工業機器人仿真工作站設計與應用
2024-02-03 08:52:24鄭直
信息記錄材料 2024年1期
關鍵詞:設計
鄭 直
(上海信息技術學校 上海 200000)
0 引言
在工業控制系統設計過程中,工業機器人在現代制造業中扮演著越來越重要的角色,其高效、精準和可靠的自動化特性為生產線帶來了巨大的改進。 然而,在實際部署機器人之前,進行仿真和驗證是至關重要的步驟[1]。 工業機器人仿真工作站提供了一個虛擬環境,可以模擬機器人的運動、任務執行和與周圍設備的交互,以評估和優化機器人系統的性能。 人們對機器人進行編程通常有兩種方式:命令式編程和機器學習。 命令式編程是一種通過編寫明確的指令和算法來控制機器人行為的方法,而機器學習是一種讓機器人通過數據和樣本自主學習并改進其行為的方法[2]。
為完成工業機器人物料搬運的仿真工作站設計,本文利用第三方建模軟件Solidworks 制作工業機器人的末端執行機構,如工具、夾具及周邊設備的模型,來豐富工業機器人本體生產廠商提供的離線編程和仿真軟件中的模型庫資源,完善離線編程模塊。 通過創建機器人工作站,導入三維模型,調整各個模型位置,進行工作站布局,并設計smart 組件,進行工業機器人離線編程,完成軌跡路線示教、搬運等過程的仿真,旨在借助虛擬仿真運行軟件直觀地觀察物料搬運系統運行效果,修改配置相關參數,有效地指導現場生產,縮短系統設計周期、提升編程效率,在一定程度上滿足柔性制造的要求,具有較大的生產實踐應用意義[3]。
1 搬運工作站
工業機器人物料搬運工作站是指在工業生產環境中,使用機器人來執行物料搬運任務的特定工作站。 工業機器人是自動化設備,具有多軸控制系統和可編程功能,它們能夠根據預先設定的程序和算法,在指定的工作區域內進行物料搬運操作。 并且工業機器人搬運工作站的控制系統負責編程和控制機器人的運動,通過控制系統,操作員可以設定機器人的路徑、速度和動作序列,以及處理機器人與其他設備的通信和協調[4]。
搬運工作站任務是由工業機器人將圖1 中的上料架中的工件搬運到下料架的工件位置。 任務選用ABB IRB1410 工業機器人,其最大載荷為5 kg,最大臂展為1.44 m。 IRB1410 性能卓越,其結構堅固可靠,噪聲低,使用壽命長。 被廣泛應用于弧焊、物料搬運、碼垛等工程領域。

圖1 搬運場景示意圖
通過仿真軟件創建一個完整的可仿真工作站,可以在實際投入生產之前評估和優化工作站設計、工藝流程和機器人任務,提高生產效率和安全性,并減少錯誤和成本[5]。運用仿真軟件可以用于創建和模擬工作站的虛擬環境的計算機程序。 這些軟件可以提供功能強大的仿真工具,模擬機器人、設備和工作站的行為,并進行運動規劃和碰撞檢測等操作。 在真實環境中有機器人,工具,工作臺,待搬運的物塊等,在RobotStudio 中需要的就是相應模型。
工業機器人本體模型從ABB 模型庫中直接添加。 機器人末端工具以及周邊設備模型,參考考證設備,使用SolidWorks 進行三維建模。 根據考核內容的多樣性,機器人末端執行機構為真空吸盤與抓手合并而成的工具,如圖2 所示。

圖2 工具三維模型
RobotStudio 支持多種格式的文件導入仿真環境中。在軟件界面菜單欄中【建模】下的【導入幾何體】中導入solidworks 中繪制的工作臺、搬運物塊、搬運工具以及外圍設備,調整各模型位置,搭建機器人搬運工作站。 如圖3所示。

圖3 機器人搬運工作站
2 創建工具數據與工件坐標
在對工業機器人進行仿真編程之前,需要在虛擬環境下,根據工作站的真實情況,構建相應的坐標環境,工業機器人的工件坐標和工具坐標系,通常會在編程前完成定義[6]。
企業生產現場,無論何種工業機器人應用,工業機器人的法蘭盤都會安裝相應的工具,使得工業機器人更好地工作。 當工業機器人安裝工具或夾具時,都需要對工業機器人安裝的工具進行傳輸控制協議(工具中心點)設定。 同時,為了使得工業機器人更好地工作,還要基于被操作對象創建工件坐標系。 那么,當工作站中的工件位置發生變化后,只需要更改工件坐標位置,所有路徑隨之更新。
在仿真軟件中,可以使用基本選項卡中的“其他—創建工件坐標/創建工具數據”,通過取點的方式,創建物塊搬運任務所需要的工具數據和工件坐標,如圖4所示。
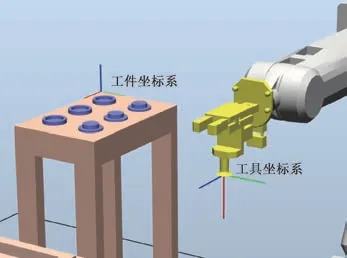
圖4 搬運工作站工具數據和工件坐標
3 設計Smart 組件
Smart 組件是RobotStudio 軟件實現虛擬仿真必不可少的功能,它是機器人輸入/輸出信號對仿真對象運動屬性控制的連接橋梁[7]。 機器人要在虛擬環境下實現真空吸盤對物料的吸取和放置效果,通常都會應用到Smart 組件,相比事件管理器,它的功能更為強大。 Smart 組件不僅可以高度逼真地模擬現場設備的輸入/輸出接口,還可以實現邏輯控制等功能。
在軟件中搭建好仿真工作站后,要實現吸盤工具對物料的吸放效果,就需要在建模選項卡中新增Smart 組件,給幾何體賦予仿真的效果。
首先在工具末端吸盤上,添加一個線傳感器,以此檢測機器人吸盤工具是否接觸到搬運物塊,然后通過“Attacher”安裝對象和“Detacher”拆除對象,實現工業機器人吸盤工具對物塊的吸取和放置動作效果。 數字信號之間的邏輯運算,則是通過“LogicGate”來實現。 工業機器人吸盤工具各子組件屬性連接關系如圖5 所示。
4 設定工作站邏輯
工作站的邏輯設定主要包含兩部分內容,首先是把Smart 組件的輸入/輸出信號與工業機器人端的輸出或輸入信號進行邏輯關聯,目的是將Smart 組件變成可以與工業機器人進行輸入/輸出通信的可編程控制器,實現后續的過程控制。
之后,是對Smart 組件與機器人端的信號通信進行設定,從而完成整個工作站的仿真動畫[8]。 在系統中設定名稱為do_Vac 的數字量輸出信號,作為控制吸盤打開和關閉的信號,使其與Smart 組件的中名稱為ditool 數字量輸入信號進行關聯。
5 工作站離線編程
5.1 物塊搬運流程設計
為了使工業機器人搬運工作站能夠按照給定的任務開展工作,需要對它進行機器人程序設計。 其主要程序包括工作站初始化程序、工作站搬運程序和主程序等。 為了提高編程效率,在仿真工作站中進行離線編程,先進行物塊搬運流程設計,如圖6 所示。
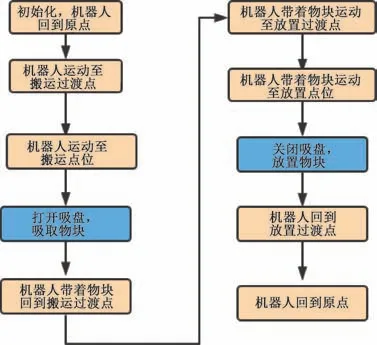
圖6 搬運流程圖
5.2 工作站程序設計
基于搬運流程,編制搬運程序,代碼如下所示:
MoveAbsJ Home\NoEOffs, v1000, z50, tool_xipan; !機器人回到原點
MoveJ Offs(P1,0,0,50), v1000, z50, tool_xipan; !機器人運行至搬運過渡點
MoveL Offs(P1,0,0,0), v1000, fine, tool_xipan; !機器人運行至搬運點位
Set do_Vac; ! 打開吸盤,吸取物塊
WaitTime 0.5; ! 延時等待
MoveL Offs(P1,0,0,50), v1000, z50, tool_xipan; !機器人帶著物塊垂直提升
MoveJ Offs(P2,0,0,50), v1000, z50, tool_xipan; !機器人運行至放置過渡點
MoveL Offs(P2,0,0,0), v1000, fine, tool_xipan; !機器人運行至放置點位
Reset do_Vac; ! 關閉吸盤,放置物塊
WaitTime 0.5; ! 延時等待
MoveL Offs(P2,0,0,50), v1000, z50, tool_xipan; !機器人回到放置過渡點
MoveAbsJ Home\NoEOffs, v1000, fine, tool_xipan; !機器人回到原點
5.3 工作站仿真運行
通常情況下,編程完成之后,要運行機器人程序,使機器人在虛擬環境下仿真運行,驗證程序是否正確合理。 如果工作流程基本實現,還要對機器人的運行軌跡進行分析,以確保機器人運行軌跡與實際工況一致,不會與周邊設備發生干涉,產生危險。
可通過TCP(工具中心點)跟蹤功能將工業機器人的實際運行軌跡記錄下來進行分析,提取工具中心點在當前工件坐標系Wobj 中的實時速度和坐標位置,如圖7所示。 最終優化調試完成的程序,可以使用U 盤或者網線,導至真實設備,結合現場實際情況調試運行。
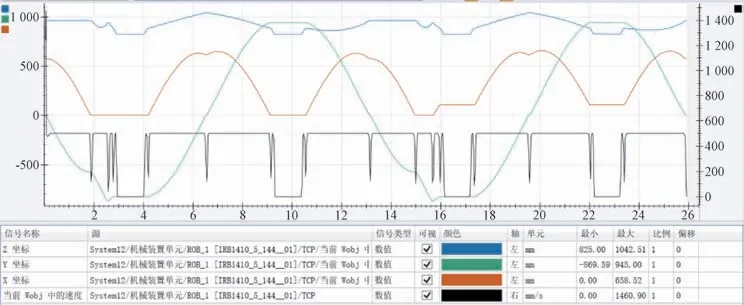
圖7 仿真運行測試結果
6 結語
本文使用SolidWorks 三維建模軟件和RobotStudio 離線編程軟件,結合實際應用,設計了工業機器人物塊搬運仿真工作站,并完成了機器人工作站整體布局,工具數據和工件數據設定,工作站Smart 組件設計,工作站邏輯設定,以及搬運流程設計、路徑規劃、程序設計和仿真運行。
該工作站還可以根據實際應用要求增加涂膠板、裝配臺等外圍設備,完成工業產品涂膠和電子產品裝配等操作,為開拓工業機器人的應用場景、實現生產線的柔性設計、縮短系統設計周期和降低生產成本提供更多的實驗數據和實踐依據。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
