加載系統(tǒng)迭代學(xué)習(xí)控制器設(shè)計與控制算法研究
2024-02-21 06:00:06李沛轍白國振
軟件導(dǎo)刊 2024年1期
關(guān)鍵詞:系統(tǒng)
李沛轍,白國振
(上海理工大學(xué) 機械工程學(xué)院,上海 200082)
0 引言
隨著科學(xué)技術(shù)的大力發(fā)展,國防軍工、汽車制造、航空航天等領(lǐng)域,對于某些重要零件的性能要求越來越嚴格,可以模擬真實工作環(huán)境的加載系統(tǒng)應(yīng)用也越來越廣泛[1-2]。加載系統(tǒng)在工程上通常被稱為負載模擬器,是指在實驗室等非真實環(huán)境下對被測零件進行模擬性負載測試的實驗設(shè)備[3]。加載系統(tǒng)分為多種,主要包括磁粉加載系統(tǒng)、電液伺服加載系統(tǒng)、氣動加載系統(tǒng)、電動伺服加載系統(tǒng)[4-5]等。
根據(jù)近年來研究論文可以看出,電動伺服加載是現(xiàn)階段研究的重點,但電動伺服加載的控制難度很高[6-8]。為了更好地對電動伺服系統(tǒng)進行控制,學(xué)者們提出了多種控制算法,主要有滑模算法以及PID(Proportion Integration Differentiation)控制算法。隨著智能控制和計算機技術(shù)的發(fā)展,智能控制算法與傳統(tǒng)算法結(jié)合應(yīng)用的場合越來越多[9]。
人類自出生以來對世界的認知就是通過反復(fù)學(xué)習(xí)來完成的,學(xué)習(xí)在認知過程起到十分重要的作用。根據(jù)這一學(xué)習(xí)方法,工程控制領(lǐng)域誕生了智能控制的分支——學(xué)習(xí)控制。日本學(xué)者Uchiyama[10]最先提出了迭代學(xué)習(xí)控制理論,經(jīng)過眾多學(xué)者的研究,迭代學(xué)習(xí)在理論和應(yīng)用上都有了新的進展和突破[11-12]。近些年學(xué)者開始將迭代學(xué)習(xí)與其他算法進行結(jié)合,例如黃文文等[13]設(shè)計了一種學(xué)習(xí)增益在線自適應(yīng)調(diào)節(jié)的P 型迭代學(xué)習(xí)控制策略,加快了超聲波電機轉(zhuǎn)速控制的收斂速度,但是在自適應(yīng)的調(diào)整方面還是依據(jù)實測數(shù)據(jù)給出,不具備自適應(yīng)算法的普適應(yīng);何焯毅[14]將迭代學(xué)習(xí)算法應(yīng)用于永磁同步電機中,并且通過實驗證明了迭代學(xué)習(xí)算法對永磁同步電機控制的有效性,但是缺乏與其他算法的結(jié)合,迭代學(xué)習(xí)的次數(shù)較多;殷春武[15]將滑模控制和迭代學(xué)習(xí)做了有效結(jié)合,增強了迭代學(xué)習(xí)控制器的魯棒性,但是對數(shù)學(xué)模型要求較高,失去了迭代學(xué)習(xí)不依賴數(shù)學(xué)模型的優(yōu)點。
本文從改善電動伺服加載效果的目的入手,結(jié)合電動伺服加載系統(tǒng)的周期性特點,設(shè)計了一種基于模糊控制的迭代學(xué)習(xí)控制器,能夠在保留迭代學(xué)習(xí)優(yōu)越控制效果的同時大大減少迭代次數(shù),彌補迭代學(xué)習(xí)算法學(xué)習(xí)迭代次數(shù)多的缺點,使其更快地達到所指定的扭矩曲線。同時,其不依賴系統(tǒng)自身的參數(shù),實現(xiàn)效果好。本文的創(chuàng)新性在于將模糊控制與迭代學(xué)習(xí)控制器結(jié)合,能夠自適應(yīng)調(diào)整學(xué)習(xí)律的增益,能夠加快收斂速度,減少收斂次數(shù),并且很好地應(yīng)用于電動伺服加載系統(tǒng)中,取得了較好的扭矩曲線跟蹤效果,并且保留了迭代學(xué)習(xí)控制器不依賴數(shù)學(xué)模型這一優(yōu)點。
1 迭代學(xué)習(xí)控制器
1.1 迭代學(xué)習(xí)概論
迭代學(xué)習(xí)控制的原理為:在期望軌跡周期時間段[0,T]中,期望軌跡yd(t)已知。通過迭代學(xué)習(xí)尋找合適的離散化輸入控制u(t),使得系統(tǒng)輸出y(t)在區(qū)間[0,T]上對期望軌跡的跟蹤達到較好的控制效果。迭代學(xué)習(xí)關(guān)鍵在于通過迭代的方法尋找合適的輸入,將輸出的誤差用于構(gòu)建輸入控制信號的學(xué)習(xí)律,經(jīng)過迭代,生成收斂于u(t)的函數(shù)序列{uk(t)}。學(xué)習(xí)律的形式如(1)、(2)所示:
式中:k=0,1,2,3…為迭代次數(shù)。
迭代學(xué)習(xí)算法的流程圖如圖1所示。

Fig.1 Algorithm flow chart of iterative learning圖1 迭代學(xué)習(xí)算法流程
迭代學(xué)習(xí)的學(xué)習(xí)律可以采用PID 控制、神經(jīng)網(wǎng)絡(luò)、自抗擾控制等控制理論,從而實現(xiàn)迭代學(xué)習(xí)與其他控制方法的融合,更好地推動控制理論的發(fā)展。
1.2 迭代學(xué)習(xí)控制的特點
迭代學(xué)習(xí)在具有重復(fù)性被控對象的控制系統(tǒng)中應(yīng)用較為廣泛,其并不依賴于被控系統(tǒng)數(shù)學(xué)模型的建立,可以簡化或者省略被控系統(tǒng)的參數(shù)辨識估計等復(fù)雜繁瑣的計算。
迭代學(xué)習(xí)控制是在時間軸t和離散軸k兩個軸同時進行的,t和k軸具有完全的相關(guān)性,可以說k就是t的離散形式。
假設(shè)非線性系統(tǒng)如(3)、(4)所示:
式中:k為迭代循環(huán)次數(shù)。迭代學(xué)習(xí)特性如下:①迭代學(xué)習(xí)控制最終目的是得到期望的輸出,并不依賴數(shù)學(xué)模型;②被控系統(tǒng)的期望輸出具有周期性,每次時間間隔為周期T;③被控系統(tǒng)期望輸出yd(t)是給定的已知量,且為關(guān)于時間t的函數(shù);④被控系統(tǒng)每次迭代運行的輸出yd(t)可測量,誤差信號可求得;⑤被控系統(tǒng)的結(jié)構(gòu)不變;⑥被控系統(tǒng)迭代時初始狀態(tài)應(yīng)在期望軌跡上;⑦被控系統(tǒng)控制量uk+1(t)的遞進規(guī)律滿足式(5)。
迭代學(xué)習(xí)控制適用于滿足以上要求的系統(tǒng),經(jīng)過有限次迭代可以達到較好的控制效果。
1.3 迭代學(xué)習(xí)控制器設(shè)計
電動伺服加載系統(tǒng)是由負載電機和加載電機經(jīng)過連接件連接的被動加載系統(tǒng)。對于電動伺服加載系統(tǒng)而言,一般給定一個周期性的控制信號,對測試部件進行扭矩疲勞測試實驗,所以迭代學(xué)習(xí)控制在電動伺服加載系統(tǒng)中較為適用。
加載系統(tǒng)的控制結(jié)構(gòu)框圖如圖2所示。
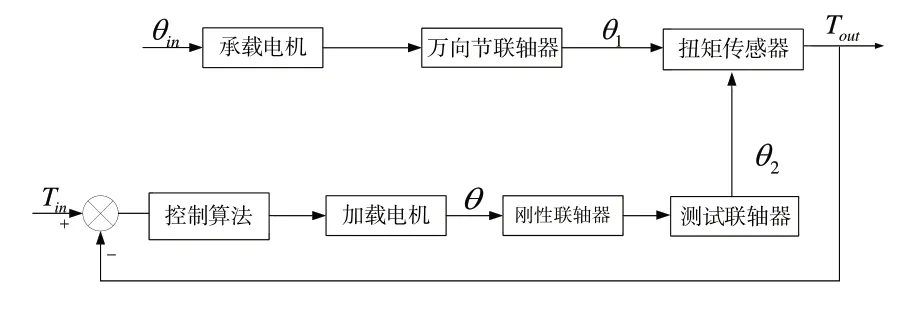
Fig.2 Control structure block diagram of loading system圖2 加載系統(tǒng)的控制結(jié)構(gòu)框圖
由加載系統(tǒng)的結(jié)構(gòu)可知,控制算法主要由加載電機的扭矩控制。為了實現(xiàn)更好的控制效果,設(shè)計PD 形學(xué)習(xí)律的迭代學(xué)習(xí)控制器,迭代公式如式(6)、(7)所示:
式中,KP,KD為比例微分系數(shù);ek為輸出誤差;N為一個周期內(nèi)的總序列數(shù)。
在實際的實驗中發(fā)現(xiàn),在迭代到一定程度時,輸出的軌跡已經(jīng)實現(xiàn)了對輸入控制的跟隨,但此時迭代學(xué)習(xí)依舊在進行迭代,對下一次的控制進行修正,最終迭代學(xué)習(xí)會產(chǎn)生發(fā)散問題,導(dǎo)致迭代學(xué)習(xí)控制的失效。此時控制失效與學(xué)習(xí)律PD 值沒有關(guān)系,PD 值的大小只與達到發(fā)散的時間點長短有關(guān),控制失效的狀態(tài)表現(xiàn)為扭矩的發(fā)散,發(fā)散情況如圖3所示。
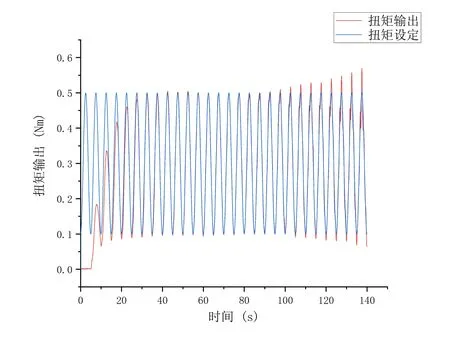
Fig.3 Divergence of loading torque based on iterative learning algorithm圖3 迭代學(xué)習(xí)算法加載扭矩的發(fā)散
迭代學(xué)習(xí)的數(shù)學(xué)推導(dǎo)證明迭代學(xué)習(xí)算法是收斂的,但是控制系統(tǒng)的滯后現(xiàn)象導(dǎo)致了收斂條件的破壞。為了解決這一問題,引入均方根誤差,解決了無限次迭代產(chǎn)生的超調(diào)發(fā)散現(xiàn)象。均方根誤差的計算公式如式(8)所示:
迭代學(xué)習(xí)的一個重要指標是迭代次數(shù),在輸出軌跡穩(wěn)定不發(fā)散的前提下,為更好地優(yōu)化迭代學(xué)習(xí)控制器的性能,設(shè)計了改進的迭代學(xué)習(xí)控制器。
2 改進迭代學(xué)習(xí)控制器
為了減少迭代次數(shù),需要一種合適的算法來優(yōu)化迭代學(xué)習(xí)控制器。模糊控制算法一般根據(jù)專家經(jīng)驗對控制對象進行處理,不依賴于控制系統(tǒng)的數(shù)學(xué)模型,能有效地對控制輸出作出合理的響應(yīng)。模糊控制具有自適應(yīng)功能,能夠根據(jù)反饋調(diào)節(jié)輸出參數(shù),具有速度快、穩(wěn)定性好的優(yōu)點[16-18],所以本文將模糊控制與迭代學(xué)習(xí)相結(jié)合,設(shè)計了二維模糊控制器對迭代學(xué)習(xí)的學(xué)習(xí)律參數(shù)進行優(yōu)化。
模糊控制是通過設(shè)定的模糊規(guī)則來進行控制量的在線規(guī)劃與調(diào)整。除了單一的模糊控制以外,模糊控制常與PID控制結(jié)合,模糊PID控制器也被應(yīng)用于扭矩加載系統(tǒng)中,能夠通過模糊控制在線調(diào)試PID 的比例、積分、微分參數(shù),使得力矩跟蹤的響應(yīng)速度得到明顯提高,也對非線性和不確定因素起到了更好的控制效果。但是模糊控制PID 也有缺點,其控制精度較低,對穩(wěn)態(tài)誤差的消除效果較差。本文采用模糊控制與迭代學(xué)習(xí)相結(jié)合的形式,既優(yōu)化了模糊控制精度低的問題,又改善了迭代學(xué)習(xí)迭代速度慢的問題。
模糊控制系統(tǒng)將被控對象的輸出值與系統(tǒng)給定的輸入值進行對比得到誤差信號,將誤差信號作為模糊控制器的輸入值,輸入值經(jīng)過隸屬度函數(shù)進行模糊化處理,隸屬度函數(shù)主要有高斯型、三角型、S 型等。根據(jù)模糊規(guī)則進行模糊關(guān)系的推理,最后再進行模糊輸出。將控制量施加到被控對象上,實現(xiàn)模糊控制。
模糊控制器的結(jié)構(gòu)主要包括論域的設(shè)計、輸入變量的模糊化、模糊規(guī)則的設(shè)計和模糊輸出。
本文設(shè)計的模糊控制器為二維,選取誤差e和誤差變化率ec兩個輸入。因為迭代學(xué)習(xí)的參數(shù)并非實時變化,所以本文采取誤差以及誤差變化率在周期內(nèi)絕對值的平均值作為模糊控制器的輸入?yún)?shù),如式(9)、(10)所示。
模糊輸出的方法采用重心法來進行反模糊,迭代次數(shù)的多少主要與學(xué)習(xí)律的KP值有關(guān),所以取ΔKp為模糊輸出變量,此時模糊控制后的學(xué)習(xí)律輸出參數(shù)為式(11)。
在每次周期性輸出結(jié)束時進行PD 學(xué)習(xí)律參數(shù)KP的自動調(diào)整。圖4為模糊控制原理框圖。

Fig.4 Principle block diagram of fuzzy control圖4 模糊控制原理框圖
輸入變量和輸出變量分為7 部分,分別為NB、NM、NS、ZO、PS、PM、PB。ekn的取值范圍為[-0.5,0.5],eckn的取值范圍為[-0.005,0.005],ΔKp的取值范圍為[-10,10]。本文選取三角隸屬度函數(shù)。
針對電動伺服加載系統(tǒng)對響應(yīng)要求高,且迭代學(xué)習(xí)算法迭代速度慢的特點,設(shè)計可以在誤差較大時加快迭代速度、減少迭代次數(shù)的模糊規(guī)則。最終ΔKp的模糊控制規(guī)則見表1。

Table 1 Fuzzy control rule of ΔKp表1 ΔKp的模糊控制規(guī)則
加入模糊控制后,在迭代學(xué)習(xí)的初期誤差較大時,模糊控制會增加學(xué)習(xí)律的KP值,以加快響應(yīng),減少迭代次數(shù)。同時在誤差較小時減少KP的值,防止產(chǎn)生超調(diào),使加載系統(tǒng)的扭矩控制精度更高。
3 實驗平臺搭建與實驗驗證
3.1 實驗平臺搭建
本試驗臺的搭建目的是完成高精度的扭矩跟隨,并且對本文提出的改進迭代學(xué)習(xí)控制器進行驗證。圖5 為加載實驗臺框架,圖6 為實驗平臺控制系統(tǒng)結(jié)構(gòu)。整個實驗臺包括控制部分、執(zhí)行部分、測量部分、連接部分。

Fig.5 Loading test bench frame圖5 加載實驗臺框架
3.1.1 控制部分
工控機是加載平臺的信息處理部分,負責(zé)系統(tǒng)的整體運動控制、信號采集和圖形化數(shù)據(jù)。選用倍福公司的C6920-0040,此工控機結(jié)構(gòu)緊湊,實時性較高,能夠進行毫秒級運算和控制。數(shù)字IO 采用倍福公司的E-BUS 耦合器和EtherCATI/O 端子模塊,耦合器功能為連接EtherCAT 和EtherCATI/O 端子模塊,通過以太網(wǎng)進行數(shù)據(jù)通信。軟件層面采用倍福公司的Twincat3 軟件平臺,使用ST 語言進行高級語言編程,實現(xiàn)算法。
3.1.2 執(zhí)行部分
根據(jù)實驗臺的要求,執(zhí)行部分主要由加載端電機和驅(qū)動端電機構(gòu)成。位置電機為松下伺服電機,其型號為MSMF012L1U2M,對應(yīng)的驅(qū)動器型號為MSMF012L1U2M。其響應(yīng)頻率高,適用于高精度、高頻率的工作環(huán)境。通過以太網(wǎng)與控制器進行通訊,實現(xiàn)電機的運動控制。加載電機為三菱伺服電機,其型號為HG-KR43J,對應(yīng)的驅(qū)動器型號為MR-J4-40A。負載電機自帶高分辨率編碼器,可以實現(xiàn)高精度、高速度轉(zhuǎn)動。負載電機通過倍福模塊進行連接,根據(jù)模擬量進行扭矩控制。
3.1.3 測量部分
本試驗臺采用扭矩加載試驗臺。在試驗過程中,由于電機長時間高速運轉(zhuǎn),常規(guī)的接觸式扭矩傳感器無法滿足試驗要求,因此本文選用DYN-200號傳感器。
3.1.4 連接部分
聯(lián)軸器是加載系統(tǒng)中必不可少的連接件,能夠進行扭矩的傳遞,還能起到減震和緩沖的作用。為了得到更好的試驗臺性能,選取剛性聯(lián)軸器和萬向節(jié)聯(lián)軸器,剛性聯(lián)軸器的剛度大,對扭矩的傳遞響應(yīng)比較迅速,傳遞精度也更好;萬向節(jié)聯(lián)軸器的傳遞精度高,并且具有克服偏心的作用,能夠很好地彌補安裝時造成的同軸度誤差。
加載實驗平臺實物為圖7所示。
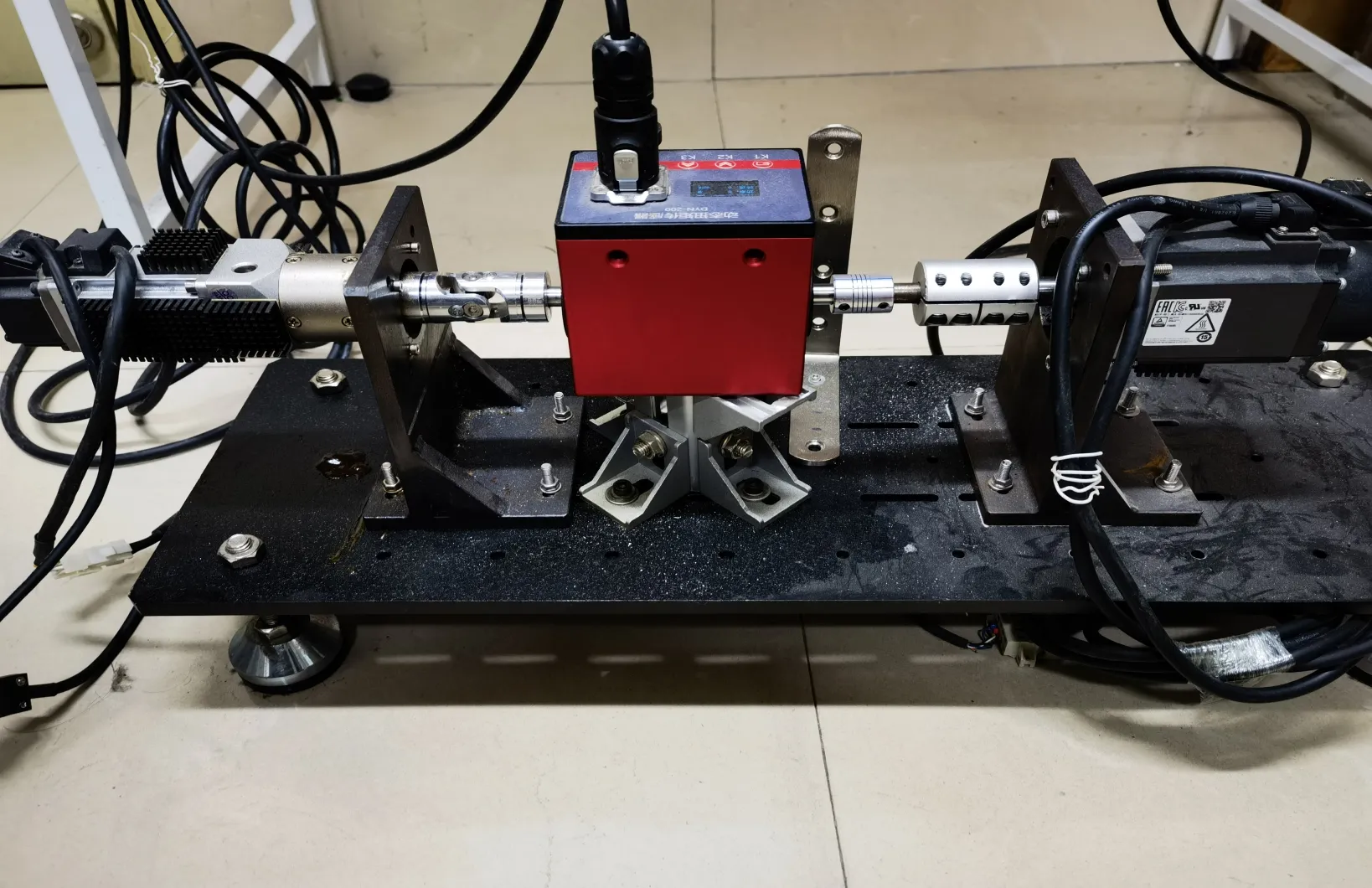
Fig.7 Loading test bench圖7 加載實驗平臺
3.2 實驗驗證
在倍福工控機上采用ST 語言實現(xiàn)控制算法,利用Twincat3 的scope 功能對輸出扭矩進行波形輸出,以驗證本文控制算法的性能。圖8—圖10 和圖11 分別是普通PID、模糊PID、迭代學(xué)習(xí)和改進迭代學(xué)習(xí)控制器輸出的扭矩曲線。

Fig.8 General PID control output curve圖8 普通PID控制輸出曲線
判斷一個加載系統(tǒng)好壞的評價指標主要由扭矩加載的幅值誤差和相位誤差兩部分組成。幅值誤差是指扭矩給定值和扭矩輸出值的誤差,本文采用峰值誤差來近似幅值誤差;相位誤差是指扭矩給定值的相位和扭矩輸出值的相位之間的誤差。從圖8 可以看出普通PID 加載的幅值誤差和相位誤差均較大,精度較低,達不到高精度的加載要求。圖9 的模糊PID 加載相比于普通PID 加載能夠有效縮小幅值誤差和相位誤差。由圖10 可以看出在經(jīng)過6 次迭代學(xué)習(xí)以后,加載的幅值誤差和相位誤差均遠遠小于模糊PID 加載。圖11 可以看出經(jīng)過3 次迭代學(xué)習(xí)以后,加載的幅值誤差和相位誤差更小。

Fig.9 Fuzzy PID control output curve圖9 模糊PID控制輸出曲線

Fig.10 Iterative learning control output curve圖10 迭代學(xué)習(xí)控制輸出曲線

Fig.11 Improved iterative learning control output curve圖11 改進迭代學(xué)習(xí)控制輸出曲線
表2 為4 種控制算法的性能比較結(jié)果。一般的工程誤差適用條件為5%,其中普通PID 加載的幅值誤差和相位誤差均超過了工程適用條件,分別為7.25%和6.06%。模糊PID 加載相較普通PID 加載有了很大改善,幅值誤差為2%,相位誤差為3.02%,已經(jīng)可以滿足一般的工程需要。迭代學(xué)習(xí)加載經(jīng)過6 次迭代后,幅值誤差為1%,相位誤差為1.28%。而模糊迭代學(xué)習(xí)加載經(jīng)過3 次迭代后,幅值誤差為0.5%,相位誤差為1.26%。

Table 2 Performance comparison of 4 control algorithms表2 4種控制算法的性能比較
根據(jù)實驗結(jié)果可以看出,ST 語言可以很好地對算法進行實現(xiàn)。通過實驗臺的加載,普通迭代學(xué)習(xí)控制器在第6次迭代才達到一個較好的輸出曲線,而本文設(shè)計的基于模糊控制的迭代學(xué)習(xí)控制器在第3 次迭代時已經(jīng)達到了一個較好的輸出曲線。通過與普通PID 和模糊PID 控制器對比得出結(jié)論,基于模糊控制的迭代學(xué)習(xí)加載跟蹤精度最高,在有限次迭代學(xué)習(xí)后能夠很好地跟蹤輸入曲線,具有跟蹤效果好的優(yōu)點,能夠很好地解決電動伺服加載系統(tǒng)加載的扭矩跟隨問題,并且基于模糊控制的迭代學(xué)習(xí)控制器還具有模糊控制自適應(yīng)的特點,能夠用更少的迭代次數(shù)更快地獲取所需要的跟隨扭矩曲線。
4 結(jié)語
本文以電動伺服加載系統(tǒng)控制出發(fā),選擇迭代學(xué)習(xí)控制器為優(yōu)化對象。迭代學(xué)習(xí)的優(yōu)點是跟蹤軌跡良好,并且不依賴控制系統(tǒng)的數(shù)學(xué)模型,能夠方便地實現(xiàn)算法,具有計算量小控制效果好的優(yōu)點,但是迭代學(xué)習(xí)的迭代次數(shù)一般較多,響應(yīng)較慢。迭代次數(shù)一般與學(xué)習(xí)律的取值有關(guān),所以針對迭代學(xué)習(xí)迭代時間慢的問題,本文設(shè)計了一種基于模糊控制的迭代學(xué)習(xí)控制器,能夠極大地減少迭代學(xué)習(xí)控制器的迭代次數(shù),取得了較好的扭矩跟隨效果,具有較高的工程實用價值。
本控制算法雖然不依賴數(shù)學(xué)模型,但是在一些基本參數(shù)上仍需要根據(jù)實際控制對象進行微調(diào)。未來研究將以自動尋找最優(yōu)參數(shù)為重點,嘗試自動根據(jù)反饋數(shù)據(jù)找到合適的學(xué)習(xí)律參數(shù),實現(xiàn)整個控制器的自動化設(shè)置。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
