基于灰狼算法改進(jìn)隨機(jī)森林算法的爆破振動速度預(yù)測研究
2024-01-27 01:52:50胡學(xué)敏宋良靈
黃金 2024年1期
胡學(xué)敏,曾 晟,宋良靈
(1.南華大學(xué)資源環(huán)境與安全工程學(xué)院; 2.湖南有色金屬職業(yè)技術(shù)學(xué)院資源環(huán)境系; 3.南華大學(xué)土木工程學(xué)院)
引 言
爆破開采方式因其所帶來的經(jīng)濟(jì)性和高效性,而被廣泛地應(yīng)用于露天礦山開采。而爆破作業(yè)產(chǎn)生的能量大部分會轉(zhuǎn)化為爆破應(yīng)力波,通過巖石等介質(zhì)向更遠(yuǎn)處傳播,對鄰近建筑物造成不利影響[1],其影響程度一般用質(zhì)點(diǎn)振動速度來描述。因此,如何精確地預(yù)測爆破振動速度對露天礦山的安全開采具有重要的工程意義。
早期爆破振動速度預(yù)測一般采用薩道夫斯基、P.B.Attewell及J.R.Devine等經(jīng)驗(yàn)公式,但這些經(jīng)驗(yàn)公式都很難準(zhǔn)確反映振動速度與爆破參數(shù)之間的非線性關(guān)系,且預(yù)測精度較低[2]。而人工智能算法能夠很好地處理這種非線性關(guān)系[3-4],因此人工智能算法預(yù)測爆破振動速度得到廣泛應(yīng)用,隨之單一人工智能算法,如BP神經(jīng)網(wǎng)絡(luò)[5-6]、支持向量機(jī)[7]、相關(guān)向量機(jī)[8]、遺傳算法[9]、粒子群算法[10]等在爆破振動速度預(yù)測中得到應(yīng)用。但是,這些單一算法存在很多缺點(diǎn),如需要數(shù)量大且連續(xù)的樣本、迭代次數(shù)較多、收斂速度較慢、運(yùn)算速度較慢和準(zhǔn)確性較低等。隨著研究的深入,學(xué)者們提出組合算法來改善單一算法的不足。例如:范勇等[11]使用粒子群和神經(jīng)網(wǎng)絡(luò)組合對露天礦爆破振動速度進(jìn)行研究分析,提出了PSO-BP的爆破振動速度峰值預(yù)測模型;何理等[12]使用粒子群和支持向量機(jī)組合對爆破振動進(jìn)行預(yù)測;岳中文等[13]提出了基于PCA-GA-SVM的露天礦爆破振動速度預(yù)測模型;郭欽鵬等[14]構(gòu)建了遺傳算法和BP神經(jīng)網(wǎng)絡(luò)的組合算法,并用于露天礦爆破振動速度預(yù)測;鄭皓文等[15]提出了基于ACOR-LSSVM算法的爆破振動速度預(yù)測模型。實(shí)踐證明,組合算法能夠提高爆破振動速度預(yù)測精度。
近年來,隨著灰狼算法、布谷鳥算法、鯨魚算法、螢火蟲算法、隨機(jī)森林算法、蟻群算法等仿生算法的出現(xiàn),以及這些算法在實(shí)踐工程研究中得到驗(yàn)證,也為爆破振動速度預(yù)測模型的改進(jìn)和預(yù)測精度的提高提供了新的思路。實(shí)踐表明:灰狼算法(Grey Wolf Optimizer,GWO)與其他仿生算法相比,具有搜索能力強(qiáng)、調(diào)節(jié)參數(shù)少、收斂能力較強(qiáng)等優(yōu)點(diǎn),隨機(jī)森林算法(Random Forest,RF)具有準(zhǔn)確率高、不容易出現(xiàn)過擬合、抗噪能力強(qiáng)、處理離散數(shù)據(jù)能力強(qiáng)等優(yōu)點(diǎn),通過結(jié)合2種算法各自的優(yōu)點(diǎn),提出了基于灰狼算法改進(jìn)的GWO-RF爆破振動速度預(yù)測模型(GWO-RF預(yù)測模型),并將其應(yīng)用至某露天開采礦山爆破工程實(shí)踐中,實(shí)踐證明該方法能很好地進(jìn)行露天礦爆破振動速度預(yù)測。
1 GWO-RF預(yù)測模型建立
1.1 基本算法
1)GWO算法。因灰狼捕獵速度快,圍獵動物能力較強(qiáng),種群內(nèi)有著嚴(yán)格的社會主導(dǎo)層級結(jié)構(gòu)等特點(diǎn),Mirjalili首次提出了新型群體仿生優(yōu)化算法[16],即灰狼算法(GWO)。該算法通過模仿狼群的四層階級制度來定義狩獵過程中的指揮命令優(yōu)先級,頭狼α>二級狼β>三級狼δ>普通狼ω。
灰狼群體的狩獵過程主要有3個階段:第一階段,通過偵察、追蹤和尋找獵物,并不斷靠近它;第二階段,在頭狼α的指揮下,從幾個方向騷擾獵物,使獵物的活動范圍逐漸減小,并形成包圍,直至獵物無法逃脫,等待被捕;第三階段,攻擊獵物,灰狼與獵物之間是不斷變化和尋找最優(yōu)解的過程,灰狼圍攻獵物的表達(dá)式見式(1),算法位置的更新圖見圖1。

圖1 灰狼位置更新圖Fig.1 Grey wolf position update diagram
(1)
式中:D為灰狼位置;XP(l)為狩獵位置向量;X(l)和X(l+1)均為XP(l)影響后的位置向量;l為迭代次數(shù);lmax為最大迭代次數(shù);A和C為變量系數(shù);a為收斂因子(取值從2線性減少到0);r1和r2為0~1的隨機(jī)參數(shù)。
狼群依次在頭狼α、二級狼β、三級狼δ的領(lǐng)導(dǎo)下不斷調(diào)整位置,并對被包圍的獵物進(jìn)行攻擊。在每一次的迭代中,得出的最佳值都會分配給α、β及δ,普通狼會根據(jù)前面狼的位置調(diào)整自身位置,數(shù)學(xué)表達(dá)式見式(2)~(4)。
(2)
(3)
X(l+1)=(X1+X2+X3)/3
(4)
式中:X1、X2和X3為狼群中其他狼受影響后的移動方向,由α、β、δ狼控制。
結(jié)合式(1)得到狼群的最終移動方向,并迭代更新狼群的位置。當(dāng)達(dá)到收斂時,狼群不再移動,狼的當(dāng)前位置就是最優(yōu)解。本文通過灰狼算法來尋找隨機(jī)森林算法中的2個超參數(shù):決策樹的棵數(shù)和決策樹的層數(shù)。這2個超參數(shù)的正確選擇可以提高隨機(jī)森林算法運(yùn)算的準(zhǔn)確性、速度等。
2)RF算法。隨機(jī)森林算法的原理是通過使用Bagging法來隨機(jī)有放回的抽取樣本,把數(shù)據(jù)集抽取出N個子集,每一個子集就是一棵決策樹,N棵決策樹集合在一起運(yùn)算叫作隨機(jī)森林算法。單棵樹使用不同參數(shù)進(jìn)行逐級分類,選擇好結(jié)點(diǎn)的參數(shù)是模型能否運(yùn)行成功的關(guān)鍵,采用的方法是計(jì)算每一個參數(shù)所能帶來的分類下降效果,常用C4.5算法來計(jì)算下降的效果,然后進(jìn)行逐級遞歸。每一棵決策樹都有一個結(jié)論,對N棵決策樹取平均值來最終確定結(jié)果。本文采用組合的隨機(jī)森林算法進(jìn)行預(yù)測研究。具體算法為:①在原始數(shù)據(jù)集中進(jìn)行N次Bagging法采樣,每一次都是有放回的采樣,得到了N棵決策樹;②在決策樹的算法中對每一個子集進(jìn)行計(jì)算,得出一個結(jié)果;③用群智能算法的原理,對所有結(jié)果取平均值得出最后結(jié)果。具體算法見圖2。

圖2 隨機(jī)森林算法流程圖Fig.2 Random Forest Algorithm flow chart
1.2 GWO-RF組合算法
GWO具有非常好的全局優(yōu)化能力和收斂能力。GWO-RF組合算法是采用GWO的優(yōu)點(diǎn)尋找RF中的決策樹的棵數(shù)和決策樹的層數(shù)2個超參數(shù),將其應(yīng)用到爆破質(zhì)點(diǎn)振動速度的預(yù)測中,具體的步驟(見圖3)如下:

圖3 GWO-RF組合算法預(yù)測流程圖Fig.3 GWO-RF combined algorithm prediction flow chart
1)數(shù)據(jù)的處理。輸入爆心距、微差時間、炮孔數(shù)、孔距、排距、孔深、總裝藥量及最大段藥量至RF算法中。
2)初始化。初始化狼群Pi,即隨機(jī)生成n個參數(shù),表達(dá)式見式(5)、式(6):

(5)
(6)
3)計(jì)算適應(yīng)度函數(shù)。為了確定狼群中每個個體的等級關(guān)系,有必要設(shè)置一個合理的適應(yīng)度函數(shù)來量化個體的適應(yīng)度,適應(yīng)度函數(shù)f(P)為:
f(P)=J(U,P)
(7)
式中:J(U,P)為目標(biāo)函數(shù)值,代表爆破振動預(yù)測的準(zhǔn)確性。
4)更新狼群的位置后,按照適應(yīng)度函數(shù)值排序,頭狼α、二級狼β及三級狼δ按照式(1)~(6)更新狼群的位置。
5)函數(shù)收斂。在每次迭代后,都需要檢查收斂的情況。如果已經(jīng)收斂,則進(jìn)入到下一步驟。否則,它將返回繼續(xù)迭代。當(dāng)狼群適應(yīng)度值的離散度較低時,GWO的全局搜索能力開始下降,算法趨于收斂。因此,本文使用狼群適應(yīng)度的方差作為標(biāo)準(zhǔn)。當(dāng)方差小于閾值,算法收斂。
6)訓(xùn)練模型。根據(jù)最終狼位置得出超參數(shù),然后設(shè)置RF模型參數(shù),并執(zhí)行RF算法以輸出預(yù)測結(jié)果。
2 工程應(yīng)用
2.1 GWO-RF預(yù)測模型預(yù)測
為檢驗(yàn)GWO-RF預(yù)測模型的實(shí)際效果,依據(jù)某露天礦山爆破工程監(jiān)測的69組爆破振動數(shù)據(jù)作為模型的檢驗(yàn)樣本,見表1。

表1 數(shù)據(jù)樣本Table 1 Data sample
首先對69組數(shù)據(jù)進(jìn)行歸一化處理,選取訓(xùn)練樣本62組數(shù)據(jù)輸入RF模型并設(shè)置GWO算法的參數(shù),如灰狼個數(shù)20、最大迭代20次,優(yōu)化2個變量,取最大值100,設(shè)置起始適應(yīng)度值為0.023 46,在第7次開始下降,適應(yīng)度值為0.022 98,第10次收斂值為0.022 96,進(jìn)行收斂后得到2個變量的最優(yōu)值,GWO-RF組合算法收斂曲線見圖4。此時決策樹層數(shù)為6層,決策樹棵數(shù)為14棵,目標(biāo)函數(shù)值為0.012 4。
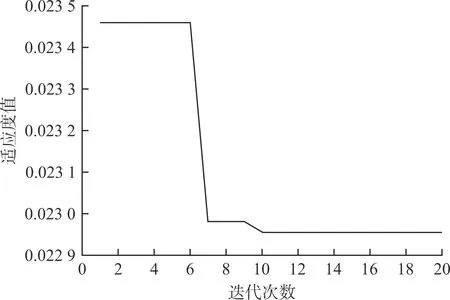
圖4 GWO-RF組合算法收斂曲線Fig.4 GWO-RF combined algorithm convergence curve
2.2 預(yù)測結(jié)果
灰狼算法與隨機(jī)森林算法的組合解決了如何設(shè)置最優(yōu)參數(shù)的問題。當(dāng)進(jìn)行回歸時超參數(shù)設(shè)置不合理會出現(xiàn)過度擬合,所以先使用灰狼算法尋找出以下2個超參數(shù),然后將參數(shù)輸入到隨機(jī)森林模型中。經(jīng)計(jì)算,預(yù)測值與真實(shí)值的平均誤差為97.72 %,訓(xùn)練集與預(yù)測集的樣本平均誤差率為98.38 %,具體見圖5、圖6。

圖5 GWO-RF訓(xùn)練集與預(yù)測結(jié)果對比Fig.5 Comparison of GWO-RF train set and prediction results
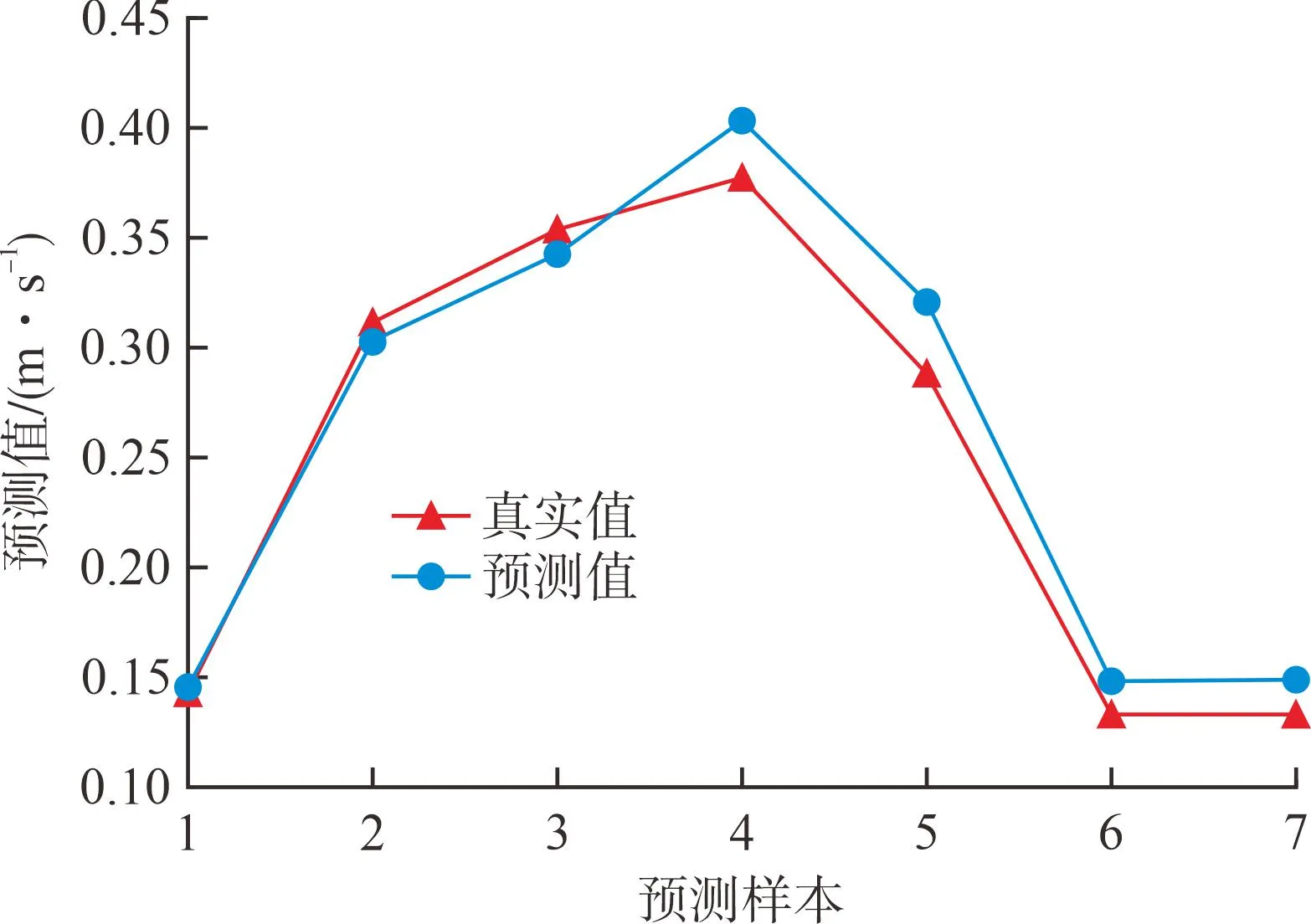
圖6 GWO-RF預(yù)測集與預(yù)測結(jié)果對比Fig.6 Comparison of GWO-RF test set and prediction results
2.3 不同預(yù)測模型結(jié)果對比
原始數(shù)據(jù)、RF、GWO-RF組合預(yù)測數(shù)據(jù)的對比見表2,RF算法、GWO-RF組合算法的預(yù)測曲線見圖7。由圖7可知:RF算法的預(yù)測精度較差,平均誤差率為59.89 %;GWO-RF組合算法誤差率比RF算法提高了37.83百分點(diǎn),這充分說明了使用GWO搜尋RF超參數(shù)比單一RF算法的預(yù)測精度高。

表2 預(yù)測結(jié)果與檢驗(yàn)樣本對比 m/sTable 2 Comparison of the prediction results and test samples

圖7 2種方法預(yù)測結(jié)果對比Fig.7 Comparison of the prediction results of 2 methods
3 結(jié) 論
1)通過灰狼算法對隨機(jī)森林算法的超參數(shù)進(jìn)行優(yōu)化,建立了GWO-RF爆破振動速度預(yù)測模型,為爆破振動速度預(yù)測提供了一種新途徑。
2)GWO-RF預(yù)測模型解決了薩道夫斯基只考慮爆心距、最大段藥量等參數(shù)的不足,還考慮了總裝藥量、微差時間、炮孔數(shù)、孔距、孔深及排距等6個參數(shù),使得預(yù)測模型更加符合工程實(shí)際。
3)實(shí)踐驗(yàn)證了GWO-RF預(yù)測模型對爆破振動質(zhì)點(diǎn)峰值速度預(yù)測的預(yù)測精度為97.72 %,說明該預(yù)測模型具有可行性和較高的準(zhǔn)確性,能夠應(yīng)用于爆破工程振動控制研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03