無人機(jī)集群反制與對(duì)抗技術(shù)探討
2024-01-26 03:18:22王孟陽李智軍
指揮與控制學(xué)報(bào) 2023年6期
任 智 張 棟 唐 碩 王孟陽 李智軍
無人機(jī)集群作戰(zhàn)是網(wǎng)絡(luò)化智能化作戰(zhàn)的重要模式,能夠借助數(shù)量優(yōu)勢(shì)實(shí)現(xiàn)大范圍區(qū)域覆蓋的多源感知與任務(wù)執(zhí)行,在體系對(duì)抗中占據(jù)戰(zhàn)場優(yōu)勢(shì)[1].無人機(jī)集群系統(tǒng)在復(fù)雜多變的戰(zhàn)場環(huán)境中具有強(qiáng)大的戰(zhàn)場生存力、環(huán)境適應(yīng)力和快速響應(yīng)力.給現(xiàn)有的防空體系帶來極大的顛覆與挑戰(zhàn),出現(xiàn)“打得上的打不起”和“打得起的打不上”的對(duì)抗難題[2].因此,無人機(jī)集群系統(tǒng)反制與對(duì)抗是未來體系化作戰(zhàn)的研究重點(diǎn).
由于無人機(jī)集群系統(tǒng)成本低、規(guī)模大、機(jī)動(dòng)性能強(qiáng),傳統(tǒng)地面防御系統(tǒng)難以經(jīng)濟(jì)有效地應(yīng)對(duì)集群目標(biāo)威脅,常見的集群反制對(duì)抗措施主要通過物理攻擊或電子干擾等方法破壞集群系統(tǒng)網(wǎng)絡(luò)節(jié)點(diǎn)或通信鏈路.對(duì)此,中國電子技術(shù)標(biāo)準(zhǔn)化研究院2021 年發(fā)布的《智能無人機(jī)群系統(tǒng)發(fā)展白皮書》根據(jù)不同任務(wù)與應(yīng)用場景,對(duì)無人機(jī)集群系統(tǒng)的穩(wěn)定性、可靠性、安全性提出了不同層級(jí)的要求,以保證集群系統(tǒng)在有限通信與復(fù)雜環(huán)境下的作戰(zhàn)能力[3].由此可見,隨著復(fù)雜場景下集群控機(jī)技術(shù)的發(fā)展,“硬殺傷”與“軟殺傷”等方法對(duì)無人機(jī)集群的反制效果有限.因此,交戰(zhàn)雙方集群間的智能化與體系化對(duì)抗是未來集群反制與對(duì)抗的主要途徑與發(fā)展趨勢(shì).
集群對(duì)抗問題的研究最早在博弈論中的疆土防御[4-6]與追逃博弈[7-9]問題中展開,由于集群對(duì)抗博弈的局中人規(guī)模大導(dǎo)致求解困難,有學(xué)者通過目標(biāo)分配方法將集群對(duì)抗問題轉(zhuǎn)換為一對(duì)一或二對(duì)一的問題,進(jìn)而規(guī)劃集群個(gè)體的作戰(zhàn)任務(wù)與機(jī)動(dòng)軌跡[10-12].雖然基于目標(biāo)分配的集群對(duì)抗博弈模型簡化方法能夠在一定程度上降低模型求解的計(jì)算復(fù)雜度,但是并沒有考慮目標(biāo)分配后各子集智能體間的相互作用,不能夠體現(xiàn)大規(guī)模無人機(jī)集群協(xié)同作戰(zhàn)與集群智能的特點(diǎn).因此,也有學(xué)者從多智能體系統(tǒng)理論[13-14]與網(wǎng)絡(luò)動(dòng)力學(xué)[15-16]的角度出發(fā),為每個(gè)智能體設(shè)計(jì)獨(dú)立的個(gè)體行為與自組織決策規(guī)則,本文根據(jù)無人機(jī)集群對(duì)抗的典型場景、任務(wù)需求與作戰(zhàn)流程,從復(fù)雜群體行為演化控制、敵方集群統(tǒng)計(jì)特征識(shí)別推斷以及集群博弈對(duì)抗機(jī)理的角度出發(fā),探討無人機(jī)集群對(duì)抗的基本模型與關(guān)鍵技術(shù),分析了集群對(duì)抗問題研究的難點(diǎn)與挑戰(zhàn).
1 集群對(duì)抗問題與相關(guān)概念
在集群對(duì)抗過程中,無人機(jī)集群系統(tǒng)通過個(gè)體間相互作用的分布式自主決策涌現(xiàn)出復(fù)雜的集群行為與協(xié)同戰(zhàn)術(shù),根據(jù)戰(zhàn)場環(huán)境實(shí)時(shí)態(tài)勢(shì)、敵方集群策略與實(shí)際對(duì)抗任務(wù)需求,實(shí)現(xiàn)戰(zhàn)場快速響應(yīng)與集群作戰(zhàn)目標(biāo).對(duì)此,本文提出了涵蓋群體動(dòng)力學(xué)模型、對(duì)手建模問題和集群博弈對(duì)抗的集群對(duì)抗基本模型與體系框架,如圖1 所示.
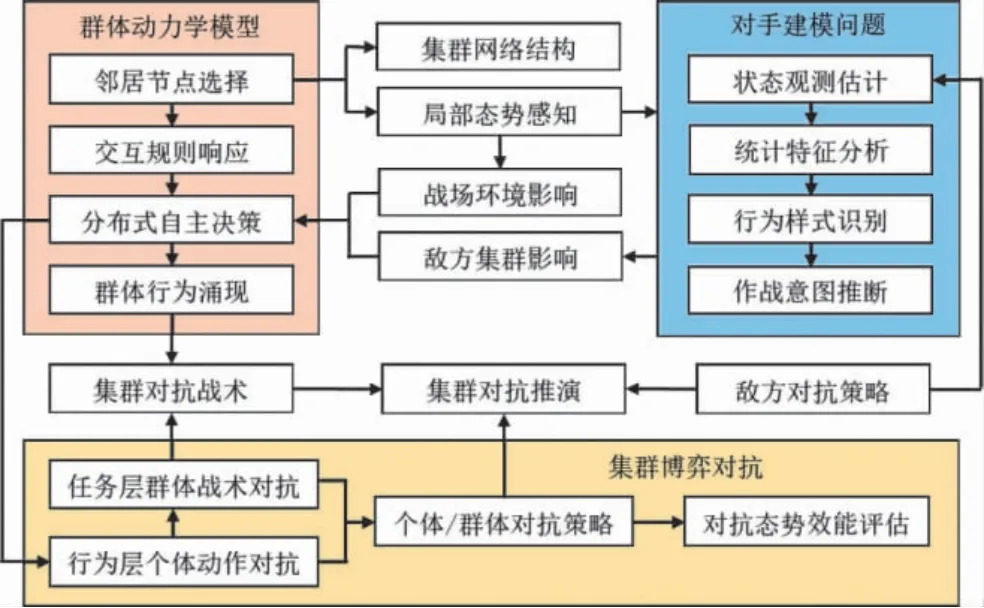
圖1 集群對(duì)抗體系框架Fig 1 Swarm confrontation system framework
其中,群體動(dòng)力學(xué)模型在確定集群網(wǎng)絡(luò)結(jié)構(gòu)與相互作用關(guān)系的基礎(chǔ)上,設(shè)計(jì)集群個(gè)體間交互規(guī)則響應(yīng)與分布式自主決策方法,分析集群智能行為的涌現(xiàn)過程與演化機(jī)理.然后進(jìn)一步考慮未知的敵方對(duì)抗策略進(jìn)行對(duì)手建模,根據(jù)局部態(tài)勢(shì)感知信息實(shí)現(xiàn)對(duì)敵方集群的狀態(tài)觀測估計(jì)與網(wǎng)絡(luò)結(jié)構(gòu)辨識(shí),推斷敵方集群采取的行為樣式與作戰(zhàn)意圖,進(jìn)而采取有針對(duì)性的對(duì)抗策略.最后,集群對(duì)抗博弈模型在群體動(dòng)力學(xué)模型與對(duì)手建模的基礎(chǔ)上考慮戰(zhàn)場環(huán)境與敵方集群行為的影響,根據(jù)集群對(duì)抗任務(wù)耦合的作戰(zhàn)效能指標(biāo),評(píng)估從個(gè)體自主決策到群體對(duì)抗策略的對(duì)抗效果.在此基礎(chǔ)上,進(jìn)一步優(yōu)化集群個(gè)體自組織規(guī)則與分布式自適應(yīng)決策,引導(dǎo)集群系統(tǒng)群體行為與集群智能的涌現(xiàn),提高集群對(duì)抗的響應(yīng)速度與決策效率.
結(jié)合集群對(duì)抗過程中無人機(jī)集群攜帶機(jī)載雷達(dá)、電子干擾設(shè)備與機(jī)載武器等有效載荷的特點(diǎn),構(gòu)想集群對(duì)抗典型作戰(zhàn)場景如圖2 所示.假設(shè)交戰(zhàn)雙方出動(dòng)大規(guī)模無人機(jī)集群進(jìn)攻敵方地面目標(biāo),同時(shí)在交戰(zhàn)對(duì)抗中對(duì)敵方集群目標(biāo)展開突防攔截.交戰(zhàn)雙方都需要在保證己方陣地安全的基礎(chǔ)上首先實(shí)現(xiàn)對(duì)敵方陣地的飽和打擊,其次盡可能地減少己方無人機(jī)的損毀并增加敵方有生力量的消耗.
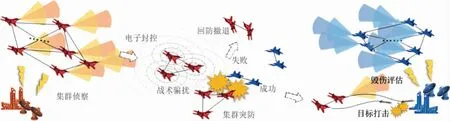
圖2 集群對(duì)抗典型作戰(zhàn)場景Fig 2 Typical battle scenario of swarm confrontation
在對(duì)抗的初始階段,作戰(zhàn)雙方通過地面指揮控制中心的預(yù)警雷達(dá)實(shí)現(xiàn)陣地區(qū)域覆蓋掃描,探測并預(yù)警敵方集群目標(biāo).由于地面預(yù)警雷達(dá)覆蓋面積大,掃描周期長,對(duì)敵方大規(guī)模集群目標(biāo)的預(yù)警信息時(shí)效差、精度低,僅能夠?yàn)槲曳郊禾峁┹^為粗略的戰(zhàn)場態(tài)勢(shì)信息.因此,無人機(jī)集群還需要結(jié)合作戰(zhàn)環(huán)境與己方拒止區(qū)域等掩護(hù),采取合適的編隊(duì)構(gòu)型與接敵策略執(zhí)行集群偵察任務(wù),鎖定跟蹤探測范圍內(nèi)的敵方目標(biāo),并通過集群內(nèi)個(gè)體間通信組網(wǎng)的信息交互,實(shí)現(xiàn)戰(zhàn)場多源態(tài)勢(shì)感知融合,獲得更為精確的戰(zhàn)場態(tài)勢(shì)信息.在此基礎(chǔ)上,無人機(jī)集群可根據(jù)實(shí)時(shí)作戰(zhàn)態(tài)勢(shì)選擇執(zhí)行電子封控任務(wù)或戰(zhàn)術(shù)騙擾任務(wù),為集群突防提供更有利的作戰(zhàn)優(yōu)勢(shì).隨著對(duì)抗雙方交戰(zhàn)進(jìn)程的推進(jìn),無人機(jī)集群結(jié)合對(duì)抗結(jié)果與實(shí)時(shí)態(tài)勢(shì),根據(jù)自主決策規(guī)則確定當(dāng)前的作戰(zhàn)任務(wù)與機(jī)動(dòng)策略.若集群突防成功,則可以考慮追擊敵方目標(biāo)并執(zhí)行既定打擊任務(wù);若集群突防失敗,則可以考慮執(zhí)行回防撤退任務(wù)四散逃逸并回防陣地.在對(duì)抗的結(jié)束階段,態(tài)勢(shì)占優(yōu)的一方通過集群對(duì)抗戰(zhàn)術(shù)完成了既定戰(zhàn)術(shù)任務(wù)目標(biāo),由存活的無人機(jī)集群對(duì)當(dāng)前戰(zhàn)場態(tài)勢(shì)進(jìn)行快速評(píng)估,并將實(shí)時(shí)態(tài)勢(shì)信息回傳給地面指揮控制中心,根據(jù)對(duì)抗評(píng)估結(jié)果決定下一周期的集群作戰(zhàn)任務(wù)目標(biāo).
2 集群對(duì)抗基本模型
2.1 群體動(dòng)力學(xué)演化與控制模型
在集群對(duì)抗過程中,如何描述個(gè)體到群體行為的演化關(guān)系與群體智能的涌現(xiàn)機(jī)理,是研究集群對(duì)抗問題建模的關(guān)鍵.集群系統(tǒng)個(gè)體在空間中的分布與群體行為建模的主要方法包括空間法和非空間法[17],如表1 所示.其中,空間法著眼于集群系統(tǒng)的空間分布規(guī)律,將集群系統(tǒng)視為連續(xù)整體,采用概率密度分布描述集群系統(tǒng)的運(yùn)動(dòng)與狀態(tài)變化[18];非空間法則從個(gè)體的運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)模型出發(fā),通過描述個(gè)體與環(huán)境或其他個(gè)體行為的相互作用,確定集群系統(tǒng)個(gè)體的運(yùn)動(dòng)狀態(tài)[19].由于實(shí)際宏觀集群系統(tǒng)中個(gè)體的運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)特征不可忽略,難以滿足空間法對(duì)群體的連續(xù)性假設(shè),因此,群體動(dòng)力學(xué)建模從個(gè)體運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)模型出發(fā),考慮集群個(gè)體間的相互作用與感知決策,描述集群系統(tǒng)在空間內(nèi)的運(yùn)動(dòng)狀態(tài)與內(nèi)部動(dòng)力學(xué)響應(yīng),對(duì)應(yīng)集群個(gè)體的行為響應(yīng)與決策流程如圖3 所示.
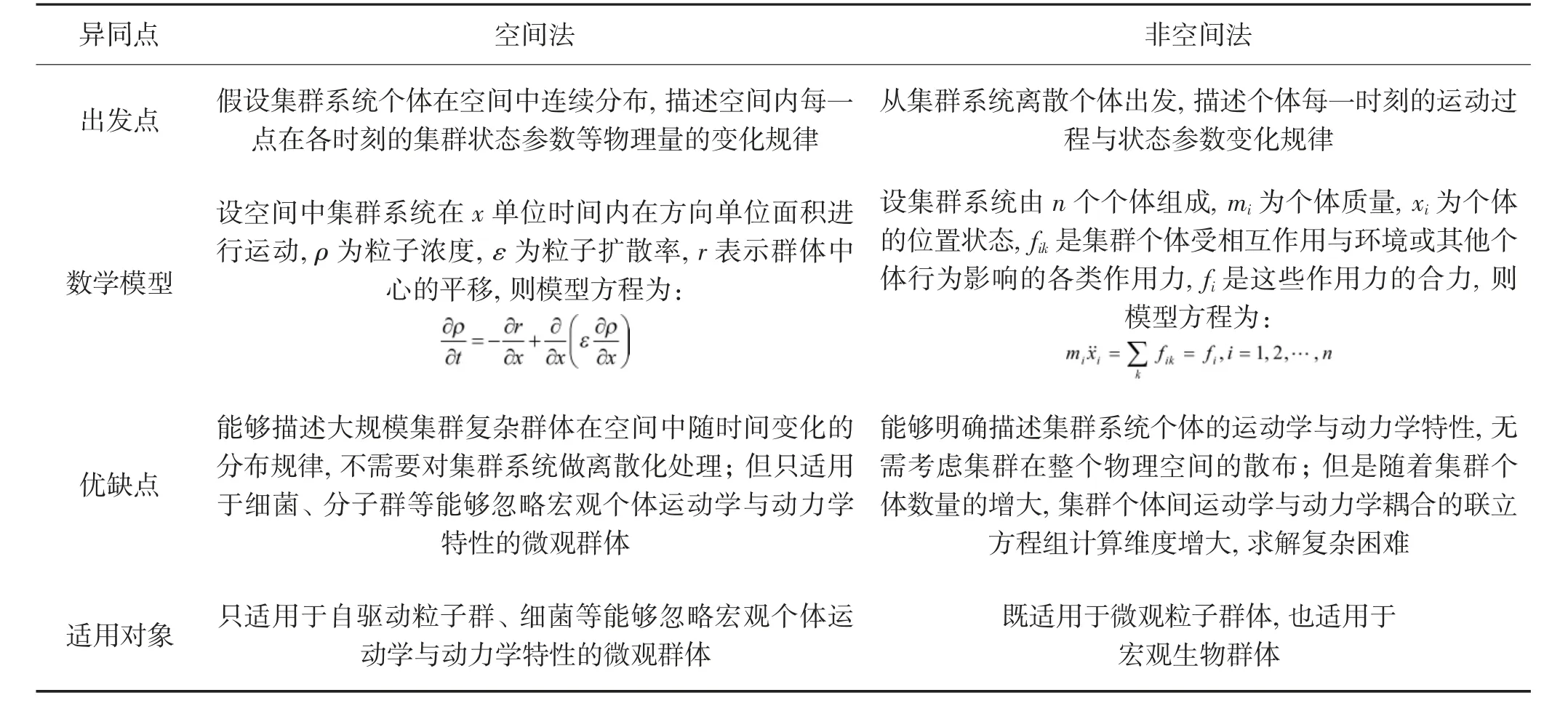
表1 群體動(dòng)力學(xué)建模空間法與非空間法的異同Table 1 Similarities and differences between spatial and non-spatial methods of group dynamics modeling

圖3 個(gè)體行為響應(yīng)與決策流程Fig 3 Individual behavior response and decision-making process
集群個(gè)體首先根據(jù)自身感知交互能力定位其他集群節(jié)點(diǎn),然后選取滿足個(gè)體通信約束與感知邊界的鄰居節(jié)點(diǎn)建立動(dòng)態(tài)連通的集群拓?fù)渚W(wǎng)絡(luò).在鄰居節(jié)點(diǎn)位置、速度等運(yùn)動(dòng)狀態(tài)的影響下,集群個(gè)體根據(jù)既定的自組織規(guī)則與控制協(xié)議確定各自的行為策略.在此基礎(chǔ)上,集群系統(tǒng)通過上述動(dòng)作狀態(tài)轉(zhuǎn)移與鄰居節(jié)點(diǎn)交互響應(yīng),實(shí)現(xiàn)對(duì)應(yīng)既定交互規(guī)則的復(fù)雜集群行為演化.集群系統(tǒng)的內(nèi)部響應(yīng)機(jī)理與復(fù)雜行為演化機(jī)制最早在生物集群研究中展開,通過分析魚群[20,21]、鳥群[22]與鴿群[23]等生物集群行為,研究不同生物集群中個(gè)體相互作用關(guān)系的建立與復(fù)雜集群網(wǎng)絡(luò)的形成,提出了不同生物集群的鄰居節(jié)點(diǎn)選擇方式與對(duì)應(yīng)集群網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu),如表2 所示.表中鄰居節(jié)點(diǎn)示意圖的紅色節(jié)點(diǎn)表示當(dāng)前節(jié)點(diǎn),藍(lán)色節(jié)點(diǎn)表示鄰居節(jié)點(diǎn),白色節(jié)點(diǎn)表示集群系統(tǒng)其他節(jié)點(diǎn),箭頭代表節(jié)點(diǎn)當(dāng)前速度方向,陰影部分代表了對(duì)應(yīng)鄰居節(jié)點(diǎn)選擇方法考慮的約束條件邊界.
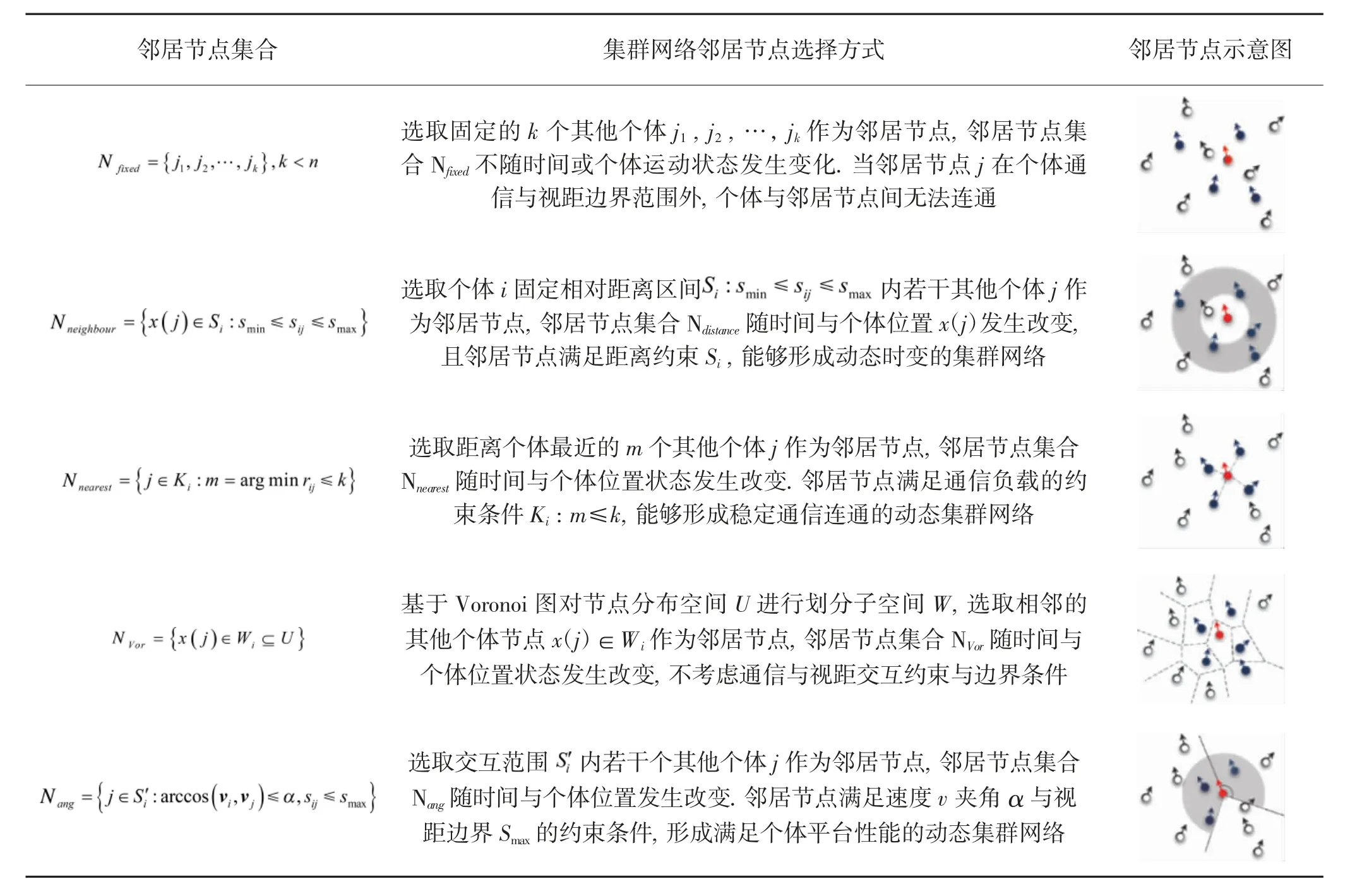
表2 集群網(wǎng)絡(luò)拓?fù)溥B通與鄰居節(jié)點(diǎn)選擇方式Table 2 Swarm network topology connection and neighbor node selection mode
實(shí)驗(yàn)物理學(xué)家從統(tǒng)計(jì)力學(xué)的角度出發(fā),進(jìn)一步總結(jié)了生物集群的自組織規(guī)則與相互作用規(guī)律.Reynolds 等首先提出了集中、防碰撞與速度匹配3個(gè)個(gè)體間相互作用規(guī)則,并據(jù)此建立Boid 模型模擬集群系統(tǒng)速度一致的聚集行為[24].在此基礎(chǔ)上,相關(guān)研究從多智能體系統(tǒng)、平均場理論、復(fù)雜網(wǎng)絡(luò)理論和最優(yōu)控制理論等角度出發(fā),通過設(shè)計(jì)集群系統(tǒng)中個(gè)體的簡單交互規(guī)則,確定集群系統(tǒng)的局部信息交互方式與個(gè)體間相互作用規(guī)則的行為響應(yīng)流程,分別提出了自驅(qū)動(dòng)粒子模型、異質(zhì)平均場模型、引力/斥力勢(shì)模型、一致性控制模型和最優(yōu)控制模型等各類不同的群體動(dòng)力學(xué)模型[25-30].在此基礎(chǔ)上,進(jìn)一步研究了模型中不同個(gè)體相互作用規(guī)則對(duì)集群系統(tǒng)動(dòng)態(tài)演化過程與復(fù)雜集群行為涌現(xiàn)結(jié)果的影響,然后通過相應(yīng)的集群控制方法實(shí)現(xiàn)集聚、渦旋與分簇等不同群體行為的自組織控制與自適應(yīng)切換[31].典型集群動(dòng)力學(xué)模型的對(duì)應(yīng)自組織規(guī)則與集群行為如表3 所示,集群動(dòng)力學(xué)模型的自組織規(guī)則描述了集群個(gè)體間的相互作用關(guān)系.在此基礎(chǔ)上,集群系統(tǒng)能夠通過根據(jù)既定自組織規(guī)則在宏觀層次上涌現(xiàn)出各類復(fù)雜的集群行為.對(duì)此,Olfati-Saber 等通過設(shè)計(jì)式(1)所示一致性協(xié)議與個(gè)體間相互作用的勢(shì)函數(shù)[29],實(shí)現(xiàn)集群系統(tǒng)集聚與跟蹤等復(fù)雜集群行為的自組織控制:
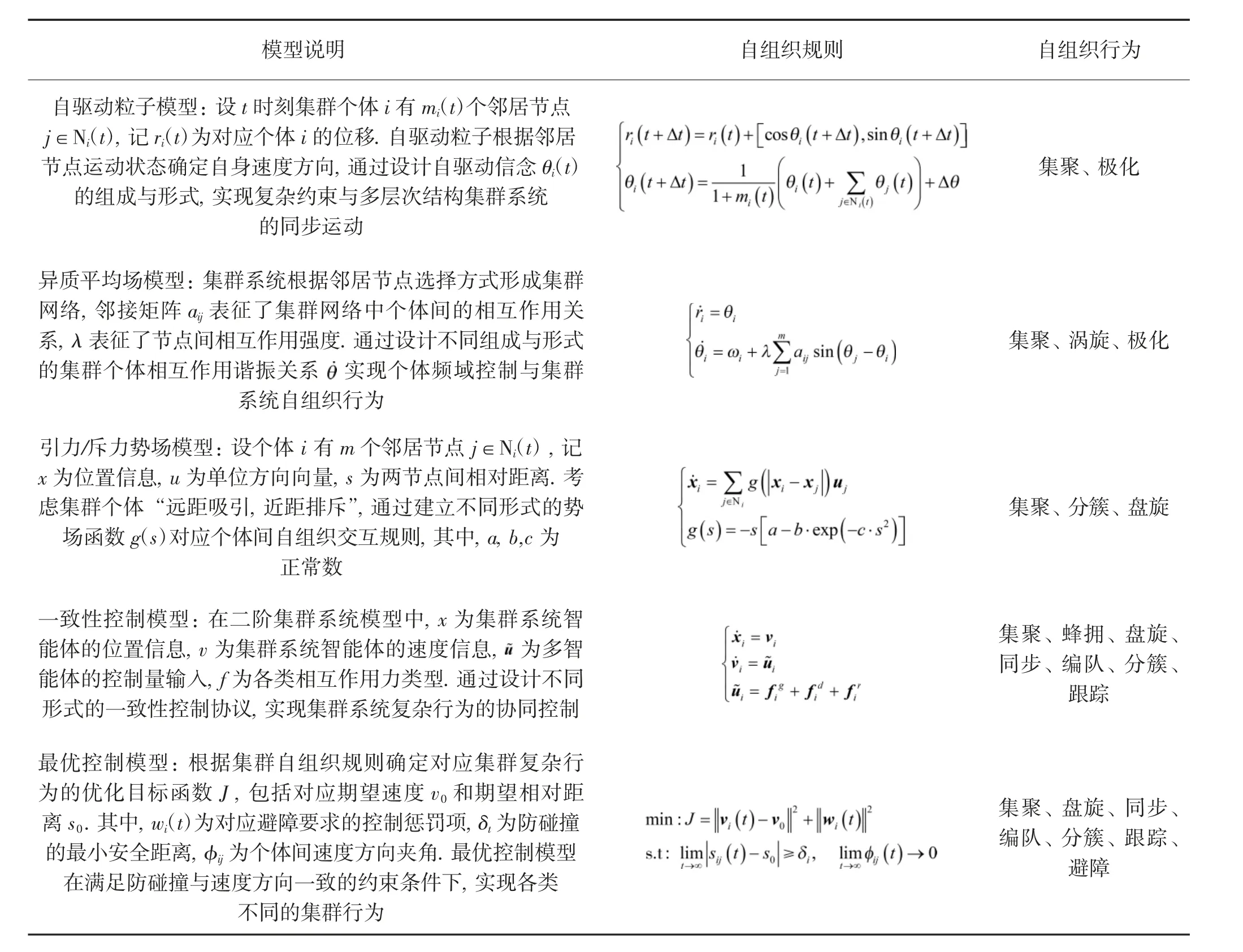
表3 集群動(dòng)力學(xué)模型自組織規(guī)則與集群行為Table 3 Self-organizing rules and swarm behavior of swarm dynamics model
式中,xi∈R3和vi∈R3表示集群系統(tǒng)個(gè)體位置和速度矢量;σ 為正則化梯度函數(shù);ε 為對(duì)應(yīng)正則化梯度函數(shù)參數(shù);aij為對(duì)應(yīng)鄰居節(jié)點(diǎn)相互作用強(qiáng)度;φα為對(duì)應(yīng)集群個(gè)體間鄰居節(jié)點(diǎn)相互作用的勢(shì)函數(shù).在上述模型與集群個(gè)體自組織相互作用規(guī)則中,通過設(shè)計(jì)正則化梯度函數(shù)σ 的對(duì)應(yīng)參數(shù)ε,可以實(shí)現(xiàn)集群系統(tǒng)集聚、渦旋、極化與分簇等復(fù)雜群體行為,進(jìn)而實(shí)現(xiàn)蜂擁、盤旋、編隊(duì)、跟蹤與避障等集群作戰(zhàn)任務(wù).
2.2 敵方集群統(tǒng)計(jì)特征模型
集群系統(tǒng)空間分布特征可以采用聚類方法對(duì)觀測的目標(biāo)位置信息進(jìn)行統(tǒng)計(jì)分析,通過對(duì)觀測集群目標(biāo)的子群分簇質(zhì)心與形狀的估計(jì)與擬合實(shí)現(xiàn)對(duì)集群目標(biāo)空間分布特征提取與分析[32].常見的聚類方法包括K-means 聚類方法與EM 聚類方法(expectation maximization,EM).其中,K-means 聚類方法根據(jù)集群個(gè)體間樣本距離將觀測集群目標(biāo)劃分為若干個(gè)子群,具有較高的計(jì)算效率,能夠?qū)崿F(xiàn)指定子群個(gè)數(shù)的快速聚類,但僅能夠確定集群整體的空間分布,無法確定對(duì)應(yīng)各分簇子群的形狀與質(zhì)心[33].而EM 聚類方法則采用期望最大化算法(expectation-maximization algorithm),通過期望(E 步)和最大化(M 步)兩個(gè)步驟的迭代更新,能夠?qū)崿F(xiàn)對(duì)觀測目標(biāo)集群子群的分布估計(jì)[34].假設(shè)集群空間分布由k 個(gè)高斯分布組成,對(duì)應(yīng)高斯混合分布函數(shù):
式中,xi為對(duì)應(yīng)集群狀態(tài)總體X 的m 個(gè)觀測樣本;ai為對(duì)應(yīng)第i 個(gè)高斯分布的混合系數(shù);為對(duì)應(yīng)高斯分布概率密度函數(shù);μi和σi為對(duì)應(yīng)第i 個(gè)高斯分布的均值向量與協(xié)方差矩陣.則對(duì)應(yīng)觀測目標(biāo)xj∈X從屬于第i 個(gè)高斯分布的后驗(yàn)概率為:
集群系統(tǒng)運(yùn)動(dòng)狀態(tài)的統(tǒng)計(jì)特征參數(shù)主要包括速度一致性序參量、群體角動(dòng)量和群體極化程度[35].其中,VISCEK 等首先定義了集群個(gè)體速度矢量的加權(quán)平均參數(shù)[25],用來描述集群中不同個(gè)體運(yùn)動(dòng)速度的一致性程度,如下式所示:
式中,va為速度一致性序參量;m 為觀測的集群目標(biāo)個(gè)體數(shù)目;vi為對(duì)應(yīng)個(gè)體i 的速度矢量,對(duì)應(yīng)集群系統(tǒng)個(gè)體運(yùn)動(dòng)狀態(tài)與速度波動(dòng)與群體的規(guī)模分布存在空間關(guān)聯(lián)關(guān)系如下式所示[36]:
群體極化程度和群體角動(dòng)量[21,27]針對(duì)集群系統(tǒng)中不同個(gè)體的運(yùn)動(dòng)狀態(tài)與速度方向特征,定義了集群個(gè)體運(yùn)動(dòng)速度方向的一致程度和集群整體運(yùn)動(dòng)速度方向的旋轉(zhuǎn)程度如下式所示:
式中,ui為對(duì)應(yīng)個(gè)體i 的單位速度矢量;ri為對(duì)應(yīng)個(gè)體i 指向集群質(zhì)心的矢徑;Op為群體極化程度,表征了集群中不同個(gè)體運(yùn)動(dòng)速度方向的一致性程度;Or為群體角動(dòng)量,表征了集群中不同個(gè)體繞集群質(zhì)心運(yùn)動(dòng)的旋轉(zhuǎn)程度.Op越大,則表征集群不同個(gè)體的速度方向一致性程度高;Or越大,則表征集群不同個(gè)體繞質(zhì)心的旋轉(zhuǎn)程度越大.
對(duì)此,結(jié)合生物集群的實(shí)驗(yàn)觀測統(tǒng)計(jì)數(shù)據(jù)信息,可以進(jìn)一步將集群系統(tǒng)涌現(xiàn)的集聚、渦旋與極化等復(fù)雜行為與群體狀態(tài)映射到集群系統(tǒng)運(yùn)動(dòng)狀態(tài)的序參數(shù)取值范圍,總結(jié)如下集群行為狀態(tài)的唯像規(guī)律[21].因此,通過分析群體極化程度與群體角動(dòng)量的統(tǒng)計(jì)特征與變化規(guī)律,能夠在識(shí)別目標(biāo)集群運(yùn)動(dòng)狀態(tài)的基礎(chǔ)上進(jìn)一步推斷目標(biāo)集群的行為樣式.在此基礎(chǔ)上,可以進(jìn)一步定義集群行為涌現(xiàn)的表達(dá)熵(expressive entropy)[37]來描述對(duì)應(yīng)各類統(tǒng)計(jì)特征參數(shù)識(shí)別與推斷集群行為樣式的不確定性,如下式所示:
式中,Sp為對(duì)應(yīng)集群系統(tǒng)的各類統(tǒng)計(jì)特征參數(shù);Hexp為表達(dá)熵,表征了通過各類統(tǒng)計(jì)特征參數(shù)分析集群行為涌現(xiàn)的不確定性;M(Sp)為對(duì)應(yīng)各類集群行為樣式b 的集合;p(b)為對(duì)應(yīng)各類統(tǒng)計(jì)特征參數(shù)識(shí)別與推斷集群行為樣式b 的概率.
2.3 集群對(duì)抗態(tài)勢(shì)效能模型
在無人機(jī)空戰(zhàn)對(duì)抗問題中,集群系統(tǒng)的空戰(zhàn)對(duì)抗態(tài)勢(shì)效能評(píng)估[38]涵蓋了戰(zhàn)場空間態(tài)勢(shì)、作戰(zhàn)任務(wù)能力和體系對(duì)抗效能.通過考慮集群網(wǎng)絡(luò)相鄰節(jié)點(diǎn)的協(xié)同效應(yīng)與集群系統(tǒng)協(xié)同作戰(zhàn)的空間態(tài)勢(shì),分析交戰(zhàn)雙方集群系統(tǒng)在攻擊占位或防御機(jī)動(dòng)等方面的作戰(zhàn)優(yōu)勢(shì),衡量交戰(zhàn)雙方采取方采取對(duì)抗戰(zhàn)術(shù)意圖的優(yōu)劣與威脅程度.
集群對(duì)抗的戰(zhàn)場空間態(tài)勢(shì)在一對(duì)一作戰(zhàn)態(tài)勢(shì)的基礎(chǔ)上考慮集群個(gè)體間的協(xié)同效應(yīng).一對(duì)一對(duì)抗的戰(zhàn)場空間態(tài)勢(shì)評(píng)估根據(jù)交戰(zhàn)雙方相對(duì)位置與速度方向,將對(duì)應(yīng)戰(zhàn)場空間分布的迎頭態(tài)勢(shì)和尾追態(tài)勢(shì)分為均勢(shì)、優(yōu)勢(shì)與劣勢(shì).通過結(jié)合自身任務(wù)作戰(zhàn)能力的機(jī)動(dòng)性能約束、偵察感知范圍和毀傷打擊邊界,基于專家經(jīng)驗(yàn)設(shè)計(jì)對(duì)應(yīng)個(gè)體i 與個(gè)體j 的角度態(tài)勢(shì)、距離態(tài)勢(shì)、高差態(tài)勢(shì)和速度態(tài)勢(shì)等態(tài)勢(shì)函數(shù)[39].集群個(gè)體各類戰(zhàn)場空間態(tài)勢(shì)函數(shù)的具體數(shù)學(xué)模型因?qū)<医?jīng)驗(yàn)相異而各不相同,常通過非線性函數(shù)的組合描述集群個(gè)體對(duì)抗態(tài)勢(shì)的空間分布規(guī)律與特征.在此基礎(chǔ)上,將集群對(duì)抗中每組個(gè)體間的戰(zhàn)場空間態(tài)勢(shì)以矩陣形式描述,如下式所示:
式中,Sk為對(duì)應(yīng)各類戰(zhàn)場空間態(tài)勢(shì)的態(tài)勢(shì)矩陣;sij為個(gè)體i 與個(gè)體j 間的相對(duì)態(tài)勢(shì).
在對(duì)抗過程中,集群系統(tǒng)首先根據(jù)當(dāng)前戰(zhàn)場空間分布與運(yùn)動(dòng)狀態(tài)將敵我雙方集群個(gè)體劃分為若干分簇子群社團(tuán),不同子群的個(gè)體在戰(zhàn)場中的空間態(tài)勢(shì)互不影響[40].假設(shè)同一子群中的個(gè)體僅能夠選取同一敵方子群中的個(gè)體作為對(duì)抗目標(biāo),對(duì)抗目標(biāo)相同的集群個(gè)體戰(zhàn)場空間態(tài)勢(shì)相互獨(dú)立且形成協(xié)同作戰(zhàn)態(tài)勢(shì)[41],則對(duì)應(yīng)集群個(gè)體的協(xié)同作戰(zhàn)態(tài)勢(shì)如下式所示:
式中,Rj為以敵方個(gè)體j 為對(duì)抗目標(biāo)的集群個(gè)體集合;Jsi為對(duì)應(yīng)個(gè)體i 考慮協(xié)同效應(yīng)的戰(zhàn)場空間態(tài)勢(shì),表征了具有相同對(duì)抗目標(biāo)的集群個(gè)體間存在協(xié)同效應(yīng),可以通過相互配合形成協(xié)同機(jī)動(dòng)策略,提升集群對(duì)抗整體戰(zhàn)場空間態(tài)勢(shì)與作戰(zhàn)效能.
此外,集群個(gè)體間確定的協(xié)同關(guān)系與目標(biāo)分配結(jié)果影響了集群系統(tǒng)整體的目標(biāo)殺傷率、裝備生存率和作戰(zhàn)效費(fèi)比等體系對(duì)抗效能.其中,目標(biāo)殺傷率和裝備生存率與集群個(gè)體雷達(dá)探測系統(tǒng)的預(yù)警概率和機(jī)載武器系統(tǒng)的毀傷概率有關(guān).在集群對(duì)抗過程中,集群系統(tǒng)個(gè)體對(duì)目標(biāo)的探測預(yù)警與毀傷打擊過程相互獨(dú)立,則以敵方集群個(gè)體j 為對(duì)抗目標(biāo)的我方集群個(gè)體i∈Rj協(xié)同打擊的毀傷概率為:
式中,pf,ij為集群i 個(gè)體雷達(dá)探測系統(tǒng)發(fā)現(xiàn)對(duì)抗目標(biāo)j的預(yù)警概率;pd,ij為集群個(gè)體i 機(jī)載武器系統(tǒng)對(duì)打擊目標(biāo)j 的毀傷概率.
根據(jù)集群個(gè)體通過協(xié)同配合對(duì)目標(biāo)的殺傷概率,定義集群在對(duì)抗過程中對(duì)敵方目標(biāo)總體殺傷概率與敵方目標(biāo)總體數(shù)量的比值為集群對(duì)抗的目標(biāo)殺傷率,如下式所示:
同理,定義集群系統(tǒng)在敵方攻擊下存活概率與集群個(gè)體總數(shù)量的比值為集群系統(tǒng)的裝備生存率,如下式所示:
式中,pd,ji為敵方集群個(gè)體j 機(jī)載武器系統(tǒng)對(duì)我方集群個(gè)體i 的毀傷概率.在此基礎(chǔ)上,進(jìn)一步定義集群系統(tǒng)對(duì)抗過程中對(duì)目標(biāo)殺傷率與己方集群個(gè)體在敵方攻擊下毀傷概率的比值為集群系統(tǒng)完成既定作戰(zhàn)任務(wù)的效費(fèi)比[42],如下式所示:
在集群對(duì)抗的戰(zhàn)場空間態(tài)勢(shì)與體系對(duì)抗效能的基礎(chǔ)上,進(jìn)一步考慮敵我雙方集群系統(tǒng)在機(jī)動(dòng)響應(yīng)、感知探測、毀傷打擊和電子對(duì)抗等方面的整體作戰(zhàn)能力優(yōu)勢(shì)與劣勢(shì).針對(duì)各類集群對(duì)抗態(tài)勢(shì)效能,采用加權(quán)方法確定對(duì)應(yīng)集群系統(tǒng)個(gè)體的綜合協(xié)同態(tài)勢(shì)函數(shù)如下式所示:
式中,Js為對(duì)應(yīng)集群系統(tǒng)角度態(tài)勢(shì)、距離態(tài)勢(shì)、高差態(tài)勢(shì)和速度態(tài)勢(shì)的戰(zhàn)場空間協(xié)同態(tài)勢(shì);Je為對(duì)應(yīng)集群系統(tǒng)機(jī)動(dòng)響應(yīng)、感知探測、毀傷打擊和電子對(duì)抗的整體協(xié)同作戰(zhàn)任務(wù)優(yōu)勢(shì);Jc為對(duì)應(yīng)集群系統(tǒng)體系對(duì)抗效能;ωs、ωe和ωc分別為對(duì)應(yīng)各類型態(tài)勢(shì)效能的加權(quán)系數(shù).
3 集群對(duì)抗關(guān)鍵技術(shù)
結(jié)合無人機(jī)集群對(duì)抗過程中感知、決策與控制的具體作戰(zhàn)流程,在集群對(duì)抗中敵方集群統(tǒng)計(jì)特征模型、集群對(duì)抗態(tài)勢(shì)效能模型和群體動(dòng)力學(xué)演化與控制模型的基礎(chǔ)上,從敵方集群建模、動(dòng)態(tài)博弈決策和集群協(xié)同控制的角度出發(fā),確定集群對(duì)抗關(guān)鍵技術(shù)包括基于多源態(tài)勢(shì)感知的對(duì)手建模方法、面向不完全信息動(dòng)態(tài)博弈的集群對(duì)抗決策方法和結(jié)合虛擬領(lǐng)導(dǎo)者的分布式集群牽制控制方法,具體內(nèi)容如圖4 所示.
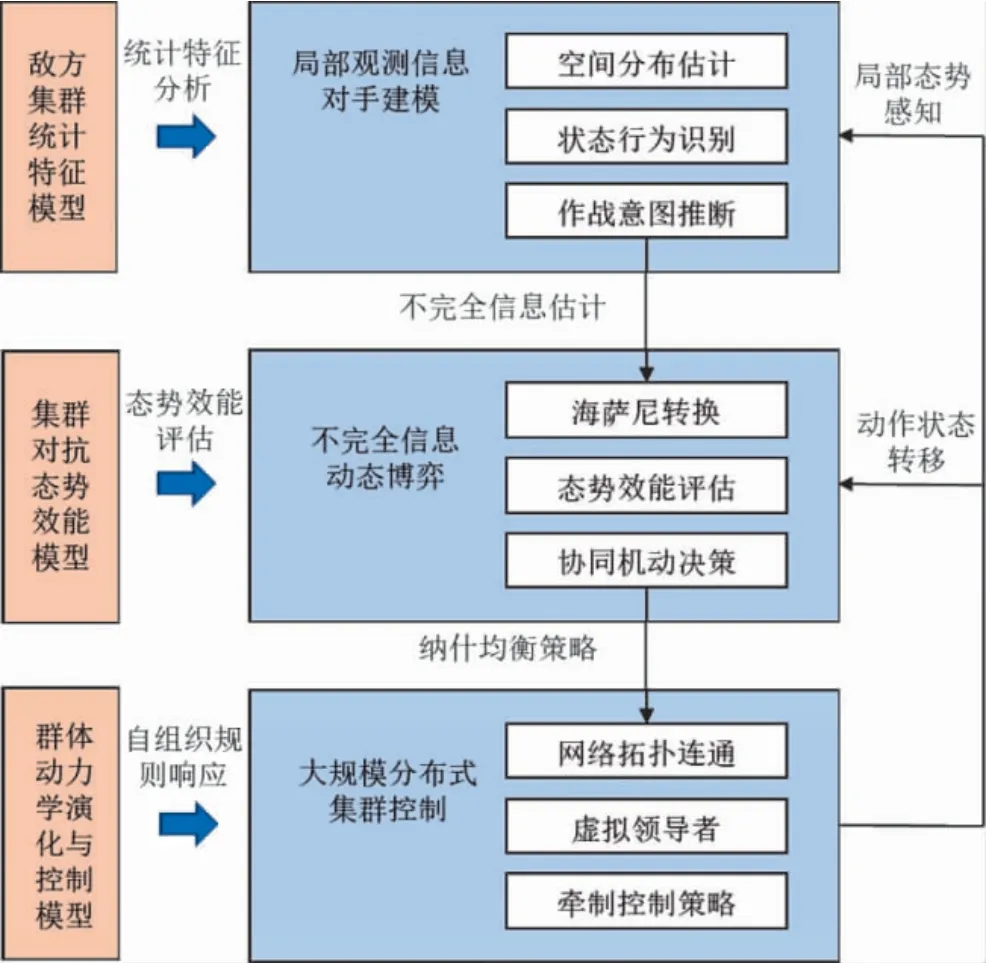
圖4 集群對(duì)抗基本模型與關(guān)鍵技術(shù)Fig 4 Basic model and key technology of swarm confrontation
3.1 結(jié)合虛擬領(lǐng)導(dǎo)者的集群牽制控制
在高動(dòng)態(tài)強(qiáng)對(duì)抗的復(fù)雜戰(zhàn)場環(huán)境中,面對(duì)突發(fā)敵方威脅時(shí)集群個(gè)體需要快速機(jī)動(dòng)響應(yīng)實(shí)現(xiàn)既定作戰(zhàn)任務(wù)的集群控制.牽制控制方法能夠根據(jù)集群系統(tǒng)的群體動(dòng)力學(xué)模型,通過對(duì)集群部分節(jié)點(diǎn)的控制實(shí)現(xiàn)在保證集群網(wǎng)絡(luò)最小功能單位持續(xù)連通的條件下集群系統(tǒng)作戰(zhàn)任務(wù)與群體行為的牽制控制[43].其中,關(guān)鍵牽制節(jié)點(diǎn)的選取根據(jù)對(duì)應(yīng)分簇子群網(wǎng)絡(luò)節(jié)點(diǎn)度量參數(shù)來確定,而虛擬領(lǐng)導(dǎo)者根據(jù)集群系統(tǒng)期望的空間分布與運(yùn)動(dòng)狀態(tài)來確定.在對(duì)應(yīng)博弈模型納什均衡解的基礎(chǔ)上,通過確定△T 時(shí)刻后集群系統(tǒng)最小功能單位的分簇子群,選取對(duì)應(yīng)分簇子群的群體質(zhì)心為虛擬領(lǐng)導(dǎo)者,虛擬領(lǐng)導(dǎo)者在當(dāng)前時(shí)刻的速度即為△T 時(shí)刻后對(duì)應(yīng)分簇子群精煉貝葉斯納什均衡策略的平均速度.設(shè)對(duì)應(yīng)第k 個(gè)分簇子群有nk個(gè)節(jié)點(diǎn),則對(duì)應(yīng)虛擬領(lǐng)導(dǎo)者k 的動(dòng)態(tài)方程如下式所示:
式中,xk和vk為集群分簇子群k 中虛擬領(lǐng)導(dǎo)者k 的位置矢量和速度矢量;為對(duì)應(yīng)集群對(duì)抗博弈模型中個(gè)體i 的精煉貝葉斯納什均衡策略;ui為對(duì)應(yīng)個(gè)體i 的單位速度方向矢量.
在此基礎(chǔ)上,集群系統(tǒng)通過虛擬領(lǐng)導(dǎo)者對(duì)關(guān)鍵節(jié)點(diǎn)的牽制引導(dǎo)與集群網(wǎng)絡(luò)相鄰節(jié)點(diǎn)間的相互作用影響,實(shí)現(xiàn)對(duì)應(yīng)集群系統(tǒng)群體行為與對(duì)抗戰(zhàn)術(shù)等期望目標(biāo)的牽制控制.對(duì)應(yīng)集群系統(tǒng)各節(jié)點(diǎn)的運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)模型如下式所示:
式中,xik和vik為集群分簇子群k=1,2,…,m 中集群個(gè)體i=1,2,…,ni的位置向量和速度向量;為對(duì)應(yīng)集群個(gè)體i 受同一分簇子群中鄰居節(jié)點(diǎn)個(gè)體j∈Ii影響的速度方向控制輸入;為對(duì)應(yīng)集群個(gè)體受虛擬領(lǐng)導(dǎo)者k 影響的控制輸入;α 為對(duì)應(yīng)集群個(gè)體是否為關(guān)鍵牽制節(jié)點(diǎn)的判斷標(biāo)識(shí),若α=1 則該個(gè)體為關(guān)鍵牽制節(jié)點(diǎn),在虛擬領(lǐng)導(dǎo)者的引導(dǎo)信息下不受其他集群個(gè)體節(jié)點(diǎn)的影響.
在此基礎(chǔ)上,設(shè)計(jì)對(duì)應(yīng)各節(jié)點(diǎn)間相互作用下的控制輸入如下式所示:
式中,第1 項(xiàng)表征了群體動(dòng)力學(xué)模型中遠(yuǎn)距吸引、近距排斥的相互作用規(guī)則;第2 項(xiàng)則表征了群體動(dòng)力學(xué)模型中速度匹配的相互作用規(guī)則;k1,k2為對(duì)應(yīng)各類相互作用規(guī)則的權(quán)重系數(shù);Ni為節(jié)點(diǎn)i 的鄰居節(jié)點(diǎn)集合;為對(duì)應(yīng)集群網(wǎng)絡(luò)拓?fù)溥B通關(guān)系的鄰接矩陣;ψ 為對(duì)應(yīng)集群個(gè)體間引力/斥力相互作用的人工勢(shì)函數(shù),在不同集群動(dòng)力學(xué)模型中具體的數(shù)學(xué)形式各不相同.
集群對(duì)抗問題中結(jié)合虛擬領(lǐng)導(dǎo)者的集群牽制控制流程如圖5 所示,集群系統(tǒng)首先根據(jù)當(dāng)前時(shí)刻敵我雙方集群狀態(tài)實(shí)時(shí)優(yōu)化網(wǎng)絡(luò)結(jié)構(gòu)與拓?fù)渲貥?gòu).在此基礎(chǔ)上,根據(jù)期望的集群系統(tǒng)空間分布與運(yùn)動(dòng)狀態(tài)劃分集群分簇社團(tuán),通過計(jì)算網(wǎng)絡(luò)節(jié)點(diǎn)度量參數(shù)確定集群網(wǎng)絡(luò)的關(guān)鍵節(jié)點(diǎn).然后,根據(jù)集群系統(tǒng)關(guān)鍵節(jié)點(diǎn)與其他網(wǎng)絡(luò)節(jié)點(diǎn)信息反饋,確定虛擬領(lǐng)導(dǎo)者與網(wǎng)絡(luò)節(jié)點(diǎn)的控制輸入.最后,通過集群系統(tǒng)網(wǎng)絡(luò)節(jié)點(diǎn)的空間分布與運(yùn)動(dòng)狀態(tài)更新實(shí)現(xiàn)集群對(duì)抗的作戰(zhàn)推演與節(jié)點(diǎn)更新.
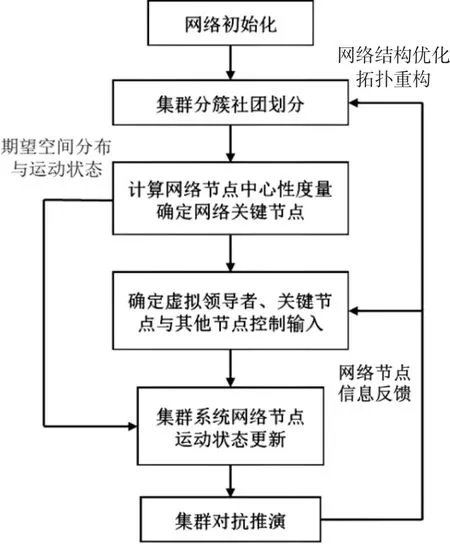
圖5 集群對(duì)抗?fàn)恐瓶刂屏鞒淌疽鈭DFig 5 Flow diagram of swarm confrontation pinning control
3.2 基于有限觀測信息的對(duì)手建模
集群對(duì)抗的對(duì)手建模從個(gè)體運(yùn)動(dòng)狀態(tài)、群體協(xié)同行為與集群戰(zhàn)術(shù)意圖出發(fā),通過對(duì)敵方集群系統(tǒng)的觀測信息推斷敵方集群系統(tǒng)模型[44].其中,敵方集群系統(tǒng)的空間分布與個(gè)體運(yùn)動(dòng)狀態(tài)信息可以通過局部態(tài)勢(shì)感知確定,在此基礎(chǔ)上根據(jù)有限觀測信息實(shí)現(xiàn)敵方集群系統(tǒng)模型的推斷.
由于集群系統(tǒng)時(shí)序狀態(tài)信息的變化規(guī)律能夠反映集群系統(tǒng)采取的戰(zhàn)術(shù)意圖,因此,考慮采用動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)方法分析敵方集群的統(tǒng)計(jì)特征,推斷敵方集群行為與作戰(zhàn)意圖[45].設(shè)狀態(tài)變量與觀測變量
,則動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)可表示為狀態(tài)變量與觀測變量的聯(lián)合概率分布:
將動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)分為決策層和特征層兩層結(jié)構(gòu).其中,特征層選取集群個(gè)體速度V、偏航角φ 和高度h 作為觀測節(jié)點(diǎn),表征了對(duì)應(yīng)空間分布與運(yùn)動(dòng)狀態(tài)的變化特征與規(guī)律;決策層選取集群系統(tǒng)宏觀群體行為M 和作戰(zhàn)意圖A 作為狀態(tài)節(jié)點(diǎn),表征了對(duì)應(yīng)聚集、盤旋與分簇等復(fù)雜集群行為,以及合圍打擊、戰(zhàn)術(shù)騙擾與集群突防等集群對(duì)抗作戰(zhàn)戰(zhàn)術(shù).設(shè)t-1 時(shí)刻的底層狀態(tài)與觀測節(jié)點(diǎn)信息序列為e1:t,頂層決策節(jié)點(diǎn)濾波結(jié)果為At,根據(jù)設(shè)計(jì)動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)的鏈?zhǔn)浇Y(jié)構(gòu),結(jié)合式貝葉斯公式與鏈?zhǔn)酵评硪?guī)則可得t 時(shí)刻頂層決策節(jié)點(diǎn)At采取戰(zhàn)術(shù)意圖的條件概率如下式所示:
針對(duì)有限觀測信息對(duì)手建模問題的動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)推理過程如圖6 所示.集群系統(tǒng)首先根據(jù)獲取敵方集群的有限觀測信息進(jìn)行多源數(shù)據(jù)融合與目標(biāo)關(guān)聯(lián)處理,為對(duì)手建模的集群行為識(shí)別與作戰(zhàn)意圖預(yù)測提供實(shí)時(shí)輸入數(shù)據(jù).在此基礎(chǔ)上,動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)進(jìn)行網(wǎng)絡(luò)參數(shù)初始化并確定對(duì)應(yīng)狀態(tài)節(jié)點(diǎn)的條件概率與轉(zhuǎn)移概率,然后更新貝葉斯網(wǎng)絡(luò)節(jié)點(diǎn)概率分布,實(shí)現(xiàn)敵方集群系統(tǒng)狀態(tài)特征提取與行為意圖識(shí)別.
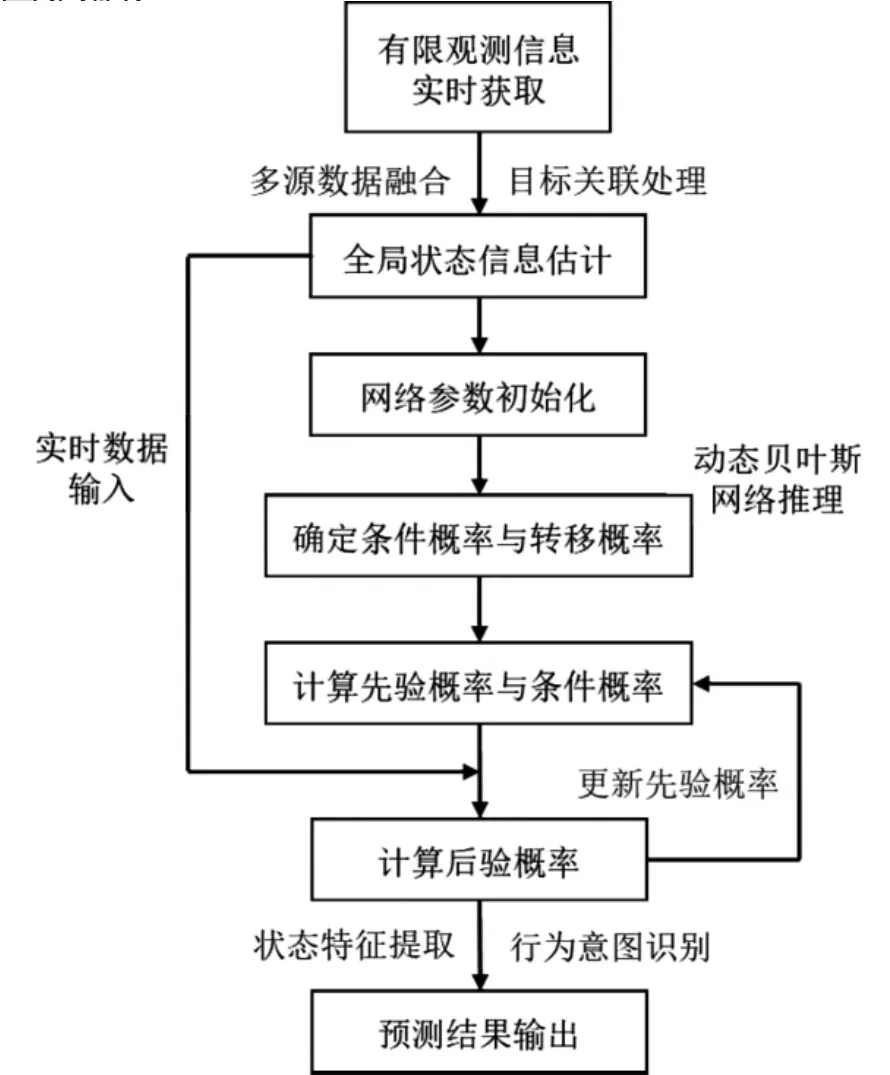
圖6 動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)推理流程示意圖Fig 6 Flow diagram of dynamic Bayesian network inference
3.3 面向集群對(duì)抗的不完全信息動(dòng)態(tài)博弈
博弈模型的不完全信息專指局中人在博弈開始前對(duì)其他局中人的事前信息了解不充分,這些事前信息泛指能夠影響博弈局勢(shì)的局中人屬性[46].在集群對(duì)抗問題中,由于雙方遭遇交戰(zhàn)時(shí)并不清楚對(duì)方的群體動(dòng)力學(xué)模型與態(tài)勢(shì)效能評(píng)估依據(jù),因此,可以將集群對(duì)抗博弈模型中的不完全信息定義為集群系統(tǒng)個(gè)體的作戰(zhàn)意圖偏好,在對(duì)手建模結(jié)果的基礎(chǔ)上,通過海薩尼轉(zhuǎn)換引入虛擬局中人“自然”,賦予博弈中各局中人的作戰(zhàn)偏好類型與對(duì)應(yīng)概率密度[47],表征了集群系統(tǒng)在當(dāng)前態(tài)勢(shì)下的作戰(zhàn)偏好是更傾向于保守策略還是激進(jìn)策略.
式中,gb為對(duì)應(yīng)藍(lán)方集群系統(tǒng)對(duì)當(dāng)前戰(zhàn)場態(tài)勢(shì)的評(píng)估結(jié)果;At為對(duì)手建模中對(duì)應(yīng)t 時(shí)刻動(dòng)態(tài)貝葉斯頂層決策節(jié)點(diǎn)濾波結(jié)果;e1:t為對(duì)手建模中對(duì)應(yīng)t-1 時(shí)刻的底層狀態(tài)與觀測節(jié)點(diǎn)信息序列.
式中,V 為對(duì)應(yīng)博弈模型中采取相應(yīng)策略的效用函數(shù);πk為對(duì)應(yīng)局中人采取的混合策略組合;為集群協(xié)同態(tài)勢(shì)效能評(píng)估函數(shù);s 為對(duì)應(yīng)局中人采取混合策略的動(dòng)作狀態(tài)轉(zhuǎn)移.
不完全信息動(dòng)態(tài)博弈模型的精煉貝葉斯納什均衡是推斷概率和混合策略組合共同組成的策略評(píng)估,是完全信息動(dòng)態(tài)博弈子博弈精煉納什均衡與不完全信息靜態(tài)博弈貝葉斯納什均衡的結(jié)合[48].對(duì)此,集群對(duì)抗博弈模型的精煉貝葉斯納什均衡定義如下:設(shè)是局中人在全部博弈階段中的某一混合策略組合序列,是除此局中人i 外其他局中人的全部混合策略組合序列.若對(duì)每一個(gè)局中人i在全部博弈階段任意策略組合序列都有:
針對(duì)集群對(duì)抗問題的不完全信息動(dòng)態(tài)博弈過程如圖7 所示.集群對(duì)抗采用海薩尼轉(zhuǎn)換將不完全信息動(dòng)態(tài)博弈轉(zhuǎn)換為完全不完美信息動(dòng)態(tài)博弈,通過自然確定局中人概率分布并采用貝葉斯估計(jì)推斷敵方未知屬性與概率分布.在此基礎(chǔ)上,集群系統(tǒng)通過協(xié)同戰(zhàn)術(shù)意圖決策進(jìn)行動(dòng)作狀態(tài)轉(zhuǎn)移,并根據(jù)效用函數(shù)求解對(duì)應(yīng)貝葉斯納什均衡的集群對(duì)抗協(xié)同策略.
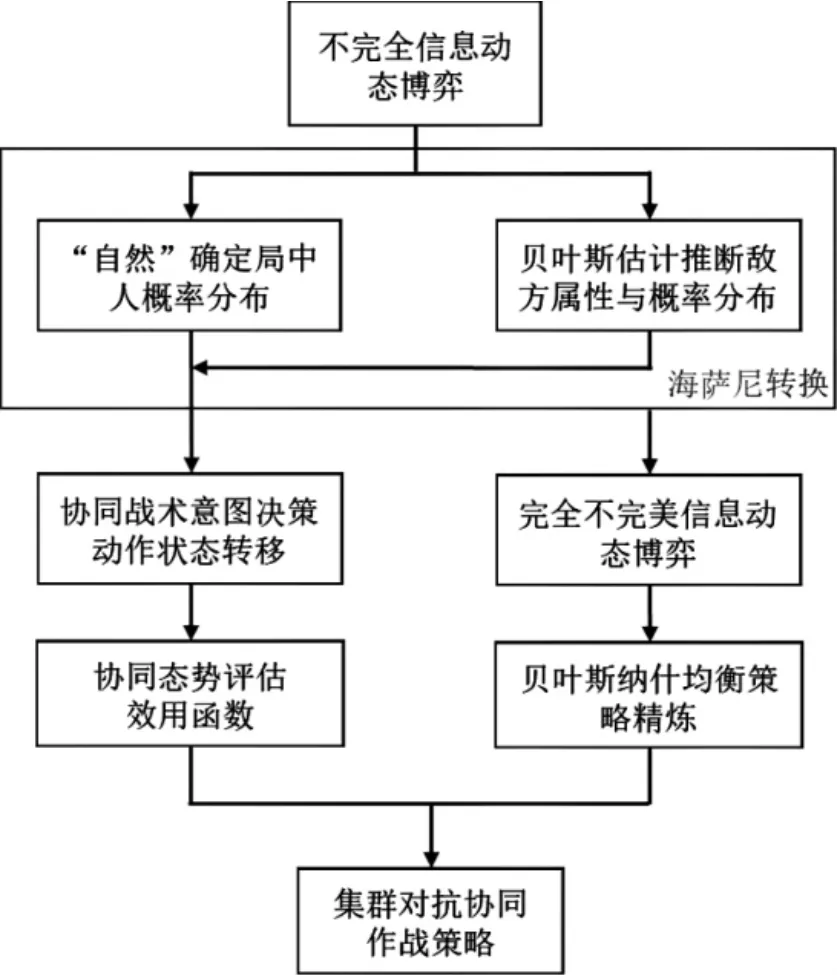
圖7 集群博弈對(duì)抗流程示意圖Fig 7 Flow diagram of swarm game confrontation
4 研究難點(diǎn)與挑戰(zhàn)
4.1 動(dòng)態(tài)對(duì)抗過程中集群網(wǎng)絡(luò)的即時(shí)修復(fù)
集群拓?fù)渚W(wǎng)絡(luò)結(jié)構(gòu)的連通性與魯棒性是集群系統(tǒng)發(fā)揮協(xié)同作戰(zhàn)效能的關(guān)鍵.在高動(dòng)態(tài)強(qiáng)對(duì)抗的作戰(zhàn)過程中,集群系統(tǒng)復(fù)雜行為的形成與群體智能的涌現(xiàn)依賴于集群系統(tǒng)的持續(xù)連通與信息交互.現(xiàn)有的網(wǎng)絡(luò)結(jié)構(gòu)優(yōu)化設(shè)計(jì)與拓?fù)渲貥?gòu)研究主要針對(duì)無線傳感系統(tǒng)與電網(wǎng)配電系統(tǒng)等問題[49-50].由于傳感器網(wǎng)絡(luò)和電網(wǎng)系統(tǒng)中的節(jié)點(diǎn)不具備移動(dòng)能力,靜態(tài)網(wǎng)絡(luò)節(jié)點(diǎn)構(gòu)成的固定網(wǎng)絡(luò)系統(tǒng)能夠預(yù)先確定各節(jié)點(diǎn)的重要程度,根據(jù)復(fù)雜網(wǎng)絡(luò)性質(zhì)將網(wǎng)絡(luò)節(jié)點(diǎn)分為關(guān)鍵節(jié)點(diǎn)、冗余節(jié)點(diǎn)和普通節(jié)點(diǎn)3 種不同類型.在此基礎(chǔ)上,針對(duì)不同類型節(jié)點(diǎn)的失效情況預(yù)先設(shè)定對(duì)應(yīng)網(wǎng)絡(luò)節(jié)點(diǎn)故障的重構(gòu)策略與方案.在對(duì)抗過程中,集群網(wǎng)絡(luò)節(jié)點(diǎn)的空間分布與個(gè)體的運(yùn)動(dòng)狀態(tài)在高度動(dòng)態(tài)變化,各節(jié)點(diǎn)在集群網(wǎng)絡(luò)中的重要程度與對(duì)應(yīng)節(jié)點(diǎn)類型也隨之發(fā)生變化.傳統(tǒng)網(wǎng)絡(luò)重構(gòu)與優(yōu)化方法難以適應(yīng)無人集群系統(tǒng)的動(dòng)態(tài)性場景與實(shí)時(shí)性要求,需要進(jìn)一步研究集群網(wǎng)絡(luò)的在線故障診斷與即時(shí)修復(fù)策略,在網(wǎng)絡(luò)故障診斷結(jié)果的基礎(chǔ)上定位失效節(jié)點(diǎn)類型與其對(duì)應(yīng)的鄰居節(jié)點(diǎn),由其中冗余節(jié)點(diǎn)自組織代替失效節(jié)點(diǎn),實(shí)現(xiàn)集群網(wǎng)絡(luò)的信息交互與作戰(zhàn)能力的自適應(yīng)恢復(fù).因此,集群系統(tǒng)網(wǎng)絡(luò)的在線重構(gòu)與即時(shí)修復(fù)是群體動(dòng)力學(xué)模型未來實(shí)際應(yīng)用中關(guān)鍵難點(diǎn)與挑戰(zhàn).
4.2 局部感知下敵方集群的全局狀態(tài)估計(jì)
對(duì)手建模問題一方面需要對(duì)多源局部態(tài)勢(shì)感知信息進(jìn)行融合處理獲得敵方集群整體統(tǒng)計(jì)特征等戰(zhàn)場態(tài)勢(shì)信息;另一方面需要根據(jù)敵方集群的空間分布與運(yùn)動(dòng)狀態(tài)信息推斷敵方整體集群的行為樣式與作戰(zhàn)意圖[51].而集群對(duì)抗的交戰(zhàn)雙方在遭遇時(shí)僅能通過個(gè)體的局部觀測獲取敵方集群個(gè)體的狀態(tài)與位置信息,往往無法直接獲取敵方集群的全局空間分布與運(yùn)動(dòng)狀態(tài)信息.傳統(tǒng)的數(shù)據(jù)融合與目標(biāo)關(guān)聯(lián)算法研究主要集中在多傳感器多目標(biāo)跟蹤問題[52],通過濾波方法對(duì)同一時(shí)刻多傳感器的探測信息進(jìn)行融合處理,實(shí)現(xiàn)對(duì)多個(gè)目標(biāo)的狀態(tài)定位與估計(jì).在此基礎(chǔ)上,采用目標(biāo)關(guān)聯(lián)算法實(shí)現(xiàn)對(duì)不同時(shí)刻多目標(biāo)跟蹤的數(shù)據(jù)關(guān)聯(lián),通過計(jì)算相似度函數(shù)確定當(dāng)前探測目標(biāo)與已形成軌跡跟蹤目標(biāo)之間的關(guān)聯(lián)概率.由于集群對(duì)抗過程中,不同時(shí)刻個(gè)體節(jié)點(diǎn)觀測到的敵方目標(biāo)數(shù)量與對(duì)應(yīng)位置動(dòng)態(tài)變化.傳統(tǒng)數(shù)據(jù)融合與目標(biāo)關(guān)聯(lián)算法對(duì)無人集群系統(tǒng)觀測數(shù)據(jù)偏差的敏感度更高,數(shù)據(jù)融合的準(zhǔn)確性與目標(biāo)關(guān)聯(lián)的成功率難以保證.因此,集群系統(tǒng)在局部觀測下對(duì)敵方集群整體的全局狀態(tài)估計(jì)是對(duì)手建模的核心難點(diǎn)與挑戰(zhàn).
4.3 多階段博弈對(duì)抗納什均衡策略的精煉
集群系統(tǒng)的博弈對(duì)抗具有較長的對(duì)抗過程與博弈階段,對(duì)應(yīng)集群對(duì)抗的分布式不完全信息動(dòng)態(tài)博弈模型可能存在多組混合策略組合序列滿足納什均衡條件.因此,集群系統(tǒng)多階段博弈對(duì)抗需要結(jié)合集群對(duì)抗的具體作戰(zhàn)任務(wù)需求,實(shí)現(xiàn)對(duì)博弈模型納什均衡解的精煉.由于集群對(duì)抗問題中集群的作戰(zhàn)規(guī)模大,對(duì)應(yīng)博弈模型精煉納什均衡的計(jì)算復(fù)雜度高且求解困難.傳統(tǒng)的分布式不完全信息博弈模型納什均衡求解與精煉主要采用反事實(shí)遺憾值最小化算法(counterfactual regret minimization,CFR)[53],通過遺憾值表征當(dāng)前迭代策略相較于精煉納什均衡策略的收益效用偏差,并結(jié)合反事實(shí)值評(píng)價(jià)對(duì)應(yīng)個(gè)體當(dāng)前策略下遺憾值最小化指標(biāo),使得對(duì)應(yīng)全局博弈的平均整體遺憾值最優(yōu).隨著深度強(qiáng)化學(xué)習(xí)技術(shù)的發(fā)展,神經(jīng)網(wǎng)絡(luò)因其較強(qiáng)的擬合能力引入納什均衡策略求解方法中,神經(jīng)虛擬自我對(duì)弈算法(neural stochastic fictitious play,NSFP)[54]通過建立對(duì)應(yīng)博弈模型中對(duì)抗雙邊的局中人策略空間,訓(xùn)練對(duì)應(yīng)敵方平均策略的最佳響應(yīng)策略,實(shí)現(xiàn)對(duì)應(yīng)博弈模型納什均衡策略的求解與精煉.在傳統(tǒng)強(qiáng)化學(xué)習(xí)模型的基礎(chǔ)上,進(jìn)一步結(jié)合深度神經(jīng)網(wǎng)絡(luò)優(yōu)化強(qiáng)化學(xué)習(xí)訓(xùn)練架構(gòu)設(shè)計(jì),建立泛化性博弈模型納什均衡求解框架,是未來多階段博弈對(duì)抗納什均衡策略求解與精煉的突破方向.
5 結(jié)論
本文結(jié)合無人機(jī)集群反制與對(duì)抗的典型任務(wù)場景需求與感知決策控制的基本作戰(zhàn)流程,從無人機(jī)集群系統(tǒng)的群體動(dòng)力學(xué)模型、統(tǒng)計(jì)特征模型和博弈對(duì)抗模型出發(fā),探討了集群對(duì)抗研究中群體行為演化控制問題、對(duì)手建模問題與集群博弈對(duì)抗問題的理論基礎(chǔ)與關(guān)鍵技術(shù).在此基礎(chǔ)上,針對(duì)集群對(duì)抗過程中戰(zhàn)場態(tài)勢(shì)高度動(dòng)態(tài)變化、敵我雙方對(duì)抗策略信息不完備的特點(diǎn),分析了動(dòng)態(tài)集群網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)即時(shí)修復(fù),敵方集群全局狀態(tài)估計(jì)與集群博弈對(duì)抗納什均衡策略求解與精煉的研究難點(diǎn)與挑戰(zhàn),為未來無人機(jī)集群系統(tǒng)反制與對(duì)抗的研究提供了新的解決思路與借鑒參考.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19