矢量泵噴推進潛航器回轉性能研究
2024-01-19 06:56:08韓偉,鄧倪
船舶力學 2024年1期
關鍵詞:系統
韓 偉,鄧 倪
(1.蘭州理工大學能源與動力工程學院,蘭州 730050;2.甘肅省流體機械重點實驗室,蘭州 730050)
0 引 言
隨著船舶動力系統的不斷更新以及船舶回轉性能、安全性能需求的提高,矢量泵噴推進器逐漸成為國內外學者研究的重點。即使通過設計不同形式的船舵也很難解決在低航速下其控制效率大幅降低的問題,而矢量泵噴推進器能夠有效地解決傳統船舵控制在低航速下控制效率低的問題[1]。
目前,國內外學者對于矢量泵噴潛航器回轉性能的研究主要針對矢量。Mohseni[2]提出了一種新的水下機器人低速機動機制,采用緊湊的脈動射流執行器實現低速機動能力;Geng 等[3]通過雙合成射流執行器的同相工作實現水下航行器的橫向運動,通過這兩個執行器的異相工作實現偏航運動;Chocron 等[4]采用多個推進器組成推力配置矩陣,以合成合適的推進系統;Cavallo 等[5]研究了一種新概念、配備三自由度矢量推進器的自動水下航行器;Kaya等[6]采用不同方向的固定推進器實現預定軌跡的航行;Nawrot[7]探討了許多推力矢量裝置的替代設計策略和概念;Liu 等[8]提出了一種帶有矢量推力導管推進器的魚雷形狀水下機器人,并設計了矢量推進器的控制方案,實現了在零速或慢速前進速度下完成任務;陳路偉等[1]提出一種采用可動矢量噴管的噴水推進式水下航行器,可以有效提高機動性;高富東等[9]提出采用多矢量水下推進航行器,通過調整推進器的偏轉方向實現對航行器的姿態控制;高雙[10]建立了推力矢量船舶運動的仿真模型,獲得噴角的改變對船舶縱向推力損失和轉向力矩損失的影響規律,為了保證船舶啟動過程的安全運行,對船舶轉彎過程中的橫傾角度加以控制,以獲得此狀態時的噴管轉動角度;曾薄文[11]利用MMG 分離原理建立了噴水推進無人艇的操縱運動方程,在矢量噴管轉動的過程中,噴流偏轉使得縱向力、轉向力矩和速度發生變化,基于開環運動模型,總結出了噴管偏轉對潛艇航行速度損失的影響規律。綜合矢量推進器以及舵的優點,同時使用舵以及矢量噴管轉向,能夠在較小舵角及噴管偏角的條件下實現較大角度的轉向,進一步提高潛航器機動性。多套控制系統的存在也可以避免單套控制系統失效情況下潛航器失控。
為了改善潛航器的回轉性能,本文在傳統船舵控制的基礎上結合矢量推進器控制,通過對潛航器回轉運動進行仿真,分析不同控制模式下的回轉性能,以驗證矢量推進器對潛航器回轉性能的影響,以期為潛航器應用矢量推進器的研究提供一定的參考。
1 潛航器水平面運動數學模型
潛航器在水下的操縱運動,在一般情況下可以視為剛體在流體中的空間運動[12]。潛航器在水中運動所受到外力大致上可以分為流體動力和非流體動力兩大類。本文研究潛航器在水中做水平面運動時通過不同控制裝置的操縱運動,建立水平面運動模型并進行仿真。
1.1 水平面操縱運動的一般方程
本文采用國際拖曳水池會議(International Towing Tank Conference,簡稱為ITTC)推薦的和造船與輪機工程學會(SNAME)術語公報[13]的體系,包括兩個右手系,如圖1 所示:一個為原點固定在地球上的固定坐標系E-ξη;另一個為原點固定在潛航器上,隨潛航器共同運動的運動坐標系G-xy。
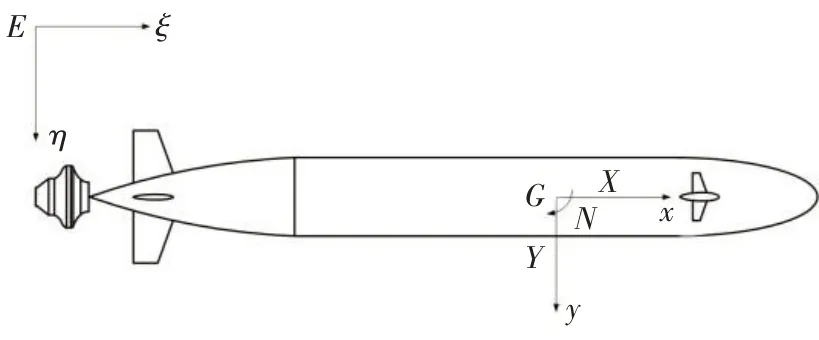
圖1 矢量泵噴推進潛航器水平面運動坐標系Fig.1 Horizontal motion coordinate system of vector pump jet propulsion submersible
根據質心運動定理以及相對于質心運動的動量定理、動量矩定理,推導出潛航器水平面操縱運動的一般方程:
式中,m為潛航器質量,u、v分別為潛航器重心G的航速在x、y方向上的分量,u?、v?為對應的加速度,r為角速度,Iz為潛航器對隨體坐標系Gz軸的轉動慣量,X、Y分別為潛航器所受外力在x、y方向上的分量,N為外力對重心G的力矩。
1.2 作用于潛航器的力與力矩
在潛航器做水平面運動時,潛航器所受到的非流體動力,如浮力、重力等,可以不作考慮,因此,本文只考慮潛航器在水中所受到的流體動力。
本文所研究的對象為艇體-舵-矢量泵噴推進器所組成的大系統,假設潛航器在水下處于無限深廣、靜水的環境中,此時,潛航器所受到的流體動力只取決于潛航器自身的運動狀態,表示為函數形式:
式中,F(X,Y,N)為潛航器所受外力與力矩,δr、δ?r分別為船舵的轉動角以及轉舵速度,δn、δ?n分別為矢量噴管的偏轉角以及轉動速度,n為泵噴推進器的轉速。
一般情況下,對泵噴推進器所產生的推力做單獨處理,記為FT(XT,YT)和NT,如圖2所示:
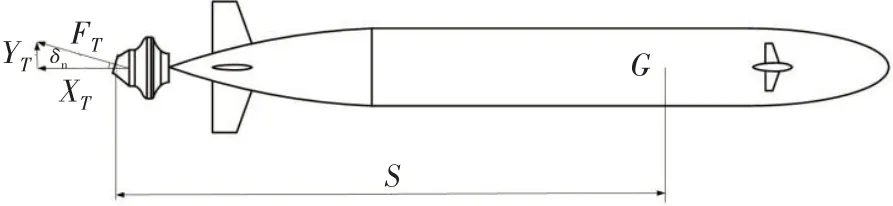
圖2 矢量泵噴推進器的推力分解示意圖Fig.2 Schematic diagram of thrust of vector pump jet propeller
式中,S為噴管出口中心到潛航器重心的距離。
本文采用矢量螺旋混流式泵噴推進器,由螺旋混流式泵以及矢量噴管組成,按比例縮小后的模型泵設計參數如表1所示。
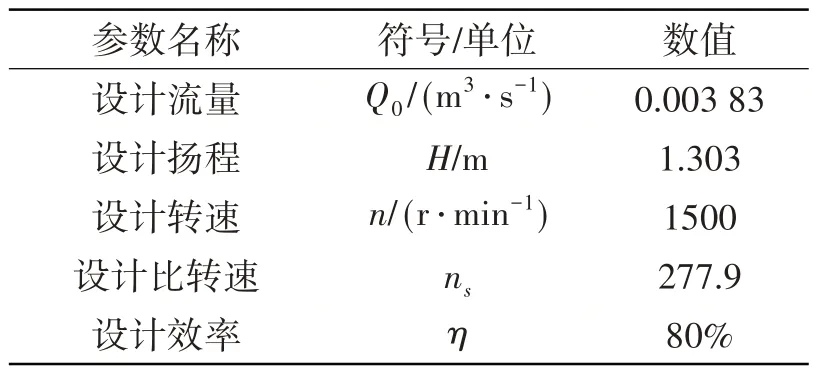
表1 螺旋混流泵設計參數Tab.1 Design parameters of screw mixed flow pump
矢量泵噴推進器依靠葉輪對水流進行加速增壓,水流通過噴管向后噴射加速對潛航器產生反作用力,即泵噴推進器產生的推力FT,推力的大小等于單位時間上進出推進器的水流的動量差:
式中,Qm為流經泵噴推進器的質量流量,Vj、Vs分別為矢量泵噴推進器進出口流速。
本文采用的矢量噴管為收縮噴管,噴管收縮比為κ,根據連續方程可得噴管進出口速度比為
根據式(4)和式(5),結合螺旋混流泵的水力參數、無量綱參數,可推導出推力與轉速的函數關系如下[14]:
式中,N0為設計軸功率,η0為設計水力效率,?為流量的無量綱參數,b2為葉輪出口寬度,ψ為揚程的無量綱參數,Aj、As分別為矢量泵噴推進器進出口面積。
根據式(6)~(7)可以通過相似理論由模型泵推力系數C計算出對應的實際尺寸的泵噴推進器推力系數。
忽略船舵和矢量噴管的轉動速度,將F投影到運動系坐標軸上,表示為函數形式:
根據多元函數的泰勒級數展開原理,以潛航器做等速直航的平衡狀態,即u0≠0、v0=r0=u?0=v?0=r?0=δr0=0為基準運動,忽略二階以上高階項的影響,對其進行泰勒級數展開:
式中,X0、Xu、…、Xuu、…都是水動力分量對潛航器運動參數的偏導數在展開點的值,統稱為水動力系數。
1.3 水平面操縱運動方程
考慮到潛航器的左右對稱性,忽略比較小的水動力系數,同時,為了書寫方便,將二階項的系數1/2!并入對應的水動力系數中,于是得到水平面操縱運動非線性方程:
1.4 水平面操縱運動重心軌跡方程
根據式(12),在潛航器質量、噴管出口中心到潛航器重心的距離、潛航器對隨體坐標系Gz軸的轉動慣量和各項水動力系數已知的情況下,給定潛航器操縱規律δr(t)、δn(t),可以求出潛航器的各項運動參數u(t)、v(t)、r(t),記潛航器的首向角為φ,則φ?(t)=r(t),結合這些運動參數可以求出潛航器的重心軌跡方程:
2 仿真實驗
本文所使用的潛航器模型出自文獻[15],采用的矢量泵噴推進器則是基于課題組所設計的螺旋混流式矢量泵噴推進器,通過對不同操縱機制,即船-舵-推進器、船-矢量推進器和船-舵-矢量推進器三種不同的潛航器控制方法進行仿真對比,分析潛航器的最佳操縱模式。
2.1 低航速下的潛航器回轉性能
為了對比低航速下潛航器做回轉運動時三種控制方法的回轉性能,本文設置初始航速為1 m/s,設置舵的偏角、矢量噴管的偏角如表2 所示,仿真結果如圖3所示。
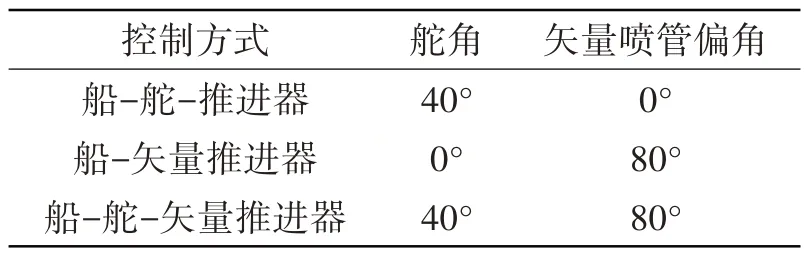
表2 三種控制方法下的參數設置Tab.2 Parameter setting under three control modes
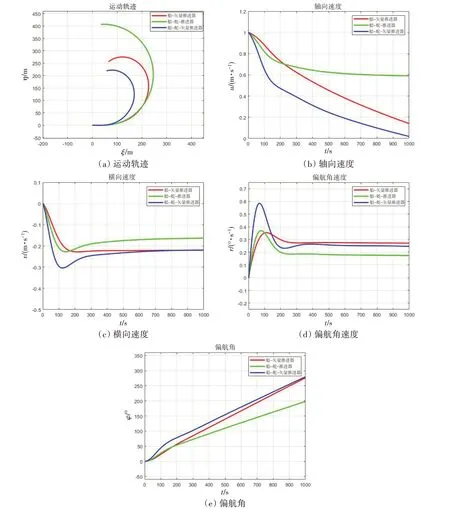
圖3 三種控制方式的仿真結果Fig.3 Simulation results of three control modes
圖3顯示了低航速下船-矢量推進器、船-舵-推進器和船-舵-矢量推進器三種不同的控制方法時潛航器做回轉運動的仿真結果。由圖3(a)潛航器的運動軌跡可以看出,船-矢量推進器系統的回轉半徑約為131 m,船-舵-推進器系統的回轉半徑約為201 m,船-舵-矢量推進器系統的回轉半徑約為102 m,使用矢量推進器可以有效地減小潛航器的回轉半徑,船-舵-矢量推進器系統的回轉半徑最小。由圖3(b)潛航器的軸向速度可以看出,大角度的矢量噴管偏角對潛航器的軸向速度影響較大,這與推力矢量的偏轉導致軸向推力下降有關。由圖3(c)潛航器的橫向速度可以看出:船-舵-推進器系統的橫向速度的穩定值最小,為0.164 m/s;而船-矢量推進器系統的橫向速度與船-舵-矢量推進器系統的橫向速度的穩定值幾乎相等,為0.220 m/s。由圖3(d)潛航器的偏航角速度可以看出:船-舵-推進器系統的偏航角速度最小,為0.175°/s;船-矢量推進器系統的偏航角速度最大,為0.272°/s;而船-舵-矢量推進器系統的偏航角速度為0.248°/s。由圖3(e)潛航器的偏航角可以看出:船-舵-推進器系統的偏航角最小,為197.670 °,潛航器偏航180°需要896 s;船-舵-矢量推進器系統的偏航角最大,為279.030 °/s,潛航器偏航180°需要601 s;而船-矢量推進器系統的偏航角為275.593 °/s,潛航器偏航180°需要647 s。使用矢量推進器可以有效加快低航速下潛航器的偏航速度,使得低航速下潛航器掉頭時間縮短4~5 min。
2.2 推進器設計轉速下的潛航器回轉性能
本節設置泵噴推進器轉速為1500 r/min,初始航速為10 m/s,設置舵的偏角分別為0°、5°、10°、15°、20°、25°、30°、35°、40°,矢量噴管的偏角分別為0°、5°、10°、15°、20°、25°、30°、35°、40°,除直航運動條件,即舵與矢量噴管偏角均為0°外,對共80種組合進行仿真,仿真結果如圖4所示。
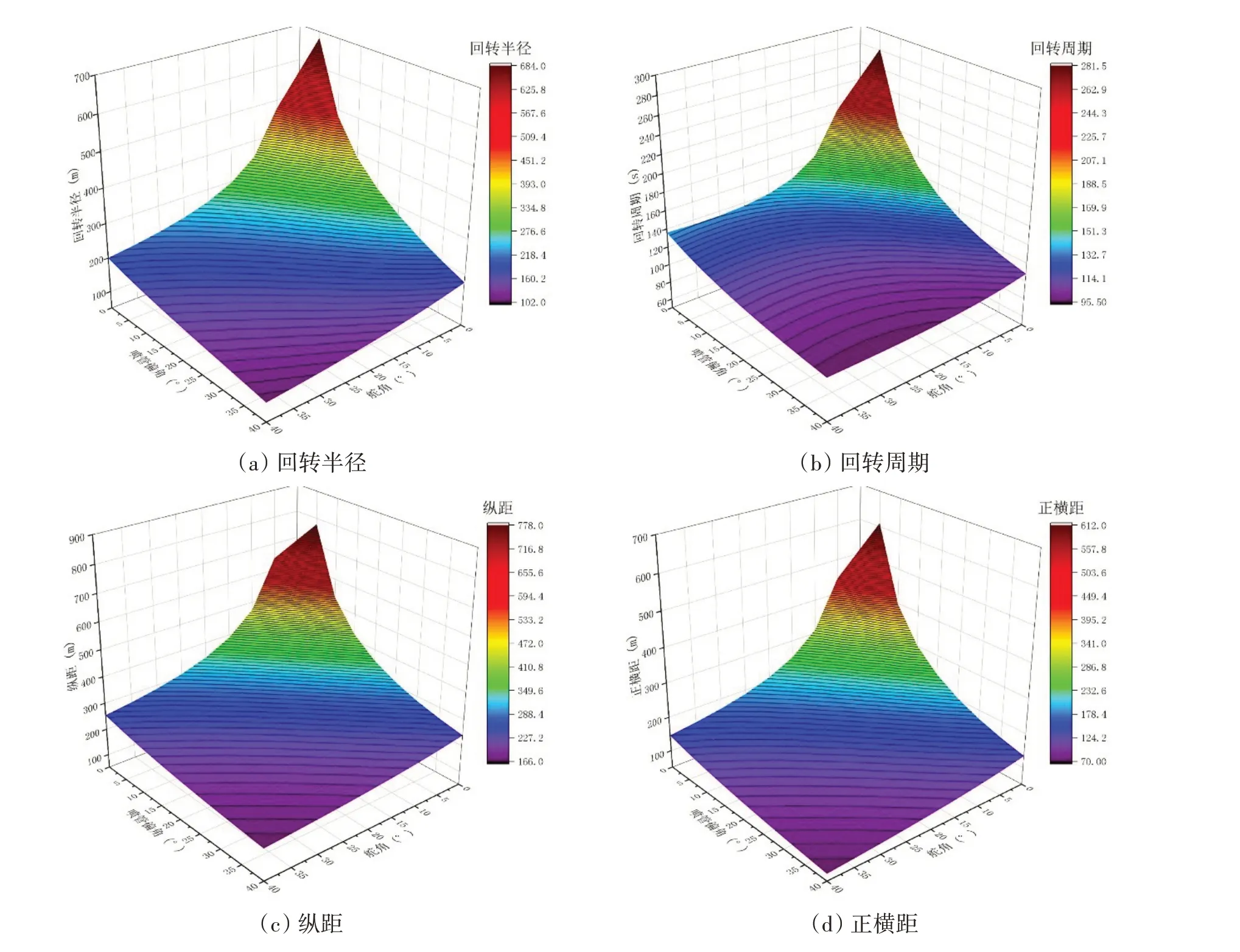
圖4 設計轉速下回轉運動特征參數Fig.4 Characteristic parameters of rotary motion at design speed
圖4表示推進器在設計轉速下不同舵角、矢量噴管偏角時潛航器做回轉運動的仿真結果。由圖4(a)潛航器的回轉半徑可以看出,船-舵-推進器系統的回轉半徑在舵角小于33°時小于船-矢量推進器系統對應噴管偏角時的回轉半徑,但當舵角大于33°后,船-矢量推進器系統對應的回轉半徑更小,這與矢量推進器提供的轉矩變化率隨噴管偏角的增大而增大相關,而船-舵-矢量推進器系統的回轉半徑最小,這也表明了使用矢量泵噴推進器可以有效減小潛航器的回轉半徑。由圖4(b)潛航器的回轉周期可以看出,船-舵-推進器系統的回轉周期在舵角小于23°時小于船-矢量推進器系統對應噴管偏角時的回轉周期,另一方面,當舵角達到30°后繼續增大舵角,潛航器的回轉周期幾乎不變,而增大噴管偏角則可以減小回轉周期。由圖4(c)、圖4(d)潛航器的縱距、正橫距可以看出,在小舵角(噴管偏角)情況下,船-舵-推進器系統的縱距、正橫距小于船-矢量推進器系統對應噴管偏角時的縱距、正橫距,但在大舵角(噴管偏角)情況下,船-矢量推進器系統對應的縱距、正橫距更小,而船-舵-矢量推進器系統的縱距、正橫距最小。由圖4(e)潛航器的戰術直徑可以看出,在小舵角(噴管偏角)情況下,船-舵-推進器系統的戰術直徑小于船-矢量推進器系統對應噴管偏角時的戰術直徑,但在大舵角(噴管偏角)情況下,船-矢量推進器系統對應的戰術直徑更小,而船-舵-矢量推進器系統的戰術直徑最小。總的來說,矢量推進器的運用可以改進潛航器的回轉性能,船-舵-矢量推進器系統的回轉性能為最佳。
通過對圖4中數據進行非線性擬合,采用rational2D 擬合方法,建立回轉半徑Rs、回轉周期T、縱距La、正橫距Ld、戰術直徑DT隨舵角δr、噴管偏角δn變化的數學模型:
2.3 控制軸向航速下的潛航器回轉性能
本節設置初始航速為10 m/s,控制軸向航速為10 m/s,設置舵的偏角分別為0°、5°、10°、15°、20°、25°、30°、35°、40°,矢量噴管的偏角分別為0°、5°、10°、15°、20°、25°、30°、35°、40°,除直航運動條件,即舵與矢量噴管偏角均為0°外,對共80種組合進行仿真,仿真結果如圖5所示。
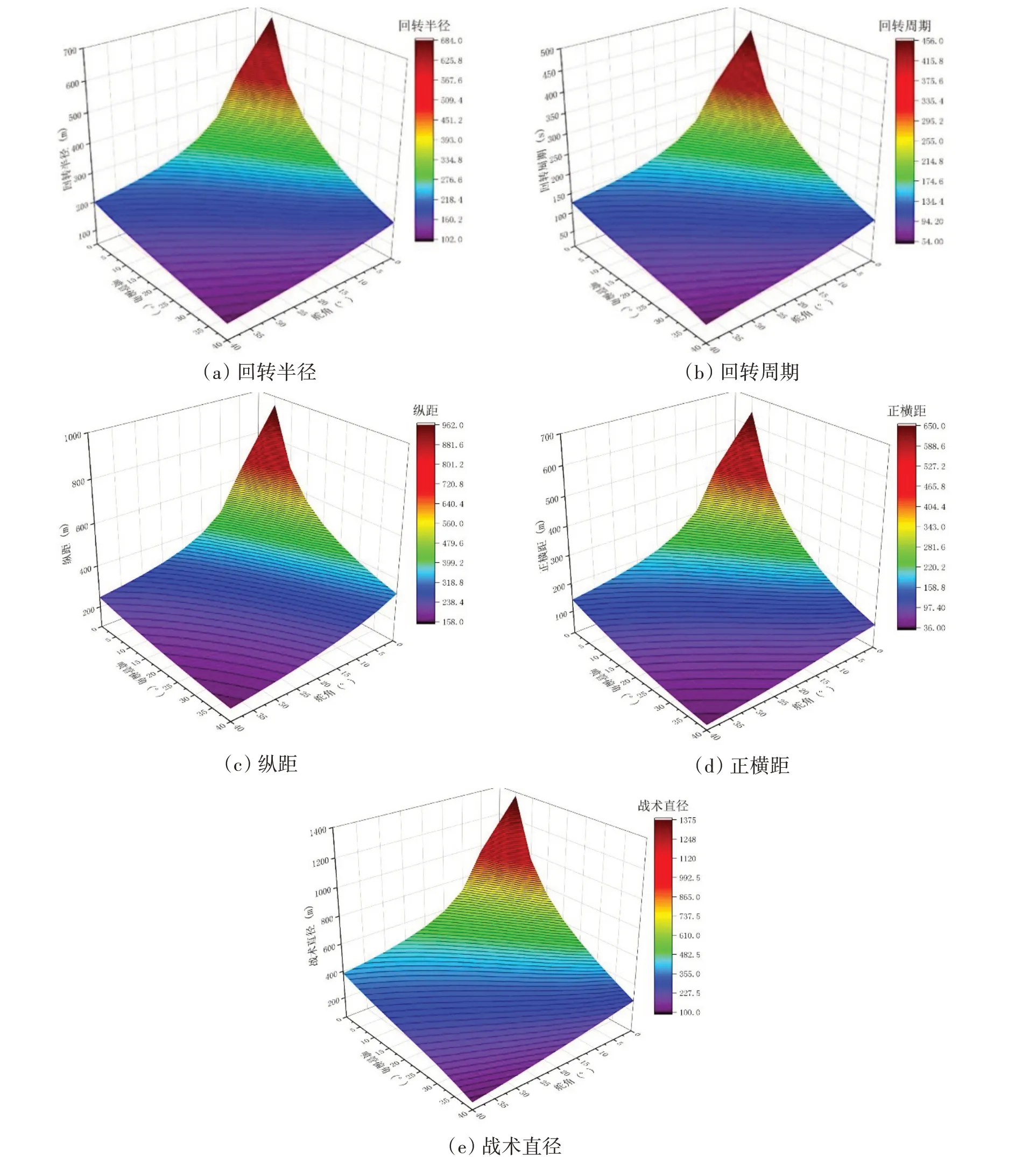
圖5 控制軸向航速下回轉運動特征參數Fig.5 Characteristic parameters of rotary motion at controlled axial speed
圖5 表示在控制軸向航速為10 m/s 下不同舵角、矢量噴管偏角時潛航器做回轉運動的仿真結果。由圖5(a)潛航器的回轉半徑與圖4(a)對比可以看出,控制軸向航速(此時泵噴推進器的轉速由軸向航速控制器調節)時的回轉半徑與保持泵噴推進器的轉速(此時潛航器有軸向航速損失)時的回轉半徑幾乎相同,可見舵角、矢量噴管偏角的大小才是決定潛航器回轉半徑的關鍵因素,運動參數與泵噴推進器轉速的不同對回轉半徑的影響很小。由圖5(b)潛航器的回轉周期可以看出,船-舵-推進器系統的回轉周期在舵角小于37°時小于船-矢量推進器系統對應噴管偏角時的回轉周期,而增大舵角或噴管偏角均可以減小回轉周期,與圖4(b)對比可以看出,在小舵角(噴管偏角)情況下,控制軸向航速會增大回轉周期,但在大舵角(噴管偏角)情況下,特別對于船-舵-矢量推進器系統來說,可以大幅度減小潛航器的回轉周期。由圖5(c)潛航器的縱距可以看出,船-舵-推進器系統的縱距小于船-矢量推進器系統對應噴管偏角時的縱距,而船-舵-矢量推進器系統的縱距最小,與圖4(c)對比可以看出,對于船-舵-推進器系統,控制軸向航速可以減小縱距;對于船-矢量推進器系統,在小噴管偏角情況下,控制軸向航速可以減小縱距,但在大噴管偏角情況下,控制軸向航速會增大縱距;對于船-舵-矢量推進器系統,在大舵角、小噴管偏角情況下,控制軸向航速可以減小縱距,但在小舵角、大噴管偏角情況下,控制軸向航速會增大縱距。由圖5(d)潛航器的正橫距可以看出,在小舵角(噴管偏角)情況下,船-舵-推進器系統的正橫距小于船-矢量推進器系統對應噴管偏角時的正橫距,但在大舵角(噴管偏角)情況下,船-矢量推進器系統對應的正橫距更小,而船-舵-矢量推進器系統的正橫距最小,與圖4(d)對比可以看出,對于船-舵-推進器系統,控制軸向航速可以減小正橫距;對于船-矢量推進器系統,在小噴管偏角情況下,控制軸向航速會增大正橫距,但在大噴管偏角情況下,控制軸向航速可以減小正橫距;對于船-舵-矢量推進器系統,在大舵角、大噴管偏角情況下,控制軸向航速可以減小正橫距,但在小舵角、小噴管偏角情況下,控制軸向航速會增大正橫距。由圖5(e)潛航器的戰術直徑可以看出,在小舵角(噴管偏角)情況下,船-舵-推進器系統的戰術直徑小于船-矢量推進器系統對應噴管偏角時的戰術直徑,但在大舵角(噴管偏角)情況下,船-矢量推進器系統對應的戰術直徑更小,而船-舵-矢量推進器系統的戰術直徑最小,與圖4(e)對比可以看出,對于船-舵-推進器系統,控制軸向航速可以減小戰術直徑,對于船-矢量推進器系統,在小噴管偏角情況下,控制軸向航速會增大戰術直徑,但在大噴管偏角情況下,控制軸向航速可以減小戰術直徑;對于船-舵-矢量推進器系統,在大舵角、大噴管偏角情況下,控制軸向航速可以減小戰術直徑,但在小舵角、小噴管偏角情況下,控制軸向航速會增大戰術直徑。總的來說,對于船-舵-矢量推進器系統,控制軸向航速可以有效提高大舵角(噴管偏角)情況下潛航器的回轉性能,以舵與矢量噴管偏角均為40°時為例,控制軸向航速時,回轉周期由95.99 s減小至54.45 s,縱距由166.5 m 減小至159.4 m,正橫距由70.4 m 減小至37.5 m,戰術直徑由228.5 m 減小至102.8 m。
通過對圖5中數據進行非線性擬合,采用rational2D 擬合方法,建立回轉半徑Rs、回轉周期T、縱距La、正橫距Ld、戰術直徑DT隨舵角δr、噴管偏角δn變化的數學模型:
3 結 語
本文研究的是船-舵-推進器、船-矢量推進器和船-舵-矢量推進器三種不同的控制方法時潛航器的回轉性能,通過對低航速、控制泵噴推進器轉速、控制潛航器軸向航速三種不同條件下潛航器做水平面回轉運動進行仿真,證明了矢量推進器可以改善潛航器的回轉性能,船-舵-矢量推進器系統更是可以大幅度提高潛航器的回轉性能,另一方面,通過控制潛航器軸向航速可以在以提高能耗為代價的前提下提高潛航器的回轉性能。本研究結果可以為潛航器的操縱方式提供有價值的參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
