機載激光雷達在房地一體地形測繪中的應用
2024-02-22 09:48:00胡開桂
科學技術創新 2024年3期
胡開桂
(廣西壯族自治區國土測繪院,廣西 南寧)
1 技術背景
激光雷達(LiDAR)測量技術是集成了激光測距系統、全球定位系統(GPS)和慣性導航系統(INS)三種技術于一身,獲取高時空分辨率的地球空間信息的一種全新技術手段。是一種利用激光反射和時延分析建立精確地表模型的精密地形測量技術,主要依賴光探測和測距來測量高程數據,根據激光脈沖和反射測量以確定高度。激光雷達測繪采用激光發射和探測技術、掃描和控制力學、全球定位系統和慣性測量單元(IMU),計算目標反射面的精確XYZ 坐標,具有垂直精度高、數據效率高等優點。激光雷達按照搭載平臺的不同,分為機載模式,車載模式,背包模式。
2 技術路線
基于無人機LiDAR 測量系統的地形測量主要作業流程包括項目踏勘、項目設計、無人機航線布設、實地外業航測實施(LiDAR 數據采集和影像獲取)、地面控制測量實施、內業POS 解算、空三數字加密解算、點云數據處理、影像數據處理、數字高程模型DEM生產和正射影像DOM生產、地形地物要素采集、地形圖等高線數據繪制、地形圖整飾及精度檢查等,其流程見圖1。
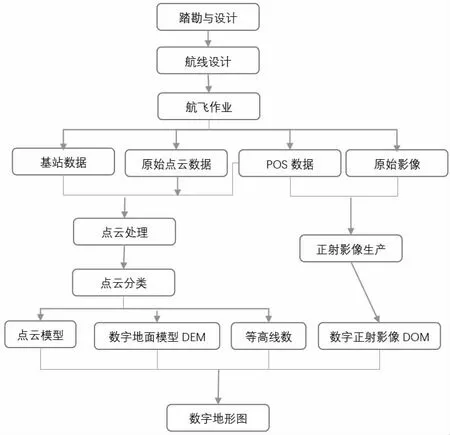
圖1 作業流程圖
3 作業應用
以廣西壯族自治區梧州市岑溪市城諫鎮大新村房地一體項目為例。
3.1 實地現場踏勘
現場踏勘作業,需要結合實驗區域具體的實際情況,查清測區內部的通信塔、高壓塔以及高大建筑物,并進行綜合考慮,采取有效措施合理規避其對飛行和數據獲取的干擾問題,保障飛行作業的安全和數據獲取的順利進行。在開展實際生產施工操作的前期階段,需要從改項目去的房地一體測量范圍入手,對測區的地形地貌資料及當地影像資料收集分析,確定無人機的飛行范圍并計算航飛高度等,促進實地現場踏勘作業的順利實施。
在開展現場踏勘作業時,應與當地區域的相關主管部門保持聯系,在當地公安部門的幫助下,確保現場勘探人員能夠與相關行政主管單位進行協調,確保現場踏勘工作能夠順利實施。在現場踏勘作業的實施階段,應提前掌握無人機的飛行范圍以及確定航飛路線,為測區項目制定明確的作業任務,確保無人飛機起降點篩選合理和保證GNSS基站建設得到落實。在無人機載激光雷達系統的運行過程中,保障測繪作業的安全性。
3.2 點云數據獲取
首先,需要結合現場條件,保障區域篩選的合理性,基站架設作業的實施階段,為其提供充足的基礎支持。同時,應加大對基站架設作業的控制力度,保障架設半徑設置的科學性,使其能夠保持在5 km左右。衛星觀測角度設置應控制在15°左右,且觀測衛星的總量,大于18 顆以上。通過對基站采樣率分析,可得最佳采樣率應保持在5 Hz左右。當信號發射塔遠離基站時,應將兩者之間的距離控制在200 m 以上,且高壓線應控制在50 m以外。待基站架設作業完成后,需要采用2 次測定形式,采用間斷測定的方法,及時獲取與基站大地相關坐標信息,通過計算平均值,在基站點的設置過程中,將其作為基礎坐標。
其次,在數據采集作業的實施過程中,待飛行參數設置作業完成后,應合理應用手持軟件,獲得更加完善的數據采集信息。通過分析設備的性能參數,在綜合考慮的基礎上,從實驗區域出發,加大對激光線速度的控制力度。在一般情況下,應將其設置為120 線/s,且激光點的頻率應保持在550 kHz左右,將最大測距標準控制在300 m 左右。對于起始角的角度來說,應將其設置為106°,而中直角則需要保持在254°左右。在開展數據采集作業的過程中,應嚴格按照前期階段的航線規劃要求,將數據采集做的時間控制在20 min 左右,順利完成試驗區數據采集作業任務。
最后,在無人機外業數據采集作業完成后,應在后續整合階段,確保無人機能夠準確降落,并對降落后無人機設備的運行狀況予以檢查,提出有針對性的維護措施,避免對無人機帶來損傷。在降落階段,還應檢查無人機的數據,確保無人機能夠全部回收,對數據信息進行備份處理。
本項目數據采集使用曜宇Yunux-Long120 無人機搭載中海達ARS-1000L 激光測量系統進行數據獲取,主要獲取的數據有點云數據、影像數據和POS 數據等原始數據,同時采用測量型GNSS接收機對測區進行高程檢查點采集和基站數據的采集。按照農村房地一體項目相關規范要求,正射影像地面分辨率優于0.05 m,點密度500-600 個/平方米,相對航高130 m,航向重疊度為55%,旁向重疊度為70%,采用編制的航測參數計算軟件計算出外業飛行參數。實現全村房屋范圍地形全覆蓋測繪。本測區獲取的原始數據有點云數據、pos 數據、影像數據以及基準站靜態GNSS數據等,見圖2。

圖2 曜宇Yunux-Long120 無人機和中海達ARS-1000L激光測量系統
3.3 點云數據生產
在完成數據采集作業后,需要及時將相關數據信息導入到電腦系統中,并借助專業化的軟件形式,對激光雷達系統數據進行處理,促進預處理工作順利實施。將業內數據處理環節進行細致劃分,通常是以定位定姿系統位置解算和點云解算這兩個階段為主。
一方面,通過對定位定姿系統位置解算階段加以分析,可以看出需要結合基點數據的實際情況,將其與移動站GPS 數據IMU 數據以及里程計數據進行整合,形成完整的組合形式,促進解算作業的順利實施,確保所輸出的定位定姿數據能夠具備精準性。此外,使用專業的處理軟件,為數據處理工作的開展提供支持,形成完善的導航信息組合,確保信息內容的精準性。
另一方面,在點云解算階段,應結合無人機在激光雷達系統實際情況,結合多個傳感器的測量數據,形成完善的數據配準模式,加強各項數據之間的融合力度,進一步分析被測目標情況,結合三維幾何空間坐標,對相關屬性予以充分還原。另外,使用專業軟件對采集階段的原始數據予以妥善處理。采用融合處理生成點云文件信息,將此類數據信息應用于其他系統軟件中,促進后續數據處理作業的有序進行。
本項目點云數據的處理主要對航攝獲取的原始數據進行POS 解算、點云融合、點云濾波和點云分類等工作。
LiDAR 數據的處理主要步驟分為3 步,POS 解算、點云融合和點云后處理。3 個步驟分別在Inertial Explorer 8.70、HDDataCombine 海達融合軟件、Terrasolid軟件中完成。LiDAR 原始數據記錄的脈沖發射角度、脈沖發射與返回時間、脈沖返回強度、回波的次數等信息,在海達融合軟件中加載激光原始數據RXP 文件及航跡文件,設置系統檢校參數、坐標變換矩陣,根據激光點反射率及距離進行粗濾波過濾噪點,并將其轉換為LAS 點云通用格式文件,最后在Terrasolid 軟件中進行點云精分類獲取高精度著色地面點數據,采用Terrasolid 軟件進行點云質量檢查,主要檢查以下幾點:(1)點密度檢查;(2)航帶相對誤差檢查;(3)絕對精度檢查。
正射影像的數據處理采用Pix4dMapper 軟件生產。主要步驟有:(1)新建工程,導入影像、POS 數據,設置相機參數;(2)自由網平差,控制網平差,優化處理;(3)生成密集點云;(4)生成DSM成果;(5)生成DOM成果。
生產成果主要有點云數據成果(圖3)、數字高程模型DEM及等高線(圖4)、數字正射影像DOM。

圖3 點云成果
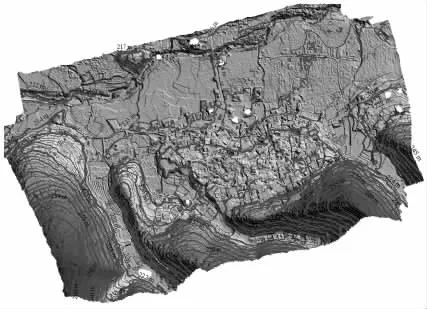
圖4 DEM成果(疊加等高線)
3.4 EPS軟件三維點云測圖
在房地一體測繪作業的實施過程中,為了保證最終測繪結果的精準程度,需要在采集數據的過程中,對點云高程切片進行調整,保障房屋邊點云數據的清晰程度,為采集作業的順利實施提供充足的數據支持。在全面檢查點云數據的過程中,應嚴格按照地籍測圖作業的規范要求,對點云數據進行全面轉換,使其能夠形成以矢量測圖軟件的格式,通過對數據的全面加載,完成階段性的數據采集任務。
對于部分缺乏清晰性的邊線和房角來說,應按照具體要求,結合內業測圖進行處理,要求外人員能夠結合每一條房邊,促進外業勘丈工作的順利實施。不僅如此,還需要在房屋測繪數據采集作業中,以按邊采集的方式,對無法確定的房角進行標記,保障標記的清晰性與明確性,及時返回外業核查作業階段。與此同時,還需要對圖面進行檢查,若出現遺漏或者錯誤等情況時,還應對錯誤環節予以修改。
本項目測圖采用EPS2016 測圖軟件對生成的點云數據(las 格式)轉化為.pcd 格式數據進行導入,在點云高程切片視圖中采用多點交會法和直接從點云采集房屋邊線的方法成圖(如圖5),加載正射影像數據進行平面地物的矢量化。利用EPS成圖系統將等高線和地形矢量圖進行拼接,生產要素完整的符合規范要求的房地一體地形圖,圖內各要素及地物符號嚴格按照圖式規定進行繪制編輯。最終得到房地一體地形圖數據成果。

圖5 地物繪制
4 精度檢查
對于本測量任務區來說,在順利完成作業后還需要采用人工檢查核對的方法,以人機交互的檢查形式對實驗區的測圖成果進行檢測,對間距精度加以驗證,確保點位設置的精確性,滿足房地一體測繪作業的質量要求。
一方面,應保障點位的精準度。通過分析外業實測數據,并對點云數據予以綜合考慮,全面對比實際所采集的圖形數據,合理應用數據抽檢方法,以人工檢查形式為主,仔細核對信息對比結果,發揮出人機交互檢查方式實效性,從實驗區域出發,形成優質的測圖檢測質量。
另一方面,應結合外業踏丈距離,將其與內業出圖標注距離進行對比,在全面驗證的過程中,可以看出部分邊長能夠保持在1 cm~2 cm的區間范圍內,且間距的精準程度能夠滿足1.5 cm的標準,并且符合房地一體測繪作業要求。
房地一體項目規范對高程精度要求為優于0.15 m,要求較低,本次實例不對高程精度做檢查。平面精度檢測采用外業實測方法,實測13 個檢查點,點云精度平面中誤差為0.065 m,優于房地一體規范的0.075 m,滿足房地一體地形圖的要求。檢查成果見圖6。
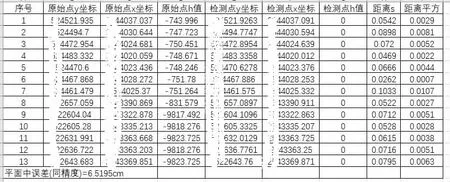
圖6 平面精度檢查表
5 結論
機載LiDAR 系統獲取地面三維數字數據具有全天候高精度、高機動性和低成本等優點,在各行業中都具有廣泛的應用前景,通過本次案例和精度分析可以得到如下結論:(1) 數據產品豐富:數字表面模型(DSM)、正射影像(DOM)、數字高程模型(DEM)、數字線劃圖(DLG)。(2) 成果精度高:機載激光雷達技術能夠獲取到大量高精度地形表面數據,而且數據精度高,可以滿足應用需求。(3) 約束條件少:激光雷達可穿透茂密植被的縫隙直達地面,不受光照和陰影的限制。(4) 生產效率高:應用機載激光雷達技術可以快速獲取到大范圍、大區域內的地表信息和空間信息,無需布設大量像控點和檢查點,極大減少了外業工作量,縮短作業時長,快速完成項目作業。
結束語
無人機載激光雷達系統在房地一體測繪作業中能夠保障點云數據的精準程度,在矢量測圖軟件的共同作用下,完成階段性的房地一體化測繪生產實驗任務。在使用無人機載激光雷達系統時,不僅能夠滿足精確度等方面的要求,還可以在提高回波技術的應用頻率,使其能夠順利穿透植被,并且解決覆蓋度等方面的問題,獲得更加精準的測量結果,發揮出無人機載激光雷達系統的應用優勢,在房地一體測繪精度、成本以及工期等方面得以體現。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21