基于移動三維激光掃描技術的地鐵隧道接觸網導高檢測新方法*
2024-02-23 00:38:56盧建軍黃小斌鄭佳佳
城市軌道交通研究 2024年1期
盧建軍 黃小斌 吳 勇 鄭佳佳 鮑 艷
(1.浙江華東測繪與工程安全技術有限公司, 310014, 杭州; 2.杭州杭港地鐵有限公司, 310018, 杭州;3.北京工業大學城市與工程安全減災教育部重點實驗室, 100124, 北京)
接觸網導高是保證列車正常受電的重要參數。若導高過高,則會使電弓離線產生電弧,進而燒損接觸導線和受電弓; 若導高過低,則會危及人員和超限貨物的安全。可見,當接觸導線坡度變化過大時,易因導高過高而產生電弧,從而影響弓網受流質量,加大滑板的接觸導線的磨損。因此,需要定期進行導高檢測[1]。
導高檢測分為接觸式檢測和非接觸式檢測兩種。接觸式檢測的常用方式為吊桿式法及檢測車法;非接觸式檢測的常用方式為光學法法超聲波法、激光法和攝像法。接觸式檢測的檢測工具須和輸電高壓線接觸,在檢測過程中存在安全隱患,且其過程繁瑣、精度低。目前較先進的接觸網導高檢測多采用超聲波法及激光法。其中超聲波法檢測受外界干擾影響大,誤差大。三維激光掃描技術具有抗外界干擾強、檢測精度高等優點,能實時自動監控,實現對接觸網導高的動態測量[2]。對此,本文提出基于移動三維激光掃描技術的地鐵隧道接觸網導高檢測新方法。
1 導高檢測新方法
1.1 模型構建
掃描設備為Amberg GRP5000移動式三維激光掃描儀(以下簡稱“掃描儀”),其采用線掃描模式進行外業數據采集,掃描速度為100 r/s,移動速度為0.5 m/s。推動掃描儀沿隧道中線前行,即可得到整個隧道的三維點云模型。由線掃描模式進行數據采集,隧道結構及附屬物同掃描系統的距離相對穩定,所以點云模型的點云密度相對均勻,從而保證了點云模型的整體精度。
地鐵隧道中的接觸網大部分屬于剛性接觸網,接觸導線被匯流排牽引,整體結構比較明顯。通過三維激光掃描獲取隧道結構點云模型(見圖1)的同時,也包含了接觸網等附屬結構的點云信息。接觸網實景照片見圖2。通過數據裁剪可得到接觸網部分的點云模型(見圖3),基于接觸網點云模型可進行導高及拉出值的檢測。

圖1 隧道結構點云模型
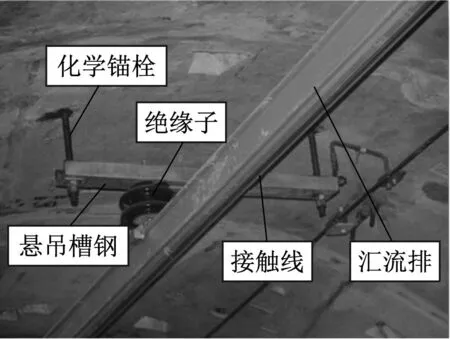
圖2 接觸網實景照片
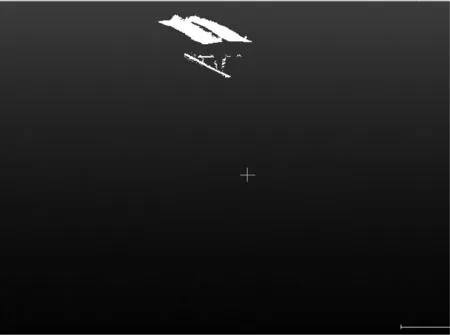
圖3 接觸網點云模型
1.2 相對坐標系統
在基于移動式三維激光掃描技術獲取點云的原始數據中,有兩套相對坐標系統——UTC(超高改正)坐標系統, CTC(無超高改正)坐標系統。如圖4所示:UTC坐標系統的X、Y坐標軸分別為水平方向和豎直方向,坐標軸朝向不隨掃描系統的傾斜角度變化而變化;CTC坐標系統的x軸平行于軌面朝向隧道壁,y軸垂直于軌面朝向隧道頂部。兩套系統的坐標原點O都在軌面連線的中點。進行導高檢測時采用CTC坐標系統,接觸網點云模型中任意點i的縱坐標值yi即為接觸網導高,橫坐標值xi即為拉出值。
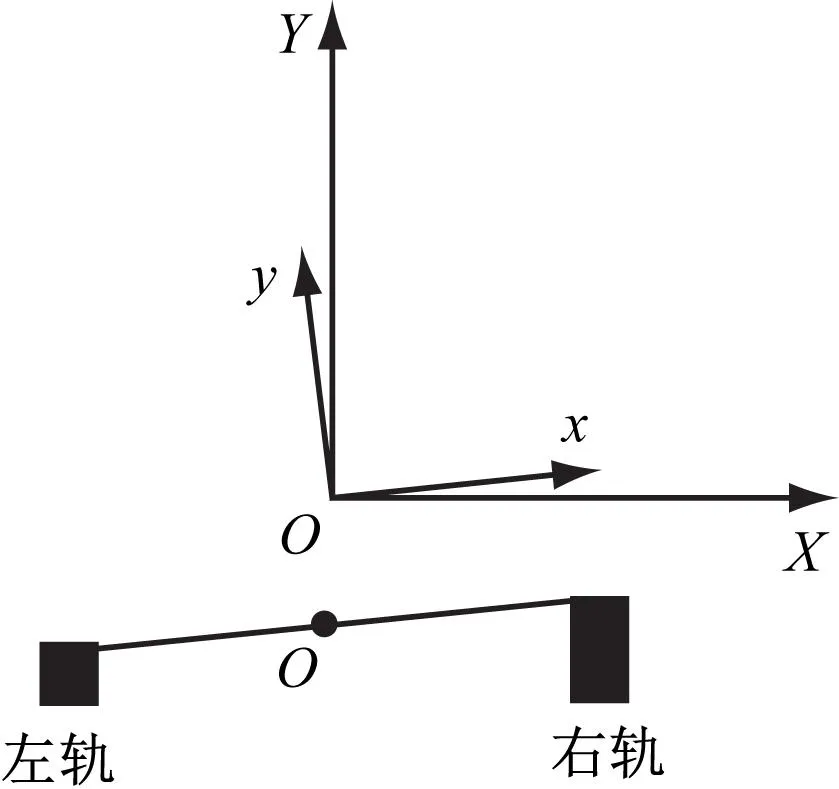
圖4 坐標系統示意圖
1.3 導高檢測
三維激光掃描獲取得到的隧道結構點云模型中包含接觸網等設備設施信息。通過點云截取可單獨提取出接觸網點云模型。接觸網點云模型中包含接觸導線、匯流排、絕緣子、懸吊槽鋼、化學錨栓等結構。其中有效信息是沿隧道延伸的接觸網中接觸導線最低點的高度及拉出值。由于CTC坐標系統中yi值即為導高,因此在點云模型中找到yi最小值,然后提取該位置里程即拉出值即可。
根據地鐵隧道的環境特性(以一環一環管片拼裝構成),因此為了數據的全面性及更好的定位,每一環管片生成找到yi值最小值,并提取出該位置的拉出值及里程信息,加上該位置環號信息。導高有設計的標準導高,一般為40~50 mm,可根據實測導高值與設計值對比得到導高差異量。整個隧道接觸網系統是由一根根錨段組成,為了保證受電弓能從一根錨段順利平滑過渡到另一根錨段,在兩根錨段銜接部位有一定重疊,通常涉及四環管片,在導高測量時兩根錨段的高度都需要測量,故導高成果表中應包含錨段關節的信息。杭州某地鐵區間盾構隧道采用掃描儀得到的導高檢測結果(部分)見表1。

表1 杭州某地鐵區間盾構隧道采用掃描儀得到的導高檢測結果(部分)
1.4 誤差來源分析
在進行處理導高檢測結果時發現,隧道斷面點云模型中存在毛刺,如圖5所示。接觸網點云模型中的毛刺會直接影響導高檢測精度。
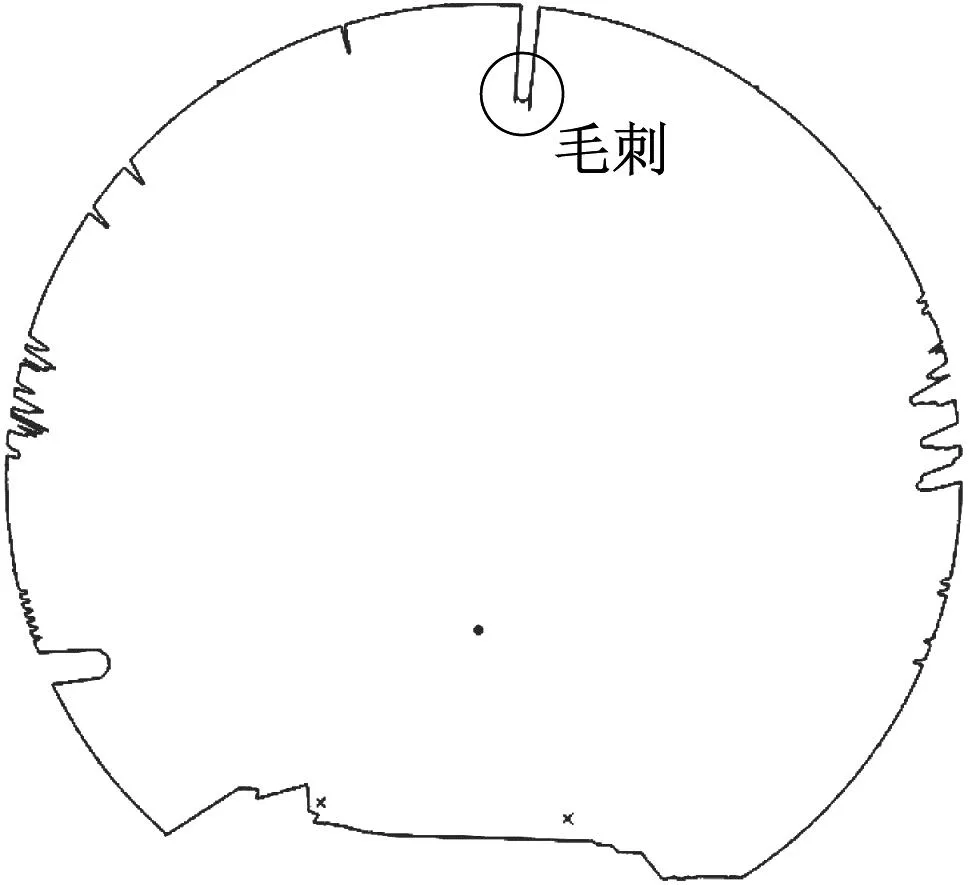
圖5 隧道斷面點云模型中的毛刺
經研究,接觸導線及匯流排因同受電弓長期接觸摩擦,其表面光滑且反射率較高,故而形成激光腳點(單個激光脈沖在物體表面的反射區域)。這些激光腳點在垂直入射接觸網時會發生散射和漫反射,進而產生毛刺等噪點。為了減少激光的散射和漫反射,本文嘗試采用改變激光入射角度來降噪。
2 降噪策略
2.1 改變掃描儀激光線入射角度
原掃描儀的激光掃描平面垂直于隧道中線,掃描激光線也垂直入射接觸網。原掃描儀的掃描激光線入射示意圖如圖6所示。原掃描儀由多個傳感器剛性連接,具有組裝靈活且穩定的特點。基于此,為了降低激光腳點散射和漫反射,本研究采用預制固定傾斜角度的剛性傾斜組件來改變掃描儀的激光線入射角度,之后根據激光線入射角度對點云模型的坐標進行投影轉換,即可得到真實的接觸網點云模型。
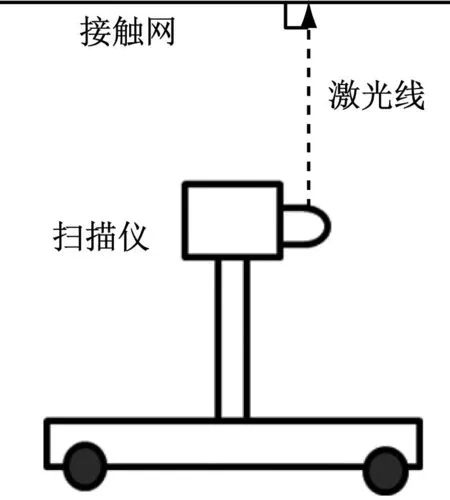
圖6 原掃描儀的掃描激光線入射示意圖
剛性傾斜組件樣式如圖7所示。剛性傾斜組件通過8個螺栓孔和中間卡槽,通過掃描儀的運載部件同掃描儀連接。剛性傾斜組件底面平整,表面傾斜。其傾斜的表面會使掃描儀產生傾角,進而改變掃描激光線的入射角度。
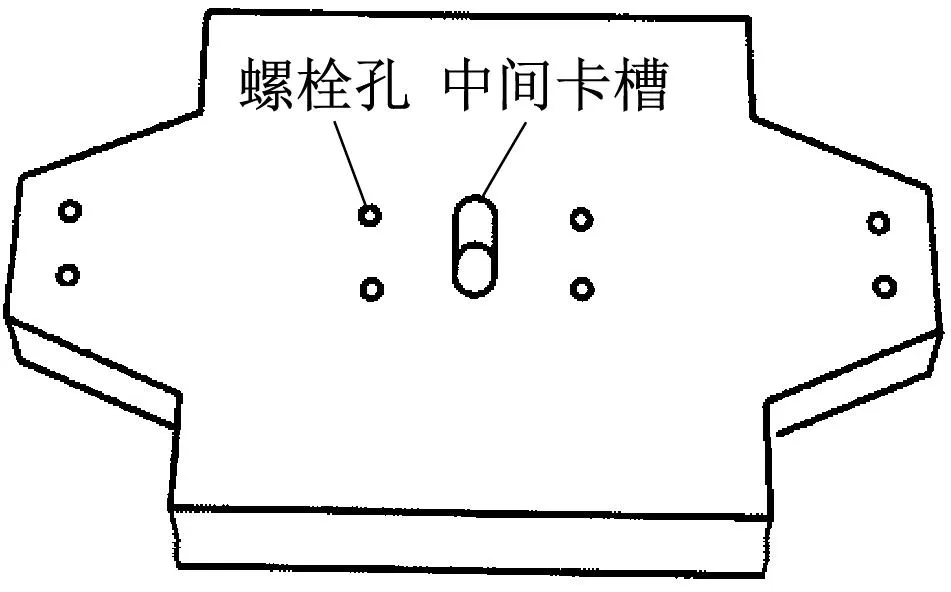
圖7 剛性傾斜組件示意圖
加裝剛性傾斜組件后,改進的掃描儀掃描激光線入射示意圖如圖8所示。經試驗驗證,此項改進可減弱激光腳點散射和漫反射。
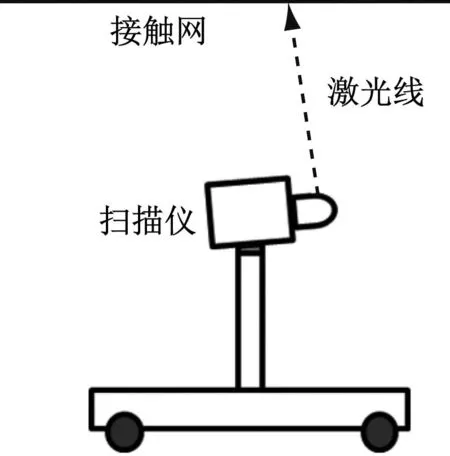
圖8 改進的掃描儀掃描激光線入射示意圖
2.2 點云投影模型
由于掃描儀采用線掃描模式進行數據采集,點云模型是由無數掃描斷面拼接而成,因此當掃描斷面不垂直于隧道中線時,掃描斷面為圖9中的虛線橢圓,而非隧道真實結構。欲得到隧道真實點云模型,需要對實測斷面進行等角蘭勃特投影。改進掃描儀后,隧道掃描斷面的等角蘭勃特投影斷面如圖9所示。由于剛性傾斜組件的傾斜角度是預先設定的,故可根據已知傾斜角度對掃描斷面進行投影。
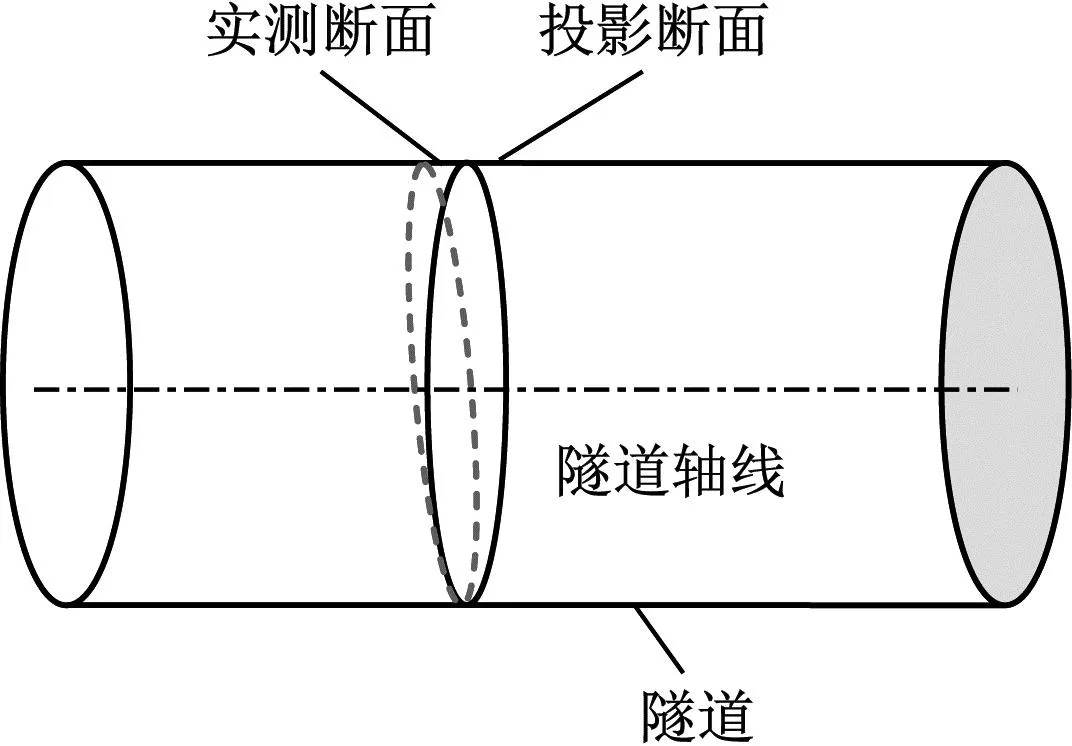
圖9 等角蘭勃特投影斷面
2.3 降噪效果
為了驗證加裝剛性傾斜組件后的掃描儀檢測精度提升效果,采用無傾斜組件的掃描儀和有傾斜組件的掃描儀,分別對同一區域進行掃描,并對采集數據進行處理和比較。加剛性傾斜組件后得到的投影斷面如圖10所示。對比圖5和圖10可見,增加傾斜組件,可有效降低因激光腳點垂直入射接觸網發生散射和漫反射而產生的毛刺等噪點,進而提高導高檢測精度。

圖10 加剛性傾斜組件時的投影斷面
3 降噪后掃描儀的檢測精度驗證
為了驗證加裝剛性傾斜組件后的掃描儀檢測精度,本研究分別使用導高儀和掃描儀測量,采用導高儀對改進后掃描儀的導高檢測結果進行驗證,將同一位置處的導高進行對比。
3.1 驗證步驟
為驗證檢測結果的準確性,本測試采用固定點測量,保證導高儀和掃描儀嚴格測量同一位置處的導高值和拉出值。
驗證的具體步驟如下:
步驟1 選取測量位置。測量位置應選在地質情況比較好的區間內,以避免在詳測時因工程地質問題發生較大變動。以每10環確定一個測量位置,并用石筆標記。
步驟2 現場記錄。推動導高儀,按照步驟1選取的測量位置,采用外業記錄表記錄測量位置里程;推動掃描儀到測量位置,測量導高和拉出值,并用外業記錄表記錄相應測量位置處的里程、環號、導高、拉出值。
步驟3 內業處理。利用Amberg Rail內業處理軟件提取導高儀測量位置對應斷面,并將斷面導入CAD軟件中,利用量距功能量取接觸網導高和拉出值,與掃描儀的測量數據進行對比。
3.2 導高檢測結果
3.2.1 檢測結果對比
檢測精度驗證共選取69個檢測斷面(第1環—第680環)的導高和拉出值進行對比測量。不同設備的導高檢測結果對比如表2所示。
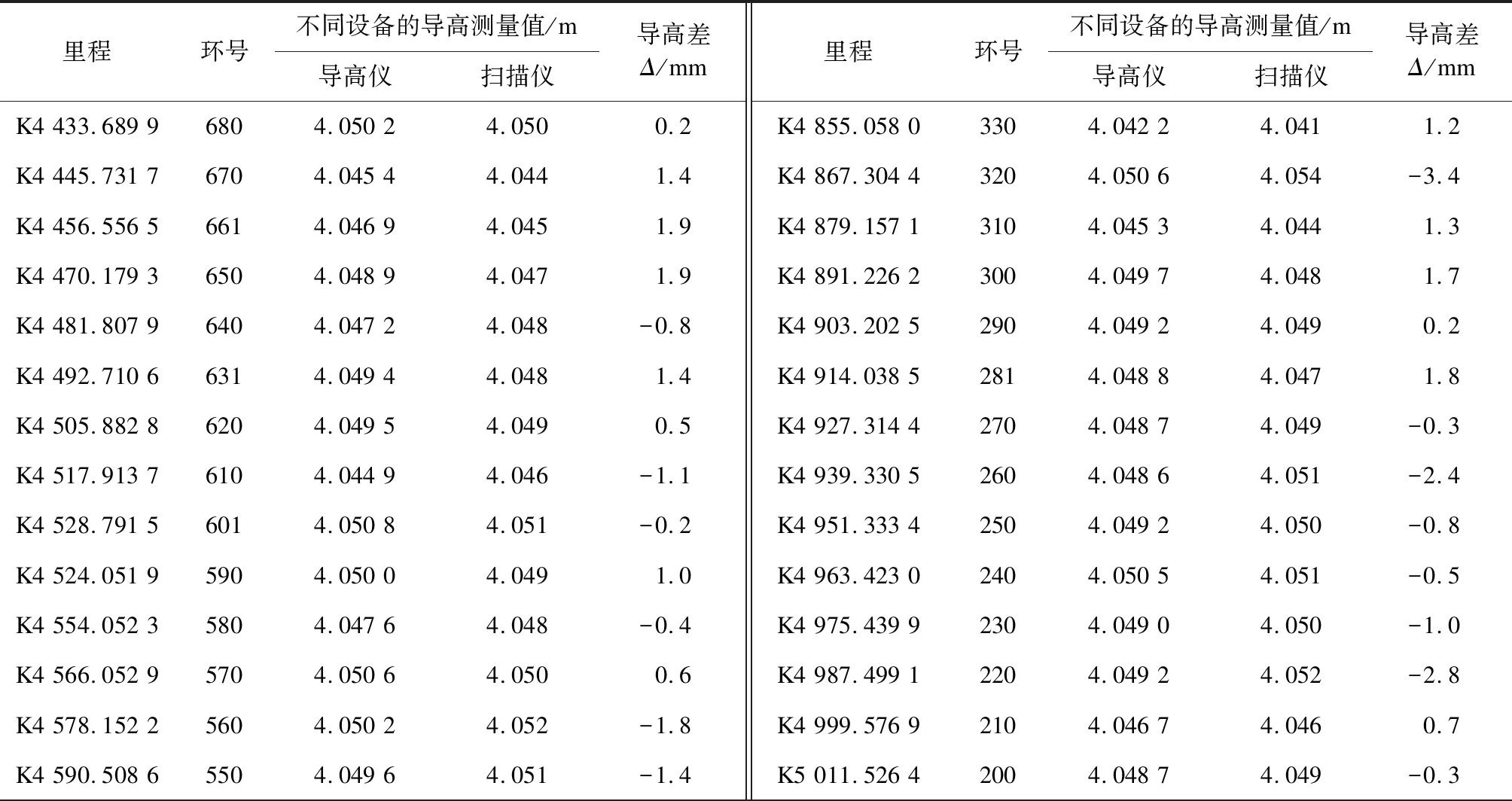
表2 不同設備的導高檢測結果
3.2.2 數據統計分析
由表2數據可得導高差Δ的統計結果,如表3所示。
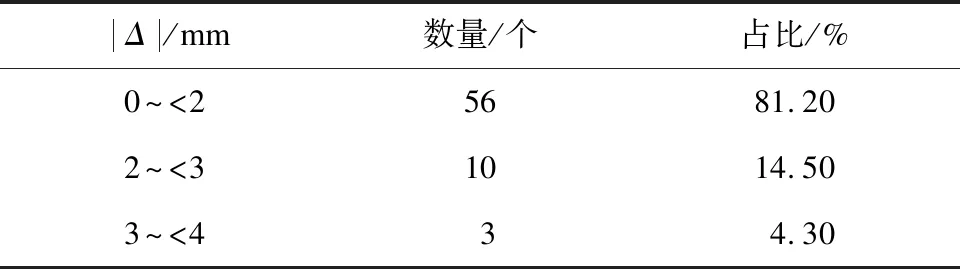
表3 Δ的統計結果
由表3可見,掃描儀的導高檢測精度基本在±3 mm以內。根據GB 50299—2018《地下鐵道工程施工及驗收標準》,地面導高允許偏差為±30 mm,隧道內導高允許偏差為±10 mm。對比表1和表3可見,改進后的掃描儀導高檢測精度有所提高,已滿足相關要求。
4 結語
本文基于移動掃描儀技術提出了地鐵隧道接觸網導高檢測的新方法,并分析了誤差來源;通過增加剛性傾斜組件來改變掃描儀激光線入射角度,進而減少掃描斷面毛刺數量,并采用等角蘭勃特投影來獲取隧道真實點云模型。與導高儀的測量對比結果表明,改進后的掃描儀精度基本為±3 mm,滿足相關規范要求,為實現快速、高精度、不接觸、無盲區的地鐵隧道導高檢測提供了保障。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19