地面LIDAR在滑坡災害三維實景建模中的應用
2024-02-23 05:51:54時丕旭
鐵道勘察 2024年1期
關鍵詞:模型
時丕旭
(中鐵第一勘察設計院集團有限公司,西安 710043)
引言
高速鐵路建設和運營階段,在路基、隧道口等構筑物附近滑坡現象時有發生,影響構筑物穩定性,對人民財產和生命安全構成威脅[1-2]。因此,如何高效處理滑坡災害,將損失降低至最小顯得尤為重要。滑坡三維實景模型可為施工處理提供基礎數據,如何高效獲取滑坡體三維模型參數,是滑坡體病害整治的關鍵。
為快速實現滑坡等災害整治,國內眾多學者進行了相關研究。韓彬等利用三維激光掃描技術結合Charge Coupled Device(簡稱“CCD”)攝像機,研究三維激光掃描在地質風險動態監測中的可行性[3];趙立都等采用多期地面三維激光掃描的滑坡點云數據,研究地面三維激光掃描在滑坡監測中基準的統一性[4];黨杰等以貴州水城獨家寨崩塌地質災害為依托,采用機載Light Detection and Ranging(簡稱“LIDAR”)與地面三維激光掃描相融合的方法,對滑坡等災害變形監測[5];南竣祥等以沿黃公路邊坡地質災害為依托,研究三維激光掃描監測地質災害隱患點的可行性,制作完成的彩色三維模型可用于成果展示及數據分析[6]。
綜上所述,獲取滑坡等地質災害三維坐標的手段較多,常見的有傳統人工測量、機載LIDAR、地面三維激光掃描(簡稱地面LIDAR)等。其中,地面LIDAR技術具有現場靈活、操作簡單、高速度、高密度、高精度、數字化、自動化、非接觸等優點[7]。以寶蘭高鐵上莊隧道出口滑坡為例,采用地面LIDAR技術優化布設掃描站點,以無靶標掃描方式獲取鐵路滑坡體表面的點云數據,利用測站點坐標、全景影像等構建三維實景模型,輔助滑坡災害整治。
1 地面LIDAR工作原理
地面LIDAR由三維激光掃描儀、數碼相機、控制器和電源供應系統共同組成[8],是一種集成了激光測距、激光掃描及校正系統等多種高新技術的新興空間信息數據獲取手段[9-10]。
地面LIDAR掃描模塊工作中,動力系統轉動反射棱鏡,將激光光束順著掃描方向掃過被測物體,激光測距模塊測量激光發射、返回時間和激光相位,可自動計算出物體上每一點至掃描儀的距離,即
(1)
式中,Δt為返回時間;S為被測物和掃描儀之間的距離;C為光速。
同時,控制器測量每個脈沖激光束的水平角α和天頂距θ,根據極坐標系和平面直角坐標系的坐標轉換公式,把激光發射處定位為坐標原點[11]。由此可得被測物體表面點P坐標,計算公式為
(2)
所獲取被掃描物體的點云影像具有可量測性,且三維激光掃描外業數據采集無需光源,可在夜間或黑暗的作業環境中進行掃描[12],可操作性較強。
2 無靶標掃描研究
2.1 儀器設備
本次選用RiEGL VZ-2000i三維激光掃描儀,其測距為2 500 m,精度為5 mm,數據采集速度最高可達500 000點/s。另外,RiEGL VZ-2000i獨有的全波形雷達技術,可進行回波數字化、實時波形處理、多波束收發處理,即使在可見度低、多重目標的惡劣情況(粉塵、霧霾、植被、小雨)下,也能正常工作。
RiEGL VZ-2000i三維激光掃描系統主要由掃描儀主機、數碼相機、電池等組成,儀器設備見圖1。掃描儀主機獲取體被測物體表面的點云,數據相機拍攝全景影像,為點云貼附真實紋理,電池為掃描儀主機和相機供電。現場需采用RTK設備測量掃描儀測站對中點坐標和高程,并量取掃描儀高。

圖1 外業儀器設備Fig.1 Field equipment
2.2 無靶標掃描測量
傳統的地面三維激光掃描儀測量現場需在掃描范圍內均勻布設公共的靶球[13],用于站點間點云數據拼接。而本次掃描無需布設靶球,通過識別測站間重疊點云實現拼接,為滑坡三維實景建模外業測量節約大量時間。將地面三維激光掃描儀架設在已知點上開展外業數據采集,通過發射激光脈沖獲取具有真實三維坐標的物體表面點云數據[14],外業數據采集流程見圖2。
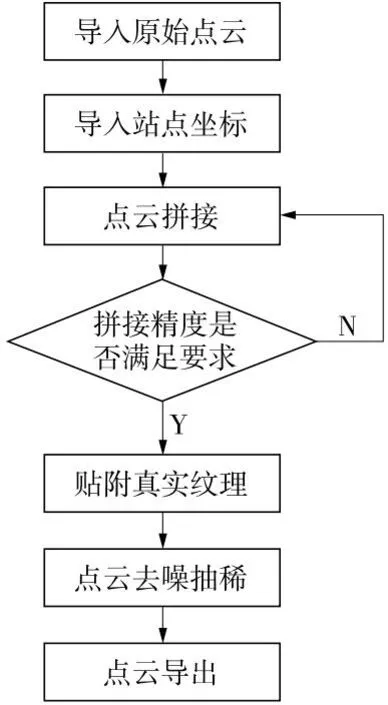
圖2 外業數據采集流程Fig.2 Field data collection process
以寶蘭高鐵上莊隧道出口滑坡為例,滑坡影響范圍約0.2 km2,嚴重威脅鐵路安全運營,現場情況見圖3。由圖3可知,滑坡現場環境復雜,人員無法直接到達滑坡體位置,傳統人工RTK測量方法難以實現,故決定采用地面LIADR技術采集滑坡體表面點云數據,降低外業測量的風險,提高作業效率。

圖3 上莊隧道出口滑坡現場環境Fig.3 Site environment of landslide at the exit of Shangzhuang Tunnel
點云數據采集前,需設計掃描站點位置,通過勘查滑坡周圍環境,優化布設的掃描站點,實現地面LIDAR掃描的最大視場范圍并保證相鄰站點間點云重疊度。再利用實時定位系統GPS-RTK采集站點坐標和高程,地面三維激光掃描儀布置在設計的站點上,并量取每一站的儀器高,采集滑坡體點云數據,現場點云數據采集見圖4。

圖4 鐵路滑坡現場點云數據采集Fig.4 Point cloud data acquisition of railway landslide site
應合理設置站點間隔,若間隔太大,則采集的點云稀疏,不利于后期點云拼接;若間隔太小,則采集的點云數據量過大,為后期數據處理帶來麻煩,造成不必要的浪費。在現場通視良好的情況下,掃描站點間隔宜設置為60 m,以保證相鄰掃描站間有足夠的重疊區;若通視情況較差,則應適當增加掃描站數,以保證后續點云拼接精度。
3 數據預處理
點云數據獲取及測站點坐標采集完成后,對點云和影像進行預處理[15],點云數據預處理流程見圖5。
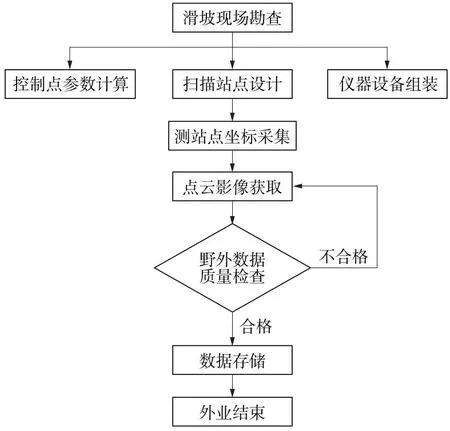
圖5 點云預處理流程Fig.5 Point cloud preprocessing flow
3.1 點云拼接
三維建模過程中,需要對不同測站的點云進行拼接[16]。本次在寶蘭高鐵上莊隧道出口滑坡周圍共掃描9站,均利用RTK設備采集掃描儀對中點坐標和高程,量取儀器高,獲取掃描站點中心坐標和高程。在RiSAN PRO軟件中,將每一站點云數據與對應的站點中心坐標匹配,手動旋轉點云,再進行自動拼接,計算出本次點云拼接精度為6.9 mm,滿足三維建模精度要求[17],點云自動拼接結果見圖6。
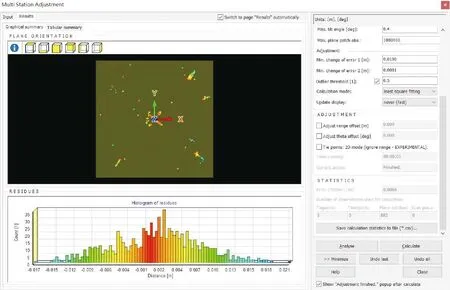
圖6 點云拼接計算結果Fig.6 Point cloud splicing results
3.2 點云去噪
地面三維激光掃描中,人員走動或物體高反射會影響采集的點云質量,滑坡附近有部分積水,掃描過程中易出現水體鏡面反射影響點云質量,局部點云數據見圖7。圖中的黑色部分即為水體影響,拼接完成后應對影響點云質量的噪點進行刪除,完成點云去噪[18]。

圖7 點云數據(局部)Fig.7 Point cloud data (partial)
在RiSCAN PRO軟件中,噪點去除采用人工刪除和自動刪除相結合的方式。對于滑坡現場雜草等植被產生的噪點,采用軟件自動濾除;在掃描儀周圍及人員走動產生的噪點,采用人工刪除,自動過濾和人工刪除噪點后的點云數據見圖8。

圖8 去噪后的點云數據Fig.8 Point cloud data after denoising
3.3 影像預處理及紋理貼附
外業數據采集過程中,在每一測站掃描完成后,三維激光掃描儀搭載的相機自動采集360°范圍的影像,一般每測站采集6張影像用于合成全景影像后。對于個別質量較差影像,調整對比度、曝光度、飽和度等。在點云數據拼接、坐標轉換、去噪等完成后,可根據拍攝的影像貼附點云真實色彩[19],真實紋理貼附后的點云數據見圖9。

圖9 真實紋理貼附的點云數據Fig.9 Point cloud data attached to a real texture
4 三維實景建模及應用
4.1 三維建模
滑坡點云數據經過配準、拼接、坐標轉換、降噪、真實紋理貼附等預處理后,通過點云封裝,生成三角網,再根據點云分布位置生成模型。
封裝后的點云由于去噪等操作可能會出現空洞現象,需對模型進一步優化。在多邊形階段,應刪除三角形并采用最小二乘算法擬合曲面[20],再根據滑坡現場實際情況對三角網進行優化。在軟件中執行Smooth and decimate操作,在保證曲面結構特征的基礎上,減少多邊形數量,使模型更加光滑,滑坡三維實景模型見圖10。

圖10 滑坡三維模型Fig.10 Three-dimensional model of landslide
在對模型的處理過程中,不改變模型表面的紋理走向,填補模型漏洞時,應盡量沿物體的實際紋路進行處理。處理完成后,可以看出滑坡的真實形態和特征,并能實現二次量測,這是傳統測量無法達到的。
4.2 精度分析
在生成的三維實景模型中提取部分特征點坐標,現場采用RTK在相應位置實測坐標,平面坐標及高程對比均小于5 cm,說明三維實景模型精度優于5 cm,可滿足1:500地形圖和滑坡土方量預估的精度要求。
4.3 三維模型應用
生成的滑坡三維模型可進行二次量測,根據生產需要在模型中生成等高線,輔助地形圖制作。計算土石方量,在RiSCAN PRO軟件中,可以計算出滑坡處缺失的土方量,可直接預估出滑坡加固所需的土方量,輔助施工。三維模型還可用于隧道病害監測、滑坡危險性評價、大壩變形監測、鐵路選線輔助決策等[21]。建立的三維實景模型在軟件中可錄制視頻,可直觀展現滑坡體及周圍環境的全貌,便于制定滑坡災害整治方案。
5 結語
滑坡災害嚴重影響鐵路安全運營,且人員難以直接到達滑坡體表面,傳統測量方法無法獲取滑坡體表面的三維坐標,而地面LIDAR克服了滑坡現場接觸測量的困難,可快速獲取滑坡體及周圍地物表面的三維點云數據。另外,采用該方法現場無需布置靶標,通過測站間重疊點云拼接,再經過內業處理即可生成滑坡三維實景模型。建立的滑坡三維模型具有可量測性,可直接在模型中生成等高線,計算土方量、表面積等,輔助滑坡災害整治。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19