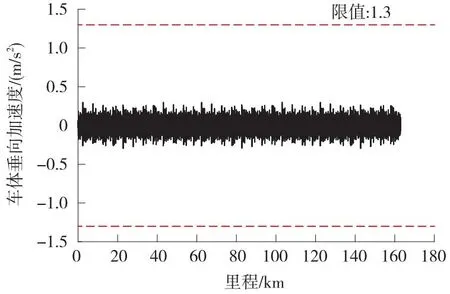
圖3 車體垂向加速度時(shí)程曲線Fig.3 Time history curve of the carbody vertical acceleration
由圖3可知,車體垂向加速度幅值不超過0.5 m/s2,均在限值1.3 m/s2以內(nèi),滿足舒適性要求;車體垂向加速度變化總體平穩(wěn),沒有出現(xiàn)突變現(xiàn)象。
(2)車體橫向加速度
計(jì)算得到磁浮車輛車體橫向加速度時(shí)程曲線(見圖4)。

圖4 車體橫向加速度時(shí)程曲線Fig.4 Time history curve of the carbody lateral acceleration
由圖4可知,車體橫向加速度幅值不超過0.2 m/s2,均在限值1.0 m/s2以內(nèi),滿足舒適性要求;車體橫向加速度變化總體平穩(wěn),沒有出現(xiàn)突變現(xiàn)象。
(3)懸浮力
計(jì)算得到前轉(zhuǎn)向架一位電磁鐵左右側(cè)懸浮力時(shí)程曲線(見圖5)。
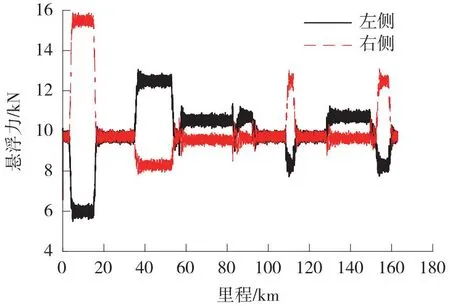
圖5 懸浮力時(shí)程曲線Fig.5 Time history curve of the levitation force
由圖5可知,懸浮力在直線段上均值約為10 kN,曲線段上幅值普遍不超過16 kN,最大值出現(xiàn)在曲線1上,為15.9 kN;在直線和圓曲線間過渡平滑,說明緩和曲線長度設(shè)置合理。
(4)導(dǎo)向力
計(jì)算得到前轉(zhuǎn)向架一位電磁鐵左右側(cè)導(dǎo)向力時(shí)程曲線(見圖6)。
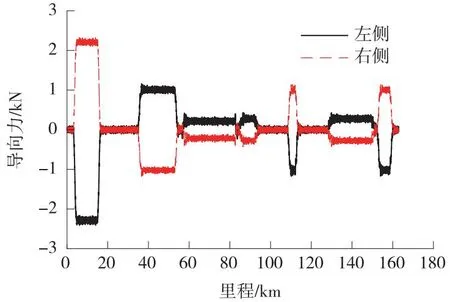
圖6 導(dǎo)向力時(shí)程曲線Fig.6 Time history curve of the guiding force
由圖6可知,導(dǎo)向力在直線段上幅值小于0.5 kN,曲線段上幅值不超過3 kN,最大值出現(xiàn)在曲線1上,為2.3 kN;在直線和圓曲線之間過渡平滑,說明緩和曲線長度設(shè)置合理。
以上時(shí)程曲線結(jié)果表明,車輛在直線和圓曲線上運(yùn)行時(shí)各項(xiàng)動(dòng)力性能指標(biāo)較小,車輛振動(dòng)加速度滿足限值要求,緩和曲線長度設(shè)置合理。
3.2 統(tǒng)計(jì)頻數(shù)分析
(1)動(dòng)力學(xué)指標(biāo)分布情況
對(duì)所計(jì)算的車體垂向加速度時(shí)程曲線進(jìn)行統(tǒng)計(jì),得到其在不同數(shù)值區(qū)間上的頻數(shù)分布,見圖7。

圖7 車體垂向加速度頻數(shù)分布Fig.7 Frequency distribution of the carbody vertical acceleration
由圖7可知,車體垂向加速度在0~0.1,0.1~0.2,0.2~0.3 m/s2區(qū)間內(nèi)的占比分別為82.6%、16.6%、0.8%,其中占比最大(82.6%)的區(qū)間為0~0.1 m/s2。
對(duì)所計(jì)算的車體橫向加速度時(shí)程曲線進(jìn)行統(tǒng)計(jì),得到其在不同數(shù)值區(qū)間上的頻數(shù)分布,見圖8。

圖8 車體橫向加速度頻數(shù)分布Fig.8 Frequency distribution of the carbody lateral acceleration
由圖8可知,車體橫向加速度在0~0.03,0.03~0.05,0.05~0.1 m/s2區(qū)間內(nèi)的占比分別為78.8%、16.9%、4.3%,其中占比最大(78.8%)的區(qū)間為0~0.03 m/s2。
近年來,隨著國內(nèi)鉀肥產(chǎn)業(yè)不斷擴(kuò)大,產(chǎn)量快速增加,提高國產(chǎn)鉀肥市場份額、保障我國鉀肥自給、提升中國在國際鉀肥市場中的地位和進(jìn)口談判中的主動(dòng)權(quán),成為世界鉀肥價(jià)格洼地。國產(chǎn)鉀肥的發(fā)展,極大地減少了我國鉀肥的對(duì)外依存度,為保障我國糧食安全做出了突出的貢獻(xiàn)。
對(duì)所計(jì)算的前轉(zhuǎn)向架一位電磁鐵左右側(cè)懸浮力時(shí)程曲線進(jìn)行統(tǒng)計(jì),得到其在不同數(shù)值區(qū)間上的頻數(shù)分布,見圖9。
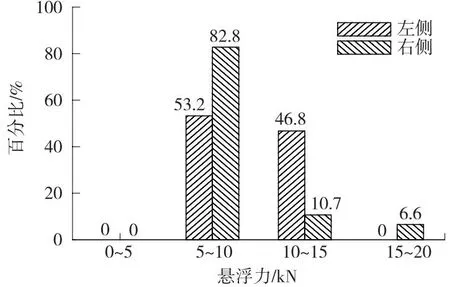
圖9 懸浮力頻數(shù)分布Fig.9 Frequency distribution of the levitation force
由圖9可知,左側(cè)懸浮力在0~5,5~10,10~15,15~20 kN區(qū)間內(nèi)的占比分別為0%、53.2%、46.8%、0%,其中占比最大(53.2%)的區(qū)間為5~10 kN。同樣,右側(cè)懸浮力在0~5、5~10,10~15,15~20 kN區(qū)間內(nèi)的占比分別為0%、82.8%、10.7%、6.6%,其中占比最大(82.8%)的區(qū)間為5~10 kN。
對(duì)所計(jì)算的前轉(zhuǎn)向架一位電磁鐵左右側(cè)導(dǎo)向力時(shí)程曲線進(jìn)行統(tǒng)計(jì),得到其在不同數(shù)值區(qū)間上的頻數(shù)分布,見圖10。
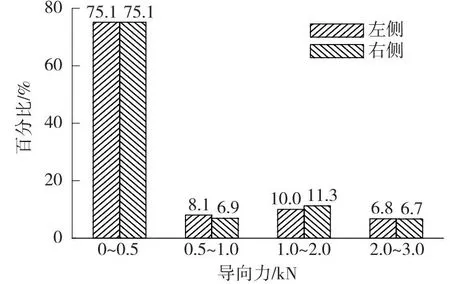
圖10 導(dǎo)向力頻數(shù)分布Fig.10 Frequency distribution of the guiding force
由圖10可知,左側(cè)導(dǎo)向力在0~0.5,0.5~1,1~2,2~3 kN區(qū)間內(nèi)的占比分別為75.1%、8.1%、10%、6.8%,其中占比最大(75.1%)的區(qū)間為0~0.5 kN。右側(cè)導(dǎo)向力在0~0.5,0.5~1,1~2,2~3 kN區(qū)間內(nèi)的占比分別為75.1%、6.9%、11.3%、6.7%,其中占比最大(75.1%)的區(qū)間為0~0.5 kN。
由上述分析可知,各項(xiàng)動(dòng)力學(xué)指標(biāo)主要分布區(qū)間均在限值以下,滿足行車平穩(wěn)性要求。
(2)曲線半徑影響分析
為了探究不同曲線半徑對(duì)各項(xiàng)動(dòng)力學(xué)指標(biāo)的影響,計(jì)算不同圓曲線半徑上車體垂向加速度、橫向加速度、曲線內(nèi)外側(cè)懸浮力和導(dǎo)向力的最大值、平均值及有效值,計(jì)算結(jié)果見表4。

表4 各項(xiàng)動(dòng)力性能指標(biāo)統(tǒng)計(jì)值
由表4可知,圓曲線上各項(xiàng)指標(biāo)的最大值、平均值和有效值均滿足舒適性限值要求。以車體垂向加速度有效值為例,繪制其與曲線半徑的關(guān)系(見圖11)。
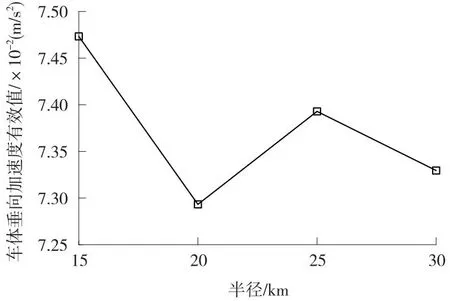
圖11 車體垂向加速度隨曲線半徑變化關(guān)系Fig.11 Variation of vertical acceleration of the carbody against curve radius
由圖11可知,曲線半徑從15 000 m增加至30 000 m時(shí),車體垂向加速度有效值呈現(xiàn)出先下降后上升再下降的趨勢,但均遠(yuǎn)低于限值1.3 m/s2。車體垂向加速度有效值在曲線半徑20 000 m處數(shù)值最小,這是由于曲線半徑20 000 m、車速1 000 km/h與橫坡為16°相匹配造成的。
以車體橫向加速度有效值為例,繪制其與曲線半徑的關(guān)系(見圖12)。
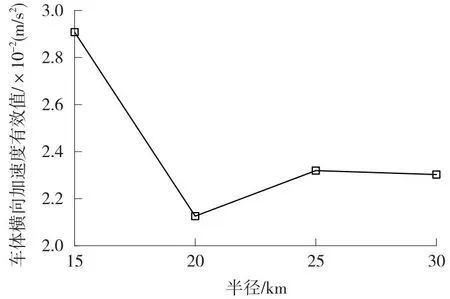
圖12 車體橫向加速度隨曲線半徑變化關(guān)系Fig.12 Variation of lateral acceleration of the carbody against curve radius
由圖12可知,曲線半徑從15 000 m增加至30 000 m時(shí),車體橫向加速度有效值呈現(xiàn)出先下降后上升再下降的趨勢,但均遠(yuǎn)低于限值1.0 m/s2。車體橫向加速度有效值在曲線半徑20 000 m處數(shù)值最小,這是由于曲線半徑20 000 m、車速1 000 km/h與橫坡為16°相匹配造成的。以曲線內(nèi)外側(cè)懸浮力有效值為例,繪制其與曲線半徑的關(guān)系曲線(見圖13)。
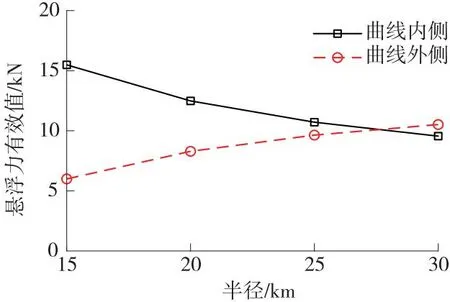
圖13 懸浮力隨曲線半徑變化關(guān)系Fig.13 Variation of the levitation force against curve radius
由圖13可知,曲線半徑從15 000 m增加至30 000 m時(shí),曲線內(nèi)側(cè)懸浮力逐漸下降,而曲線外側(cè)懸浮力逐漸上升,且曲線半徑增大到30 000 m時(shí),曲線外側(cè)懸浮力反超內(nèi)側(cè)懸浮力,這是因?yàn)榘霃?0 000 m、橫坡為16°時(shí)車輛處于過超高狀態(tài);同時(shí),曲線內(nèi)外側(cè)懸浮力平均值始終處于10 kN左右。
以曲線內(nèi)外側(cè)導(dǎo)向力有效值為例,繪制其與曲線半徑的關(guān)系(見圖14)。
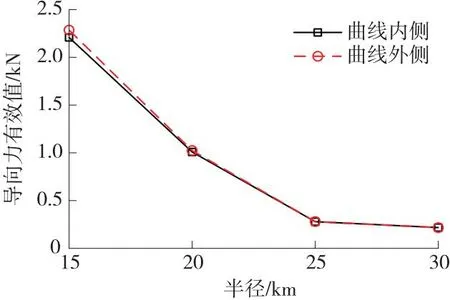
圖14 導(dǎo)向力隨曲線半徑變化關(guān)系Fig.14 Variation of the guiding force against curve radius
由圖14可知,曲線半徑從15 000 m增加至30 000 m時(shí),導(dǎo)向力整體處于下降趨勢,這是由電磁鐵與導(dǎo)軌間的變形差所決定的;同時(shí),曲線內(nèi)外側(cè)導(dǎo)向力較為接近。
綜上所述,隨著曲線半徑的增大,車體垂向和橫向加速度先減小后增大再減小,但均遠(yuǎn)小于舒適性限值;曲線內(nèi)側(cè)懸浮力、導(dǎo)向力隨曲線半徑的增大而減小,曲線外側(cè)懸浮力隨曲線半徑的增大而增大。橫坡16°、車速1 000 km/h時(shí),曲線半徑20 000 m所對(duì)應(yīng)車體振動(dòng)加速度最小,該曲線半徑下的車輛動(dòng)力學(xué)性能較優(yōu)。
4 結(jié)論
建立低真空超高速電動(dòng)磁浮交通車線系統(tǒng)動(dòng)力學(xué)模型,以長沙至衡陽試驗(yàn)線的線路方案為例,分析了超高速磁懸浮車輛運(yùn)行時(shí)的車輛動(dòng)力性能指標(biāo),得到以下結(jié)論。
(1)當(dāng)車輛以1 000 km/h設(shè)計(jì)速度運(yùn)行時(shí),計(jì)算得到的車體垂向和橫向加速度均低于舒適性限值,動(dòng)力性能滿足要求。
(2)緩和曲線長度為1 400 m時(shí),車輛從直線段運(yùn)行到曲線段過程中各項(xiàng)動(dòng)力性能指標(biāo)過渡平穩(wěn),緩和曲線長度設(shè)置合理。
(3)曲線半徑20 000 m、車速1 000 km/h與橫坡為16°相匹配,各項(xiàng)動(dòng)力性能指標(biāo)較優(yōu)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19