面向腸道平滑肌的微弱肌張力測試系統設計?
2024-01-26 06:59:34倪偉杰郭旭東
傳感技術學報 2023年12期
倪偉杰,郭旭東?,陳 杰
(1.上海理工大學健康科學與工程學院,上海 200093;2.上海交通大學醫學院附屬新華醫院小兒外科,上海 200092)
功能性胃腸病(Functional Gastrointestinal Disorder,FGIDs),作為一種因胃腸道功能紊亂引起的慢性或者是反復發作性的消化科常見疾病,由于FGIDs 的病因和發病機制尚未明確,因此目前治療功能性胃腸病的手段主要是改善飲食習慣以及心理輔助治療[1-2],這種治療方法經常出現時間不久后病情反復和直接作用時收效甚微等后果,治標不治本。真正要從根本治療功能性胃腸病,必須要明確它的發病機制。研究認為腸動力異常與腸道功能紊亂有著密切關系[3],腸動力異常最直觀表現在腸道器官平滑肌肌張力異常上,所以準確檢測人體腸道器官平滑肌肌張力,實時對比正常人腸道器官平滑肌肌張力與功能性胃腸病患者腸道器官平滑肌肌張力,能夠為闡明功能性胃腸病的內在機理提供巨大幫助,可為臨床上改善患者的預后、實現精準醫療目標提供依據。
市場上的肌張力測試系統根據測試對象的不同,可以分為運動肌張力測試系統和靜息肌張力測試系統。
運動肌張力測試系統的主要測量目標是人體骨骼肌肌肉肌張力突變時產生的生理信號,當肌肉收縮(抽搐、痙攣)時,肌肉的形狀隨之改變,導致皮膚表層的起伏,這種起伏直接作用在壓力傳感器上,根據壓力傳感器輸出信號的大小,可以直觀地觀察肌張力的大小[4]。運動肌張力測試系統只能測量運動過程中肌張力的大小,當肌肉處于靜止狀態時,肌張力大小就無法被測量到,并且運動肌張力測試系統往往需要依附在人體表面進行測量,顯然不適用于人體腸道器官平滑肌肌張力的測量。
靜息肌張力測試系統的主要測量目標是人體內器官肌條肌張力的大小,在測量肌條肌張力大小時,需要先將肌條靜置15 min,利用肌條自主收縮產生的拉力進行測量。因為肌條所產生的肌張力不比骨骼肌,所以靜息肌張力測試系統不像運動肌張力測試系統一樣可以采用直接測量的方式,需要將肌條肌張力進行放大后才能進行測量,又因為肌條本身尺寸很小,如何有效固定肌條,保證每次測量時肌張力的方向一致,也是靜息肌張力測試系統需要克服的難題之一。綜上所述,與運動肌張力測試系統相比,靜息肌張力測試系統的量程更小、精度更高、測試環境更苛刻,也更適合用來測量人體腸道器官平滑肌肌張力。
為了研究腸動力異常導致的功能性胃腸病的發病機制,需要以平滑肌肌條自發收縮運動的肌肉張力變化為測量指標,現有的測試系統均采用離線測量方式[5-6]。然而,臨床的肌張力測試設備主要用于運動肌張力的無創實時測量,通過對肌張力測量數據特征參數的提取,實現患者肌張力異常程度的評價,為康復訓練效果的量化評估提供參考依據。但尚無專用于平滑肌張力測試和電生理測試的靜息肌張力測試儀器,現有的通用生物信號記錄儀,傳感器的測量量程、靈敏度、分辨率、精度難以與被測的平滑肌的肌張力參數完全匹配。因此,需要設計針對腸道平滑肌的高精度肌張力測試系統,一方面在腸動力異常發病機制研究中,采用模型小鼠獲取離體全部結腸,進行離體腸動力檢測,分析各種藥物或者不同干預對平滑肌自發性收縮的影響,獲得生理和病理狀態下的腸道功能變化,驗證平滑肌肌張力異常與腸道功能紊亂的必然聯系;另一方面,通過術中獲取人體腸道平滑肌的標本,進行離體腸動力檢測。為了提高現有測試系統的測量精度,基于多級杠桿放大原理和差分式霍爾傳感原理開發了微弱肌張力測試系統。
1 系統總體設計
系統選用微處理器進行控制,并選擇自適應肌條夾持裝置固定肌條,防止平滑肌肌條的抖動和偏移影響最終測量結果。因為平滑肌肌張力大小只有mN 級別,測量電路回路內噪聲會對測量裝置的輸出信號產生嚴重干擾,需要有肌張力放大裝置放大肌張力再進行測量,在對各方案進行權衡后,選擇多級杠桿的結構實現力的放大,同時杠桿支點處選用柔性鉸鏈的形式傳遞壓力,使得裝置一體化程度提高,簡化裝置結構。在UG 軟件中建立杠桿模型并施加壓力載荷進行有限元分析,計算出杠桿放大倍數。利用霍爾式力傳感器來測量經多級杠桿放大后的力,通過特殊的轉換元件,通過霍爾元件測量磁場強度的方式來測量力的大小。信號處理模塊由多級電路組成,目的是去除高頻噪聲信號、50 Hz 工頻干擾信號、放大有效電壓信號,保證測試系統輸出穩定。系統總設計圖如圖1 所示。

圖1 系統總體結構框圖
2 系統主要模塊設計
2.1 肌張力放大裝置設計
2.1.1 多級杠桿結構設計
將多個單級杠桿串聯,形成更大的力放大倍數,整體杠桿的放大倍數是各子杠桿放大倍數的乘積,根據多級杠桿放大原理與平行杠桿疊加原理[7],可以設計出帶有較大放大倍數且穩定的杠桿結構,如圖2 所示。
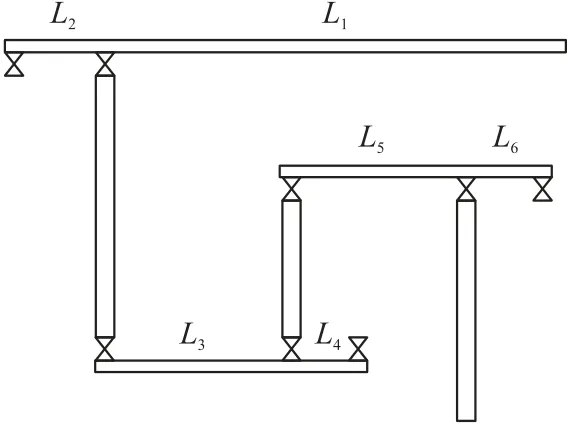
圖2 多級杠桿結構設計
多級杠桿放大倍數k為:
式中:L1,L3,L5分別為杠桿的長臂端,表示被放大力的一端,L2,L4,L6分別為杠桿的短臂端,表示輸出的一端。杠桿間通過柔性結構連接,實現力的傳遞及放大功能。L1=90 mm,L2=10 mm,L3=50 mm,L4=10 mm,L5=20 mm,L6=10 mm,代入到式(1)計算,理論上杠桿系統的放大倍數可以達到180 倍。
2.1.2 柔性鉸鏈設計
柔性鉸鏈是一種一體化結構鉸鏈,也經過一體化加工方式來實現,由于結構一體化,柔性鉸鏈的體積非常小且與杠桿本身相連無需固定,已經在微傳動領域有著廣泛的運用。與傳統鉸鏈相同,柔性鉸鏈的作用在于傳遞力和運動,依靠構件間的幾何約束與構件之間的相對形式運動,在構件末端得到相對位移。即利用薄弱部分產生彈性形變,經過幾代工程師的研究,為了更高的精度和柔性,柔性鉸鏈鉆孔形狀最優為橢圓形[8]。橢圓形柔性鉸鏈平面結構如圖3 所示。
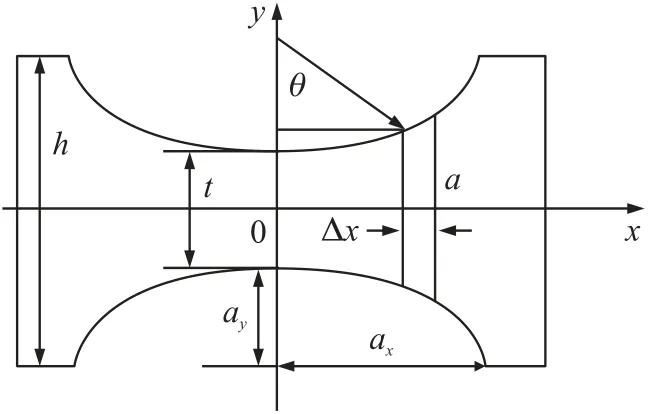
圖3 橢圓形柔性鉸鏈
橢圓形柔性鉸鏈轉動剛度J的計算公式如下:
式中:E為柔性鉸鏈材料彈性模量,b為柔性鉸鏈厚度,ay為橢圓形鉆孔縱軸長度,ax為橢圓形鉆孔橫軸長度,f3為轉動系數。
在本系統中,柔性鉸鏈設計為12 mm×4 mm×5 mm規模六面體,中心鉆孔最薄處設計為0.1 mm,及t=0.1 mm,b=5 mm,ay=1.95 mm。
2.2 基于霍爾效應的差分式力傳感器設計
基于霍爾效應的力傳感器具有響應速度快[9]、靈敏度高、體積小、集成度高等優點,為了實現mN級平滑肌肌張力的精密測量,在平滑肌肌張力經肌張力放大裝置放大后,擬采用基于霍爾效應的差分式力傳感器測量放大后的力。針對霍爾式力傳感器的輸出性質及工作原理,設計了相應的轉換方案和轉換元件。
2.2.1 轉換原理的設計
霍爾傳感器內霍爾元件的工作原理是檢測磁場的變化,如何將力的變化轉換為磁場的變化,是本次設計需要確定的關鍵技術之一。擬采用懸臂梁結構,即:將力的變化轉換為彈簧片形變,再轉換為磁場源與霍爾傳感器距離的變化,最后轉換為霍爾式力傳感器的磁感應強度的變化這一設計思路。
2.2.2 轉換元件的結構設計
對要素轉換實現方案的設計,將所要測得的力通過懸臂梁結構掛在彈簧片上,實現力的大小變化轉換為彈簧片的形變,將N45 釹鐵硼打造的尺寸為10 mm×2.5 mm×1.2 mm 的矩形永磁體固定在彈簧片上,彈簧片為厚度為0.6 mm 的鈹銅板,形成懸臂梁結構,實現彈簧片的形變轉換為霍爾元件與永磁體距離的變化,即霍爾元件感應到的磁感應強度的變化,輸出與磁感應強度成正比的電壓信號,根據元件各部位擺放需求,確定元件外部框架結構為U型[10],完成整個要素轉換流程,根據設計思路設計出的轉換元件結構如圖4 所示。
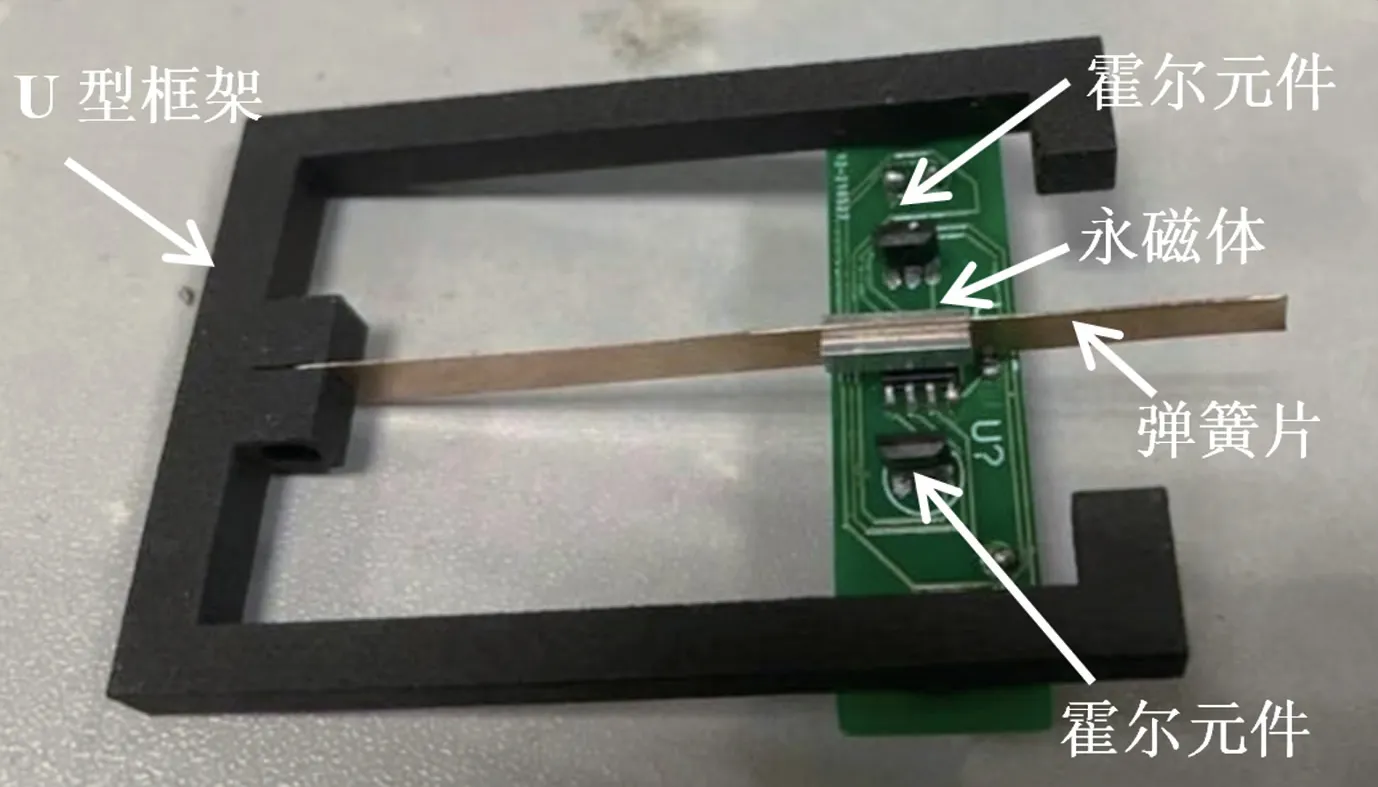
圖4 轉換元件結構圖
2.3 信號處理模塊設計
圍繞霍爾元件輸出的原始信號存在的問題,設計信號處理模塊,霍爾元件輸出電信號存在的兩大問題,分別是電路內部存在失調電壓以及輸出信號摻雜噪聲[11]。為了有效過濾出有效的霍爾元件輸出信號,一般采用正交電流調制電路解決失調電壓問題;用斬波濾波電路解決噪聲問題。
正交電流調制電路是利用電橋電路整流功能周期性改變輸入電流道路(改變電流相位),使得失調電壓正向反向疊加,從而起到消除失調電壓的效果[12]。失調電壓去除后,霍爾元件輸出偏平穩,但是信號的幅值仍處于毫伏級別,不便于后續的觀察和處理,所以在后級電路中設計一個儀表放大器,放大倍數為1 000。
設計斬波濾波電路的目的是去除電路輸出信號中的噪聲,按照信號處理的順序可以分為:①斬波電路將混合信號中的有效信號(霍爾元件輸出的理想信號是直流電平)調制到高頻段,再將高頻信號與噪聲信號疊加放大,經過解調階段將高頻段的有效信號轉化到低頻段,同時將噪聲信號轉化到高頻段,實現信號的分離。②濾波電路為高階低通濾波電路,目的是讓低頻的有效信號通過,濾去高頻的噪聲信號[13]。斬波電路可以有效地去除因傳感器制造工藝引起的閃爍噪聲,并且不增加電路繁瑣度,電路自身所攜帶的熱噪聲也得到了有效的控制。
3 系統實驗驗證和結果分析
3.1 杠桿建模及有限元分析
使用NX10.0 軟件對設計好的杠桿模型進行建模,柔性鉸鏈設置為5×4×12 mm 規模六面體,中心鉆孔最薄處設置為0.1 mm。保證輸出力有效傳遞的同時,杠桿另一端設計了一體化材料的配重塊,保證杠桿初始平衡,如圖5 所示。

圖5 杠桿建模模型
使用ANSYS 軟件對杠桿模型進行網格劃分,盡量保證選取硬度優秀的材料保證杠桿不易彎曲形變,提高杠桿工作性能,所以設定模型材料為鈦合金(Titanium_Alloy),載荷力以向下拉力載荷的形式實現,在杠桿端點處設置向下拉力代替實際模型砝碼產生的向下壓力。
模型的約束條件類型為固定約束,在柔性鉸鏈的一端設置固定約束模擬杠桿支撐點,將三個支撐點通過模型后方一根較粗的橫梁連接(固定約束1),既為后續測量提供方便,又保證了固定約束在實際操作過程中的穩定性。輸出力的測量方式以測量反作用力為準,在輸出端放置固定約束2,通過反作用力測量輸出力大小。具體固定約束放置如圖6 所示。
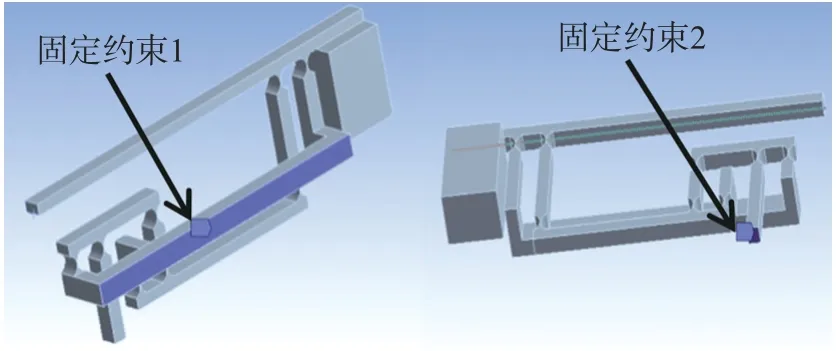
圖6 固定約束放置圖
完成以上各項參數設置后,將輸入載荷力設置為1 mN,可導出的輸出量為:載荷點力、結構最大應變、柔性鉸鏈應力、及輸出力大小,求解當前模型。當輸入載荷為1 mN,得到杠桿形變程度渲染圖如圖7 所示。
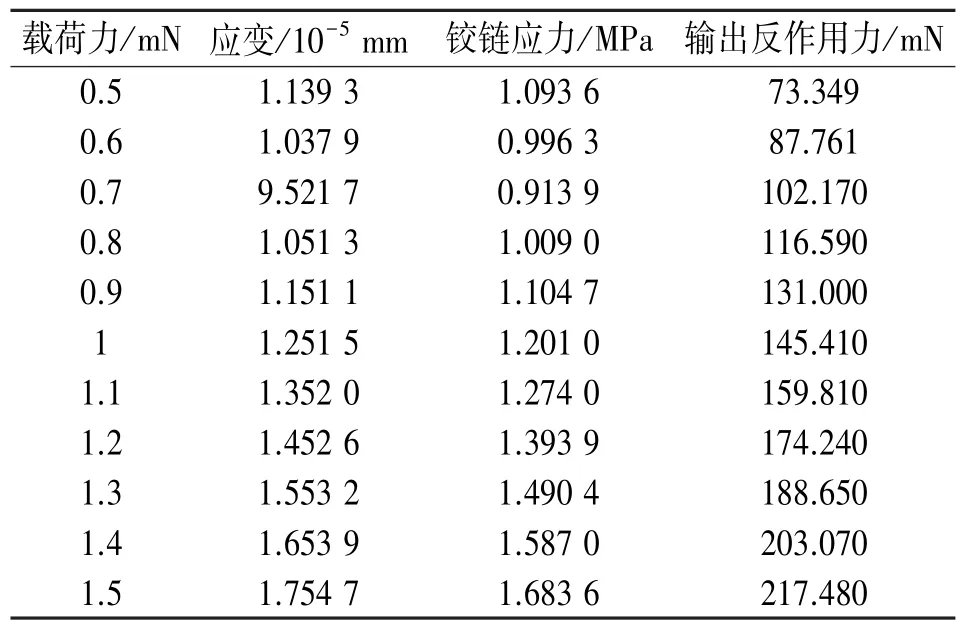
表1 多級杠桿輸入輸出的仿真結果
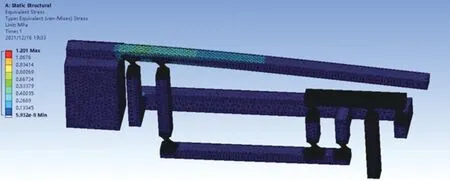
圖7 杠桿有限元分析渲染圖
根據有限元分析結果,當杠桿處于不受載荷力的初始情況下時,輸入端力為0 mN,載荷點壓力為0 MPa,柔性鉸鏈最大應力為1.598 6 MPa,輸出端力為1.78 mN。杠桿在初始狀態下的平衡情況良好;當輸入變化范圍為0.5 mN~1.5 mN、變化步長為0.1 mN 的載荷力時,導出輸出量:載荷點力、結構最大應變、柔性鉸鏈最大應力、及輸出端力大小,其中應變和柔性鉸鏈最大應力用來檢測杠桿和柔性鉸鏈的受力情況是否超過材料承受極限,載荷點壓力和輸出端力可以直觀觀察杠桿輸入輸出間的關系,在輸入端力不斷增大的過程中,載荷點壓力、結構最大應變、柔性鉸鏈最大應力及輸出端力大小都隨之增大,在輸入端力到達1.5 mN 時,應變量達到最大,為1.754 7 m,柔性鉸鏈最大應力達到最大,為1.683 6 MPa,均未超過鈦合金材料的承受極限。杠桿平均放大倍數為145,已實現肌張力的放大。
3.2 測試系統性能驗證及分析
為了驗證系統性能,選擇F1 等級標準砝碼產生0~0.15 gn標準力,選擇0~0.15 gn量程的張力換能器作為實驗對象,測試結果。如圖8 所示,橫坐標為砝碼重量(gn),縱坐標為信號處理電路后的張力換能器輸出信號(V),觀察整體的輸出曲線,如圖8 所示。
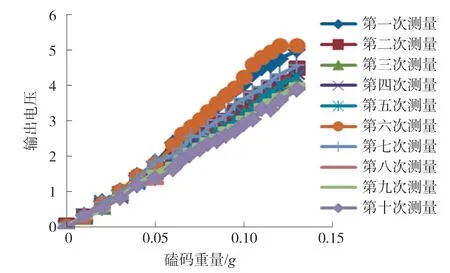
圖8 信號處理模塊輸出測量曲線
測試系統的工作曲線如圖9 所示。其性能參數如表2 所示。
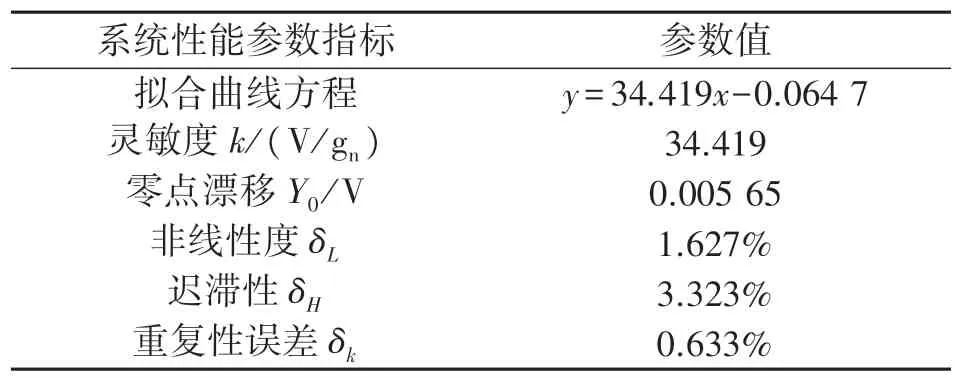
表2 測試系統性能參數
可以觀察到,經過信號處理模塊處理,測試系統的輸出具有零點漂移小、穩定性好、重復性高且靈敏度較好的特點。
4 小結
本文從胃腸道動力異常的特征信息出發,結合功能性性胃腸病的發病機制分析,設計了一種可用于測量平滑肌肌張力的測試系統,將腸道器官平滑肌肌張力大小轉換為電信號輸出,根據有限元分析結果給出肌張力放大裝置放大倍數,經過系統測試驗證給出測試系統性能參數表,驗證了該測試系統用于測量腸道器官平滑肌肌張力的可行性,該系統為微弱的平滑肌肌張力測量提供測量精度,為探究功能性胃腸病和腸動力異常的內在聯系提供了幫助。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
